Изобретение относится к технике неразрушающего контроля качества магистральных трубопроводов, в частности к способам внутритрубной дефектоскопии с помощью дефектоскопов-снарядов (см., например, «Техника и технология транспорта и хранения нефти, газа» под редакцией д.т.н. В.Ф. Новоселова М. Недра 1992 г., стр. 210).
Известны способ определения в трубопроводе разрывов и деформаций и устройство для его осуществления (патент RU 2109206 CI, 20.04.1998). Показано, что дефектоскоп-снаряд может передвигаться как по потоку транспортируемого продукта, так и против потока для более детального анализа выявленного дефекта, а полученная им информация передается на наземный пункт управления, расположенный на насосной станции, после прихода туда дефектоскопа-снаряда.
Известны способ и устройство дистанционной - по радиоканалу - передачи информации о состоянии трубопровода в процессе движения дефектоскопа-снаряда между насосными станциями, а также обратной выдачи (с одной из насосных станций) команд управления дефектоскопом-снарядом (патент RU 2425278 CI, 27.07.011).
Известен дефектоскоп-снаряд для внутритрубного обследования трубопроводов, содержащий патрубок для пропуска транспортируемого по обследуемому трубопроводу продукта и систему автоматического регулирования скорости перемещения на основе запорно-регулирующего устройства в патрубке (патент RU 2069288 CI, 20.11.1996). Однако наличие в дефектоскопе-снаряде пропускного отверстия малого относительно диаметра трубы сечения существенно ограничивает возможности устойчивой радиосвязи в метровом диапазоне длин волн с приемно-передатчиками на ближайших насосных станциях.
Анализ известных способов внутритрубной дефектоскопии магистральных трубопроводов показывает, что наиболее важными факторами дефектоскопии являются получение достоверной информации о дефектах внутренней поверхности трубопровода (наличие разрывов стенок и их конфигурации; наличие посторонних предметов, врезок), их точных координат, надежная передача полученной информации на насосные станции, с обратной выдачей управляющих команд дефектоскопу-снаряду на изменение режима его движения, вплоть до реверсного в условиях непрекращающейся подачи транспортируемого продукта в трубопровод, но возможного изменения его давления и (или) скорости.
Наиболее близким к предлагаемому техническому решению является способ внутритрубной дефектоскопии по патенту RU 2425278 CI, 27.07.2011, заключающийся в измерении при перемещении, в том числе реверсном (с использованием аэродинамического винта), двухмодульного дефектоскопа-снаряда по магистральному трубопроводу величины электрического тока, распределенного в стенках трубопровода, магнитных и электромагнитных параметров материала стенок трубопровода и их отклонений от заданных значений, определении и регистрации координат выявленных отклонений, получении изображения внутренней поверхности трубопровода, передачи информации с борта дефектоскопа-снаряда путем радиосвязи в метровом диапазоне длин волн на насосные станции, расположенные по трассе трубопровода, между которыми находится дефектоскоп-снаряд, путем возбуждения в данном трубопроводе радиоволны типа Н11 и управлении дефектоскопом-снарядом на основании полученных по радиоканалу с насосных станций команд.
Однако в описанном способе, ввиду неизменности площади поперечного сечения дефектоскопа-снаряда, ограничены возможности изменения параметров движения дефектоскопа-снаряда при изменении скорости и (или) давления транспортируемого по трубопроводу продукта. Кроме того, за счет использования аэродинамического винта возможен «крутящий момент» дефектоскопа-снаряда по крену, приводящий к снижению точности измерений. Также в аналоге отсутствует возможность контроля внутренней поверхности трубы оптическими средствами.
Целью изобретения является создание способа и устройства на его основе, обеспечивающих расширение возможностей управления движением дефектоскопа-снаряда, повышение точности измерений в условиях изменяющихся параметров относительного движения транспортируемого продукта и дефектоскопа-снаряда.
