Изобретение относится к гексаподной платформе и силовому цилиндру, который может быть использован в гексаподной платформе.
Гексаподные платформы, которые также известны как платформы Гью-Стюарта, используются для наиболее точного расположения объектов в космосе. Они содержат закрепленное основание и верхнюю платформу, которая может перемещаться относительно основания. Верхняя платформа может перемещаться по шести степеням свободы относительно основания, к которому прикреплен объект, местоположением и ориентацией в пространстве которого требуется управлять. Такой тип платформ имеет различные применения. Такие платформы, например, могут быть обеспечены для размещения механической детали, которая должна быть обработана, для размещения параболических антенн или телескопов, для летного тренажера, или, альтернативно, для проведения испытаний по работе оборудования.
Гексаподная платформа, в общем, содержит шесть опор регулируемой длины, соединяющих перемещающуюся верхнюю платформу с основанием. Опоры соединены парами с перемещающейся верхней платформой и основанием. Пары чередуются так, что две опоры одной пары, соединенные с перемещающейся верхней платформой, принадлежат двум различным парам, соединенным с основанием. В известных гексаподных платформах каждая опора содержит прямой силовой цилиндр, сочлененный на каждом из его концов с основанием и перемещающейся верхней платформой посредством шарового шарнира с тремя степенями свободы последовательно. Скоординированное регулирование длины каждой из шести опор позволяет перемещающейся верхней платформе быть перемещенной по шести степеням свободы.
Во время перемещений перемещающейся верхней платформы силовые цилиндры вынуждены поворачиваться вокруг шаровых шарниров, которые соединяют их с основанием. Силовые цилиндры могут быть гидравлическими или электрическими силовыми цилиндрами. Они, в общем, несколько тяжеловесны и несут свою собственную встроенную систему привода. Перемещение силовых цилиндров обуславливается значительной долей полной инерции платформы. Эта инерция отрицательно влияет на очень быстрые перемещения такой платформы.
Задачей изобретения является уменьшение инерции гексаподной платформы, чтобы облегчить перемещающейся верхней платформе очень быстрые и широкоамплитудные перемещения.
В связи с этим целью изобретения является силовой цилиндр, который может быть использован в гексаподной платформе, причем силовой цилиндр содержит корпус, поршень, выполненный с возможностью поступательного перемещения относительно корпуса, и шток, соединенный с поршнем, чтобы следовать его поступательному перемещению, и посредством которого силовой цилиндр прикладывает нагрузку, отличающийся тем, что шток соединен с поршнем посредством шарового шарнира.
