Изобретение относится к средствам обеспечения лётных испытаний, а именно к средствам взаимодействия «лётчик-самолет» в лётных экспериментах, и предназначено для оснащения самолетов - летающих лабораторий, опытных пилотируемых и беспилотных летательных аппаратов.
Многоцелевой резервный контур взаимодействия «лётчик-самолет» - модульный съемный комплекс, который служит технической базой реализации эргономических требований к технологии лётных испытаний, определяемых спецификой испытываемых высокоавтоматизированных и беспилотных авиационных систем (АС) как объектов управления, а также общими особенностями лётно-испытательной деятельности, в том числе:
- повышенной вероятностью отказов и проявления неизвестных свойств ЛА в испытательных полетах,
- новыми видами отказов высокоавтоматизированных и беспилотных АС, не поддерживаемыми стандартным человеко-машинным интерфейсом,
- отсутствием интеграции опытных БПЛА и наземных пунктов управления БПЛА в технологию управления лётным экспериментом,
- отсутствием специализированных средств оценки и доводки средств взаимодействия «лётчик-самолет» на рабочем месте лётчика-испытателя.
В целом, по сравнению с эксплуатационным полетом в штатных и нештатных условиях в испытательных полетах лётчику требуется большее количество измеряемых и индицируемых параметров, дополнительные алгоритмы обработки и форматы представления данных, дополнительные средства воздействия на объект управления, в том числе резервные средства отображения информации и резервные контуры управления.
Актуальной технической проблемой совершенствования технологии лётных испытаний является обеспечение безопасности испытательных полетов при отказах авионики «Стеклянных кабин» и электродистанционной системы управления («блэк-ауты»), отказах автопилота и каналов связи с беспилотником, повышение эффективности деятельности лётчика-испытателя при работе в нестандартных ситуациях и отработке технологий взаимодействия «экипаж-автоматика», дистанционного управления БПЛА, совмещенного управления ЛА и ведомым БПЛА.
Известен беспилотный вертолет - летающая лаборатория ARTIS (Autonomous Rotorcraft Test bed for Intelligent Systems) (Johann C. Dauer, «Flight Testing of an Unmanned Aircraft System - A Research Perspective»/Conference Paper. STO-MP-SCI-269), предназначенная для лётных испытаний технологий автономного беспилотного ЛА с элементами искусственного интеллекта, состоящая из нескольких платформ (беспилотных вертолетов различных размеров), наземного пункта управления лётным экспериментом в DLR (Германия), моделирующего комплекса для доводки и предполетной проверки технических решений и компонентов ЛЛ; решающая задачи отработки технологий внешнего контроля и дистанционного управления автономным БПЛА и его оборудованием, включая человеко-машинный интерфейс наземных станций. Особенностью вертолета-летающей лаборатории (ЛЛ) является независимый от основного комплекса авионики резервный контур дистанционного управления, позволяющий резервирующему пилоту на наземной станции вмешиваться в управление автоматическим полетом БПЛА, а также отрабатывать отдельные элементы технологий автономного полета в ручном режиме.
Данная конфигурация испытательного оборудования относится к области испытаний БПЛА и не решает задачи оснащения пилотируемых ЛЛ и опытных ЛА.
Известны технологии и съемные универсальные комплекты переоборудования ЛА различных категорий в опционально пилотируемый ЛА (OPV Conversion Kit), для ЛА с гибридной системой управления, работающей в трех режимах - ручного управления, автоматического полета, дистанционного управления; в состав комплекта входят: вычислитель, поддерживающий различные автоматизированные режимы полета, блок активации/деактивации режима дистанционного управления, система датчиков, приемопередающий модуль.
Данные модифицированные ЛА с гибридной СУ, ранее применявшиеся в качестве самолетов-мишеней и средств лётной подготовки на одноместных самолетах, в настоящее время активно используются в качестве ЛЛ с резервирующим пилотом на борту для доводки технологий автономного полета и дистанционного управления БПЛА в лётном эксперименте (например, Цессна-182 ЛЛ в качестве «суррогатного БПЛА» для доводки технологий БПЛА MQ-1, https://www.uasvision.com/2016/01/29/the-surrogate-predator-program).
Эта группа технических решений оснащения ЛА предполагает интеграцию канала дистанционного управления в основной комплекс бортового оборудования и не решает проблемы резервного контура управления в кабине ЛА при полном отказе авионики, а также проблемы средств дистанционного управления ведомым БПЛА, предоставления дополнительного информационного обеспечения лётчика-испытателя.