Указанная цель достигается тем, что в предлагаемом способе внутритрубной дефектоскопии, заключающемся в измерении при перемещении двухмодульного дефектоскопа-снаряда по магистральному трубопроводу величины электрического тока, распределенного в стенках трубопровода, магнитных и электромагнитных параметров материала стенок трубопровода и их отклонений от заданных значений, определении и регистрации координат выявленных отклонений, получении изображения внутренней поверхности трубопровода, передачи информации с борта дефектоскопа-снаряда путем радиосвязи в метровом диапазоне длин волн на насосные станции, расположенные по трассе трубопровода, между которыми находится дефектоскоп-снаряд, путем возбуждения в данном трубопроводе радиоволны типа Н11 и управлении дефектоскопом-снарядом на основании полученных по радиоканалу с насосных станций команд, осуществляют внутритрубную дефектоскопию магистральных трубопроводов двухмодульным дефектоскопом-снарядом с изменяемой площадью поперечного сечения по внешнему обводу корпуса, а изображение внутренней поверхности трубопровода получают в видимом диапазоне электромагнитных волн и сохраняют в электронной памяти дефектоскопа-снаряда на период движения между несколькими насосными станциями.
В устройстве двухмодульного дефектоскопа-снаряда, содержащем гидросистему возвратно-поступательного перемещения, соединяющую два модуля, аэродинамический винт, расположенный на одном из модулей, систему управления, систему обработки и регистрации информации, комплект приемной и передающей аппаратуры радиосвязи с насосными станциями, расположенными на трассе трубопровода, дополнительно на одном из модулей дефектоскопа-снаряда в плоскости, перпендикулярной продольной оси модуля, установлены плоские створки, выполненные с возможностью синхронного раскрытия и увеличения площади поперечного сечения дефектоскопа-снаряда по внешнему обводу корпуса до 85%±3% площади внутреннего поперечного сечения трубопровода, убирающиеся за внешний обвод корпуса дефектоскопа-снаряда при закрытии. Створки выполнены из диэлектрического материала с диэлектрической проницаемостью 3÷6, тангенсом угла диэлектрических потерь меньшим или равным 0,15 и толщиной меньшей или равной 1% рабочей длины волны радиосвязи для исключения влияния створок на прохождение радиоволн радиолинии дефектоскоп-снаряд - насосная станция. Соосно с аэродинамическим винтом дополнительно установлен аэродинамический винт, выполненный с возможностью противоположного вращения относительно основного аэродинамического винта. Оба аэродинамических винта выполнены с изменяемым шагом лопастей. На каждом модуле дефектоскопа-снаряда дополнительно установлены балансировочные грузы, расположенные ниже продольной оси модуля и находящиеся на вертикали, проходящей через продольную ось симметрии модуля на расстоянии, равном 20÷25% от величины внутреннего диаметра трубопровода, по которому движется дефектоскоп-снаряд, с погрешностью размещения центра тяжести дефектоскопа-снаряда относительно этой вертикали на ±2°, выполненные с возможностью перемещения по модулю в продольном и поперечном направлении. На втором модуле дефектоскопа-снаряда дополнительно установлено оптикоэлектронное устройство для получения в видимом диапазоне электромагнитных волн изображения внутренней поверхности трубопровода. Оптикоэлектронное устройство содержит не менее шести однотипных блоков, равномерно размещенных по наружной поверхности корпуса модуля в плоскости, перпендикулярной продольной оси модуля с погрешностью, не превышающей ±2°, оснащенных оптикоэлектронной системой получения изображения внутренней поверхности трубопровода, устройством оптической подсветки внутренней поверхности трубопровода, устройством связи с системой обработки и регистрации информации дефектоскопа-снаряда, системой очистки светопропускающих поверхностей оптикоэлектронной системы от загрязнения в процессе функционирования в трубопроводе, при этом угол поля зрения оптикоэлектронной системы блока выполнен с обеспечением перекрытия более чем на 5° угла поля зрения системы соседнего блока в плоскости размещения блоков.