Другой задачей изобретения является гексаподная платформа, содержащая шесть силовых цилиндров согласно изобретению, причем платформа содержит основание и перемещающуюся верхнюю платформу, отличающаяся тем, что шесть силовых цилиндров прикреплены на основании посредством их корпусов и соединены с перемещающейся верхней платформой посредством их второго шарового шарнира.
Из подробного описания одного варианта осуществления, приведенного посредством примера, изобретение будет более понятным, и станут очевидными другие преимущества, причем описание поясняется приложенными чертежами, на которых:
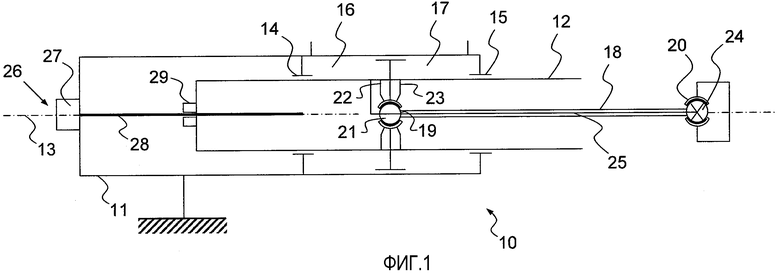
Фиг.1 схематично изображает силовой цилиндр согласно изобретению;
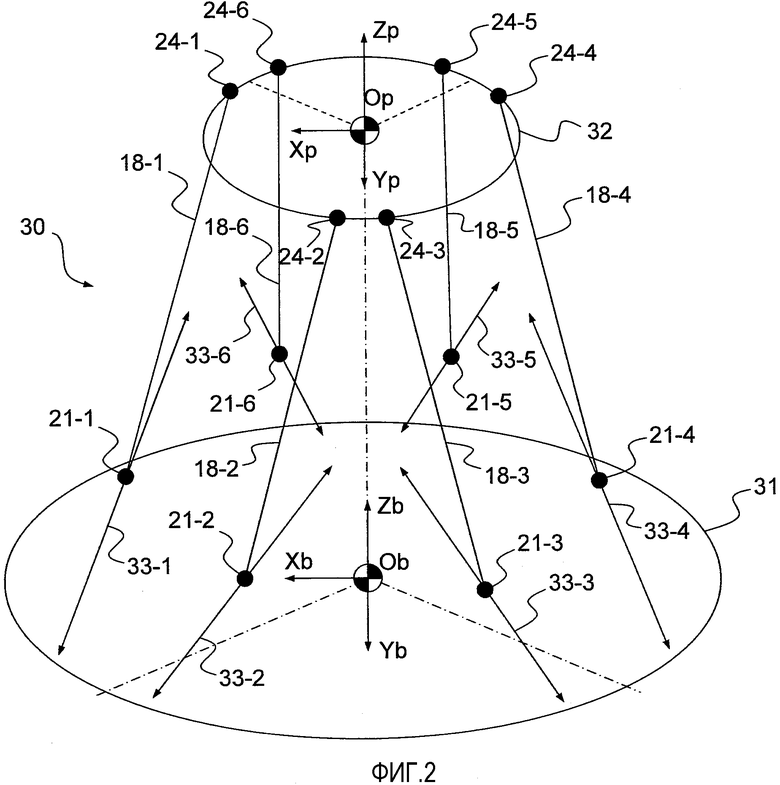
Фиг.2 изображает кинематическую схему гексаподной платформы согласно изобретению;
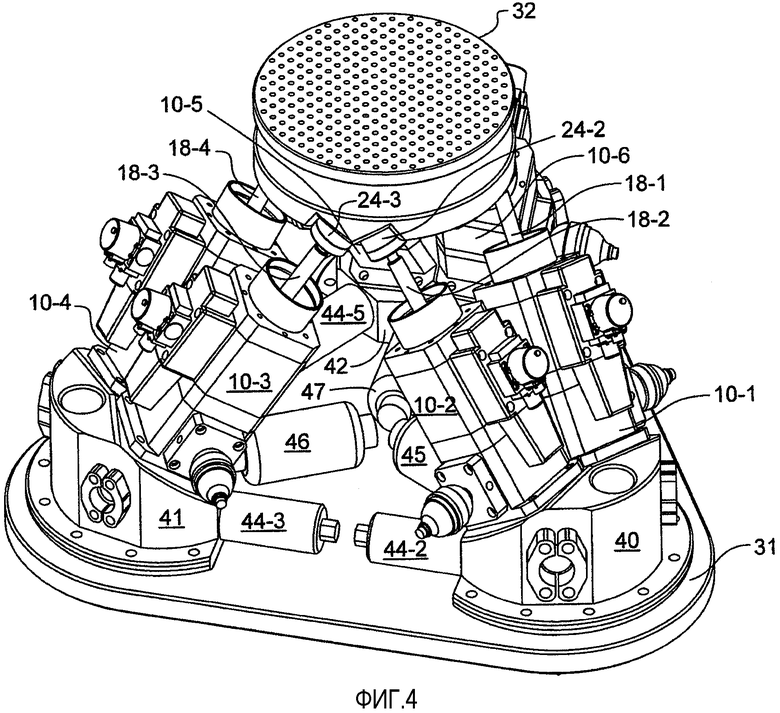
Фиг.3 изображает один пример варианта осуществления силового цилиндра, схематично изображенного на фиг.1;
Фиг.4 изображает один образец варианта осуществления гексаподной платформы, схематично изображенной на фиг.2.
Для ясности на различных чертежах одинаковые элементы имеют одинаковые ссылочные позиции.
Фиг.1 изображает линейный силовой цилиндр 10, содержащий корпус 11 и поршень 12, выполненные с возможностью поступательного перемещения относительно корпуса 11 вдоль продольной оси 13. Поршень 12 при поступательном перемещении направляется посредством двух опорно-направляющих колец 14 и 15, принадлежащих корпусу 11. В изображенном примере силовой цилиндр представляет собой гидравлический цилиндр, но, конечно, изобретение может быть осуществлено посредством других способов приведения в действие силового цилиндра, таким как в случае электрического или пневматического цилиндра, например. Силовой цилиндр 10 является цилиндром двойного действия и содержит две камеры 16 и 17, образованные в корпусе 11 и разделенные поршнем 12. Две камеры 16 и 17 снабжены гидравлической текучей средой, находящейся под давлением. Разность давлений гидравлической текучей среды между двумя камерами 16 и 17 позволяет поршню осуществить поступательное перемещение вдоль оси 13. Также возможно использовать изобретение с силовым цилиндром однократного действия, в котором только одна камера снабжается гидравлической текучей средой. Другая камера может быть заменена пружиной, что позволит поршню 12 возвращаться к положению, которое получено, когда давление гидравлической текучей среды равно нулю.
