Лдин(ение
-ее
.1Q
.20
ии
ю ел
.4
СЛ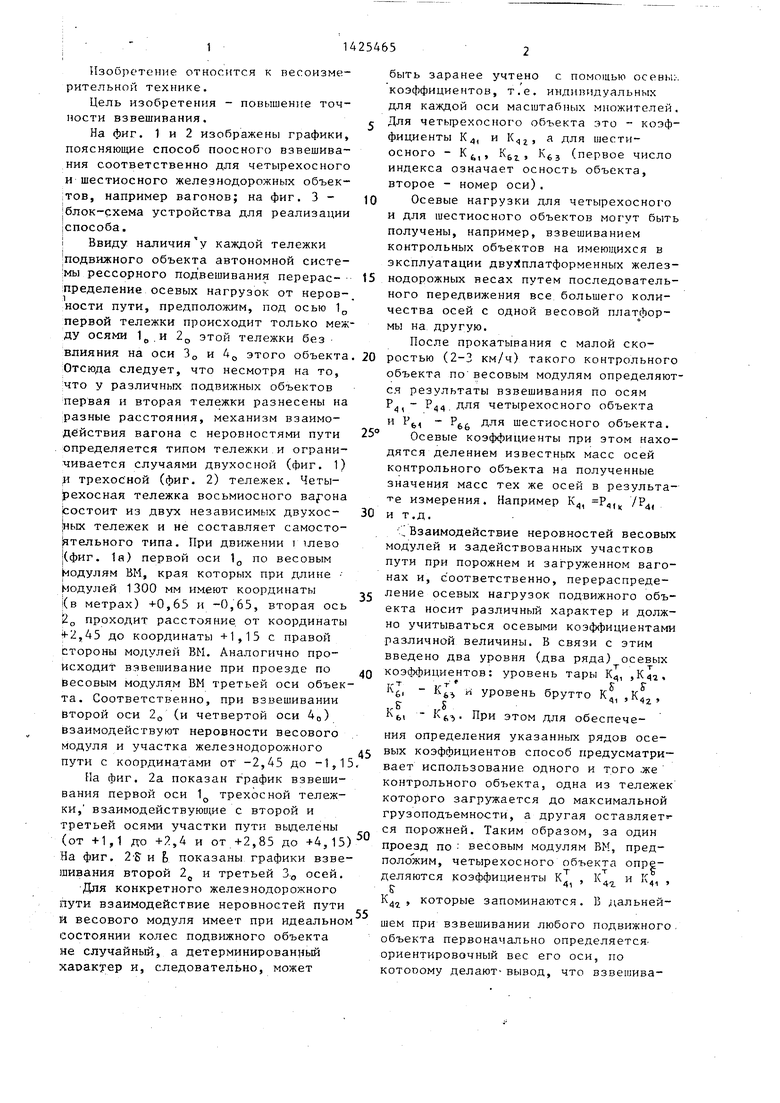

-2,5
-7,Г5
У/7уУ7/7// /.
Фиг. J
Изобретение относится к весоизмерительной технике.
Цель изобретения - повышение точности взвешивания.