На фиг. 1 изображен общий вид дефектоскопа-снаряда, размещенного в трубопроводе. Дефектоскоп-снаряд содержит модули 6 и 9, каждый модуль содержит вибраторы 3, опорные органы 5 с узлами радиального перемещения опорных органов 4, модули соединены между собой гидросистемой возвратно-поступательного перемещения 7. Модуль 6 снабжен аэродинамическим винтом 1, соосно которому установлен аэродинамический винт 2, длина каждой из лопастей аэродинамических винтов 1 и 2 меньше четверти рабочей длины волны радиолинии дефектоскоп-снаряд - насосная станция. Модуль 9 содержит плоские створки 8, оптоэлектронное устройство 10, систему обработки и регистрации информации 11, приемно-передающее устройство радиолинии 12. Оптоэлектронное устройство 10 содержит не менее шести однотипных блоков, равномерно размещенных по наружной поверхности корпуса модуля в плоскости, перпендикулярной оси модуля. Каждый из этих блоков оснащен оптоэлектронной системой получения изображения внутренней поверхности трубопровода, устройством связи с системой обработки и регистрации информации дефектоскопа-снаряда 11, а система обработки и регистрации 11 соединена с приемно-передающим устройством радиолинии дефектоскоп-снаряд - насосные станции 12. На модулях 6 и 9 установлены балансировочные грузы 13.
Дефектоскоп-снаряд работает следующим образом. Перед началом измерений дефектоскоп-снаряд находится в шлюзовой камере. Через шлюзовую камеру дефектоскоп-снаряд вводится в начало контролируемого участка магистрального трубопровода, по которому движется транспортируемый продукт в газообразном состоянии, например, газ природный ГОСТ 30319.0-96. При движении по трубопроводу дефектоскоп-снаряд проводит измерения состояния трубопровода. Дефектоскоп-снаряд имеет два режима передвижения по трубопроводу: непрерывный и шаговый.
При непрерывном режиме передвижение дефектоскопа-снаряда обеспечивается так называемой «байпасной» схемой взаимодействия транспортируемого продукта и дефектоскопа-снаряда, при которой транспортируемый продукт обтекает элементы конструкции снаряда, создавая на них продольную силу, заставляющую дефектоскоп-снаряд перемещаться в направлении движения транспортируемого потока. При этом аэродинамический винт 1 вращается, мощность с его вала передается в гидросистему дефектоскопа-снаряда, управляющую узлами радиального перемещения 4 и опорными органами 5, которые обеспечивают необходимое усиление прижима дефектоскопа-снаряда к внутренней поверхности трубы и тем самым регулируют тормозной момент дефектоскопа-снаряда, определяющий скорость его движения по трубопроводу. При изменении плотности и (или) скорости транспортируемого потока использование створок 8 позволяет поддержать необходимую скорость дефектоскопа-снаряда путем изменения площади поперечного сечения выдвижением створок за внешний обвод корпуса или складыванием створок. При шаговом режиме дефектоскопа-снаряда створки 8 должны быть сложены.
Возможность управления шагом лопастей аэродинамических винтов 1 и 2 также позволяет изменять площадь поперечного сечения дефектоскопа-снаряда, путем их разворота относительно набегающего потока транспортируемого продукта.
При вращении аэродинамического винта 1 возникает крутящий момент, передающийся на корпус дефектоскопа-снаряда вокруг его продольной оси. Для его компенсации используется аэродинамический винт противовращения 2, создающий крутящий момент, компенсирующий крутящий момент аэродинамического винта 1.
В процессе движения дефектоскопа-снаряда по трубопроводу электронно-оптическая система 10 обеспечивает получение изображения внутренней поверхности трубопровода в видимом диапазоне электромагнитных волн, что особенно важно для оценки состояния покрытий внутренней поверхности трубопроводов, наличия ржавчины, нарушения однородности поверхности, врезок, вмятин, посторонних предметов. Измерения проводятся в плоскости, перпендикулярной продольной оси дефектоскопа-снаряда. Информация с нескольких независимых оптоэлектронных блоков с перекрывающимися углами зрения между соседними оптоэлектронными блоками передается в систему обработки и регистрации информации дефектоскопа-снаряда 11 от каждого блока по отдельному каналу, что исключает пропуски и частичную потерю информации. После обработки информация через приемно-передающее устройство 12 передается на насосные станции. Дальнейшая обработка полученных изображений проводится на насосных станциях.
