Заявленное изобретение относится к информационным системам в области создания, испытаний и эксплуатации авиационной техники и может быть использовано для исследования летно-технических характеристик летательного аппарата с применением технологий киберфизических систем, путем управления информационными потоками и интеграцией вычислительных ресурсов в физические процессы производства, испытаний и эксплуатации летательного аппарата.
Развитие современных информационных технологий расширяет возможности применения компьютерного моделирования при решении задач разработки, производства, испытаний и эксплуатации авиационной техники. К таким задачам относится и исследование летно-технических характеристик летательного аппарата (ЛА). На этапе разработки технического предложения проводятся предварительные исследования различных аэродинамических схем и компоновок, оценивается возможность создания ЛА, удовлетворяющего заданным требованиям. К расчету основных летно-технических характеристик (ЛТХ) ЛА относят: диапазоны высот и скоростей, в которых возможен безопасный полет ЛА и выполнение определенных полетных заданий; дальность и продолжительность полета, радиус действия; маневренные характеристики (радиус и время установившегося виража, скороподъемность, время выполнения заданного маневра, потребный для маневра объем пространства и действующие при этом перегрузки и т.д.); взлетно-посадочные характеристики, куда входят скорость отрыва, посадочная скорость, длина разбега, длина пробега, взлетная дистанция, посадочная дистанция, характеристики прерванного и продолженного взлета, класс аэродрома базирования и др. Помимо этих показателей в ЛТХ также включают ряд других величин, отражающих условия эксплуатации самолета и не определяемых расчетами динамики полета. По мере разработки проекта и получения достоверной информации (продувки моделей в аэродинамической трубе, комплексные исследования на имитационных стендах, результаты натурных испытаний) расширяется круг задач динамики полета, усложняются математические модели.
В заявленном изобретении предлагается применить к исследованию ЛТХ ЛА технологии киберфизических систем на основе технологической платформы цифровых двойников.
Компьютерные модели становятся одной из форм представления результатов научно-исследовательской и проектно-конструкторской деятельности, активно используемых при создании наукоемкой продукции, к которой относится и авиастроение. Совершенствование вычислительных технологий, применяемых в авиации, идет по пути перехода от анализа отдельных конструктивных элементов к полномасштабному трехмерному анализу поведения летательного аппарата в целом, что позволило активно внедрять технологию цифровых двойников отдельных узлов, агрегатов и систем ЛА, которые по своим характеристикам применимы для всех этапов жизненного цикла ЛА. В соответствии с ГОСТ Р 57700.37-2021 под понятием «цифровой двойник» понимается система, состоящая из цифровой модели изделия и двусторонних информационных связей с изделием и его составными частями, а под цифровой моделью изделия - система математических и компьютерных моделей, а также электронных документов изделия, описывающая структуру, функциональность и поведение вновь разрабатываемого или эксплуатируемого изделия на различных стадиях жизненного цикла, для которой на основании результатов испытаний по ГОСТ 16504 оценена выполнимость предъявляемых к изделию требованиям.
Создание функционального цифрового двойника требует применения современных компьютерных средств и программных продуктов, позволяющих производить решение сопряженных трехмерных задач аэродинамики, гидродинамики, конвективного тепломассопереноса и прочности. Однако, создание цифрового двойника летательного аппарата является сверхсложной задачей, и, исходя из этого, в заявленном изобретении предлагается система, позволяющая синтезировать ЦД ЛА из цифровых двойников его составных частей (узлов, систем и агрегатов и т.д.). В соответствии с ГОСТ 2.101-2016 под понятием «составная часть изделия» (СЧ) понимается изделие, выполняющее определенные функции в составе другого изделия. СЧ может быть любым видом изделия по конструкторско-функциональным характеристикам (деталь, сборочная единица, комплекс и комплект). При этом важно обеспечить проверку адекватности модели реальным объектам, использующихся в виртуальных экспериментах - процедуру валидации (ГОСТ Р 57700.25-2020).
Обеспечение возможности синтеза цифрового двойника летательного аппарата (ЦД ЛА) из цифровых двойников его составных частей (ЦД СЧ ЛА) состоит в технической возможности объединения ЦД СЧ ЛА в единый функциональный ЦД ЛА. При этом ЦД ЛА должен обеспечивать заданный уровень адекватности реальному физическому объекту - летательному аппарату.
В предложенном изобретении создание ЦД ЛА для исследования его ЛТХ предлагается решать путем применения технологий киберфизических систем, представляющих собой организационно-техническую концепцию управления информационными потоками и интеграции вычислительных ресурсов в физические процессы жизненного цикла образца авиационной техники. В такой системе датчики, контроллеры и информационные системы объединяются в единую сеть. В соответствии с ПНСТ 417-2020 под понятием «киберфизическая система» понимается интеллектуальная система, которая включает в себя инженерные взаимодействующие сети физических и вычислительных компонентов.
Заявленное изобретение построено с учетом рекомендаций ГОСТ Р 57700.37-2021, в соответствии с требованиями которого программно-технологическая платформа цифровых двойников должна включать средства управления программным обеспечением компьютерного моделирования; средства сбора, обработки, анализа, визуализации, каталогизации, хранения, передачи компьютерных моделей и результатов компьютерного моделирования; средства отслеживания всех изменений конструкторских, технологических решений и модификации компьютерных моделей и вариантов инженерных расчетов; средства оформления результатов; средства защиты данных и организации совместной работы участников проекта в соответствии с правами доступа; средства компьютерного моделирования для планирования применения изделия по назначению, поддержки его технического обслуживания и ремонта.