Силовой цилиндр 10 содержит шток 18, посредством которого силовой цилиндр прикладывает нагрузку. Точнее шток 18 содержит два конца 19 и 20. Конец 19 соединен с поршнем 12 и конец 20 нажимает на внешний элемент, к которому приложена нагрузка, произведенная силовым цилиндром 10. В силовых цилиндрах предшествующего уровня техники шток 18 прикреплен к поршню 12 на конце 19. Согласно изобретению шток 18 соединен с поршнем посредством шарового шарнира 21, расположенного на конце 19. Это соединение позволяет штоку 18 угловые перемещения относительно оси 13.
При использовании гидравлического силового цилиндра шаровой шарнир 21 может преимущественно быть гидростатическим и снабжаться текучей средой посредством спуска части жидкости, обычно управляющей силовым цилиндром 10. Спуск может быть осуществлен посредством одного или более каналов 22 и 23, причем каждый из них соединяет камеры 16 и 17 и шаровой шарнир 21. В результате этого давление текучей среды в шаровом шарнире 21 зависит от давления текучей среды в камерах 16 и 17. Таким образом, чем более нагружен силовой цилиндр, тем больше давление в по меньшей мере одной из камер 16 или 17, и тем больше гидростатическая пленка, созданная в шаровом шарнире 21.
Силовой цилиндр 10 может содержать второй шаровой шарнир 24, расположенный на втором конце 20 штока 18. Этот второй шаровой шарнир 24 позволяет объекту быть соединенным с силовым цилиндром 10. Нагрузка, приложенная силовым цилиндром 10, проходит через первый шаровой шарнир 21, шток 18 и второй шаровой шарнир 24. Преимущественно второй шаровой шарнир 24 является аналогично гидростатическим и снабжается текучей средой посредством спуска части текучей среды, используемой для функционирования силового цилиндра 10. Спуск может быть осуществлен посредством канала 25, расположенного в штоке 18 и соединяющего два шаровых шарнира 21 и 24.
Силовой цилиндр может содержать датчик 26, который определяет положение поршня 12 относительно корпуса 11 при его поступательном перемещении вдоль оси 13. Датчик 26, например, может быть магнитострикционного типа. Он содержит корпус 27, прикрепленный к корпусу 11 и выполненный с возможностью испускать ультразвуковую волну вдоль ферромагнитного стержня 28. Магнит 29, прикрепленный к поршню 12, скользит вдоль стержня 29 в то время, когда поршень 12 перемещается и меняет ультразвуковую волну. Измерение в корпусе 27 этой волны позволяет определить положение поршня 12.
Фиг.2 изображает кинематическую схему гексаподной платформы 30, содержащей основание 31, перемещающуюся верхнюю платформу 32 и шесть силовых цилиндров 10, как описанные со ссылкой на фиг.1. Корпус 11 каждого силового цилиндра 10 прикреплен к основанию 31, и направления поступательного перемещения поршней 12 изображены шестью двунаправленными стрелками с 33-1 по 33-6. Поскольку корпусы 11 прикреплены к основанию 31, направления с 33-1 по 33-6 закреплены в пространстве в системе отсчета, связанной с основанием 31. Шесть штоков 18 и их шаровые шарниры 21 и 24 имеют ссылочные позиции с прибавленной цифрой, которые соответствуют направлениям: с 18-1 по 18-6 для стержней, с 21-1 по 21-6 для первых шаровых шарниров и с 24-1 по 24-6 для вторых шаровых шарниров.
Фиг.3 изображает один пример варианта осуществления силового цилиндра 10. Этот чертеж снова изображает поршень 12, который выполнен с возможностью поступательного перемещения вдоль оси 13 корпуса 11, штока 18, концы которого имеют шаровые шарниры 21 и 24, и части перемещающейся верхней платформы 32. Фиг.3 изображает гидравлический управляющий элемент 35 для управления силовым цилиндром 10. Элемент 35 содержит, например, сервоклапан, позволяющий подачу текучей среды в две камеры 16 и 17.