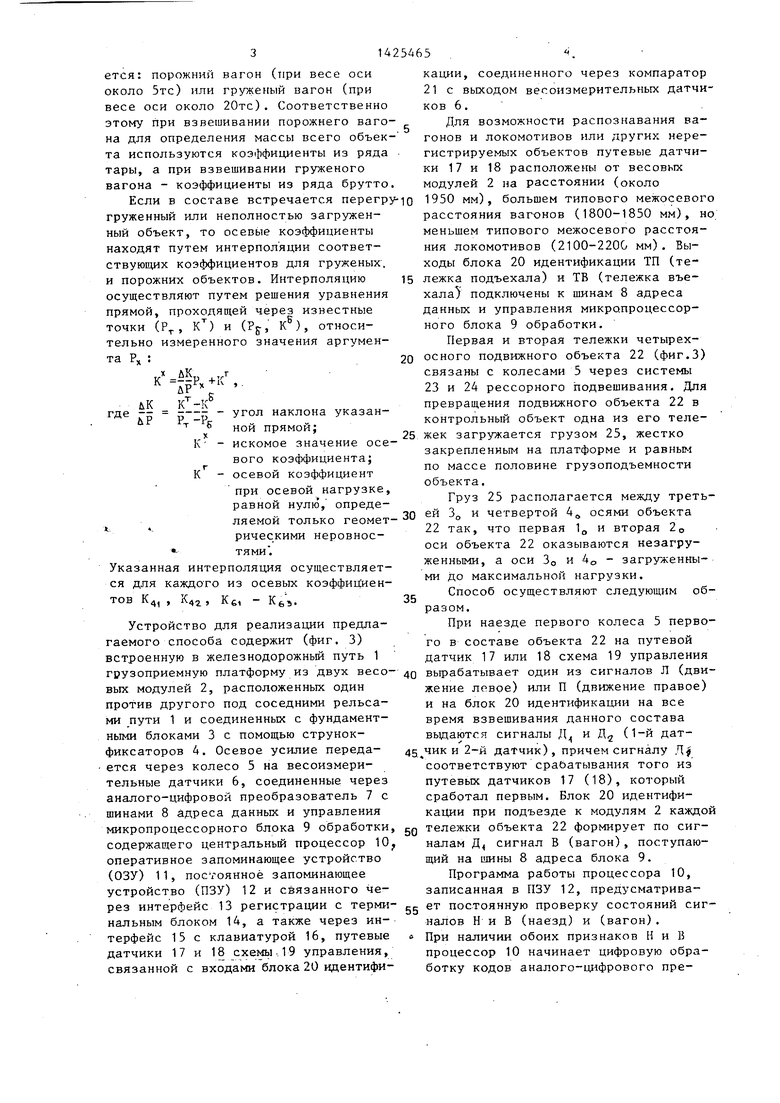
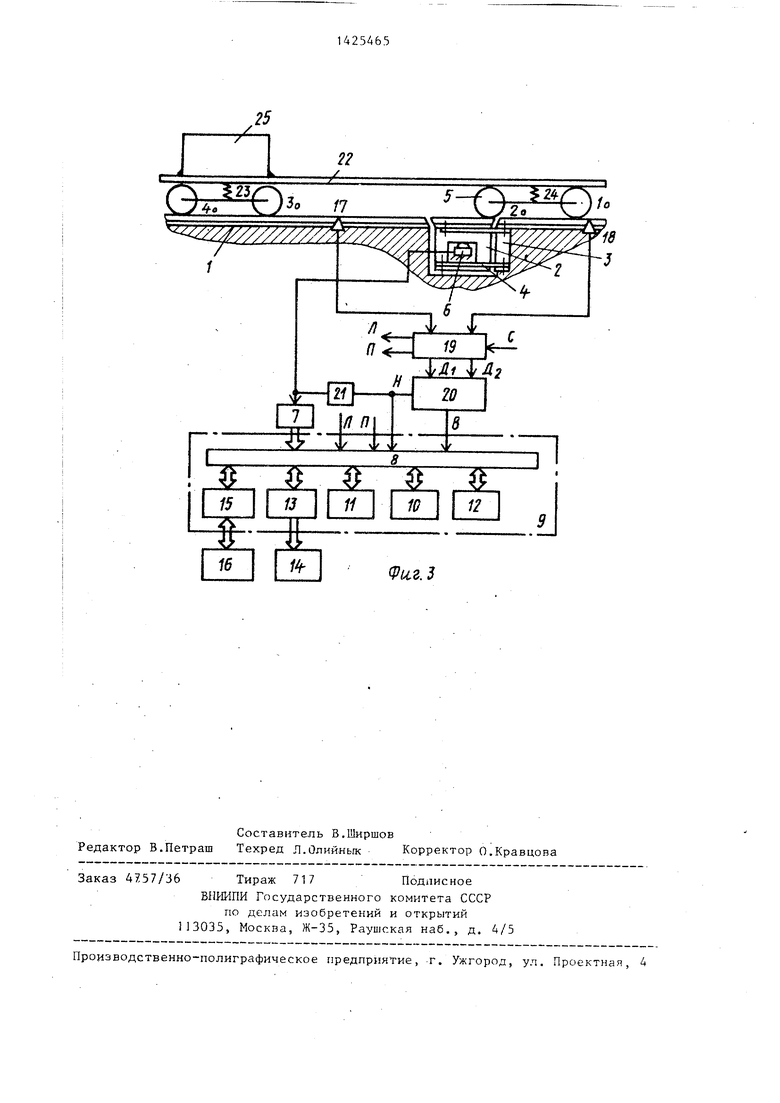
На фиг. 1 и 2 изображены графики, поясняющие способ поосного взвешивания соответственно для четырехосного и шестиосного железнодорожных объек- :тов, например вагонов; на фиг. 3 - |блок-схема устройства для реализации |способа.
i Ввиду наличия у каждой тележки подвижного объекта автономной систе- ;мы рессорного под вешивания перерас- :пределение осевых нагрузок от неровности пути, предположим, под осью 1, первой тележки происходит только между осями IO.H 2(, этой тележки без
и 4 этого объекта.
