Область техники
Изобретение относится к области измерительной техники обеспечения летных испытаний и исследований воздушных судов (ВС) и их систем и может быть использована для контроля и управления ходом испытательного (исследовательского) полета ВС.
Уровень техники
Существующая в США на базе Эдварде (западный испытательный авиационный полигон - WATR) система управления испытательными полетами предоставляет возможность передачи информации в другие центры управления при межполигонных испытаниях, в том числе с использованием спутниковой связи.
Однако подробная информация о ее составе и характеристиках отсутствует.
Известны системы автоматизированной обработки информации в реальном времени для обеспечения летных испытаний (патент США № US 7,693,986 В2, 2010 и др.), однако они предназначены для использования на борту испытываемого ВС, при этом не требуется передача информации на значительное расстояние, задачи обмена информацией решаются использованием локальной вычислительной сети (ЛВС).
Известна система управления летным экспериментом ЛИИ, которая решает в целом те же задачи, однако в зале Пункта управления летным экспериментом (ПУЛЭ) могут находиться лишь те специалисты, которые необходимы для контроля и управления испытательным полетом. В то же время, предоставление более широкому кругу специалистов информации непосредственно во время выполнения полета на их рабочих местах позволит сократить время послеполетного анализа результатов эксперимента.
Технический результат, на достижение которого направлено изобретение, заключается в повышении эффективности и безопасности летных испытаний при сокращении сроков летных испытаний.
Существенные признаки
Для достижения этого технического результата в системе обработки и анализа полетной информации в реальном времени и управления летным экспериментом, содержащей систему управления летным экспериментом, включающей бортовую систему радиотелеметрических измерений (РТС), наземный измерительный комплекс (ИК), содержащий приемные станции РТС, систему внешнетраекторных измерений (ВТИ), систему единого времени (СЕВ), соединенную со входами РТС и системы ВТИ, линии связи, соединенные с выходами системы ВТИ и приемных РТС; пункт управления летным экспериментом (ПУЛЭ), в состав которого введены последовательно соединенные блок ввода информации, вход которого соединен с выходом линии связи, вычислительный комплекс, включающий локальную вычислительную сеть автоматизированной обработки полетной информации в реальном времени, блок вывода информации, второй вычислительный комплекс, объединенный в локальную вычислительную сеть (ЛВС) отображения и управления, в состав которого входят автоматизированные рабочие места (АРМ) руководителя испытаний и специалистов группы управления, а также средства радиосвязи с экипажем испытываемого ВС и оперативно-командной связи со средствами ИК, дополнительно введена распределенная система обработки и анализа полетной информации в реальном времени, размещенная в пунктах наблюдения, распределенных по летно-испытательным подразделениям конструкторских бюро, проводящих испытания, содержащих ЛВС, в состав которой входят АРМ специалистов группы обработки и анализа информации, снабженные телефонной связью с ПУЛЭ, вычислительные блоки вторичной обработки результатов измерений, математического и/или полунатурного моделирования, блоки сравнения результатов сопровождающего моделирования с данными летных испытаний, образующие вычислительный комплекс обработки, отображения и анализа параметров ВС и/или бортовых систем, входы которых связаны со вторым выходом блока вывода информации вычислительного комплекса обработки полетной информации ПУЛЭ с помощью дуплексной линии связи и установленной на обоих концах ее каналообразующей аппаратуры. Выход блока сопровождающего моделирования через блок сравнения связан с входами блока вторичной обработки результатов измерений и со вторым входом вычислительного комплекса отображения и управления ПУЛЭ. Выходы блока вторичной обработки результатов измерений соединены со вторым входом вычислительного комплекса отображения и управления ПУЛЭ и с входом вычислительного комплекса отображения на экране АРМ анализа информации.
Автоматизированные рабочие места группы наблюдения и анализа информации используют для проведения более подробной оценки характеристик ВС и систем при проведении летно-конструкторских испытаний дополнительную вторичную обработку, сопровождающее моделирование полета ВС и его систем, комплексное отображение информации.