Устройство подсветки получаемых изображений оснащено средствами освещения с минимизацией бликов (на фиг. 1 не показаны), также предусмотрена соответствующая окраска элементов конструкции дефектоскопа-снаряда. Необходимость очистки светопропускающих поверхностей оптоэлектронной системы определяется на этапе анализа полученной информации на насосных станциях и выполняется по командам с насосных станций.
Предлагаемое техническое решение позволяет получить более достоверную и точную информацию о состоянии внутренней поверхности магистральных трубопроводов при изменяющихся условиях движения транспортируемого продукта и, как следствие, повышает эффективность применения дефектоскопа-снаряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВУХМОДУЛЬНЫМ ДЕФЕКТОСКОПОМ-СНАРЯДОМ В ПРОЦЕССЕ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2425278C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2109206C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВНУТРИТРУБНЫМ ОБЪЕКТОМ | 2013 |
|
RU2528790C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644430C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644429C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЖИМА ДВИЖЕНИЯ ДИАГНОСТИЧЕСКОГО СНАРЯДА В ЭТАНОПРОВОДЕ | 2016 |
|
RU2644431C2 |
| СПОСОБ ИСПЫТАНИЯ ВНУТРИТРУБНОГО ИНСПЕКЦИОННОГО ПРИБОРА НА КОЛЬЦЕВОМ ТРУБОПРОВОДНОМ ПОЛИГОНЕ | 2012 |
|
RU2526579C2 |
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 1999 |
|
RU2148808C1 |
Изобретение относится к технике неразрушающего контроля качества магистральных трубопроводов, в частности, к способам внутритрубной дефектоскопии с помощью дефектоскопов-снарядов. Способ заключается в измерении параметров материалов и выявлении дефектов в магистральных трубопроводах с меняющимися плотностями и скоростями транспортируемого продукта при помощи двухмодульного дефектоскопа-снаряда с изменяемой площадью поперечного сечения по внешнему обводу корпуса и получение изображения внутренней поверхности трубопровода в видимом диапазоне длин волн. В устройстве двухмодульного дефектоскопа-снаряда на одном из модулей в плоскости, перпендикулярной его продольной оси, размещены плоские створки, выполненные с возможностью синхронного раскрытия и увеличения площади поперечного сечения дефектоскопа-снаряда, установлен дополнительный аэродинамический винт с направлением вращения противоположном первому, применены средства балансировки центров масс и установлено многоканальное оптикоэлектронное устройство для получения информации о внутренней поверхности трубопровода. Предлагаемое техническое решение позволяет получить более достоверную и точную информации о состоянии внутренней поверхности магистральных трубопроводов при изменяющихся условиях движения транспортируемого продукта и, как следствие, повышает эффективность применения дефектоскопа-снаряда. 2 н. и 4 з.п. ф-лы, 1 ил.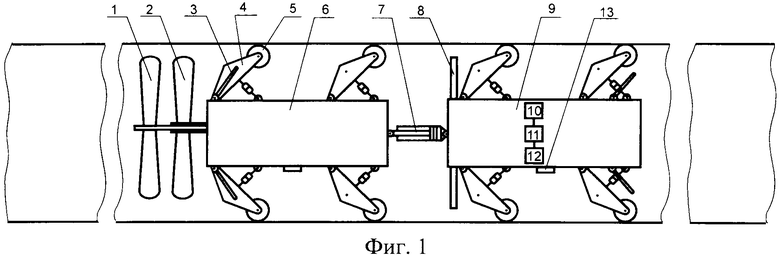
1. Способ внутритрубной дефектоскопии, заключающийся в измерении при перемещении двухмодульного дефектоскопа-снаряда по магистральному трубопроводу величины электрического тока, распределенного в стенках трубопровода, магнитных и электромагнитных параметров материала стенок трубопровода и их отклонений от заданных значений, определении и регистрации координат выявленных отклонений, получении изображения внутренней поверхности трубопровода, передаче информации с борта дефектоскопа-снаряда путем радиосвязи в метровом диапазоне длин волн на насосные станции, расположенные по трассе трубопровода, между которыми находится дефектоскоп-снаряд, путем возбуждения в данном трубопроводе радиоволны типа Н11 и управлении дефектоскопом-снарядом на основании полученных по радиоканалу с насосных станций команд, отличающийся тем, что осуществляют внутритрубную дефектоскопию магистральных трубопроводов двухмодульным дефектоскопом-снарядом с изменяемой площадью поперечного сечения по внешнему обводу корпуса.