влияния на оси Зо Отсюда следует, что несмотря на то, что у различных подвижных объектов первая и вторая тележки разнесены на разные расстояния, механизм взаимодействия вагона с неровностями пути определяется типом тележки и ограничивается случаями двухосной (фиг. 1) И трехос ной (фиг. 2) тележек. Четы- |)ехосная тележка восьмиосного вагона состоит из двух независимых двухос- Мык тележек и не составляет самосто- тельного типа. При движении i тлево |(фиг. 1а) первой оси 1 по весовым Иодулям ВМ, края которых при длине Нодулей 1300 мм имеют координаты |(в метрах) +0,65 и -0,65, вторая ось |2о проходит расстояние, от координаты ,45 до координаты +1,15 с правой стороны модулей ВМ. Аналогично происходит взвешивание при проезде по Весовым модулям ВМ третьей оси объекта. Соответственно, при взвешивании второй оси 2о (и четвертой оси АО). взаимодействуют неровности весового модуля и участка железнодорожного пути с координатами от -2,45 до -1,15
На фиг. 2а показан график взвешивания первой оси IQ трехосной тележки, взаимодействующие с второй и третьей осями участки пути выделены (от +1,1 до +2,4 и от +2,85 до +4,15) На фиг. 2 & и Ь показаны графики взвешивания второй 2д и третьей З-,, осей.
Для конкретного железнодорожного пути взаимодействие неровностей пути и весового модуля имеет при идеальном состоянии колес подвижного объекта не случайный, а детерминированный характер и, следовательно, может
0
5
0
5
5 0
0
быть заранее учтено с помощью осевы:-. коэффициентов, т.е. индивидуальных для каждой оси масштабных множителей. Для четырехосного объекта это - коэффициенты К, и К,, а для шестиосного Kj,,, Кб2, J (первое число индекса означает осность объекта, второе - номер оси),
Осевые нагрузки для четырехосног о и для шестиосного объектов могут быть получены, например, взвешиванием контрольных объектов на имеющихся в эксплуатации двуХплатформенных железнодорожных весах путем последовательного передвижения все большего количества осей с одной весовой платформы на, другую.
После прокатывания с малой скоростью (2-3 км/ч) такого контрольного объекта по весовым модулям определяются результаты взвешивания по осям Р,- Р.Для четырехосного объекта
и l - Р для щестиосного объекта.
Осевые коэффициенты при этом находятся делением известных масс осей контрольного объекта на полученные значения масс тех же осей в результате измерения. Например К, Рч(к /Р4( и т.д.
, Взаимодействие неровностей весовых модулей и задействованных участков пути при порожнем и загруженном вагонах и, соответственно, перераспределение осевых нагрузок подвижного объекта носит различный характер и должно учитываться осевыми коэффициентами различной величины. В связи с этим введено два уровня (два ряда) осевых коэффициентов: уровень тары К,, зКц,
Ч. К.. и уровень брутто К, ,К.,
К
При этом для обеспече
ния определения указанных рядов осевых коэффициентов способ предусматривает использование одного и того .же контрольного объекта, одна из тележек которого загружается до максимальной грузоподъемности, а другая оставляет - ся порожней. Таким образом, за один проезд по . весовым модулям ВН, пред- поло жим, четырехосного объекта onpg- деляются коэффициенты Kj
К и
К
4г
которые запоминаются. Б дальнейшем при взвешивании любого подвижного объекта первоначально определяется ориентировочный вес его оси, по котооому делают- вывод, что взвешива314
ется: порожнш вагон (при весе оси около 5тс) или груженый вагон (при весе оси около 20тс). Соответственно этому при взвешивании порожнего вагона для определения массы всего объекта используются коэффициенты из ряда
тары, а при взвешивании груженого вагона - коэффициенты из ряда брутто.
