Изобретение относится к весоизмерительной технике, в частности к технике взвешивания вагонов в статике и движении, а также может быть использовано для оперативного автоматизированного определения параметров вагонов поезда в процессе его движения.
Известны вагонные весы в движении (см. Гроссман Н.Я., Шнырев Г.Д. Автоматизированные системы взвешивания и дозирования. - М.: Машиностроение. 1988. - 296 с.: ил., с.238-241), содержащие узлы въезда-съезда, весовую платформу, установленную на основание через тензометрические датчики, подключенные к входам блока измерений, а также путевые датчики, соединенные с блоком измерений.
Весы вагонные в движении работают следующим образом: при движении вагона по весовой платформе блок измерений обрабатывает весоизмерительную информацию, поступающую от тензометрических датчиков в моменты времени, когда вагон находится на весовой платформе. Информация о положении осей тележек вагона поступает от путевых датчиков, таким образом производится определение скорости движения вагона и длительности времени нахождения вагона на весовой платформе, необходимого для измерения веса вагона.
Недостатком данных весов является наличие одной единой весовой платформы для взвешивания вагонов, а также множество путевых датчиков для определения положения осей тележек, с целью определения скорости движения вагона и длительности времени, необходимого для измерения веса вагона, что является недостаточной информационной базой для осуществления цифровой фильтрации и тем самым снижается точность измерения веса вагона в движении на скорости выше 5 км/ч.
Известны электронные весы (вагонные) (см. патент 4804052 США, МКИ G01G 19/40. Заявлен 30/11/87. Опубликован 12/02/89), содержащие весовую платформу, установленную на основание через тензометрические датчики (количество датчиков может достигать до 16), подключенные к входам блока измерений. Блок измерений содержит несколько устройств преобразователей, выполненных в виде отдельных электронных плат, содержащих аналого-измерительный преобразователь, мультиплексор и аналого-цифровой преобразователь. Выходные цифровые сигналы электронных плат поступают на центральный контроллер, содержащий микропроцессор, устройство памяти, цифровой индикатор и пульт ручного управления с клавиатурой.
Предлагаемое решение на основе применения блока измерений, содержащего устройства, выполненные в виде отдельных электронных плат, производящих преобразование аналоговых сигналов тензометрических датчиков в цифровой сигнал, и последующего суммирования (обработки) сигналов центральным контроллером позволяет производить нормирование характеристик тензометрических датчиков и взвешивание грузов.
Недостатком данных электронных весов является сложность реализации алгоритма обработки сигналов взвешивания в движении с помощью центрального контроллера, блока измерений, а также недостаточность информационной базы для осуществления цифровой фильтрации при взвешивании в движении и тем самым снижается точность измерения веса вагона в движении на скорости выше 5 км/ч.
Наиболее близкими по технической сущности являются вагонные весы (см. патент RU 2398696, G01G 19/04, 30/12/2008. Система для измерения и регистрации параметров вагонов поезда), содержащие узлы въезда-съезда, грузоприемную платформу тележки вагона установленную на основание через тензометрические датчики, подключенные к блоку измерений, выход которого соединен с первым входом блока динамического взвешивания, выход же блока динамического взвешивания соединен с первым входом автоматизированного рабочего места на основе ЭВМ, при этом устройство считывания бортового номера вагона (видеокамеры) подключено ко второму входу автоматизированного рабочего места, а регистратор подвижных единиц вагона подключен к третьему входу автоматизированного рабочего места.
Вагонные весы позволяют производить взвешивание вагонов в движении, при этом производится измерение в автоматическом режиме скорости каждого вагона, его учетной массы, за счет обработки весоизмерительной информации от тензометрических датчиков, кроме этого происходит регистрация бортового номера вагона (считыватель бортового номера), реквизитов вагона (считыватель метки вагона) и начала вагонного состава (регистратор подвижной единицы поезда).
Недостатком данных вагонных весов является наличие одной грузоприемной платформы для взвешивания тележки вагона и определение позиционирования оси тележки за счет обработки весоизмерительной информации с целью определения скорости движения вагона, что является недостаточной информационной базой для осуществления цифровой фильтрации и тем самым снижается точность измерения веса вагона в движении на скорости выше 5 км/ч.
Целью изобретения является повышение точности взвешивания в движении.