При этом, наиболее близким аналогом, известным из уровня техники, является изобретение «Контекстный цифровой двойник» (патент на изобретение US 20190138970 A1), включающий вычислительную систему, содержащую: процессор, сконфигурированный для запуска цифрового двойника, который содержит виртуальное представление актива и который выполняется на основе данных, связанных с активом, определяет операционное событие, которое произошло в отношении актива, на основе выполнения цифрового двойника актива, идентифицировать предыдущие операционные события, которые произошли и которые связаны с определенным операционным событием, и создать контекст для определенного операционного события на основе предыдущих операционных событий; и выход, сконфигурированный для вывода информации для отображения о сгенерированном контексте определенного рабочего события на устройство отображения; энергонезависимый машиночитаемый носитель, на котором хранятся инструкции, выполнение которых приводит к выполнению компьютером способа, включающего: выполнение цифрового двойника, который содержит виртуальное представление актива, при этом цифровой двойник выполняется на основе данных, связанных с активом; определение операционного события, произошедшего в отношении актива, на основе исполнения цифрового двойника актива; идентификацию предыдущих операционных событий, которые произошли и которые относятся к определенному рабочему событию, и создание контекста для определенного рабочего события на основе предыдущих рабочих событий; и вывод информации для отображения о сгенерированном контексте определенного рабочего события на устройство отображения; реализуемый компьютером способ, включающий: выполнение цифрового двойника, который содержит виртуальное представление актива, при этом цифровой двойник выполняется на основе данных, связанных с активом; определение операционного события, произошедшего в отношении актива, на основе исполнения цифрового двойника актива; идентификацию предыдущих операционных событий, которые произошли и которые относятся к определенному рабочему событию, и создание контекста для определенного рабочего события на основе предыдущих рабочих событий; и вывод информации для отображения о сгенерированном контексте определенного рабочего события на устройство отображения.
Недостатком этого решения является то, что система, в силу ограниченных функциональных возможностей в части уточнения и валидации компьютерных моделей, входящих в цифровой двойник летательного аппарата, не быть использована напрямую для синтеза цифрового двойника ЛА из ЦД СЧ.
Технической задачей заявленного изобретения является расширение арсенала устройств, применяемых для внедрения технологии цифровых двойников в авиации.
Решение технической задачи достигается тем, что киберфизическая система исследования летно-технических характеристик летательного аппарата включает: блоки измерений физических значений параметров систем, узлов и агрегатов летательного аппарата от 1 до N, выходы которых соединены со входами бортового измерителя от 1 до N соответственно; ботовой измеритель, первый вход-выход которого соединен с первым входом-выходом блока приема-передачи данных, второй вход-выход ботового измерителя соединен с первым входом-выходом наземного комплекса обработки полетной информации, третий вход-выход ботового измерителя соединен с входом-выходом бортового съемного носителя информации; блок приема-передачи данных, второй вход-выход которого соединен с первым входом-выходом коммутатора беспроводной системы передачи данных, третий вход-выход блока приема-передачи данных соединен с входом-выходом бортовой системы валидации; наземный комплекс обработки полетной информации, второй вход-выход которого соединен с входом-выходом блока хранения первичной полетной информации, третий вход-выход наземного комплекса обработки полетной информации соединен со вторым входом-выходом коммутатора беспроводной системы передачи данных, четвертый вход-выход наземного комплекса обработки полетной информации соединен с первым входом-выходом блока обработки и анализа летно-технических характеристик; блок обработки и анализа летно-технических характеристик, второй вход-выход которого соединен с шестым входом-выходом коммутатора беспроводной системы передачи данных, третий вход-выход блока обработки и анализа летно-технических характеристик соединен с входом-выходом блока хранения информации «Результаты», четвертый вход-выход блока обработки и анализа летно-технических характеристик соединен с входом-выходом блока протоколирования и визуализации результатов; коммутатор беспроводной системы передачи данных, третий вход-выход которого соединен с первым входом-выходом блока управления, четвертый вход-выход коммутатора беспроводной системы передачи данных соединен с первым входом-выходом блока контроля изменений и модификации цифрового двойника, пятый вход-выход коммутатора беспроводной системы передачи данных соединен с первым входом-выходом валидатора цифрового двойника; модуль численного моделирования, второй вход-выход которого соединен с первым выходом-выходом модуля построения дискретной модели; модуль построения дискретной модели, второй вход-выход которого соединен с первым входом-выходом модуля построения геометрической модели; модуль построения геометрической модели, второй вход-выход которого соединен с первым входом-выходом модуля построения структурной модели; модуль построения структурной модели, второй вход-выход которого соединен со вторым входом-выходом блока управления хранилищами цифровых двойников, третий вход-выход модуля построения структурной модели соединен с входом-выходом блока хранения информации «Конструкторская документация»; локальную вычислительную сеть, первый порт подключения которой соединен с первым входом-выходом модуля численного моделирования, второй порт подключения локальной вычислительной сети соединен с третьим входом-выходом модуля построения геометрической модели, третий порт подключения локальной вычислительной сети с первым входом-выходом блока управления хранилищами цифровых двойников, четвертый порт подключения локальной вычислительной сети соединен с входом-выходом высокопроизводительной вычислительной системы, пятый порт подключения локальной вычислительной сети соединен с входом-выходом блока хранения информации «Материалы», шестой порт подключения локальной вычислительной сети соединен с входом-выходом блока хранения информации «Среда», седьмой порт подключения локальной вычислительной сети соединен со вторым входом-выходом валидатора цифрового двойника, восьмой порт подключения локальной вычислительной сети соединен со вторым входом-выходом блока контроля изменений и модификации цифрового двойника, девятый порт подключения локальной вычислительной сети соединен со вторым входом-выходом блока управления, десятый порт подключения локальной вычислительной сети соединен с входом-выходом модуля функционального моделирования; блок управления хранилищами цифровых двойников, третий вход-выход которого соединен с входом-выходом блока хранения информации «Цифровой двойник», входы-выходы для связи с хранилищами цифровых двойников от 1 до N блока управления хранилищами цифровых двойников соединены с входами-выходами блоков хранения информации цифровых двойников от 1 до N соответственно.