груженный или неполностью загруженный объект, то осевые коэффициенты находят путем интерполяции соответствующих коэффициентов для груженых. и порожних объектов. Интерполяцию осуществляют путем рещения уравнения прямой, проходяп1ей через известные точки (РТ , К) и (Pj-, К ), относительно измеренного значения аргумента Р. :
ЛК
+Y К -дрРх к
.т „Ь
20
где -Если в составе встречается перегру-ю 1950 мм), большем типового межосевого
расстояния вагонов (1800-1850 мм), но меньшем типового межосевого расстояния локомотивов (2100-2200 мм). Выходы блока 20 идентификации ТП (те- 15 лежка подъехала) и ТВ (тележка въехала} подключены к шинам 8 адреса данных и управления микропроцессорного блока 9 обработки.
Первая и вторая тележки четырехосного подвижного объекта 22 (фиг.З) связаны с колесами 5 через системы 23 и 24 рессорного подвешивания. Для превращения подвижного объекта 22 в контрольный объект одна из его теле 25 жек загружается грузом 25, жестко закрепленным на платформе и равным по массе половине грузоподъемности объекта.
Груз 25 располагается между треть 30 бй Зд и четвертой 4 осями объекта 22 так, что первая „ и вторая 2о оси объекта 22 оказываются незагруженными, а оси Зо и 4о - загруженными до максимальной нагрузки.
Способ осуществляют следующим образом.
При наезде первого колеса 5 первого в составе объекта 22 на путевой датчик 17 или 18 схема 19 управления
угол наклона указанной прямой; К - искомое значение осе
вого коэффициента; К - осевой коэффициент
при осевой нагрузке, равной нулю, определяемой только геомет рическими неровнос- тями .
Указанная интерполяция осуществляется для каждото из осевых коэффиойентов К
41
к
4г 5
к
С1
- К
35
Устройство для реализации предлагаемого способа содержит (фиг. 3) встроенную в железнодорожньм путь 1
грузоприемную платформу из двух весо- 40 вырабатывает один из сигналов Л (двивых модулей 2, расположенных один против другого под соседними рельсами пути 1 и соединенных с фундаментными блоками 3 с помощью струнок- фиксаторов 4. Осевое усилие передается через колесо 5 на весоизмерительные датчики 6, соединенные через аналого-цифровой преобразователь 7 с шинами 8 адреса данных и управления микропроцессорного блока 9 обработки, содержащего центральный процессор 10 оперативное запоминающее устройство (ОЗУ) 11, постоянное запоминающее устройство (ПЗУ) 12 и связанного через интерфейс 13 регистрации с терми- gg ет постоянную проверку состояний сигнальным блоком 14, а также через ин- налов Ни В (наезд) и (вагон), терфейс 15 с клавиатурой 16, путевые датчики 17 и 18 схемь -. 19 управления.
При наличии обоих признаков Н и В процессор 10 начинает цифровую обработку кодов аналого-цифрового пресвязанной с входами блока 20 идентифи
нации, соединенного через компаратор 21 с выходом весоизмерительных датчиков 6.
Для возможности распознавания вагонов и локомотивов или других нерегистрируемых объектов путевые датчики 17 и 18 расположены от весовых модулей 2 на расстоянии (около
20
35
жение левое) или И (движение правое) и на блок 20 идентификации на все время взвешивания данного состава выдаются сигналы Д и Д (1-й дат45,чик и 2-й датчик), причем сигналу Д соответствуют срабатывания того из путевых датчиков 17 (18), который сработал первым. Блок 20 идентификации при подъезде к модулям 2 каждой
50 тележки объекта 22 формирует по сигналам Д сигнал В (вагон), поступающий на шины 8 адреса блока 9.
Программа работы процессора 10, записанная в ПЗУ 12, предусматривает постоянную проверку состояний сигналов Ни В (наезд) и (вагон),
При наличии обоих признаков Н и В процессор 10 начинает цифровую обработку кодов аналого-цифрового прелов весоизмерительных датчиков 6. В результате такой обработки по одному из известных алгоритмов получают интегралы, представляющие результаты для всех осей объекта 22.
Для получения указанных интеграло требуется, чтобы обрабатывались сигналы датчиков 6 в течение всего вре- :мени проезда по модулям 2 той или i иной оси объекта 22, так как только :такая обработка полностью устраняет влияние неровностей пути и различие результатов при изменении направления движения,
Перед началом работы по взвешиванию объектов 22 с клавиатуры 16 в ОЗУ 11 вводятся значения масс осей
контрольных объектов: Р,
-IIK
- Pd
-Ц4|с Дчетьфехосного, и Ь бс к шестиосного контрольного объекта, причем одна из тележек каж,п,ого контрольного объекта оставлена порожней, а другая загружена до максимальной грузоподъемности.