Известен вариант реализации комплекса дистанционного управления БПЛА из кабины вертолета, разрабатываемого фирмой Kutta technologies по программе SCORCH (комплекс обеспечения взаимодействия MUM-T Kit) (Taylor, G., & Turpin, Т. (2015). Army Aviation Manned-Unmanned Teaming (MUM-T): Past, Present, and Future. 18th International Symposium on Aviation Psychology, 560-565. htps://corescholar.libraries.wright.edu/isap_2015/12). Данный вариант интерфейса с БПЛА объединяет компьютер и дисплей системы вооружения вертолета с отдельным информационно-управляющим модулем формата планшетного компьютера и предназначен для управления 2-3 БПЛА.
Его основным недостатком является зависимость от бортовой системы измерений, а также ориентированность технического решения на рабочее место стрелка боевого вертолета, не предусматривающая задачи обеспечения совмещенного управления ЛА и БПЛА.
Известен ряд изобретений, относящихся к комплексу бортовых траекторных измерений, предназначенных для лётных испытаний.
Многофункциональный комплекс бортовых измерений (патент RU 2543943, опубл. 10.03.2015, Бюл. №7) применяется в системах обеспечения лётных испытаний пилотажно-навигационного оборудования ЛА. Техническим результатом является повышение эффективности лётных испытаний. В многофункциональный комплекс бортовых траекторных измерений (КБТИ) входит многочастотный приемник СНС; блок синхронизации параметров бортовых систем с параметрами траекторного движения ЛА и формирования текущих значений по Гринвичскому времени; экспертная система автоматизированного анализа погрешностей и определения характеристик бортового оборудования, блоком объяснений, приобретения знаний, выходы которых связаны с системой отображения информации (СОИ). СОИ предназначено для экспериментатора - оператора КБТИ, анализирующего данные.
Известно устройство обеспечения лётных испытаний перспективных комплексов бортового оборудования, построенных на принципах модульной авионики, содержащее измерительную систему, вычислитель, имеющие каналы связи с бортовыми системами оборудуемого самолета и с наземным комплексом (патент на полезную модель RU 112565, опубл. 10.01.2012, Бюл. №1).
При создании вышеуказанных систем обеспечения лётных испытаний не ставилось отдельной задачи обеспечения лётчика-испытателя дополнительными каналами управления ЛА, в том числе дистанционного, а также дополнительными системами представления информации, не стояла также задача реализации независимого питания бортового комплекса для автономного функционирования в случае отказа основного комплекса авионики.
Известна летающая лаборатория, предназначенная для отработки элементов беспилотных авиационных систем, включающая вертолет опционально-пилотируемого типа, система управления которого оснащена приемопередающими устройствами. Данное изобретение выбрано в качестве прототипа (Патент RU 2605801, «Интерпретатор полета для демонстрации беспилотных авиационных систем с внешней подвеской», опубл. 27.12.2016, патент US 8897931 25.11.2014).
Представленная в данном патенте относится к испытательной системе для беспилотных авиационных систем (БАС) с внешней подвеской. Система для проведения испытаний БАС содержит систему управления полетом БАС, опционально пилотируемый летательный аппарат (OPV) с собственной системой управления, интерпретатор сигналов управления полетом. Для проведения испытаний элементов БАС прикрепляют фюзеляж БАС к OPV, соединяют систему управления полетом БАС с интерпретатором управления полетом, соединяют последний с системой управления полетом OPV, инициируют профиль полета БАС, подают управляющие параметры от системы управления полетом БАС в интерпретатор управления полетом для их модификации в целях моделирования с помощью ЛЛ профиля полета БАС.
Основным недостатком оснащения вышеописанной опционально-пилотируемой ЛЛ, предлагаемой к использованию в качестве модели БАС для отработки технологий дистанционного управления в лётном эксперименте, с точки зрения обеспечения деятельности лётчика-испытателя является отсутствие технических средств реализации функций резервного канала управления и дополнительного информационного обеспечения пилота опционально-пилотируемой ЛЛ, а также средств отработки взаимодействия ЛЛ с ведомым БПЛА.
Технический результат, на достижение которого направлено изобретение, заключается в повышении безопасности и эффективности лётных испытаний высокоавтоматизированных и беспилотных авиационных систем в условиях отказов авионики и неопределенности функционирования опытных систем, а также при решении задач отработки элементов БПЛА и доводки средств взаимодействия «экипаж-автоматика», «внешний экипаж-БПЛА», «пилот ЛА-ведомый БПЛА» за счет расширения комплекса средств взаимодействия «лётчик-самолет» в лётном эксперименте, находящихся на рабочем месте лётчика-испытателя и внешнего экипажа БПЛА.