2. Способ внутритрубной дефектоскопии по п. 1, отличающийся тем, что изображение внутренней поверхности трубопровода получают в видимом диапазоне электромагнитных волн и сохраняют в электронной памяти дефектоскопа-снаряда на период движения между несколькими насосными станциями.
3. Двухмодульный дефектоскоп-снаряд для внутритрубной дефектоскопии, содержащий гидросистему возвратно-поступательного перемещения, соединяющую два модуля, аэродинамический винт, расположенный на одном из модулей, систему управления, систему обработки и регистрации информации, комплект приемной и передающей аппаратуры радиосвязи с насосными станциями, расположенными на трассе трубопровода, отличающийся тем, что на одном из модулей дефектоскопа-снаряда в плоскости, перпендикулярной продольной оси модуля, дополнительно установлены плоские створки, выполненные с возможностью синхронного раскрытия и увеличения площади поперечного сечения дефектоскопа-снаряда по внешнему обводу корпуса до 85%±3% площади внутреннего поперечного сечения трубопровода, убирающиеся за внешний обвод корпуса дефектоскопа-снаряда при закрытии, створки выполнены из диэлектрического материала с диэлектрической проницаемостью 3÷6, тангенсом угла диэлектрических потерь меньшим или равным 0,15 и толщиной меньшей или равной 1% рабочей длины волны радиосвязи.
4. Двухмодульный дефектоскоп-снаряд по п. 3, отличающийся тем, что соосно с аэродинамическим винтом дополнительно установлен аэродинамический винт, выполненный с возможностью вращения в сторону, противоположную основному аэродинамическому винту, при этом оба аэродинамических винта выполнены с изменяемым шагом лопастей.
5. Двухмодульный дефектоскоп-снаряд по п. 3, отличающийся тем, что на каждом модуле дефектоскопа-снаряда дополнительно установлены балансировочные грузы, расположенные ниже продольной оси модуля и находящиеся на вертикали, проходящей через продольную ось симметрии модуля на расстоянии, равном 20÷25% от величины внутреннего диаметра трубопровода, по которому движется дефектоскоп-снаряд с погрешностью размещения центра тяжести дефектоскопа-снаряда относительно этой вертикали на ±2°, выполненные с возможностью перемещения по модулю в продольном и поперечном направлении.
6. Двухмодульный дефектоскоп-снаряд по п. 3, отличающийся тем, что на втором модуле дефектоскопа-снаряда дополнительно установлено оптикоэлектронное устройство для получения в видимом диапазоне электромагнитных волн изображения внутренней поверхности трубопровода, содержащее не менее шести однотипных блоков, равномерно размещенных по наружной поверхности корпуса модуля в плоскости, перпендикулярной продольной оси модуля с погрешностью, не превышающей 2°, оснащенных оптикоэлектронной системой получения изображения внутренней поверхности трубопровода, устройством оптической подсветки внутренней поверхности трубопровода, устройством связи с системой обработки и регистрации информации дефектоскопа-снаряда, системой очистки светопропускающих поверхностей оптикоэлектронной системы от загрязнения в процессе функционирования в трубопроводе, при этом угол поля зрения оптикоэлектронной системы блока выполнен с обеспечением перекрытия более чем на 5° угла поля зрения системы соседнего блока в плоскости размещения блоков.
| СПОСОБ УПРАВЛЕНИЯ ДВУХМОДУЛЬНЫМ ДЕФЕКТОСКОПОМ-СНАРЯДОМ В ПРОЦЕССЕ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2425278C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2109206C1 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 1993 |
|
RU2069288C1 |
| US 3539915 A, 10.11.1970 | |||
| ОРГАНОМИНЕРАЛЬНОЕ УДОБРЕНИЕ | 2017 |
|
RU2667159C1 |

