Область техники, к которой относится изобретение
Изобретение относится к области наземных испытаний аппаратных средств и программно-алгоритмического обеспечения цифровой системы управления летательного аппарата (ЛА). Стенд полунатурного моделирования движения ЛА позволяет проводить наземную отработку функционирования цифровой системы управления ЛА в условиях имитации реального полета.
Уровень техники
Известен комплекс (стенд) полунатурного моделирования управления ЛА, содержащий: автоматизированное рабочее место (АРМ) моделирования; АРМ визуализации; макет наземного пункта управления; макет ЛА в составе: пилотажно-навигационного комплекса, сервоприводов. Комплекс, предназначенный для полунатурного моделирования систем управления ЛА, реализующий функции построения математической модели объекта, создания алгоритмов и программного обеспечения бортового радиоэлектронного оборудования и наземного пункта управления, а также визуализации трехмерной модели аппарата и закабинной обстановки в режиме тренажера [С.А. Белоконь, Ю.Н. Золотухин, М.Н. Филиппов. Архитектура комплекса полунатурного моделирования систем управления ЛА. АВТОМЕТРИЯ. 2017. Т. 53, № 4, стр.44-50].
Известен стенд для полунатурного моделирования системы самонаведения ЛА, содержащий излучатель сигналов (имитатор цели), головку самонаведения (ГСН), вычислительно-моделирующее устройство (ВМУ). Вычислительно-моделирующее устройство содержит блоки моделей динамики и движения ЛА, модели движения цели, модели движения гиростабилизированной платформы ГСН, модели управления гиростабилизированной платформой ГСН, модели расчета единичного вектора «ЛА-цель». Стенд позволяет в реальном масштабе времени проводить полунатурное моделирование системы самонаведения ЛА во всем диапазоне угловых скоростей линии визирования «ЛА-цель» без искажения динамики контура системы [RU 2338992C1, 2008.11.20, Елизаров В.С. Стенд для полунатурного моделирования системы самонаведения ЛА].
Известен комплекс (стенд) полунатурного моделирования ЛА типа мультикоптер, состоящий из вычислительного центра и средств моделирования. Вычислительный центр (ВЦ) осуществляет: расчет математической модели для подготовки навигационных параметров для шестистепенной платформы манипулятора; подыгрыш внешней обстановки (атмосферы); визуализацию результатов математического моделирования; регистрацию навигационных параметров средств моделирования и внутренних параметров математической модели. Средства моделирования выполняют следующие функции: обеспечения динамического подобия с помощью шестистепенной платформы Гью-Стьюарта; имитацию навигационных датчиков (GPS, барометр, компас); визуализацию внешней обстановки с использованием коллиматора для отработки оптических систем; обеспечение управления беспилотным летательным аппаратом (БЛА) типа мультикоптер с помощью центрального вычислителя БЛА. Комплекс позволяет осуществлять отработку систем управления БЛА (в том числе критических режимов), систем управления гиростабилизированным подвесом, отработку измерительных систем и идентификацию характеристик математических моделей [Гоголев А.А. Полунатурное моделирование беспилотных ЛА типа мультикоптер. Труды МАИ. Выпуск 2017. № 92).
Недостатком известных стендов полунатурного моделирования движения ЛА является дополнительное фазовое запаздывание имитирующих сигналов инерциальных датчиков, формируемых с использованием математической модели движения ЛА, выполняемой на отдельном вычислительном узле (АРМ моделирования, ВМУ или ВЦ) и связанной линией обратной связи с модулем системы управления центрального вычислителя ЛА. Дополнительное запаздывание имитирующих сигналов инерциальных датчиков, отсутствующее в условиях реального полета ЛА, способствует искажению динамики контура стабилизации ЛА и приводит к снижению точности полунатурного моделирования движения ЛА, особенно существенному для скоростных и высокоманевренных ЛА.
Цифровая система управления ЛА содержит в своем составе: инерциальные датчики движения (3-и акселерометра и 3-и гироскопа), центральный вычислитель и рулевые приводы органов управления ЛА.
В условиях реального полета сигналы, вырабатываемые чувствительными элементами инерциальных датчиков движения, поступают в центральный вычислитель, где на их основе вычисляются текущие параметры углового и пространственного движения ЛА. В памяти центрального вычислителя хранятся заданные параметры движения ЛА, а также алгоритмы обработки информации в каналах угловой стабилизации и стабилизации движения центра масс ЛА. Центральный вычислитель сравнивает текущие параметры движения с заданными, определяет сигнал ошибки и вырабатывает сигналы в каналах управления ЛА. Управляющие сигналы поступают на рулевые приводы органов управления, в результате отклонения последних осуществляется движение ЛА по заданной траектории с требуемой точностью.