Указанный результат достигается тем, что на борт самолетов-летающих лабораторий (ЛЛ), опытных ЛА и БПЛА на период лётных испытаний устанавливается многоцелевой резервный контур взаимодействия «лётчик-самолет» в лётном эксперименте, состоящий из бортовой и наземной частей, встроенный в технологию управления лётным экспериментом, включая функцию дистанционного управления летательными аппаратами, при этом многоцелевой резервный контур выполнен из совместимых компонентов, используемых в различных комбинациях для оснащения ЛЛ, опытных ЛА и БПЛА, и работает параллельно основному бортовому оборудованию благодаря собственным средствам измерения, системе питания, съемным сервомоторам, соединенным с основными исполнительными механизмами ЛА, а также создает техническую базу дополнительного информационно-управляющего поля на рабочем месте лётчика-испытателя в бортовом варианте и экспериментальное рабочее место внешнего экипажа в наземном варианте в составе пункта управления лётным экспериментом (ПУЛЭ), предусматривающее возможность реконфигурации и подключения различных вариантов интерфейса для отработки технологий взаимодействия «лётчик-самолет».
Для этого в многоцелевом резервном контуре взаимодействия «лётчик-самолет» для лётных испытаний высокоавтоматизированных и беспилотных авиационных комплексов, состоящем из бортовой части с вычислительным модулем, блоком приемопередатчиков и наземной части, вычислительный модуль бортовой части выполняется со встроенными в него датчиками, независимыми от бортовой системы измерений и устанавливается в многослотовом съемном корпусе, обеспечивающем монтаж в кабине летательного аппарата любого типа. Вычислительный модуль соединяется с блоком отображения, выполненным в виде портативного дисплея с подключаемым дополнительно шлемом виртуальной реальности, к которому также возможно подключение экспериментальных блоков управления и индикации, блоков измерения параметров действий и физиологических реакций лётчика. На каждом органе управления ЛА (управления двигателем, рулями, шасси) устанавливается отдельный преобразователь перемещения органов управления ЛА в электрический сигнал, который с преобразователя поступает непосредственно на вычислительный модуль и через вычислительный модуль на сервомоторы, соединенные с рулями и двигателем, обеспечивая высокий уровень безопасности ЛА при любых отказах штатного и экспериментального оборудования ЛА.
Информационно-управляющая консоль соединяется с вычислительным модулем с целью управления режимами работы вычислительного модуля, режимами отображения информации на блоке отображения и управления ведомым испытываемым беспилотным ЛА, при этом информационно-управляющая консоль выполнена с возможностью подключения к ней экспериментальных блоков управления БПЛА, в том числе, трехмерной мыши, жестового контроллера.
Также в бортовой части многоцелевого конура устанавливаются:
- набор сервомоторов, каждый из которых подключается к своему органу управления ЛА
- двигателю, рулям, шасси;
- блок приемопередатчиков, обеспечивающий телеметрическую связь - обмен данными и передачу управляющих сигналов - между бортовой частью пилотируемого летательного аппарата, преобразованного в летающую лабораторию (ЛЛ), ведомого испытываемого БПЛА, опытного испытываемого ЛА и наземным пунктом управления (НПУ) наземной части;
- тумблер для отключения дистанционного управления с НПУ из кабины ЛЛ при вмешательстве в управление резервирующего пилота ЛЛ.
При этом преобразователь, вычислительный модуль и сервомоторы каждый подключены к собственным автономным блокам питания, независимым от бортового блока питания.
В наземной части многоцелевого резервного контура взаимодействия «лётчик-самолет» на пункте управления лётным экспериментом (ПУЛЭ) устанавливается наземный пункт управления (НПУ), содержащий реконфигурируемое экспериментальное место внешнего экипажа и блок приемопередатчиков для обеспечения телеметрической связи с блоком приемопередатчиков на бортовой части;. При этом реконфигурируемое экспериментальное место внешнего экипажа содержит вычислительный модуль, к которому подключены дисплей с сенсорным экраном, и испытываемые, в том числе альтернативные, органы управления ЛА, акустический интерфейс «лётчик-самолет».