Цель достигается тем, что вагонные весы в движении и статике содержат узлы въезда-съезда, первое грузоприемное устройство тележек вагона, установленное на основании через тензометрические датчики, подключенные к первому, второму, третьему, четвертому входам первого блока измерения, выход которого соединен с первым входом блока динамического взвешивания, выход же блока динамического взвешивания соединен с первым входом автоматизированного рабочего места, при этом устройство считывания бортового номера вагона подключено ко второму входу автоматизированного рабочего места, а также введены второе грузоприемное устройство тележек вагона, второй, третий блоки измерений, первый, второй, третий, четвертый датчики определения оси тележки, сейсмический датчик, установленный на основании, при этом тензометрические датчики второго грузоприемного устройства тележек вагона подключены к первому, второму, третьему, четвертому входам второго блока измерения, выход же второго блока измерений соединен со вторым входом блока динамического взвешивания, а сейсмический датчик подключен к входу третьего блока измерения, выход которого соединен с третьим входом блока динамического взвешивания, первый, второй, третий, четвертый датчики определения оси тележки соединены соответственно с четвертым, пятым, шестым, седьмым входами блока динамического взвешивания.
Для доказательства соответствия предложенного технического решения критерию существенные отличия определим, в каких технических решениях имеются признаки сходные с предлагаемыми. Отличительными признаками предложенных вагонных весов в движении являются: второе грузоприемное устройство тележек вагона, второй, третий блоки измерений (см. http://www.itves.ru), (см. http://www.hbmwt.ru).
Применение второго грузоприемного устройства тележек вагона, второго блока измерений позволяет определить мгновенное значение веса тележки в цифровом виде, создавая дополнительную информационную базу данных в цифровом виде.
Наличие третьего блока измерений позволяет производить измерение амплитуды колебаний основания весов в цифровом виде, тем самым создавая дополнительную информационную базу для последующей адаптации колебаний.
Использование первого, второго, третьего и четвертого датчиков определения оси тележки, а также сейсмического датчика по прямому назначению (см. Виглеб Г. Датчики: Пер. с нем. - М.: Мир, 1989. - 196 с.) позволяет произвести точное определение положения оси тележки и определить спектр низкочастотных колебаний основания весов вагонных в движении.
Применение взаимосвязи и подключение тензометрических датчиков второго грузоприемного устройства тележек вагона к первому, второму, третьему, четвертому входам второго блока измерения, выход же второго блока измерений соединен со вторым входом блока динамического взвешивания, а выход сейсмического датчика подключен к входу третьего блока измерения, выход которого соединен с третьим входом блока динамического взвешивания, первый, второй, третий, четвертый датчики определения оси тележки соединены соответственно с четвертым, пятым, шестым, седьмым входами блока динамического взвешивания, позволяет производить расчет скорости движения вагона на скорости выше 5 км/ч и обработку весоизмерительной информации в цифровом формате с большим соотношением сигнал-шум. Кроме этого данные взаимосвязи позволяют производить обработку информации, если в качестве тензометрических датчиков будут использованы цифровые тензометрические датчики (см. http://www.hbmwt.ru), что расширяет функциональные возможности предложенного технического решения.
Наличие таких новых свойств позволяет сделать вывод о том, что предложенное техническое решение обладает существенными отличиями.
В качестве блока динамического взвешивания может быть использован программируемый логический контроллер типа АДАМ10М, а блок измерений (см. http://www.hbmwt.ru).
Для обработки колебаний основания вагонных весов может быть использован сейсмический датчик типа ВС 1311-V.
Выходы блоков измерения, а также выход блока динамического взвешивания реализованы по интерфейсу типа RS 232. Четвертый, пятый, шестой и седьмой входы программируемого логического контроллера являются цифровыми входами.
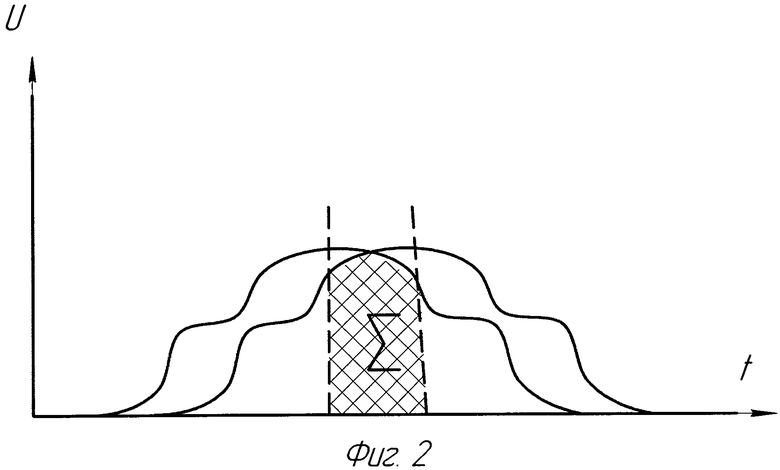
На фиг.1 показана структурная схема вагонных весов в движении, на фиг.2 - схема обработки цифровых сигналов.