В наземных условиях при неподвижном размещении ЛА на испытательном стенде, чувствительные элементы инерциальных датчиков не способны вырабатывать сигналы движения, в этом случае для формирования имитирующих сигналов инерциальных датчиков для системы управления используется математическая модель движения ЛА.
Известные из [Гоголев А.А. Полунатурное моделирование беспилотных ЛА типа мультикоптер. Труды МАИ. Выпуск 2017. № 92] и [С.А. Белоконь, Ю.Н. Золотухин, М.Н. Филиппов. Архитектура комплекса полунатурного моделирования систем управления летательными аппаратами. Автометрия. 2017. Т.53, № 4, стр.44-50] способы формирования имитирующих сигналов инерциальных датчиков с использованием модели движения ЛА, следующие: с установкой чувствительных элементов датчиков на подвижной платформе манипулятора и вычислением имитирующих сигналов на математической модели инерциальных датчиков. В первом случае, выходные данные модели движения ЛА передаются в блок управления подвижной платформы манипулятора, в результате движения платформы чувствительные элементы инерциальных датчиков вырабатывают имитирующие сигналы. Во втором случае, выходные данные модели движения ЛА поступают в модель инерциальных датчиков для формирования имитирующих сигналов (обычно, модель инерциальных датчиков реализуют в составе математической модели движения ЛА). Сформированные имитирующие сигналы инерциальных датчиков поступают в модуль системы управления центрального вычислителя ЛА и замыкают собой контур полунатурного моделирования движения ЛА.
Наиболее близким по технической сущности к заявленному изобретению является известный стенд полунатурного моделирования [Гоголев А.А. Полунатурное моделирование беспилотных ЛА типа мультикоптер. Труды МАИ. Выпуск 2017. №92], принятый в качестве прототипа. Известный стенд полунатурного моделирования позволяет осуществлять отработку систем управления беспилотных ЛА (в том числе критических режимов), систем управления гиростабилизированным подвесом, отработку измерительных систем и идентификацию характеристик математических моделей.
Однако, известный стенд полунатурного моделирования беспилотных ЛА имеет недостаток, обусловленный выполнением модели движения ЛА на отдельном вычислительном центре и использованием подвижной платформы манипулятора для выработки имитирующих сигналов инерциальных датчиков, установленных на этой платформе. При данной структуре стенда полунатурного моделирования в линиях обратных связей контуров управления и стабилизации ЛА возникают дополнительные фазовые запаздывания имитирующих сигналов инерциальных датчиков, что приводит к снижению точности полунатурного моделирования, особенно существенному для скоростных и высокоманевренных ЛА.
Задачей заявляемого изобретения является повышение точности полунатурного моделирования движения скоростных и высокоманевренных ЛА с цифровой системой управления за счет устранения дополнительных фазовых запаздываний имитирующих сигналов инерциальных датчиков в линиях обратных связей контура полунатурного моделирования движения ЛА.
Раскрытие сущности изобретения
Технический результат заявляемого изобретения заключается в повышение точности полунатурного моделирования движения скоростных и высокоманевренных ЛА с цифровой системой управления. Дополнительный получаемый результат - упрощение электрической схемы подключения ЛА на стенде полунатурного моделирования.
Указанный технический результат заявленного изобретения, позволяющий решить поставленную задачу, при известном стенде полунатурного моделирования движения ЛА, содержащем блок центрального вычислителя ЛА, установленный на подвижной платформе манипулятора, с внутренними инерциальными датчиками, модулем системы управления с модулями навигации и ориентации, наведения, стабилизации, блок рулевых приводов органов управления, блок вычислительного центра стенда с моделью движения и инерциальных датчиков, регистратором данных, достигается тем, что модель движения и инерциальных датчиков размещена в модуле системы управления центрального вычислителя ЛА, выход блока внутренних инерциальных датчиков соединен с первым входом модели движения и инерциальных датчиков, выход модели движения и инерциальных датчиков соединен с входом модуля навигации и ориентации и входом модуля стабилизации, выход модуля навигации и ориентации соединен с входом модуля наведения, выход модуля наведения соединен с входом модуля стабилизации, выход модуля стабилизации соединен с входом блока рулевых приводов, выход блока рулевых приводов соединен со вторым входом модели движения и инерциальных датчиков модуля системы управления центрального вычислителя ЛА, блок центрального вычислителя ЛА установлен на неподвижном основании.