Описание чертежей
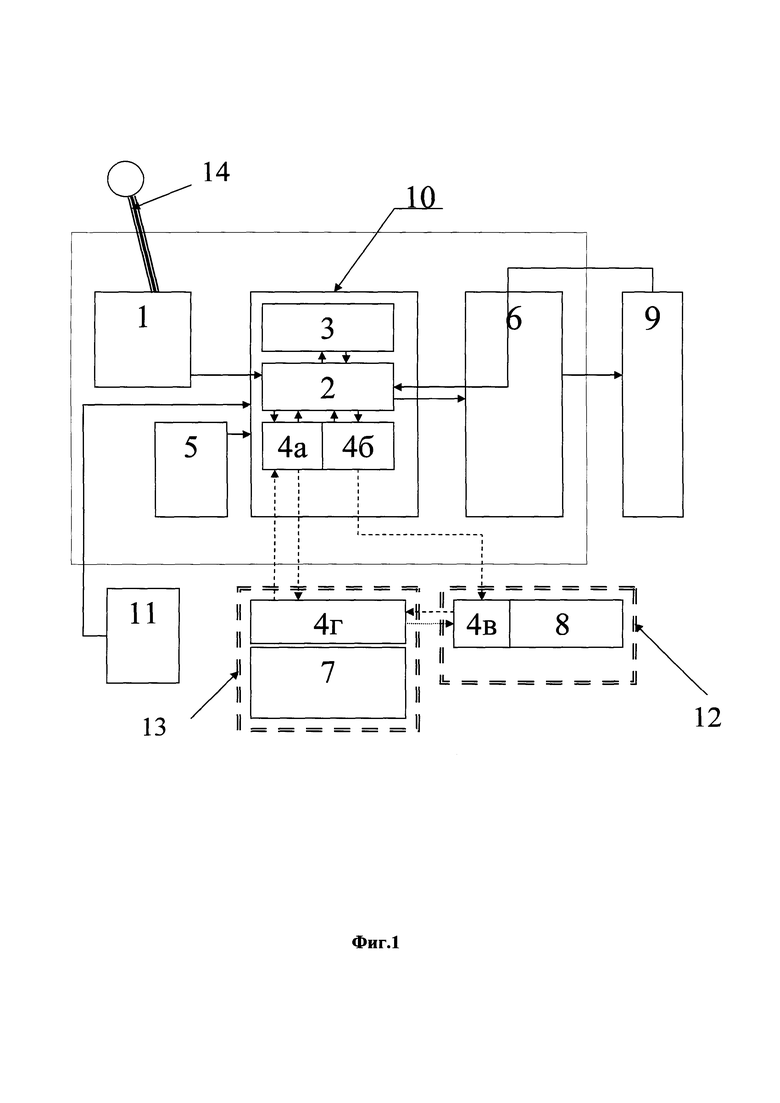
На фиг. 1 представлена структурная схема многоцелевого резервного контура взаимодействия «лётчик-самолет» для лётных испытаний высокоавтоматизированных и беспилотных авиационных комплексов.
В состав многоцелевого резервного контура взаимодействия «лётчик-самолет» входят автономная бортовая часть и наземная часть, интегрированная в ПУЛЭ.
Бортовая часть содержит преобразователь 1 перемещения органов управления 14, находящихся в кабине ЛЛ и опытного ЛА, в электрический сигнал. Преобразователь 1 связан с вычислительным модулем 2 в режиме резервного внутрикабинного электродистанционного управления.
Вычислительный модуль 2 выполнен со встроенными в плату датчиками, имеет вход для карты памяти и USB входы, панели для подключения бортовой измерительной системы 11 и соединен со съемным блоком отображения информации (дисплей с сенсорным экраном). Вычислительный модуль 2, блок отображения информации 3, автономный блок питания модуля 2 (не показан) и блоки приемопередатчиков 4а, 4б установлены в многослотовом корпусе 10.
Сигналы, формируемые модулем 2, поступают на блок сервомоторов 6, регулирующих отклонение рулей, режим работы двигателей, выпуск/уборку шасси 9.
Информационно-управляющая консоль открытой архитектуры 5 сопряжена с вычислительным модулем 2 и управляет режимами его работы.
Бортовая часть испытываемого ведомого БПЛА 12 содержит упрощенный комплект многоцелевого резервного контура взаимодействия «лётчик-самолет» 8 и блок приемопередатчиков 4в.
Наземная часть многоцелевого резервного контура взаимодействия «лётчик-самолет», обеспечивающая дистанционное управление опытным БПЛА, ЛЛ - имитатором БПЛА, опытным ЛА при отказе авионики, содержит наземный пункт управления лётным экспериментом 13 (НПУ) с реконфигурируемым экспериментальным рабочим местом внешнего экипажа 7 и блоком приемопередатчиков 4г.
Описание работы многоцелевого резервного контура взаимодействия «лётчик-самолет».
Предусмотрены три основных варианта реализации многоцелевого резервного контура взаимодействия «лётчик-самолет»: 1 - конверсия пилотируемого ЛА в опционально-пилотируемую летающую лабораторию; 2 - оснащение опытного ЛА; 3 - оснащение опытного БПЛА.
1. Оснащение опционально-пилотируемого самолета - ЛЛ (самолета с гибридной СУ).
В результате установки на ЛА бортовой части многоцелевого комплекса появляются дополнительные функциональные возможности дооборудованного ЛА, средства отработки технологий дистанционного управления и элементов БПЛА; средства информационного обеспечения лётчика-испытателя в задачах исследования свойств объекта управления и режимов взаимодействия «лётчик-самолет»; резервное управление и информационное обеспечение лётчика-испытателя в кабине ЛЛ; резервный канал связи ЛЛ с пунктом управления лётным экспериментом; резервные средства информационного обеспечения. Для реализации данного варианта реализации:
1. В кабину самолета любого типа с любой системой управления (механической, электродистанционной и т.д.) устанавливается многослотовый корпус 20 с вычислительным модулем 2 и независимым блоком питания.