Технический результат, достигаемый совокупностью признаков заявленного изобретения, заключается в обеспечении возможности исследования летно-технических характеристик летательного аппарата на основе результатов численного моделирования с применением технологий цифровых двойников.
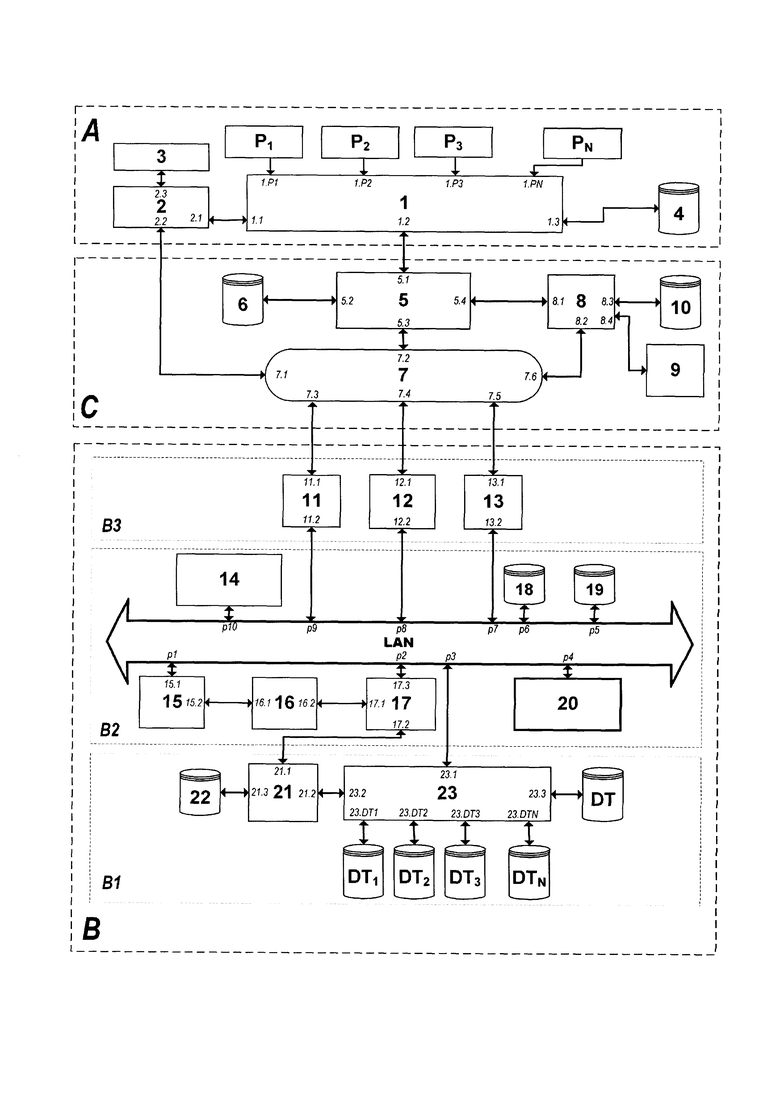
Функционирование заявленного изобретения иллюстрируется фигурой, на которой обозначены:
Контур А - контур технических средств бортовых измерений, расположенных на борту летательного аппарата;
Контур В - контур технических средств цифрового двойника;
Контур В1 - технические средства формирования и хранения ЦД;
Контур В2 - технические средства моделирования;
Контур В3 - технические средства управления, контроля и валидации ЦД;
Контур С - контур технических средств наземной обработки и анализа летно-технических характеристик летательного аппарата;
Р1, Р2, Р3, …PN - блоки измерений физических значений параметров систем, узлов и агрегатов летательного аппарата, для которых сформированы соответствующие цифровые двойники, размещенные в блоках хранения информации DT1, DT2, DT3,… DTN;
N - количество составных частей летательного аппарата (систем, узлов, агрегатов), которые позволяют синтезировать функциональный цифровой двойник летательного аппарата для исследования летно-технических характеристик с заданным уровнем адекватности;
1 - бортовой измеритель;
1.1, 1.2, 1.3 - первый, второй и третий вход-выход бортового измерителя соответственно;
1. Р1, 1.Р2, 1.P3…1.PN - вход бортового измерителя от 1 до N соответственно;
2 - блок приема-передачи данных;
2.1, 2.2, 2.3 - первый, второй и третий вход-выход блока приема-передачи данных соответственно;
3 - бортовая система валидации;
4 - бортовой съемный носитель информации;
5 - наземный комплекс обработки полетной информации;
5.1, 5.2, 5.3, 5.4 - первый, второй, третий и четвертый вход-выход наземного комплекса обработки полетной информации соответственно;
6 - блок хранения первичной полетной информации;
7 - коммутатор беспроводной системы передачи данных;
7.1, 7.2, 7.3, 7.4, 7.5, 7.6 - первый, второй, третий, четвертый, пятый и шестой вход-выход коммутатора беспроводной системы передачи данных соответственно;
8 - блок обработки и анализа летно-технических характеристик;
8.1, 8.2, 8.3, 8.4 - первый, второй, третий, четвертый вход-выход блока обработки и анализа летно-технических характеристик;
9 - блок протоколирования и визуализации результатов;
10 - блок хранения информации «Результаты»;
11 - блок управления;
11. 1, 11.2 - первый и второй вход-выход блока управления соответственно;
12 - блок контроля изменений и модификации цифрового двойника;
12.1, 12.2 - первый и второй вход-выход блока контроля изменений и
модификации цифрового двойника соответственно;
13 - валидатор цифрового двойника;
13.1, 13.2 - первый и второй вход-выход валидатора цифрового двойника соответственно;
14 - модуль функционального моделирования;
15 - модуль численного моделирования;
15.1, 15.2 - первый и второй вход-выход модуля численного моделирования соответственно;
16 - модуль построения дискретной модели;
16.1, 16.2 - первый и второй выход-выход модуля построения дискретной модели соответственно;
17 - модуль построения геометрической модели;
17.1, 17.2, 17.3 - первый, второй и третий выход-выход модуля построения геометрической модели соответственно;
18 - блок хранения информации «Среда»;
19 - блок хранения информации «Материалы»;
20 - высокопроизводительная вычислительная система (СВС);
21 - модуль построения структурной модели;
21.1, 21.2, 21.3 - первый, второй и третий вход-выход модуля построения структурной модели соответственно;
22 - блок хранения информации «Конструкторская документация»;
23 - блок управления хранилищами цифровых двойников;
23.1, 23.2, 23.3 - первый, второй и третий вход-выход блока управления хранилищами цифровых двойников соответственно;
23.DT1, 23.DT2, 23.DT3, 23.DTN - вход-выход блока управления хранилищами цифровых двойников от 1 до N соответственно;
DT - блок хранения информации «Цифровой двойник»;
LAN - (англ. Local Area Network) локальная вычислительная сеть (ЛВС);
р1-р10 - порт подключения локальной вычислительной сети от 1 до 10 соответственно;
DT1, DT2, DT3,… DTN - блоки хранения информации цифровых двойников, соответствующих реальным физическим объектам: системам, узлам или агрегатам летательного аппарата от 1 до N.