В предшествующем уровне техники, в котором корпус силового цилиндра выполнен с возможностью перемещения во время перемещений перемещающейся верхней платформы, предпочтительно, чтобы управляющий элемент был прикреплен к основанию, а не к корпусу силового цилиндра. Это необходимо для ограничения инерции корпуса с помощью силового цилиндра. Из-за возможности относительного перемещения элемента управления относительно корпуса силового цилиндра должны быть использованы гибкие шланги для снабжения камер силового цилиндра гидравлической текучей средой посредством элемента управления. Прикрепление корпуса 11 силового цилиндра 10 к основанию 31 значит, что между элементом 35 и корпусом 11 может быть вставлен жесткий трубопровод.
Преимущественно гидравлический управляющий элемент 35 силового цилиндра 10 прикреплен к корпусу 11. Поскольку корпус 11 закреплен относительно основания 31, элементом 35 дополнительная инерция не создается. Такое прикрепление к корпусу 11 позволяет уменьшить длину трубопровода, который соединяет элемент 35 и корпус 11. Это позволяет понизить перепад давлений в этом трубопроводе. Это преимущество становится важным, когда перемещения перемещающейся верхней платформы должны быть быстрыми, приводя к быстрому перемещению гидравлической текучей среды между элементом 35 и камерами 16 и 17.
Поршень 12 имеет трубчатую форму и содержит отверстие 36, через которое может пройти шток 18. Отверстие 36 является, например, круглым вокруг оси 13 и его диаметр должен быть достаточно большим, чтобы дать возможность штоку 18 осуществлять небольшое угловое смещение вокруг оси 13, причем смещение совместимо с максимальной степенью смещения перемещающейся верхней платформы 32.
Фиг.4 представляет собой вид в перспективе образца одного варианта осуществления гексаподной платформы 30, аналогичной изображенной на фиг.2.
Шесть силовых цилиндров имеют ссылочные позиции с 10-1 по 10-6. Они все идентичны силовому цилиндру 10, описанному выше. Корпусы 11 различных силовых цилиндров прикреплены парами к основанию 31 крепежными элементами. Точнее силовые цилиндры 10-1 и 10-2 прикреплены к крепежному элементу 40, силовые цилиндры 10-3 и 10-4 прикреплены к крепежному элементу 41, и силовые цилиндры 10-5 и 10-6 прикреплены к крепежному элементу 42. Штоки с 18-1 по 18-6 соединены с перемещающейся верхней платформой 32 посредством шаровых шарниров с 24-1 по 24-6. Эти шаровые шарниры сгруппированы в пары. Пары шаровых шарниров с 24-1 по 24-6 меняются относительно пар силовых цилиндров, сгруппированных вместе крепежным элементом за крепежным элементом. Точнее шаровые шарниры 24-2 и 24-3 образуют первую пару, шарниры 24-4 и 24-5 образуют вторую пару, и шаровые шарниры 24-6 и 24-1 образуют третью пару.
Гексаподная платформа 30 содержит резервуары, которые действуют как аккумуляторы гидравлической текучей среды. Эти резервуары содержат гидравлическую текучую среду как при высоком давлении, так и при низком давлении. Управляющий элемент 35, соединенный с каждым силовым цилиндром с 10-1 по 10-6, позволяет соединение камер каждого силового цилиндра с 10-1 по 10-6 как с текучей средой высокого давления, так и с текучей средой низкого давления. Все эти резервуары закреплены относительно основания 31 и поэтому закреплены относительно корпуса 11 каждого из силовых цилиндров с 10-1 по 10-6. Гексаподная платформа 30, например, содержит резервуары с 44-1 по 44-6 низкого давления, соединенные с каждым соответствующим силовым цилиндром с 10-1 по 10-6, и резервуары 45, 46 и 47 высокого давления, которые общие для двух силовых цилиндров. Точнее один резервуар 45 высокого давления соединен с силовыми цилиндрами 10-1 и 10-2, один резервуар 46 высокого давления соединен с силовыми цилиндрами 10-3 и 10-4, и один резервуар 47 высокого давления соединен с силовыми цилиндрами 10-5 и 10-6. Резервуары высокого давления и низкого давления могут быть соединены с силовыми цилиндрами с 10-1 по 10-6 посредством крепежных элементов с 40 по 42, к которым прикреплены резервуары.