Повышение эффективности и сокращение сроков летных испытаний достигается также за счет обеспечения возможности наблюдения и анализа полетной информации с использованием при необходимости дополнительных средств, таких как расширенный состав блоков вторичной обработки на АРМ пунктов наблюдения и анализа, средств математического и полунатурного сопровождающего моделирования, в том числе, пилотажных моделирующих стендов, стендов для отработки систем ВС, что позволяет сократить время межполетной обработки и анализа информации.
На фиг. 1 приведена блок-схема предлагаемой системы обработки и анализа полетной информации в реальном времени и управления летным экспериментом.
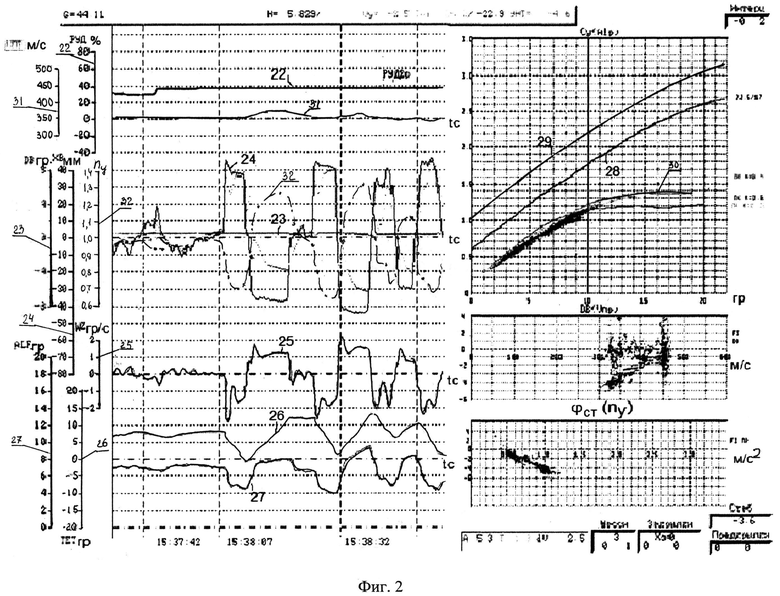
На фиг. 2 показан пример отображения информации о характеристиках устойчивости и управляемости ВС на АРМ анализа динамики полета пункта наблюдения.
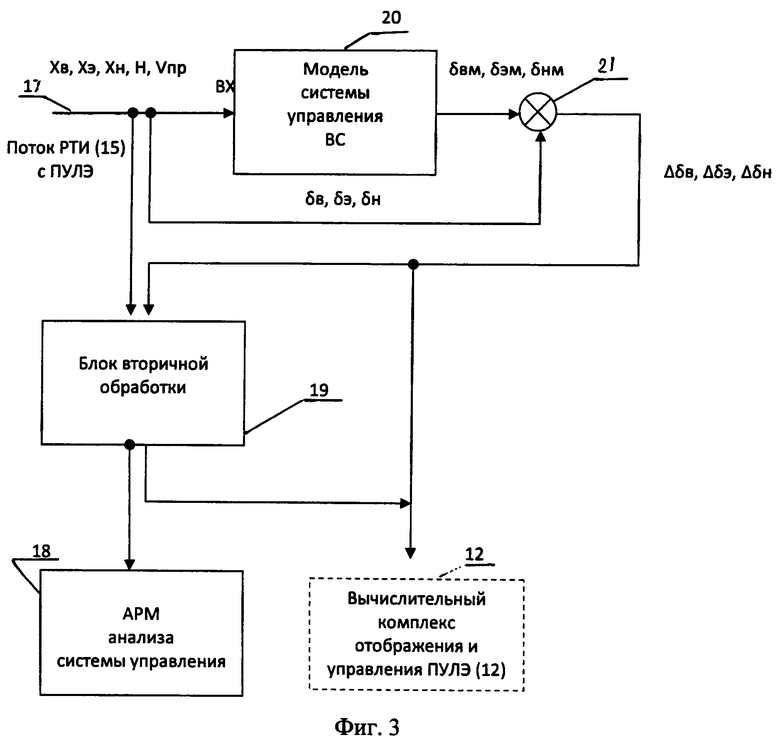
На фиг. 3 показана блок-схема математического и/или полунатурного моделирования системы управления ВС на пункте наблюдения.