Блок 1 - бортовой измеритель, представляет собой бортовую информационно-измерительную систему, предназначенную для получения в условиях полета измерительной информации, характеризующей состояние и работу агрегатов и узлов ЛА (Р1, Р2, Р3,…PN), взаимодействие составных частей ЛА между собой и средой. Бортовой измеритель включает следующие элементы: первичные измерительные преобразователи, воспринимающие физические воздействия от и преобразующие их в электрический сигнал; согласующее устройство, осуществляющее преобразование сигналов в вид, необходимый для регистрации, средства синхронизации, обеспечивающие привязку к единому времени всех потоков регистрируемой информации. Блок 1 может быть реализован в рамках известного технического решения: https://konved.ru/.
Блок 2 - блок приема-передачи данных, представляет собой устройство, осуществляющее обмен информацией с блоком 7 по каналам сотовой связи (может быть выполнен в рамках известного технического решения https://business.gogoair.com/solutions/), спутниковой связи (может быть выполнен в рамках известного технического решения https://www.steccom.ru/technology/), по каналам ботовых систем передачи информации, входящих в состав штатных средств связи и систем передачи данных ЛА (применяемые для этого технические решения определяются составом штатного бортового оборудования, установленного на ЛА).
Блок 3 - бортовая система валидации, представляет собой устройство для сбора и обработки полетной информации для распознавания и идентификации испытательных и валидационных режимов при проведении летных испытаний, может выть реализовано по техническому решению: [Патент № RU 212024 U1, Бортовая система сбора и обработки полетной информации для распознавания и идентификации испытательных и валидационных режимов при проведении летных испытаний / Солдатов А.С.; №2022112001; заявл. 04.05.2022; опубл. 04.07.2022, Бюл. №19].
Блок 4 - бортовой съемный носитель информации, представляет собой блок с энергонезависимой памятью, выполнен в металлическом защищенном корпусе. Блок предназначен для хранения параметров полета, полученных от блока 1 и переноса информации в наземное устройство обработки информации по проводному USB интерфейсу.
Блок 5 - наземный комплекс обработки полетной информации, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением комплексной обработки измерительной информации при летных испытаниях авиационной техники, осуществляющий автоматизированную обработку материалов системы бортовых измерений по алгоритмам, изложенным в [Пашковский, И.М. Летные испытания самолетов и обработка результатов испытаний / И.М. Пашковский, В.А. Леонов, Б.К. Поплавский. М.: Машиностроение, 1985. 415 с.]. Управление модулем осуществляется с терминала пользователя.
Блок 6 - блок хранения первичной полетной информации, представляет собой хранилище, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания.
Блок 7 - коммутатор беспроводной системы передачи данных, представляет собой шлюз, осуществляющий организацию межсетевого взаимодействия по протоколам интернета вещей (англ. - Internet of Things IoT) между блоками 2, 5, 8, 11, 12 и 13. Может быть выполнен на основе известного технического решения https://www.plcsystems.ru/catalog/womaster/section.php?SECTION_ID=895.
Блок 8 - блок обработки и анализа летно-технических характеристик, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Блок осуществляет автоматизированную обработку результатов математического моделирования, полученных от цифрового двойника и от реального физического объекта - летательного аппарата по алгоритмам, изложенным в [Кюхеман Д. Аэродинамическое проектирование самолетов. Пер. с англ. / Пер. Н.А. Благовещенский, Г.И. Майкапар; Под ред. Г.И. Майкапара М.: Машинстроение, 1983. 656 с], а также для формирования рекомендаций и предложений на этапах жизненного цикла ЛА и его ЦД в соответствии с концепцией, изложенной в [Прохоров А., Лысачев М. Цифровой двойник. Анализ, тренды, мировой опыт./ Под ред. Боровкова А. Изд. первое, испр. и доп.М.: ООО «АльянсПринт», 2020. 401 с. ]
Блок 9 - блок протоколирования и визуализации результатов, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя, для документирования результатов оснащается печатающим устройством. Блок осуществляет функции визуализации и протоколирования результатов обработки информации, поступающей от ЛА и ЦД ЛА, а также обеспечивает организацию разделенного доступа к результатам для различных групп пользователей в зависимости от уровня доступа.