Жесткий трубопровод соединяет резервуары с управляющими элементами 35 каждого силового цилиндра с 10-1 по 10-6. Центральное гидравлическое устройство может снабжать гидравлической текучей средой, находящейся под давлением, разные резервуары. Это устройство может быть соединено с разными крепежными элементами с 40 по 42.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНАЯ ПЛАТФОРМА | 2000 |
|
RU2182212C2 |
| ЭНЕРГЕТИЧЕСКАЯ СИСТЕМА НА БАЗЕ ПОПЛАВКОВОГО НАСОСА | 2005 |
|
RU2430264C2 |
| СТАНОК ДЛЯ УСТАНОВКИ ИНСТРУМЕНТА ОТНОСИТЕЛЬНО ЗАГОТОВКИ | 1990 |
|
RU2076020C1 |
| МЕТАЛЛОРЕЖУЩИЙ ГЕКСАПОДНЫЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР И ГЕКСАПОДНЫЙ МЕХАНИЗМ ДЛЯ НЕГО | 2005 |
|
RU2299797C2 |
| ПЛАВУЧАЯ ПЛАТФОРМА ДЛЯ ДОБЫЧИ НЕФТИ, ОСНАЩЕННАЯ УСТРОЙСТВАМИ ДЛЯ РАЗРУШЕНИЯ ПЛАВУЧЕГО ЛЬДА, И СПОСОБ РАЗРУШЕНИЯ ПЛАВУЧЕГО ЛЬДА ПРИ ПОМОЩИ ТАКОЙ ПЛАТФОРМЫ | 2008 |
|
RU2446074C2 |
| СЪЕМНИК ПЯТНИКА ВАГОНА | 2009 |
|
RU2405691C2 |
| ПОДЪЕМНИК ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2545532C2 |
| ОТСОЕДИНЯЕМАЯ ТУРЕЛЬНАЯ ЯКОРНАЯ СИСТЕМА С ВРАЩАЕМОЙ ПОВОРОТНОЙ ПЛАТФОРМОЙ | 2009 |
|
RU2489300C2 |
| Устройство для спуска спасательной шлюпки с прибрежной платформы или судна | 1983 |
|
SU1256697A3 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТАРЕЛЬЧАТЫМ КЛАПАНОМ (ВАРИАНТЫ) И СПОСОБ ВЫВОДА ИЗ РАБОТЫ ЦИЛИНДРОВ | 2015 |
|
RU2673045C2 |
Изобретение относится к гексаподной платформе. Гексаподная платформа содержит основание, перемещающуюся верхнюю платформу и шесть силовых цилиндров. Каждый из силовых цилиндров содержит корпус, поршень, выполненный с возможностью поступательного перемещения относительно корпуса, и шток, соединенный с поршнем для движения вслед его поступательному перемещению, посредством которого силовой цилиндр прикладывает нагрузку. В каждом силовом цилиндре шток соединен с поршнем посредством шарового шарнира на одном из его концов. Каждый силовой цилиндр содержит второй шаровой шарнир, расположенный на втором конце штока. При этом шесть силовых цилиндров прикреплены к основанию посредством их корпусов и соединены с перемещающейся верхней платформой посредством их второго шарового шарнира. Изобретение позволит уменьшить инерцию гексаподной платформы, что позволит облегчить верхней платформе быстрые и широкоамплитудные перемещения. 8 з.п. ф-лы, 4 ил.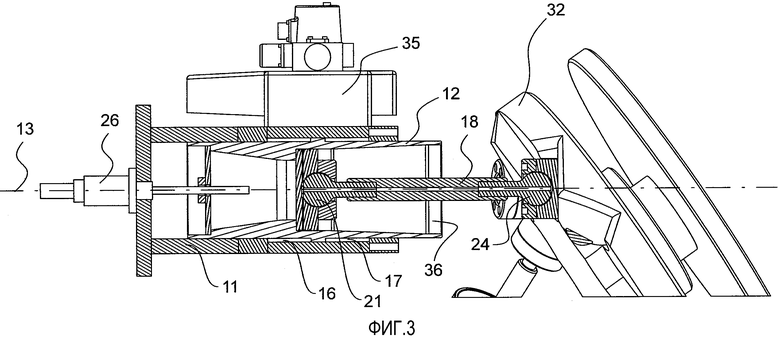
1. Гексаподная платформа, содержащая основание (31), перемещающуюся верхнюю платформу (32) и шесть силовых цилиндров (с 10-1 по 10-6), причем каждый из силовых цилиндров (с 10-1 по 10-6) содержит корпус (11), поршень (12), выполненный с возможностью поступательного перемещения относительно корпуса (11), и шток, соединенный с поршнем (12) для движения вслед его поступательному перемещению, посредством которого силовой цилиндр (с 10-1 по 10-6) прикладывает нагрузку, отличающаяся тем, что в каждом силовом цилиндре (с 10-1 по 10-6) шток (18) соединен с поршнем (12) посредством шарового шарнира (21) на одном (19) из его концов (19, 20) и каждый силовой цилиндр (с 10-1 по 10-6) содержит второй шаровой шарнир (24), расположенный на втором конце (20) штока (18), при этом шесть силовых цилиндров (с 10-1 по 10-6) прикреплены к основанию (31) посредством их корпусов (11) и соединены с перемещающейся верхней платформой (32) посредством их второго шарового шарнира (с 24-1 по 24-6).