2. Вычислительный модуль 2 соединяется через блок сервомоторов 6 с рулями, двигателем 9, с рычагами управления в кабине 14 через преобразователь 1 механического движения в электрический сигнал.
3. К вычислительному модулю 2 внутри корпуса 10 подсоединяются блоки приемопередатчиков 4а, 4б, поддерживающие радиосвязь с внешними приемопередающими устройствами.
4. К вычислительному модулю 2 подсоединяется малогабаритный сенсорный дисплей (блок отображения 3) либо внутри корпуса, либо на свободном пространстве рабочего места в зоне обзора с помощью отдельного комплекта креплений (не показаны); дисплей может быть заменен или дополнен шлемом BP (виртуальной реальности).
5. К вычислительному модулю 2 подсоединяется информационно-управляющая консоль 5, обеспечивающая управление режимами модуля 2, режимами отображения информации на дисплее, а также управление полетом ведомого БПЛА. Информационно-управляющая консоль, имеющая открытую архитектуру, позволяет подключать к бортовому многоцелевому комплексу в базовой комплектации через USB-разъемы экспериментальные средства управления движением БПЛА (трехмерную «воздушную мышь», жестовый контроллер углового положения и траекторного движения ЛА и т.д.).
6. Бортовой комплект блоков приемопередатчиков 4а, 4б, через телеметрическую связь соединяется с наземной частью многоцелевого резервного контура взаимодействия «лётчик-самолет» - НПУ, интегрированную в пункт управления лётным экспериментом.
7. Вычислительный модуль 2 бортовой части многоцелевого конутра обеспечивает работу в нескольких режимах, переключаемых с помощью информационно-управляющей консоли 5, сенсорного экрана блока отображения информации 3, тумблера отключения дистанционного управления с наземного НПУ из кабины ЛЛ при вмешательстве в управление резервирующего пилота ЛЛ (не показан).
Предусмотрены следующие режимы работы бортовой части.
Нулевой режим - отключение резервного контура взаимодействия «лётчик-самолет».
Режим 1 - дистанционное управление ЛЛ с НПУ, информационное обеспечение контроля дистанционно-управляемого полета ЛЛ со стороны резервирующего лётчика на борту ЛЛ.
Режим 2 - резервное электродистанционное управление ЛЛ от рычагов в кабине при отказах и имитации отказа СУ ЛЛ.
Режим 3 - резервное информационное обеспечение пилота ЛЛ при отказах и имитации отказа авионики «Стеклянной кабины».
Режим 4 - информационное обеспечение исследовательского полета при решении задач изучения свойств объекта управления и отработки режимов взаимодействия «лётчик-самолет».
Режим 5 - совмещенное управление ЛЛ и ведомым БПЛА; в качестве ведомого БПЛА могут применяться виртуальные БПЛА, опытные БПЛА с установленными на них упрощенными комплектами многоцелевого контура, второй самолет - ЛЛ с полным комплектом многоцелевого контура, выполняющий функцию имитатора ведомого БПЛА, дистанционное управление которым переключено с НПУ на ведущий самолет - ЛЛ.
Режим 6 - резервный канал передачи данных бортовой измерительной системы при отказе основного телеметрического канала ЛЛ.
8. Для обеспечения режима исследовательского полета (режима 4) и резервного канала телеметрии (режим 6) к вычислительному модулю 2 подключается система бортовых измерений 11. Режим 4 также позволяет подсоединять к модулю 2 альтернативные средства управления и индикации, средства измерения параметров действий и физиологических реакций лётчика.
9. Проверяется связь ЛЛ с наземным НПУ в составе ПУЛЭ, выбирается вариант настройки реконфигурируемого экспериментального рабочего места внешнего экипажа 7.
2. Оснащение опытного ЛА с ЭДСУ.
В результате установки на ЛА бортовой части многоцелевого комплекса появляются дополнительные функциональные возможности опытного ЛА: резервное управление и информационное обеспечение в кабине опытного ЛА; резервное дистанционное управление опытным ЛА; средства дистанционного управления ведомым БПЛА из кабины опытного ЛА; средства информационного обеспечения исследования свойств объекта управления и режимов взаимодействия «лётчик-самолет».
Повторяется процедура установки многоцелевого резервного контура взаимодействия «лётчик-самолет» на борт ЛЛ.
Бортовая часть многоцелевого резервного контура на борту опытного ЛА работает в следующих режимах:
Нулевой режим - отсоединение комплекса и переход на основные каналы управления и информационного обеспечения.
Режим 1 - резервное дистанционное управление опытным ЛА с НПУ при отказе ЭДСУ
Режим 2 - резервное электродистанционное управления опытным ЛА с рычагов управления в кабине при отказе ЭДСУ.