Система обработки и анализа полетной информации в реальном времени и управления летным экспериментом содержит систему управления летным экспериментом, части которой установлены на борту испытываемого ВС 1 систему радиотелеметрических измерений 2, а на земле - измерительный комплекс 3, включающий приемные радиотелеметрические станции (РТС) 4, систему внешнетраекторных измерений (ВТИ) 6, синхронизированные с помощью системы единого времени 5, линии связи 7, соединенные с выходами системы ВТИ 6 и РТС 4, передающие информацию на пункт управления летным экспериментом (ПУЛЭ) 8, содержащий блок ввода информации 9, вычислительный комплекс - локальную вычислительную сеть автоматизированной обработки информации в реальном времени 10, блок вывода информации 11, второй вычислительный комплекс системы отображения информации и управления 12, включающий автоматизированные рабочие места руководителя испытаний (РИ) и специалистов 13, оснащенные средствами радиосвязи с экипажем 1 и оперативно-командной связи со средствами измерительного комплекса 4 и 6.
Дополнительно на земле установлена распределенная система обработки и анализа полетной информации в реальном времени и управления летным экспериментом, в которую включены помимо собственно системы управления летным экспериментом также один или несколько пунктов наблюдения и анализа информации 14, связанных с блоком вывода информации 11 с помощью линий связи 15 с установленной на обоих концах каждой линии каналообразующей аппаратурой 16 и 17, выход которой подается в локальную вычислительную сеть, в которой реализованы АРМ специалистов группы наблюдения и анализа 18 с соответствующими вычислительными блоками вторичной обработки 19 результатов измерений, и с которой сопряжены средства сопровождающего математического и/или полунатурного моделирования 20, блок сравнения 21. Выход блока 17 подключен к входам блоков 19,20, 21. Выход блока 21 подключен к входам блока 19 и блока 12. Выход блока 19 подключен к входам 18 и 12.
В зависимости от необходимой скорости передачи информации, объемов передаваемых информационных потоков и расстояния между системой обработки в реальном времени ПУЛЭ и пунктами наблюдения могут использоваться следующие типы линий связи:
- выделенные (некоммутируемые) телефонные линии связи;
- оптико-волоконные линии связи;
- каналы сотовой связи;
- каналы спутниковой связи и др.
При этом линии связи 15 и каналообразующая аппаратура 16 и 17 должны обеспечивать защиту циркулирующей информации, для чего должны быть предусмотрены блоки кодирования (шифрования) информации на передающем конце и декодирования (расшифровки) на приемном конце линии связи.
Базовое программное обеспечение (ПО) пунктов наблюдения в целом идентично ПО системы отображения и управления ПУЛЭ, однако на пунктах наблюдения могут реализовываться и другие программы вторичной обработки, в том числе сопровождающего моделирования, и форматы отображения информации.
Система работает следующим образом.
Экспериментальное воздушное судно (ВС) 1 оборудуется бортовой системой радиотелеметрических измерений (СРТИ) 2, см. фиг. 1 и фиг. 3.
На земле функционирует измерительный комплекс 3, включающий приемные станции радиотелеметрической системы 4 и систему ВТИ 6. Все наземные измерительные средства (4 и 6) синхронизированы с использованием выхода системы единого времени 5. Измерительная информация от средств измерительного комплекса 4 и 6 передается с помощью линий связи 7 на ПУЛЭ 8, включающий вычислительные комплексы автоматизированной обработки измерительной информации в реальном времени 10 и отображения информации и управления 12. После выполнения вычислительным комплексом обработки 10 расшифровки входного потока и получения физических значений измеряемых параметров, выходной поток, содержащий обработанную информацию, регистрируется на жестких дисках системы и по локальной сети поступает в вычислительный комплекс отображения и управления ПУЛЭ 12. На автоматизированных рабочих местах 13 комплекса отображения информации и управления 12 производится прием информации и ее представление в текстовом и графическом виде с использованием графиков по времени и по параметрам, транспарантов, имитаторов приборов, при этом выполняется дополнительная обработка и вычисление расчетных показателей.