2. Платформа по п.1, отличающаяся тем, что шесть силовых цилиндров (с 10-1 по 10-6) являются гидравлическими силовыми цилиндрами, в каждом силовом цилиндре (с 10-1 по 10-6) шаровой шарнир (21) является гидростатическим и снабжается текучей средой посредством спуска текучей среды, используемой для управления силовым цилиндром (10).
3. Платформа по п.2, отличающаяся тем, что в каждом силовом цилиндре (с 10-1 по 10-6) второй шаровой шарнир (24) является гидростатическим и снабжается текучей средой посредством спуска текучей среды, используемой для управления силовым цилиндром (10).
4. Платформа по п.3, отличающаяся тем, что в каждом силовом цилиндре (с 10-1 по 10-6) подача текучей среды во второй шаровой шарнир передается посредством канала (25), расположенного в штоке (18) и соединяющего два шаровых шарнира (21, 24).
5. Платформа по любому из пп.2-4, отличающаяся тем, что каждый из силовых цилиндров (с 10-1 по 10-6) содержит две камеры (16, 17), образованные в корпусе (11) и разделенные поршнем (12), и для каждого из силовых цилиндров (с 10-1 по 10-6) текучая среда течет через один или более каналов (22, 23), соединяющих каждую из камер (16, 17) и шаровой шарнир (21).
6. Платформа по любому из пп.1-4, отличающаяся тем, что каждый из силовых цилиндров (10-1 к 10-6) содержит гидравлический управляющий элемент (35) для управления силовым цилиндром (10), причем элемент (35) прикреплен к корпусу (11) силового цилиндра (10).
7. Платформа по любому из пп.1-4, отличающаяся тем, что она содержит крепежные элементы (40, 41, 42), установленные на основании (31) и к которым попарно прикреплены корпусы (11) силовых цилиндров (с 10-1 по 10-6), и накопительные резервуары гидравлической текучей среды (с 44-1 по 44-6, 45, 46 и 47), соединенные с силовыми цилиндрами (с 10-1 по 10-6) и прикрепленные к крепежным элементам (40, 41, 42).
8. Платформа по п.5, отличающаяся тем, что каждый из силовых цилиндров (10-1 к 10-6) содержит гидравлический управляющий элемент (35) для управления силовым цилиндром (10), причем элемент (35) прикреплен к корпусу (11) силового цилиндра (10).
9. Платформа по п.5, отличающаяся тем, что она содержит крепежные элементы (40, 41, 42), установленные на основании (31) и к которым попарно прикреплены корпусы (11) силовых цилиндров (с 10-1 по 10-6), и накопительные резервуары гидравлической текучей среды (с 44-1 по 44-6, 45, 46 и 47), соединенные с силовыми цилиндрами (с 10-1 по 10-6) и прикрепленные к крепежным элементам (40, 41, 42).
| US 6741912 B2, 25.05.2004; | |||
| Многоступенчатый компрессор | 1972 |
|
SU515888A1 |
| WO 2002034461 A2, 02.05.2002; | |||
| US 5901936 A1, 11.05.1999 | |||
| ШЕСТИСТЕРЖНЕВОЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР | 1997 |
|
RU2160657C2 |