Краткое описание чертежей
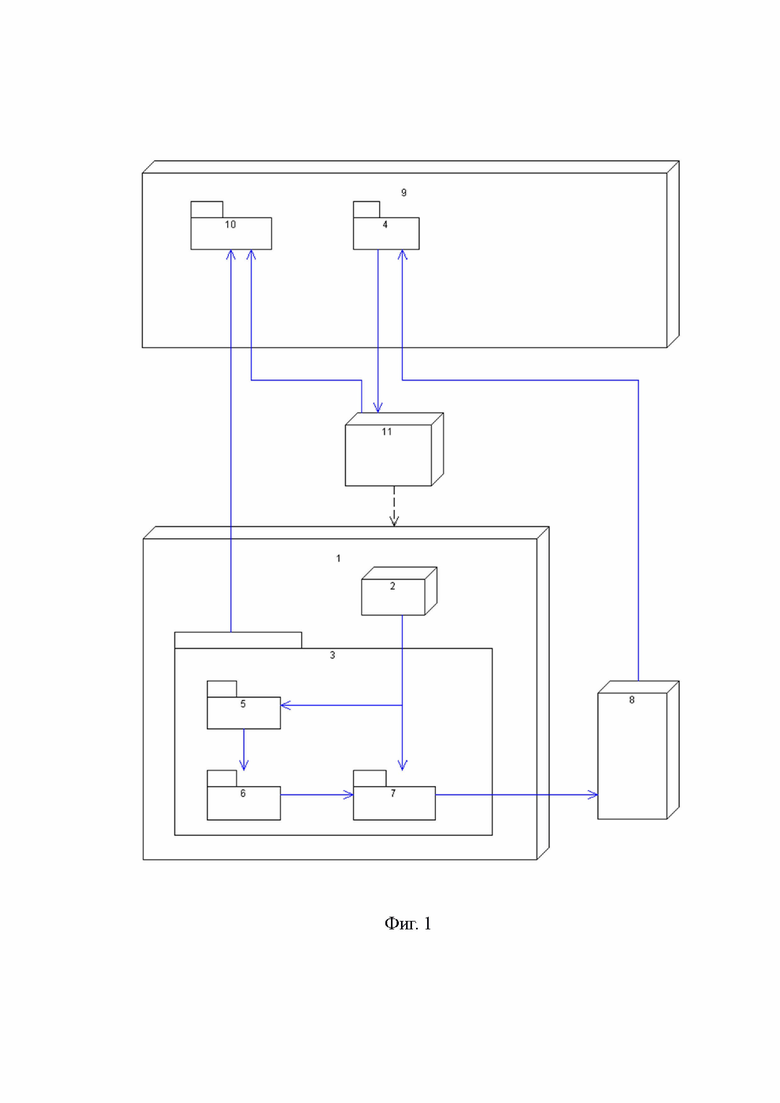
Структурная схема известного стенда полунатурного моделирования поясняется чертежом (фигура 1), на котором представлены блок 1 центрального вычислителя ЛА, установленный на подвижной платформе блока 11 манипулятора, с блоком 2 внутренних инерциальных датчиков, модулем 3 системы управления ЛА с модулями 5 навигации и ориентации, 6 наведения, 7 стабилизации, блок 8 рулевых приводов органов управления ЛА, блок 9 вычислительного центра стенда с модулями 4 модели движения и инерциальных датчиков, 10 регистратора данных.
Сущность заявляемого изобретения поясняется чертежом (фигура 2), на котором представлена структурная схема стенда полунатурного моделирования, включающего блок 1 центрального вычислителя ЛА, установленный на неподвижном основании, с блоком 2 внутренних инерциальных датчиков, модулем 3 системы управления ЛА, с модулями 4 модели движения и инерциальных датчиков, 5 навигации и ориентации, 6 наведения, 7 стабилизации, блок 8 рулевых приводов органов управления ЛА, блок 9 вычислительного центра стенда с модулем 10 регистратора данных.