Далее на клавиатуре 16 набирается ;код теста Динамическое масштабирова- |ние и начинается прокатывание конт- |рольных объектов по модулям 2. Тест ; Динамическое масштабирование преду- 1сматривает определение указанным об- 1разом интервалов Р - четы- jpaxocHoro объекта и Pj,, - Pf.g для Ьестиосного объекта и подсчет осевых 5 оэффициентов.
: После каждого прокатывания контрольного объекта вычисленные осевые |коэффициенты вводятся на табло терминального блока 14 и записываются оператором. После нескольких прокатываний значения коэффициентов анализируются на сходимость, производится при необходимости их усреднение, после чего принятые окончательно значения осевых коэффициентов с клавиатур1 1 16 вводятся в ОЗУ 11 для постоянного употребления.
Взвешивание подвижных объектов осуществляется следующим образом.
Сформированное схемой 19 направление движения определяет порядок выемки из ОЗУ 11 осевых коэффициентов, например, прямой порядок при левом движении (К4, , Ki,.,. K, - Kg,} или обратньш при правом движении
(К
17
Д- умножения интегралов, получаемых в результате
мерительных датчиков 6.
Блок 20 идентификации выдает сигнал В за время взвешивания подвижного объекта 22 дважды, так как этот сигнал формируется при подъезде каждой тележки объекта 22 к модулям 2 и погашается при въезде последней оси
тележки на модуль 2.
Таким образом, процессор 10 подсчетом числа наездов Н за время существования первого по счету для данного объекта 22 сигнала В определяет осность объекта 22. Осность может быть определена только к моменту въезда на модули 2 последней оси первой тележки объекта 22. Ранее, например, по интегралу, полученному при
взвешивании первой оси, процессор 10 оценивает, что собственно взвещива- ется: тара или брутто и какой ряд осевых коэффициентов следует извлекать из ОЗУ 11 для умножения.
, Следовательно, к моменту проезда первой тележки объекта 22 имееется вся необходимая информация для определения блоком 9 массы первой тележ- ки. Пусть, например, при левом направлении движения проехала двухосная тележка, оцениваемая как порожняя по полученным интегралам первой и второй оси Р и Р42 . Тогда масса первой тележки равна
К.
+Р4г- К,.,
0
41 Ml
При правом направлении движения масса первой тележки груженого щестиос- ного объекта 22 определяется так: .S . S
б1
К„+РбгК -г+Рб,
К
61
где
PS,Pjj - полученные интегралы.
левом проезде теПри, например,.
лежки восьмиосного объекта 22, оцененной по интегралам Pg - Pg как порожняя, масса тележки определяется так:
0
К4, +Р8.
К.
81 Ml 82 в. 41 84 Мг
так как тележка восьмиосного объекта 22 состоит из двух независимых тележек .
При оценке процессором 10 осевой 5 нагрузки может выясниться, что ось перегружена или недогружена, для чего в ПЗУ 12 заранее записаны оценочные критерии, например необходимость определения значений осевых
7:
коэффициентов при осевых нагрузках 5,5 - 19,5 тс и свьпие 20,5 тс. В эт случае процессор 10 производит решение для всех используемых осевых коэффиднентов уравнения
К
рр.«
путем подстановки в него найденного значения . Определенное значение
X
К используется для расчетов по приведенным формулам массы тележки данного конкретного объекта.
Определение массы второй тележки любого объекта 22 не отличается от описанного вьше, за исключением тоЛЬитение
0
5
8
го, что не требуется проводить контроль осности тележки.
После проезда через модули 2 последней оси каждоно объекта 22 массы его тележек суммируются процессором 10, контролирующим четность сигналов В и после каждого четного сигнала В передающим сумму в терминальный блок 14 для регистрации.
1окомотивы и иные объекты, не обладающие идентификационными призна1ка- ми, не влияют на процесс взвешивания и могут находиться в составе в любом количестве и последовательности.
.20
30
| Способ динамического взвешивания | 1983 |
|
SU1177683A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Способ поосного взвешивания железнодорожного состава в движении | 1985 |
|
SU1278604A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