Блок 10 - блок хранения информации «Результаты», представляет собой хранилище информации, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания.
Блок 11 - блок управления, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Блок осуществляет функции, связанные с формированием исходных данных эксперимента, задания граничных условий моделирования.
Блок 12 - блок контроля изменений и модификации цифрового двойника, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Блок осуществляет функции, связанные с контролем соответствия состава ЦД ЛА реальному экземпляру ЛА. Может быть выполнен в соответствии с техническим решением, изложенным в заявке на изобретение: [№2023101435 от 24.01.2023 г. (Солдатов А.С. Система контроля состава и характеристик оборудования летательного аппарата для обеспечения функционирования его цифровых двойников].
Блок 13 - валидатор цифрового двойника, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Блок осуществляет процедуру валидации входящих в состав ЦД компьютерных моделей путем проведения валидационного сравнения и оценки соответствия компьютерной модели объекту моделирования по алгоритмам, изложенным в [Забелин А.В., Пыхалов А.А. Валидация конечно-элементных моделей и алгоритм ее реализации // Вестник Пермского национального исследовательского политехнического университета. Механика. 2017. №3. С. 216-233].
Блок 14 - модуль функционального моделирования, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Модуль предназначен для исследования и анализа нестационарных процессов в ЦД ЛА путем создания комплексной модели функционирования ЦД ЛА, для чего проектируются логико-динамические системы, описываемых во входо-выходных отношениях, в виде систем обыкновенных дифференциальных уравнений и/или дифференциально-алгебраических уравнений (https://digitaltwin.ru/wp-content/uploads/2022/09/SimInTech-rus.pdf). В качестве специального программного обеспечения может быть использовано одно из известных программных решений: SimInTech (https://simintech.ru/), Simulink (https://www.mathworks.com/products/simulirik.html), Ansys Twin Builder (https://www.ansys.com/products/digital-twin/ansys-twin-builder) и др.
Блок 15 - модуль численного моделирования, представляет собой вычислительный модуль на основе микропроцессора с предустановленной операционной системой и специальным программным обеспечением. Управление модулем осуществляется с терминала пользователя. Модуль предназначен для численного моделирования задач аэродинамики ЦД ЛА путем выполнения вычислений по встроенному в программное обеспечение алгоритмам, изложенным в [Павловский В.А., Никущенко Д.В Вычислительная гидродинамика. Теоретические основы. СПб. Лань, 2018. 368 с.]. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: «Логос Аэро-Гидро» из пакета программ ЛОГОС (ФГУП «РФЯЦ-ВНИИЭФ») (http://logos.vniief.ru/products/aerodynamics/), ANSYS Fluent (https://www.ansys.com/products/fluids/ansys-fluent) и др.
Блок 16 - модуль построения дискретной модели, представляет собой микропроцессор со специальным программным обеспечением и терминалом пользователя. Модуль предназначен для создания сеточной модели для многодисциплинарных расчетов. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: «Логос Препост» из пакета программ ЛОГОС (ФГУП «РФЯЦ-ВНИИЭФ») (http://logos.vniief.ru/products/prepost/), ANSYS Meshing (https://www.ansys.com/products/meshing) и др.
Блок 17 - модуль построения геометрической модели, представляет собой микропроцессор со специальным программным обеспечением и терминалом пользователя. Модуль предназначен для построения трехмерной модели ЦД. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: KOMITAC-3D (https://kompas.ru/kompas-3d/about/), SOLIDWORKS Desktop 3D CAD (https://www.solidworks.com/domain/design-engineering), NX CAD (Siemens Digital Industries Software) (https://siemens-nx.syssoft.ru/) и др.
Блок 18 - блок хранения информации «Среда», представляет собой хранилище, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания. Хранилище предназначено для хранения и организации доступа к параметрам твердых, жидких и газообразных сред, используемых при моделировании различных физических процессов (плотность, вязкость, текучесть, электропроводность и т.п.).
Блок 19 - блок хранения информации «Материалы», представляет собой хранилище, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания. Хранилище предназначено для хранения и организации доступа к характеристикам конструкционных материалов (предел прочности, предел текучести, температура плавления, рабочая температура и т.д.), используемых при моделировании.
Блок 20 - высокопроизводительная вычислительная система (СВС) (англ. High Performance Computing, НРС), построенная в формате вычислительного кластера (группа серверов, соединенных с помощью скоростной сети и использующих специализированное программное обеспечение). Серверы взаимодействуют между собой для увеличения доступной памяти и количества процессоров, используемых для решения задачи. В состав СВС входят: вычислительный узел кластера, представляющий собой сервер на базе многоядерных процессоров; управляющий узел кластера, представляющий собой высокопроизводительный сервер, выполняющий функции планирования и мониторинга; блок коммутации, обеспечивающий высокую скорость передачи данных между узлами, система хранения данных, для хранения промежуточных данных, получаемых в ходе вычислений; система охлаждения и система обеспечения бесперебойного питания. Система может быть построена на базе известного технического решения (https://www.karma-group.ru/catalog/huawei_mission_critical_servers/server-huawei-kunlun/kunlun-9008-V5/).
Блок 21 - модуль построения структурной модели, представляет собой микропроцессор со специальным программным обеспечением и терминалом пользователя. Модуль предназначен для построения двумерных и трехмерных геометрических моделей узлов, агрегатов и систем ЦД ЛА по конструкторской документации, хранящейся в блоке 22. Также в модуле осуществляется корректировка структурной модели и отслеживаются все изменения, вносимые в конструкторскую документацию. В качестве специального программного обеспечения может быть использовано одно из известных программных решений: KOMTIAC-3D (https://kompas.ru/kompas-3d/about/), SOLID WORKS Desktop 3D CAD (https://www.solidworks.com/domain/design-engineering), NX CAD (Siemens Digital Industries Software) (https://siemens-nx.syssoft.ru/) и др.