Вагонные весы в движении фиг.1 содержат узлы въезда-съезда 1, 2, 3, первое грузоприемное устройство тележек вагона 4, установленное на основании 5, через тензометрические датчики 6, 7, 8, 9, подключенные к первому, второму, третьему, четвертому входам первого блока измерения 10, выход которого соединен с первым входом блока динамического взвешивания 11, выход же блока динамического взвешивания 11 соединен с первым входом автоматизированного рабочего места 12, при этом устройство считывания бортового номера вагона 13 подключено ко второму входу автоматизированного рабочего места 12, а также второе грузоприемное устройство тележек вагона 14, второй блок измерения 15, третий блок измерения 16, первый 17, второй 18, третий 19, четвертый 20 датчики определения оси тележки, сейсмический датчик 2, установленный на основании 5 вагонных весов, при этом тензометрические датчики 22, 23, 24, 25 второго грузоприемного устройства тележек вагона 14 подключены к первому, второму, третьему, четвертому входам второго блока измерения 15, а выход второго блока измерения 15 соединен свторым входом блока динамического взвешивания 11, сейсмический датчик 21 подключен к входу третьего блока измерений 16, выход которого соединен с третьим входом блока динамического взвешивания 11, первый 17, второй 18, третий 19, четвертый 20 определения оси тележки вагона подключены соответственно к четвертому, пятому, шестому, седьмому входам блока динамического взвешивания 11, при этом на первое 4, второе 14 грузоприемные устройства тележек вагона устанавливается сам железнодорожный вагон 26.
Схема обработки цифровых сигналов во времени при расположении первой тележки вагона на первом грузоприемном устройстве тележек вагона 4 (платформа 1) и второй тележки вагона на втором грузоприемном устройстве тележек вагона 14 (платформа 2) с последующим суммированием цифровых сигналов отображена на фиг.2.
Вагонные весы работают следующим образом. В исходном положении при отсутствии тележек вагона 26 на первом 4 и втором 14 грузоприемных устройствах тележек вагона, первое и второе грузоприемные устройства тележек вагона 4, 14 подгружают тензометрические датчики 6, 7, 8, 9 и 22, 23, 24, 25 (исходный нуль). Сейсмический датчик 21 воспринимает колебания основания 5. Первый, второй и третий блоки измерений 10, 15, 16 обрабатывают поступившие аналоговые сигналы от тензометрических датчиков 6, 7, 8, 9, 22, 23, 24, 25, а также от сейсмического датчика 21 предварительно усиливая, фильтруя и оцифровывая полученные сигналы. Далее полученные «исходные нули» в цифровом виде через интерфейс типа RS 232 поступают на первый, второй и третий входы блока динамического взвешивания 11. Датчики определения оси тележки 17, 18, 19, 20 подают сигнал (нуль) отсутствия оси тележки вагона в зоне срабатывания датчиков на 4, 5, 6, 7 входы блока динамического взвешивания 11. В соответствии с программой и алгоритмом обработки весоизмерительной информации, блок динамического взвешивания 11 через интерфейс типа RS 232 передает цифровое значение нуля на первый вход блока автоматизированного рабочего места 12 (персональный компьютер). Полученные значения обработанной весоизмерительной информации и информации от устройства считывания бортового номера вагона 13 фиксируются в базе данных автоматизированного рабочего места 12 в утвержденной табличной форме.
При движении вагона 26 железнодорожного поезда через узел въезда-съезда I по первому грузоприемному устройству тележек вагона 4 и в дальнейшем через узел въезда-съезда 3 по второму грузоприемному устройству тележек вагона 14 происходит определение положения осей тележек вагона во времени с помощью датчиков определения оси тележки 17, 18, 19, 20, тем самым определяется скорость движения вагона 26. Одновременно происходит фиксация нагрузки (вес) на ось тележки и определение частоты и амплитуды колебания основания 5. В соответствии с фиг.2, происходит суммирование максимальных значений веса первого, второго грузоприемных устройств тележек вагона 4, 14 за вычисленный интервал времени t2-t1 по соответствующему алгоритму и программе с учетом значений колебания основания 1 блоком динамического взвешивания 11. При этом первый, второй, третий блоки измерения 10, 15, 16 производят усиление, предварительную фильтрацию полученных аналоговых сигналов и аналого-цифровое преобразование.
В последующем полученные весовые значения поступают по интерфейсу типа RS 232 на первый вход автоматизированного рабочего места 12, где фиксируются в соответствующей базе данных. Номер вагона так же фиксируется устройством считывания бортового номера вагона 13 и регистрируется по второму входу автоматизированного рабочего места 12 в базе данных.
Таким образом, происходит взвешивание веса вагонов в движении, с учетом адаптивной составляющей колебания основания весов при различных скоростях движения.
Данные весы позволяют производить взвешивание веса вагонов и в статике.