Режим 3 - резервное информационное обеспечение лётчика при отказе оборудования «Стеклянной кабины».
Режим 4 - взаимодействие опытного ЛА с ведомым БПЛА через информационно-управляющую консоль.
Режим 5 - исследовательский полет при решении задач изучения свойств объекта управления и отработки режимов взаимодействия «лётчик-самолет».
3. Оснащение опытного БПЛА.
В результате установки бортовой части многоцелевого комплекса появляются дополнительные функциональные возможности опытного БПЛА: связь с ПУЛЭ; резервный контур дистанционного управления; средства отработки режимов взаимодействия «внешний экипаж - БПЛА».
На борту опытного БПЛА параллельно основному контуру дистанционного управления устанавливается многоцелевой контур взаимодействия «лётчик-самолет» в минимальной комплектации 8, включающей вычислительный модуль с независимой системой измерений, реализуемой встроенными датчиками (не показан), блок приемопередатчиков 4в для связи с НПУ и воздушным пунктом управления ведущего ЛА и блок сервомоторов (не показаны). Многоцелевой контур работает в следующих режимах.
Режим 1- резервное дистанционное управление БПЛА с НПУ в составе ПУЛЭ при отказе основного канала управления.
Режим 2 - отработка средств взаимодействия «внешний экипаж - БПЛА» на основе реконфигурируемого экспериментального рабочего места внешнего пилота в составе ПУЛЭ.
Режим 3 - полет в качестве ведомого БПЛА во взаимодействии с опытным ЛА или ЛЛ.
Примеры реализации изобретения
Пример 1.
Многоцелевой резервный контур может быть использован для проведения лётных исследований технологии дистанционного управления БПЛА на борту легкого самолета типа Цессна (первый вариант реализации). Для этого выполняется следующая последовательность шагов:
Шаг 1. В кабине легкого самолета перед приборной доской размещается малогабаритный многослотовый корпус 10 с основными элементами многоцелевого контура (вычислительным модулем 2, съемным дисплеем 3, блоком приемопередатчиков 4а, 4б). С помощью кабеля многослотовый корпус 10 подсоединяется к группе блоков сервомоторов 6, устанавливаемых за приборной доской и имеющих выход на управляющие поверхности (руль высоты, руль направления, элероны и т.д.) и систему управления двигателем 9. Модернизированный таким образом легкий самолет может управляться дистанционно.
Шаг 2. На ПУЛЭ развертывается экспериментальный наземный пункт управления 13, включающий экспериментальное рабочее место внешнего пилота 7 и блок приемопередатчика 4 г, обеспечивающий канал связи НПУ с блоком приемопередатчиков на борту ЛЛ. Реконфигурируемое экспериментальное рабочее место внешнего пилота 7 позволяет подключать альтернативные органы управления БПЛА, изменять и дополнять информационные поля, подключать акустический интерфейс «лётчик-самолет».
Шаг 3. Осуществляется наземная проверка каналов связи «экспериментальный НПУ - ЛЛ».
Шаг 4. В полете пилот ЛЛ, выполняющий функцию резервирующего лётчика в режиме дистанционного управления ЛЛ с наземного пункта управления, по команде с ПУЛЭ через сенсорный экран дисплея (или другие дублирующие управляющие средства) переключает управление ЛЛ на дистанционное управление с НПУ, реализуемое внешним пилотом на ПУЛЭ. В режиме контроля процесса внешнего управления ЛЛ резервирующий лётчик на борту ЛЛ получает информацию о режиме, выполняемом внешним пилотом с НПУ, выводимую на экран дисплея.
Шаг 5. В случае возникновения затруднений с дистанционным управлением ЛЛ, включая отсутствие связи между НПУ и ЛЛ, резервирующий лётчик возвращает управление ЛЛ в режим прямого пилотирования путем нажатия сенсорной кнопки дисплея.
Пример 2.
Многоцелевой резервный контур взаимодействия «лётчик-самолет» может применяться для отработки взаимодействия ЛА и ведомого БПЛА, включая передачу управления ведомым БПЛА от ведущего ЛА к наземному НПУ. Вариант лётных испытаний на базе двух самолетов ЛЛ, оснащенных предложенным комплексом, включает следующие действия.
Шаг 1. Самолет-ЛЛ, выполняющий функцию ведущего самолета, оснащается по алгоритму, указанному в примере 1, дополнительно к многослотовому корпусу 10 подсоединяется информационно-управляющая консоль 5, включается блок приемопередатчиков 4б для телеметрической связи с блоком приемопередатчиков 4в, расположенном на ведомом БПЛА (ЛЛ-имитаторе ведомого БПЛА).
Шаг 2. Самолет-ЛЛ, выполняющий функцию ведомого БПЛА, оснащается согласно процедуре, описанной в первом примере.