Информация со второго выхода блока вывода информации ПУЛЭ 11 передается также на пункты наблюдения и анализа полетной информации в реальном времени 14, располагающиеся в других точках в летно-испытательных подразделениях КБ-разработчика ВС, специальных лабораториях, с помощью дуплексных линий связи 15 с установленной на обоих концах каждой линии каналообразующей аппаратурой 16 и 17, выход которых подается в локальную вычислительную сеть, в которой реализованы АРМ специалистов группы наблюдения и анализа 18 с соответствующими вычислительными блоками вторичной обработки (по специальности, например, расчет характеристик динамики полета, определение параметров САУ, характеристик двигателя и другие) 19, а также средства сопровождающего математического и полунатурного моделирования 20. При необходимости результаты обработки или моделирования с пунктов наблюдения 14 передаются с помощью линий связи 15 и каналообразующей аппаратуры 16 и 17 на вход вычислительного комплекса отображения и управления ПУЛЭ 12 для отображения на рабочих местах соответствующих специалистов 13.
На АРМ анализа динамики полета проводится:
- анализ характеристик устойчивости и управляемости ВС, в том числе на больших углах атаки;
- оценка соответствия характеристик требованиям норм летной годности.
Для обеспечения анализа в реальном времени на рабочие места АРМ передается вся необходимая информация о параметрах, описывающих выполняемые режимы (параметры движения ВС, отклонения органов управления, режим работы двигателей и т.д.), на основании которой выполняются и отображаются на экране АРМ характеристики устойчивости и управляемости ВС.
На фиг. 2 приведен режим дач рычага управления по тангажу, показан пример отображения на экране информации о характеристиках устойчивости и управляемости ВС на АРМ анализа динамики полета пункта наблюдения.
В левой части показаны параметры продольного канала динамики полета ВС в виде графиков параметров по времени:
- изменение отклонения рычага управления двигателем ВС, РУД % (22), приборная скорость Vпр (31);
- изменение отклонения руля высоты, DBo - δв, (23) и отклонение рычага управления по тангажу Хв, мм (24), перегрузка nу (32);
- углы атаки α (27) и тангажа ϑ (26), угловая скорость ωz (25).
Показано изменение параметров движения ВС при выполнении дач рычага управления по тангажу Хв: изменение угловой скорости тангажа ωz (25); ТЕТ-изменение по времени угла тангажа ϑ (26); ALF- изменение угла атаки α по времени (27);
В правой части экрана - результаты вторичной обработки в реальном времени в виде графиков параметра по параметру: фактическая зависимость коэффициента подъемной силы от угла атаки Cy=f(α) (33) на фоне расчетных и продувочных зависимостей для различных вариантов конфигурации ВС (посадочная - 29, взлетно-посадочная - 28, полетная для разных чисел М полета - 30); в отдельных окнах - балансировочные зависимости по скорости полета δв, φст=f(Vпр) из режимов разгоны-торможения и по перегрузке δв, φст=f(ny, Су), где δв - отклонение руля высоты, φст - отклонение стабилизатора. На экране также отображается конфигурация ВС (положение шасси и механизации), в числовом виде отображаются основные параметры, подлежащие контролю в процессе выполнения режима (высота, скорость, угол атаки и др.). Близкое совпадение расчетных и экспериментальных кривых Cy=f(α) позволяет сделать вывод о соответствии опытного ВС расчетным (требуемым) характеристикам, по наклону балансировочных кривых можно судить об устойчивости ВС по скорости и перегрузке.