Осуществление изобретения
В известном стенде полунатурного моделирования движения ЛА (фигура 1), блок 1 центрального вычислителя ЛА установлен на подвижной платформе блока 11 манипулятора, выход блока 2 внутренних инерциальных датчиков соединен с входом модуля 5 навигации и ориентации и с первым входом модуля 7 стабилизации модуля 3 системы управления ЛА, выход модуля 5 навигации и ориентации соединен с входом модуля 6 наведения, выход модуля 6 наведения соединен с вторым входом модуля 7 стабилизации, выход модуля 7 стабилизации соединен с входом блока 8 рулевых приводов органов управления ЛА, выход блока 8 рулевых приводов органов управления ЛА соединен с входом модуля 4 модели движения и инерциальных датчиков блока 9 вычислительного центра стенда, выход модуля 4 модели движения и инерциальных датчиков соединен с входом блока 11 манипулятора, сервоприводы блока 11 манипулятора приводят в движение подвижную платформу с блоком 1 центрального вычислителя ЛА, выход модуля 3 системы управления блока 1 центрального вычислителя ЛА соединен с входом модуля 10 регистратора данных блока 9 вычислительного центра стенда.
Согласно изобретению (фигура 2), модуль 4 модели движения и инерциальных датчиков размещен в модуле 3 системы управления блока 1 центрального вычислителя ЛА, выход блока 2 внутренних инерциальных датчиков соединен с первым входом модуля 4 модели движения и инерциальных датчиков модуля 3 системы управления ЛА, выход модуля 4 модели движения и инерциальных датчиков соединен с входом модуля 5 навигации и ориентации и с первым входом модуля 7 стабилизации, выход модуля 5 навигации и ориентации соединен с входом модуля 6 наведения, выход модуля 6 наведения соединен со вторым входом модуля 7 стабилизации, выход модуля 7 стабилизации модуля 3 системы управления блока 1 центрального вычислителя ЛА соединен с входом блока 8 рулевых приводов органов управления ЛА, выход блока 8 рулевых приводов органов управления ЛА соединен со вторым входом модуля 4 модели движения и инерциальных датчиков модуля 3 системы управления блока 1 центрального вычислителя ЛА, блок 1 центрального вычислителя ЛА установлен на неподвижном основании.
Техническая новизна предлагаемого стенда полунатурного моделирования заключается в том, что модель движения и инерциальных датчиков, формирующая имитирующие сигналы инерциальных датчиков для системы управления ЛА, из вычислительного центра стенда полунатурного моделирования перемещается в модуль системы управления центрального вычислитель ЛА. Такое техническое решение, исключающее линию связи между блоками вычислительного центра и центрального вычислителя ЛА, устраняет причину дополнительного фазового запаздывания имитирующих сигналов инерциальных датчиков и обеспечивает повышение точности полунатурного моделирования движения скоростных и высокоманевренных ЛА с цифровой системой управления.
Повышение точности полунатурного моделирования при отработке цифровой системы управления ЛА, позволяет повысить достоверность получаемых результатов и заменить большое число летных экспериментов на полунатурное моделирование в наземных условиях, что обеспечивает значительный экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИМИТАЦИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ ПРОГРАММНОГО И АППАРАТНОГО ОБЕСПЕЧЕНИЯ ПОЛЁТНОГО КОНТРОЛЛЕРА | 2023 |
|