Блок 22 - блок хранения информации «Конструкторская документация», представляет собой хранилище, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания. В блоке хранится оцифрованная конструкторская документация ЛА.
Блок 23 - блок управления хранилищами цифровых двойников, представляет собой микропроцессор со специальным программным обеспечением и терминалом пользователя. Блок предназначен для организации доступа к блокам хранения информации цифровых двойников, соответствующих реальным физическим объектам: системам, узлам или агрегатам летательного аппарата Р1, Р2, Р3,…PN.
DT - блок хранения информации «Цифровой двойник», представляет собой хранилище, содержащее массив жестких дисков (HDD или SSD), контроллер дискового массива, внешний корпус и блок питания. Блок предназначен для хранения компьютерных моделей и результатов моделирования цифровых двойников DT1, DT2, DT3,… DTN и ЦД ЛА в целом, на основе результатов моделирования в блоках 14 и 15.
LAN - локальная вычислительная сеть, построенная по технологии Ethernet (стандарты IEEE 802.3), к которой через порты р1-р10 соединительными кабелями типа витая пара (cat.8) через разъемы RJ45 подключаются к общей шине блоки 11-15, 17-20, 23, имеющие уникальный адрес (МАС-адрес).
Функционирование заявляемого изобретения заключается в следующем.
Технические средства бортовых измерений, расположенные на борту ЛА (контур А), включают блоки P1, Р2, Р3,…PN, 1-4. Они осуществляют многоплановые измерения на борту ЛА и организуют идентификацию, обработку, хранение и передачу в наземный комплекс обработки информации текущих параметров систем, узлов и агрегатов ЛА. Путем подключения блоков Р1, Р2, Р3,…Pn к системам, узлам и агрегатам ЛА, измеряются физические значения параметров соответствующих СЧ. Сигналы от датчиков блоков P1, Р2, Р3,…PN поступают в ботовой измеритель 2, где осуществляется их идентификация и обработка. В качестве ботового измерителя на этапе летных испытаний используется нештатная система ботовых измерений, например: [https://konved.ru/], а на этапах эксплуатации - система объективного контроля и штатные системы ЛА. После обработки сигналов в блоке 1, первичная полетная информация записывается и хранится в блоке 4, откуда может быть перенесена после выполнения полета в блок 5. Во время выполнения полета первичная полетная информация из блока 1 через блок 2 передается на землю в блок 7 и проходит обработку на борту ЛА в блоке 3. Передача полетной информации с борта ЛА осуществляется по каналам сотовой, спутниковой связи, либо с использованием каналов штатных ботовых систем передачи информации ЛА, при этом должно обеспечиваться устойчивая двусторонняя связь с коммутатором 7. После выполнения полета информация от 1 переносится в наземный комплекс обработки полетной информации 5 по проводному интерфейсу.
Технические средства наземной обработки и анализа летно-технических характеристик летательного аппарата включают блоки 5-10 (контур С). Функция технических средств контура С состоит в сборе, обработке и анализе информации, полученной от реального физического объекта (ЛА) и его цифрового двойника. Первичная полетная информация, обработанная в блоке 5, через коммутатор 7 поступает в блок 8, где осуществляется автоматизированная обработка результатов моделирования, полученных от цифрового двойника и от реального физического объекта -летательного аппарата, а также для управления режимами ЛА и ЦД в соответствии с подходом, предложенным в [Корнев, А. В. Применение отечественных суперкомпьютерных технологий для создания перспективных образцов авиационной техники / А.В. Корнев, А.С. Козелков. // Современные информационные технологии и ИТ-образование, 2021. Т. 17, №2. С. 250-264].
Результаты обработки передаются для записи и хранения в блок 10, а в блок 9 для визуализации и протоколирования результатов.
Технические средства цифрового двойника (контур В) по предназначению и выполняемым функциям подразделяются на три группы: технические средства формирования и хранения ЦД (блоки 21, 22, 23, DT, DT1, DT2, DT3,… DTN, контур В1), технические средства моделирования (блоки 14-20, контур В2) и технические средства управления, контроля и валидации ЦД (блоки 11-13, контур В3).
Для исследования летно-технических характеристик ЛА в системе производится построение ЦД СЧ ЛА, которое начинается в модуле построения структурной модели (блок 21), для построения которой используется конструкторская документация ЛА и библиотеки моделей поверхности изделий из блока 22. На основании формированной структурной модели в блоке 17 создается геометрическая модель СЧ ЛА.
Для выполнения дальнейших расчетов необходимо сформировать компьютерную геометрическую модель интересующей области исследования, подготовленную для создания сеточной модели расчетной зоны на базе геометрической. В блоке 16 осуществляется разбиение геометрической модели, созданной в блоке 17, на отдельные малые ячейки (контрольные объемы). Эта процедура производится полуавтоматически в модуле 16 по алгоритмам, изложенным в [Сегерлинд Л. Применение метода конечных элементов. М.: Мир, 1979. 392 с.]. Созданная сеточная модель для многодисциплинарных расчетов поступает из блока 16 для получения численной модели в блок 15 для численного моделирования задач аэродинамики ЦД ЛА путем решения задач течения жидкости и газа, многофазных и реагирующих потоков, а также акустики при проектировании высокотехнологичных промышленных изделий по алгоритмам, изложенным в [Павловский В.А., Никущенко Д.В Вычислительная гидродинамика. Теоретические основы. СПб. Лань, 2018. 368 с.].
Полученная в блоке 15 численная модель после расчета представляет собой массив данных: дискретная модель (сетка), в которой для каждой ячейки найдены параметры потока (давление, температура, скорость, плотность и т.п.), соответствующие сошедшемуся решению.