На АРМ анализа системы управления на пункте наблюдения отображаются в дополнение к параметрам системы управления, полученным с борта ВС, также и параметры сопровождающего моделирования системы управления 20 и отдельных ее подсистем, выполняется сравнение результатов моделирования в блоке 21 при подаче на вход модели реальных управляющих воздействий, полученных в телеметрической информации с борта ВС, с поступающими на второй вход блока 21 реальными выходными параметрами системы управления. Для моделирования системы управления используются либо блок математического моделирования 20 либо специальный моделирующий стенд, включающий реальные блоки системы управления, на вход которого подаются управляющие параметры (отклонение ручки/штурвала управления Хв, Хэ, педалей Хн, кранов выпуска механизации и т.д.) и параметры полета (высота Н, скорость Vпр и т.д.), поступающие с борта ВС (фиг. 3). Отдельные параметры системы и/или результаты моделирования отклонений руля высоты, элеронов, направления δвм, δэм, δнм сравниваются с измеренными в полете ВС отклонениями δв, δэ, δн, определяются погрешности Δδв, Δδэ, Δδн и в соответствии с заранее подготовленным заданием передаются через блок вторичной обработки 19 на АРМ анализа системы управления 18 и на ПУЛЭ 12 по линии связи и поступают на вход вычислительного комплекса отображения и управления ПУЛЭ.
На АРМ контроля силовой установки, размещенного, например, на летной станции КБ-разработчика ВС, можно более подробно, чем на ПУЛЭ, проанализировать работу силовой установки, а также смежных систем: топливной и масляной системы, системы контроля и управления двигателем, оценивать характеристики газодинамической устойчивости двигателя, за счет обеспечения возможности наблюдения и анализа полетной информации с использованием дополнительных средств, таких как расширенный состав блоков вторичной обработки на АРМ пунктов наблюдения и анализа, средств математического и полунатурного сопровождающего моделирования, в том числе пилотажных моделирующих стендов, стендов для отработки систем ВС, что позволяет сократить время межполетной обработки и анализа информации, сокращаются сроки летных испытаний и при этом повышается их информационная эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| СИСТЕМА СБОРА И ОБРАБОТКИ ПОЛЁТНОЙ ИНФОРМАЦИИ ПРИ ПРОВЕДЕНИИ ЛЁТНЫХ ИСПЫТАНИЙ ЦИФРОВЫХ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОГО ДВОЙНИКА | 2023 |
|
RU2799904C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| Многоцелевой резервный контур взаимодействия "лётчик-самолет" для лётных испытаний высокоавтоматизированных и беспилотных авиационных комплексов | 2020 |
|
RU2743236C1 |
| КИБЕРФИЗИЧЕСКАЯ СИСТЕМА ИССЛЕДОВАНИЯ ЛЁТНО-ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2804548C1 |
| Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления | 2022 |
|
RU2786280C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УПРАВЛЕНИЯ ПОЛЕТАМИ КОСМИЧЕСКИХ АППАРАТОВ | 2010 |
|
RU2438941C1 |
| Многофункциональный центр управления движением и моделирования динамики летательных аппаратов | 2017 |
|
RU2646784C1 |