Шаг 3. Выполняется наземная проверка каналов телеметрической связи «ЛЛ-имитатор БПЛА» и «НПУ-имитатор БПЛА».
Шаг 4. Осуществляется взлет ведущего самолета-ЛЛ и ЛЛ-имитатора ведомого БПЛА в ручном режиме и выход в зону. Во время полета в зону на дисплей 3 многоцелевого контура в кабине обоих самолетов-ЛЛ выводится информация об их взаимном расположении и других полетных параметрах.
Шаг 5. В зоне испытательного полета лётчик ведущего самолета-ЛЛ переводит информационно-управляющую консоль 5 на борту в режим дистанционного управления ведомым БПЛА через подсистему приемопередатчиков 46. При этом ЛЛ-имитатор БПЛА переводится в режим дистанционного управления, осуществляемого через приемопередатчик 4в. Резервирующий лётчик на борту ЛЛ-имитатора БПЛА может в любое время перейти на ручное управление ЛЛ путем переключения режимов управления на сенсорном экране дисплея 3 или с помощью других альтернативных переключателей режимов.
Пример 3.
Проведение лётных испытаний опытных БПЛА в составе ПУЛЭ.
Шаг 1. Упрощенный комплект 8 бортовой части многоцелевого резервного контура взаимодействия «лётчик-самолет», включающий многослотовый корпус 10 с вычислительным модулем, блоком приемопередатчиков 4а и блоком сервомоторов 6, соединяемых с рулями, двигателем, шасси 9 опытного БПЛА, устанавливается параллельно основному контуру дистанционного управления опытного БПЛА.
Шаг 2. Наземный пункт управления 13 в составе ПУЛЭ настраивается на дистанционное управление опытным БПЛА 12, включая настройку блока приемопередатчиков 4г и реконфигурируемого рабочего места внешнего пилота 7.
Шаг 3. При отработке технологии дистанционного управления, включая доводку рабочего места внешнего экипажа, управление опытным БПЛА переключается на резервный контур взаимодействия «внешний пилот - БПЛА» со штатного контура управления опытного образца беспилотной авиационной системы, включающего канал телеметрической связи со штатным НПУ и сам штатный НПУ.
Шаг 4. При отказе основного контура дистанционного управления опытного БПЛА в испытательном полете предложенный многоцелевой контур работает в качестве резервного канала дистанционного управления и передачи данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| Летающая лаборатория с реконфигурируемым рабочим местом лётчика-испытателя для опережающих лётных исследований взаимодействия "экипаж-автоматика" и экипаж - БПЛА" | 2022 |
|
RU2795529C1 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МАЛОРАЗМЕРНОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2820041C1 |
| СПОСОБ ДИСТАНЦИОННОЙ КОРРЕКЦИИ ПОЛЕТНОГО ЗАДАНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2755411C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| Бортовая интеллектуальная система поиска и наведения беспилотного летательного аппарата | 2023 |
|
RU2819590C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ЕГО ОБЕСПЕЧЕНИЯ | 1999 |
|
RU2156720C1 |
Многоцелевой резервный контур взаимодействия «лётчик-самолет» для лётных испытаний высокоавтоматизированных и беспилотных авиационных комплексов содержит бортовую часть с вычислительным модулем, блоком приемопередатчиков и наземную часть. Вычислительный модуль установлен в многослотовом съемном корпусе в кабине летательного аппарата и соединен с блоком отображения, и содержит встроенные в него датчики, не зависимые от бортовой системы измерений, и соединен с блоком отображения, выполненным в виде портативного дисплея с подключаемым дополнительно шлемом виртуальной реальности, а также с возможностью подключения экспериментальных блоков управления и индикации, блоков измерения параметров действий и физиологических реакций лётчика. Бортовая часть содержит набор сервомоторов, каждый из которых подключается к своему органу управления ЛА. Наземная часть содержит наземный пункт управления (НПУ), содержащий реконфигурируемое экспериментальное место внешнего экипажа и блок приемопередатчиков для обеспечения телеметрической связи с блоком приемопередатчиков бортовой части. Обеспечивается безопасность испытательных полетов. 3 пр., 1 ил. 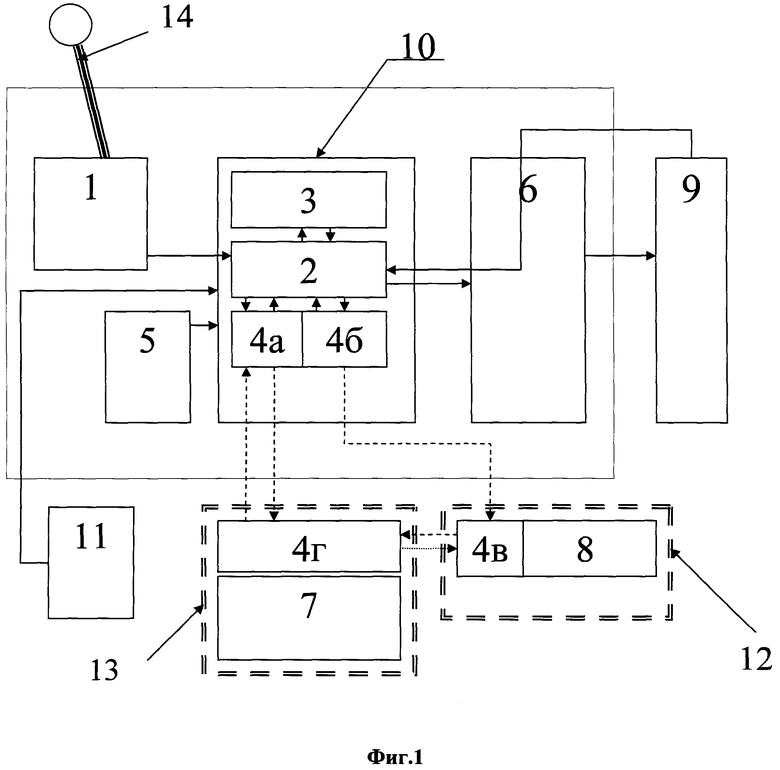