Обмен данными между блоками 15, 17-20 и 23 при совместном моделировании и блоком 14 происходит по ЛВС. Результаты моделирования из блока 15 через ЛВС поступают в блок 14, где формируются комплексные математические модели, предназначенные для исследования и анализа нестационарных процессов в ЦД ЛА и создаются комплексные модели функционирования ЦД ЛА для исследования летно-технических характеристик путем проектирования логико-динамических систем, описываемых во входо-выходных отношениях, в виде систем обыкновенных дифференциальных уравнений и/или дифференциально-алгебраических уравнений в соответствии с подходом, предложенным в [https://digitaltwin.ru/wp-content/uploads/2022/09/SimInTech-ms.pdf] и в [Корнев А.В., Маковская Т.Д., Сатин А.А. Виртуальная модель функционирования летательного аппарата в программном комплексе SimInTech // В книге: Системный анализ, управление и навигация. XXV международная научная конференция: тезисы докладов. МАИ (национальный исследовательский университет), АНО ДПО «Космос - образование». Москва, 2021. С. 115-116.]
Формирование исходных данных и задание граничных условий моделирования осуществляется в блоке 11. Процедуры контроля соответствия состава ЦД ЛА реальному экземпляру ЛА осуществляются в блоке 12. В блоке 13 функционирует валидатор цифрового двойника, осуществляющий процедуру валидации полученных моделей путем проведения валидационного сравнения и оценки соответствия компьютерной модели объекту моделирования. При валидации ЦД обмен необходимой для сравнения и оценки информацией между ЛА и его ЦД происходит через коммутатор (блок 7).
Для реальных трехмерных задач с большим количеством расчетных ячеек процесс получения численного решения занимает значительное время, поэтому для ускорения выполнения вычислений предусмотрена высокопроизводительная вычислительная система (блок 20), доступ к которой осуществляется по ЛВС. Вычислительные ресурсы блока 20 используются блоками 14 и 15. Также для удобства и минимизации возможных ошибок в расчетах предусмотрены два блока хранения информации: блок 18 - блок хранения информации «Среда», предназначенный для хранения и организации доступа к параметрам твердых, жидких и газообразных сред, используемых при моделировании различных физических процессов (плотность, вязкость, текучесть, электропроводность и т.п.) и блок 19 - блок хранения информации «Материалы», предназначенный для хранения и организации доступа к характеристикам конструкционных материалов (предел прочности, предел текучести, температура плавления, рабочая температура и т.д.), используемых при моделировании.
Результаты моделирования поступают в блоки 5 и 8 через блок 7 и используются в дальнейшем для исследований и управления процессами жизненного цикла ЛА.
В блоке 8 на основе алгоритмов, изложенных в [Чепурных. И.В. Динамика полета самолетов: учеб. пособие / И.В. Чепурных. Комсомольск-на-Амуре: ФГБОУ ВПО «КнАГТУ», 2014. - 112 с.], производится расчет основных летно-технических характеристик самолета с использованием метода тяг Н.Е. Жуковского, определяются характеристики дальности и продолжительности полета ЛА, радиус действия ЛА, производится оценка влияния загрузки ЛА на дальность полета.
В блоке протоколирования и визуализации результатов (9) осуществляется построение диаграммы потребных и располагаемых тяг либо диаграммы потребных и располагаемых мощностей, построение кривых скороподъемности ЛА, формируются таблицы с результатами определения характеристик дальности и продолжительности полета ЛА.
Полученные компьютерные модели, а также результаты моделирования поступают в блоки хранения компьютерных моделей и результатов моделирования цифровых двойников DT1, DT2, DT3,… DTN и блок хранения информации «Цифровой двойник» (блок DT).
Киберфизическая система исследования летно-технических характеристик летательного аппарата содержит блоки измерений физических параметров систем, узлов, агрегатов летательного аппарата, бортовой измеритель, блок приемо-передачи данных, наземный комплекс обработки полетной информации, блок обработки и анализа летно-технических характеристик, коммутатор беспроводной системы передачи данных, модуль численного модулирования, модули построения дискретной модели, геометрической модели, структурной модели, локальную вычислительную сеть, блок управления хранилищами цифровых двойников, соединенных определенным образом. Обеспечивается расширение арсенала технических средств для технологии цифровых двойников для авиации. 1 ил.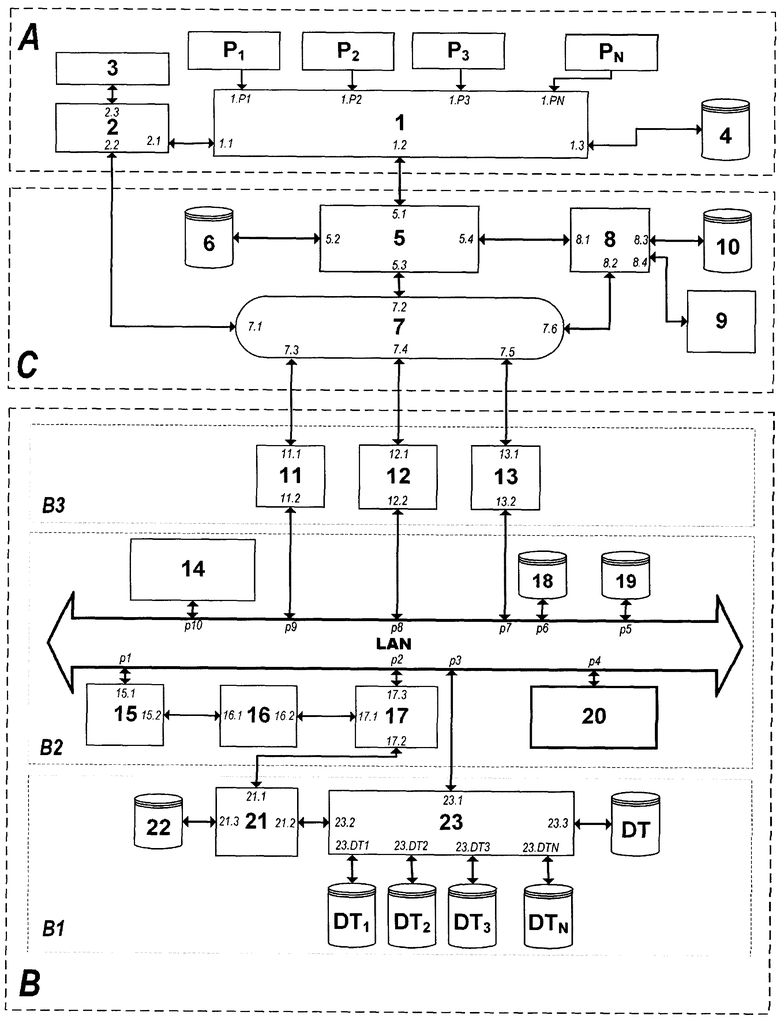
Киберфизическая система исследования летно-технических характеристик летательного аппарата, характеризующаяся тем, что она включает:
блоки измерений физических значений параметров систем, узлов и агрегатов летательного аппарата от 1 до N, выходы которых соединены с входами бортового измерителя от 1 до N соответственно;
бортовой измеритель, первый вход-выход которого соединен с первым входом-выходом блока приема-передачи данных, второй вход-выход бортового измерителя соединен с первым входом-выходом наземного комплекса обработки полетной информации, третий вход-выход бортового измерителя соединен с входом-выходом бортового съемного носителя информации;
блок приема-передачи данных, второй вход-выход которого соединен с первым входом-выходом коммутатора беспроводной системы передачи данных, третий вход-выход блока приема-передачи данных соединен с входом-выходом бортовой системы валидации;
наземный комплекс обработки полетной информации, второй вход-выход которого соединен с входом-выходом блока хранения первичной полетной информации, третий вход-выход наземного комплекса обработки полетной информации соединен со вторым входом-выходом коммутатора беспроводной системы передачи данных, четвертый вход-выход наземного комплекса обработки полетной информации соединен с первым входом-выходом блока обработки и анализа летно-технических характеристик;
блок обработки и анализа летно-технических характеристик, второй вход-выход которого соединен с шестым входом-выходом коммутатора беспроводной системы передачи данных, третий вход-выход блока обработки и анализа летно-технических характеристик соединен с входом-выходом блока хранения информации «Результаты», четвертый вход-выход блока обработки и анализа летно-технических характеристик соединен с входом-выходом блока протоколирования и визуализации результатов;
коммутатор беспроводной системы передачи данных, третий вход-выход которого соединен с первым входом-выходом блока управления, четвертый вход-выход коммутатора беспроводной системы передачи данных соединен с первым входом-выходом блока контроля изменений и модификации цифрового двойника, пятый вход-выход коммутатора беспроводной системы передачи данных соединен с первым входом-выходом валидатора цифрового двойника;
модуль численного моделирования, второй вход-выход которого соединен с первым выходом-выходом модуля построения дискретной модели;
модуль построения дискретной модели, второй вход-выход которого соединен с первым входом-выходом модуля построения геометрической модели;
модуль построения геометрической модели, второй вход-выход которого соединен с первым входом-выходом модуля построения структурной модели;
модуль построения структурной модели, второй вход-выход которого соединен со вторым входом-выходом блока управления хранилищами цифровых двойников, третий вход-выход модуля построения структурной модели соединен с входом-выходом блока хранения информации «Конструкторская документация»;
локальную вычислительную сеть, первый порт подключения которой соединен с первым входом-выходом модуля численного моделирования, второй порт подключения локальной вычислительной сети соединен с третьим входом-выходом модуля построения геометрической модели, третий порт подключения локальной вычислительной сети с первым входом-выходом блока управления хранилищами цифровых двойников, четвертый порт подключения локальной вычислительной сети соединен с входом-выходом высокопроизводительной вычислительной системы, пятый порт подключения локальной вычислительной сети соединен с входом-выходом блока хранения информации «Материалы», шестой порт подключения локальной вычислительной сети соединен с входом-выходом блока хранения информации «Среда», седьмой порт подключения локальной вычислительной сети соединен со вторым входом-выходом валидатора цифрового двойника, восьмой порт подключения локальной вычислительной сети соединен со вторым входом-выходом блока контроля изменений и модификации цифрового двойника, девятый порт подключения локальной вычислительной сети соединен со вторым входом-выходом блока управления, десятый порт подключения локальной вычислительной сети соединен с входом-выходом модуля функционального моделирования;
блок управления хранилищами цифровых двойников, третий вход-выход которого соединен с входом-выходом блока хранения информации «Цифровой двойник», входы-выходы для связи с хранилищами цифровых двойников от 1 до N блока управления хранилищами цифровых двойников соединены с входами-выходами блоков хранения информации цифровых двойников от 1 до N соответственно.
| РЕЗЬБОНАРЕЗНОЕ УСТРОЙСТВО | 0 |
|
SU212024A1 |
| СПОСОБ РАЗРАБОТКИ И СИМУЛЯЦИИ СИСТЕМЫ АВТОМАТИЗАЦИИ ПОСРЕДСТВОМ ЦИФРОВЫХ ДВОЙНИКОВ | 2020 |
|
RU2789787C1 |
| US 20230026782 A1, 26.01.2023 | |||
| Матричный индикатор, его варианты и способ его изготовления | 2012 |
|
RU2610809C2 |
| US 10847038 B2, 24.11.2020. | |||