Изобретение относится к области измерительной техники для обеспечения летных испытаний, исследований воздушных судов (ВС) и их систем и может быть использована для контроля и управления ходом испытательного (исследовательского) полета ВС. Техническим результатом является повышение эффективности летных испытаний. В систему обработки и анализа полетной информации в реальном времени и управления летным экспериментом дополнительно введена распределенная система обработки и анализа полетной информации в реальном времени, размещенная в пунктах наблюдения, распределенных по летно-испытательным подразделениям конструкторских бюро, проводящих испытания, содержащих ЛВС, в состав которой входят АРМ специалистов группы обработки и анализа информации, блоки вторичной обработки результатов измерений, математического и/или полунатурного моделирования, блоки сравнения результатов сопровождающего моделирования с данными летных испытаний, образующие вычислительный комплекс обработки, отображения и анализа параметров ВС и/или бортовых систем. 3 ил.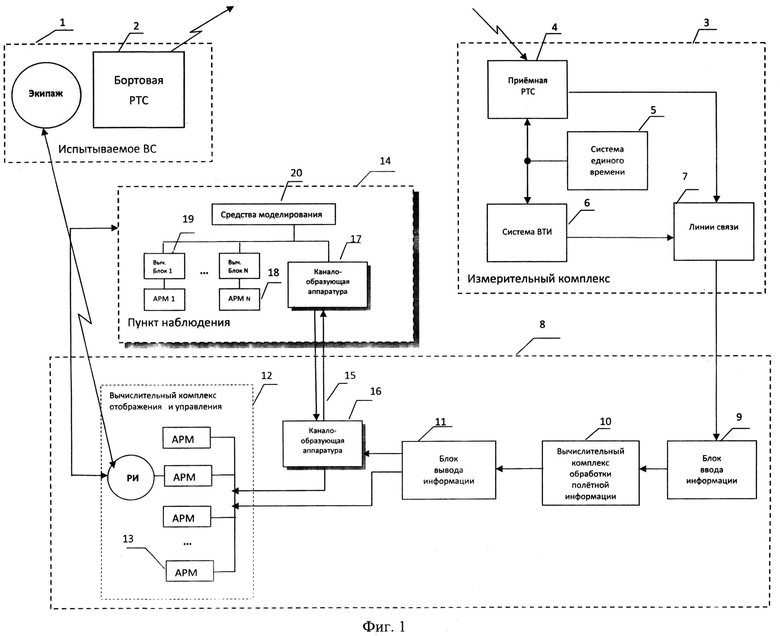
Система обработки и анализа полетной информации в реальном времени и управления летным экспериментом, содержащая систему управления летным экспериментом, включающую бортовую систему радиотелеметрических измерений (РТС), наземный измерительный комплекс (ИК), содержащий приемные станции РТС, систему внешнетраекторных измерений (ВТИ), систему единого времени (СЕВ), соединенную со входами РТС и системы ВТИ, линии связи, соединенные с выходами системы ВТИ и приемных РТС; пункт управления летным экспериментом (ПУЛЭ), в состав которого введены последовательно соединенные блок ввода информации, вход которого соединен с выходом линии связи, вычислительный комплекс, включающий локальную вычислительную сеть автоматизированной обработки полетной информации в реальном времени, блок вывода информации, второй вычислительный комплекс, объединенный в локальную вычислительную сеть (ЛВС) отображения и управления, в состав которого входят автоматизированные рабочие места (АРМ) руководителя испытаний и специалистов группы управления, а также средства радиосвязи с экипажем испытываемого ВС и оперативно-командной связи со средствами ИК, отличающаяся тем, что дополнительно введена распределенная система обработки и анализа полетной информации в реальном времени, размещенная в пунктах наблюдения, распределенных по летно-испытательным подразделениям конструкторских бюро, проводящих испытания, содержащих ЛВС, в состав которой входят АРМ специалистов группы обработки и анализа информации, снабженные телефонной связью с ПУЛЭ, блоки вторичной обработки результатов измерений, математического и/или полунатурного моделирования, блоки сравнения результатов сопровождающего моделирования с данными летных испытаний, образующие вычислительный комплекс обработки, отображения и анализа параметров ВС и/или бортовых систем, входы которых связаны со вторым выходом блока вывода информации вычислительного комплекса обработки полетной информации ПУЛЭ с помощью дуплексной линии связи и установленной на обоих концах ее каналообразующей аппаратуры, а выход блока сопровождающего моделирования через блок сравнения связан с входами блока вторичной обработки результатов измерений и со вторым входом вычислительного комплекса отображения и управления ПУЛЭ, выходы блока вторичной обработки результатов измерений соединены со вторым входом вычислительного комплекса отображения и управления ПУЛЭ и с входом вычислительного комплекса отображения на экране АРМ анализа информации.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Солесос | 1922 |
|
SU29A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