RU2799166C1 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2338992C1 |
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| СПОСОБ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610877C1 |
| Наземный подвижный стенд и способ его применения для испытаний системы автоматического управления дозаправкой в воздухе | 2023 |
|
RU2819151C1 |
| Способ полунатурного моделирования системы управления летательного аппарата с пассивной или полуактивной или активной головкой самонаведения и устройство для его реализации | 2020 |
|
RU2767956C2 |
| УСТРОЙСТВО ПРОГРАММНО-АППАРАТНОЙ ИМИТАЦИИ ЛАЗЕРНОГО ДАТЧИКА УГЛОВЫХ СКОРОСТЕЙ | 2021 |
|
RU2757856C1 |
| Аппаратно-программная платформа стенда полунатурного моделирования для отработки вычислителя беспилотного летательного аппарата | 2021 |
|
RU2771111C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2637096C2 |

Изобретение относится к области наземных испытаний аппаратных средств и программно-алгоритмического обеспечения цифровой системы управления летательного аппарата (ЛА). Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления содержит блок центрального вычислителя ЛА, блок вычислительного центра стенда, блок рулевых приводов органов управления ЛА, соединенные определенным образом. Блок центрального вычислителя содержит блок внутренних инерциальных датчиков (ИД), модуль системы управления ЛА. Модуль системы управления ЛА содержит модель движения и ИД, модуль системы навигации и ориентации, модуль системы наведения, модуль системы стабилизации. Блок вычислительного центра стенда содержит модуль регистратора данных. Обеспечивается повышение точности полунатурного моделирования движения для скоростных и высокоманевренных ЛА. 2 ил.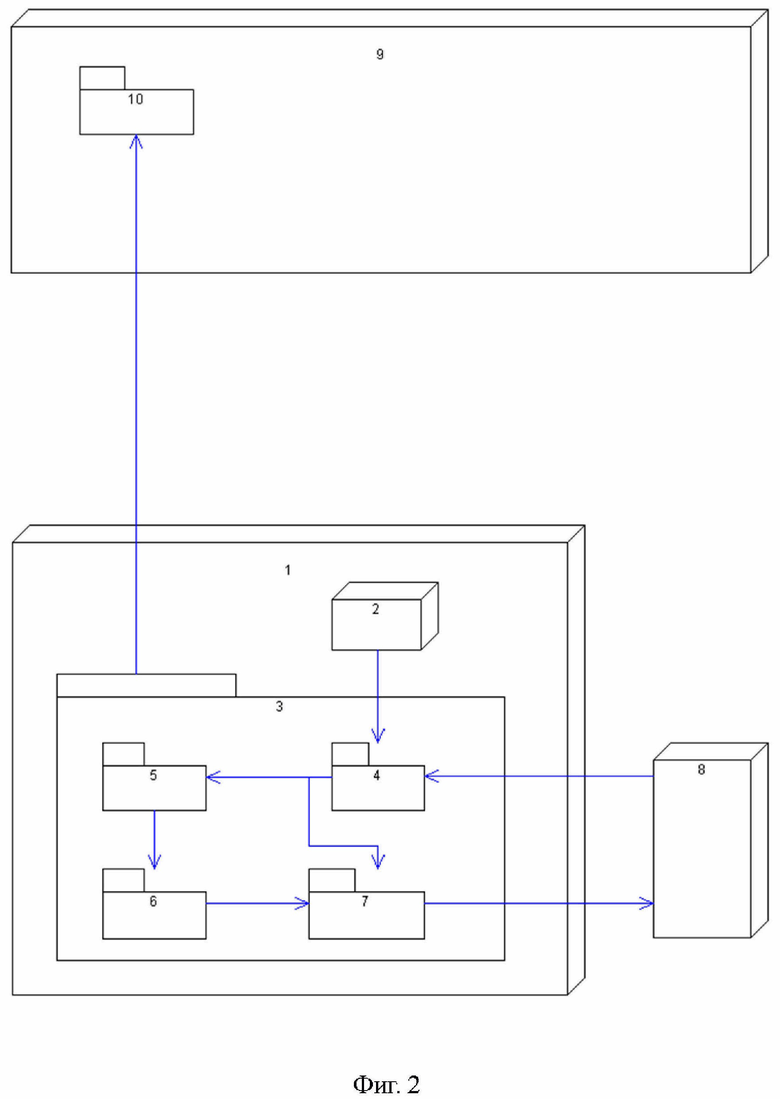
Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления, содержащий блок центрального вычислителя летательного аппарата, установленный на подвижной платформе манипулятора, с внутренними инерциальными датчиками, модулем системы управления с модулями навигации и ориентации, наведения, стабилизации, блок рулевых приводов органов управления, блок вычислительного центра стенда с моделью движения и инерциальных датчиков, регистратором данных, отличающийся тем, что модуль модели движения и инерциальных датчиков размещен в модуле системы управления центрального вычислителя летательного аппарата, выход блока внутренних инерциальных датчиков соединен с первым входом модуля модели движения и инерциальных датчиков, выход модуля модели движения и инерциальных датчиков соединен с входом модуля навигации и ориентации и первым входом модуля стабилизации, выход модуля навигации и ориентации соединен с входом модуля наведения, выход модуля наведения соединен с вторым входом модуля стабилизации, выход модуля стабилизации соединен с входом блока рулевых приводов, выход блока рулевых приводов соединен с вторым входом модуля модели движения и инерциальных датчиков модуля системы управления блока центрального вычислителя летательного аппарата, блок центрального вычислителя летательного аппарата установлен на неподвижном основании.
| СПОСОБ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610877C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| CN 110937137 A, 31.03.2020 | |||
| Система полунатурного моделирования динамических систем | 1982 |
|
SU1121681A1 |
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 0 |
|
SU189475A1 |