По сравнению с прототипом вагонные весы обладают повышенной точностью при взвешивании в движении за счет использования второго грузоприемного устройства тележек вагона 14, второго, третьего блоков измерения 15, 16, первого 17, второго 18, третьего 19, четвертого 20 датчиков определения оси тележки и сейсмического датчика 21, установленного на основании 5 вагонных весов.
На дату подачи патента разработаны и опробованы опытные образцы вагонных весов.
Используемая литература
1. Гроссман Н.Я., Шнырев Г.Д. Автоматизированные системы взвешивания и дозирования. - М.: Машиностроение. 1988. - 292 с.
2. Электронные весы (вагонные). Патент №4804052 США, G01G 19/40 от 30.11.87.
3. Вагонные весы. Патент RU 2398696, G01G 19/04 от 30.12.2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЕ ВЕСЫ | 2012 |
|
RU2517793C2 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для взвешивания движущихся железнодорожных составов | 1982 |
|
SU1089427A1 |
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1983 |
|
SU1078256A1 |
| Автоматизированный пост динамического взвешивания железнодорожных составов (АПДВ) | 2023 |
|
RU2828636C1 |
| Способ поосного взвешивания объектов железнодорожного состава в движении | 1987 |
|
SU1425465A1 |
| МНОГОДИАПАЗОННЫЕ ЭЛЕКТРОННЫЕ ВЕСЫ | 1997 |
|
RU2133945C1 |
| ВАГОННЫЕ ВЕСЫ | 2002 |
|
RU2239800C2 |
Предлагаемое изобретение относится к весоизмерительной технике, в частности к вагонным весам. Техническим результатом изобретения является повышение точности взвешивания при движении вагонных весов. Вагонные весы содержат узлы въезда-съезда, первое грузоприемное устройство тележек вагона, основание, тензометрические датчики, первый блок измерения, блок динамического взвешивания, автоматизированное рабочее место, устройство считывания бортового номера вагона. Также вагонные весы содержат второе грузоприемное устройство тележек вагона, второй и третий блоки измерений, первый, второй, третий, четвертый датчики определения оси тележки, сейсмический датчик, тензометрические датчики, вагон. 2 ил.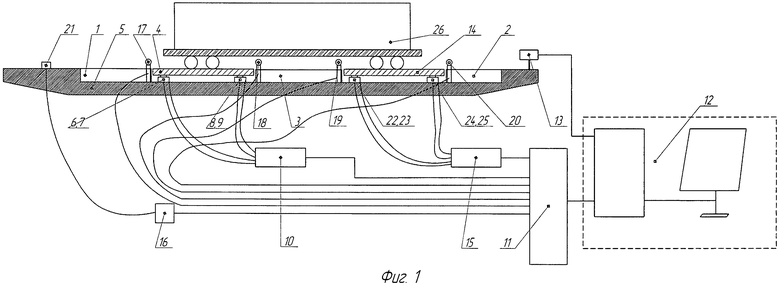
Вагонные весы в движении и статике, содержащие узлы въезда-съезда, первое грузоприемное устройство тележек вагона, установленное на основании через тензометрические датчики, подключенные к первому, второму, третьему, четвертому входам первого блока измерения, выход которого соединен с первым входом блока динамического взвешивания, выход же блока динамического взвешивания соединен с первым входом автоматизированного рабочего места, при этом устройство считывания бортового номера вагона подключено ко второму входу автоматизированного рабочего места, отличающиеся тем, что в них введены второе грузоприемное устройство тележек вагона, второй, третий блоки измерений, первый, второй, третий, четвертый датчики определения оси тележки, сейсмический датчик, установленный на основании, при этом тензометрические датчики второго грузоприемного устройства тележек вагона подключены к первому, второму, третьему, четвертому входам второго блока измерения, выход же второго блока измерений соединен со вторым входом блока динамического взвешивания, а сейсмический датчик подключен к входу третьего блока измерения, выход которого соединен с третьим входом блока динамического взвешивания, первый, второй, третий, четвертый датчики определения оси тележки соединены соответственно с четвертым, пятым, шестым, седьмым входами блока динамического взвешивания.
| СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ ПАРАМЕТРОВ ВАГОНОВ ПОЕЗДА | 2008 |
|
RU2398696C1 |
| ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ В ДВИЖЕНИИ И СТАТИКЕ С ПРИМЕНЕНИЕМ РЕЛЬСОВОЙ ПОДКЛАДКИ | 2008 |
|
RU2376560C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕСА И ДИАГНОСТИКИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА ПОД ПОДОШВОЙ РЕЛЬСА С ПРИМЕНЕНИЕМ ВЕСОВОЙ РЕЛЬСОВОЙ ПОДКЛАДКИ | 2008 |
|
RU2376559C1 |
| WO 2010093895 А1, 19.08.2010 | |||