Многоцелевой резервный контур взаимодействия «лётчик-самолет» для лётных испытаний высокоавтоматизированных и беспилотных авиационных комплексов, состоящий из бортовой части с вычислительным модулем, блоком приемопередатчиков и наземной части, отличающийся тем, что
в бортовой части вычислительный модуль выполнен с встроенными в него датчиками, не зависимыми от бортовой системы измерений, при этом вычислительный модуль установлен в многослотовом съемном корпусе, обеспечивающем монтаж в кабине летательного аппарата любого типа;
вычислительный модуль соединен с блоком отображения, выполненным в виде портативного дисплея с подключаемым дополнительно шлемом виртуальной реальности, а также с возможностью подключения экспериментальных блоков управления и индикации, блоков измерения параметров действий и физиологических реакций лётчика;
на каждом органе управления ЛА для управления двигателем, рулями или шасси, установлен отдельный преобразователь перемещения органов управления ЛА в электрический сигнал, который с преобразователя поступает непосредственно на вычислительный модуль и через вычислительный модуль на сервомоторы, соединенные с рулями и двигателем, обеспечивая высокий уровень безопасности ЛА при любых отказах штатного и экспериментального оборудования ЛА;
информационно-управляющая консоль соединена с вычислительным модулем для управления режимами работы вычислительного модуля, режимами отображения информации на блоке отображения и управления ведомым испытываемым беспилотным ЛА, при этом информационно-управляющая консоль выполнена с возможностью подключения к ней экспериментальных блоков управления БПЛА, в том числе, трехмерной мыши, жестового контроллера;
также бортовая часть содержит:
- набор сервомоторов, каждый из которых подключается к своему органу управления ЛА - двигателю, рулям, шасси;
- блок приемопередатчиков, обеспечивающий телеметрическую связь - обмен данными и передачу управляющих сигналов - между бортовой частью пилотируемого летательного аппарата, преобразованного в летающую лабораторию (ЛЛ), ведомого испытываемого БПЛА, опытного испытываемого ЛА и наземным пунктом управления (НПУ) наземной части;
- тумблер для отключения дистанционного управления с НПУ из кабины ЛЛ при вмешательстве в управление резервирующего пилота ЛЛ;
при этом преобразователь, вычислительный модуль и сервомоторы каждый подключены к собственным автономным блокам питания, не зависимым от бортового блока питания;
в наземной части на пункте управления лётным экспериментом (ПУЛЭ) устанавливается наземный пункт управления (НПУ), содержащий реконфигурируемое экспериментальное место внешнего экипажа и блок приемопередатчиков для обеспечения телеметрической связи с блоком приемопередатчиков бортовой части;
при этом реконфигурируемое экспериментальное место внешнего экипажа содержит вычислительный модуль, к которому подключены дисплей с сенсорным экраном, испытываемые органы управления ЛА, акустический интерфейс «лётчик-самолет».
| СПОСОБ ИМИТАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ СИСТЕМЫ САМОНАВЕДЕНИЯ ПРИ ПРОВЕДЕНИИ ЛЕТНЫХ ИСПЫТАНИЙ | 2016 |
|
RU2636430C1 |
| WO 2017011075 A1, 19.01.2017 | |||
| Электромагнитный ключ для механической блокировки выключателя с разъединителями | 1955 |
|
SU103634A1 |
| US 20180218617 A1, 02.08.2018 | |||
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ЛЕТНОГО ЭКСПЕРИМЕНТА | 2010 |
|
RU2460112C1 |

