Изобретение относится к области авиационной техники, а именно к способам управления полетом беспилотных летательных аппаратов (БПЛА).
Беспилотный летательный аппарат (БПЛА) - часть сложного комплекса, одна из основных задач которого - оперативное доведение полученных сведений до персонала пункта управления (ПУ).
Важнейшая задача, возлагаемая на БПЛА, - проведение разведки труднодоступных районов, в которых получение информации обычными средствами затруднено или же подвергает опасности здоровье и даже жизнь людей. Помимо военного использования применение комплексов БПЛА открывает возможность оперативного и недорогого способа обследования труднодоступных участков местности, периодического наблюдения заданных районов, цифрового фотографирования для использования в геодезических работах и в случаях чрезвычайных ситуаций.
При обеспечении безопасности полетов БПЛА следует отметить, что система его управления должна строиться с учетом существующих методов с сохранением безопасности всех участников движения.
Наличие навигационной информации, получаемой от спутниковой системы позиционирования, при существующих особенностях летно-технических характеристик БПЛА требует разработки методов управления беспилотными летательными аппаратами в воздушном пространстве с использованием полетной информации при автоматическом зависимом наблюдении, что представляет актуальную задачу.
Так, известен способ для безопасных полетов БПЛА в гражданском воздушном пространстве [Заявка US №2008033604, МПК G05D 1/00; G06F 17/00; G05D 1/00; G06F 17/00, опубл. 2008-02-07]. В состав указанной системы входит наземная станция управления (НСУ), оборудованная устройством визуализации, удаленный пилот-оператор на НСУ и система передачи данных между БПЛА и НСУ. Метод позволяет пилоту-оператору контролировать полет БПЛА с помощью трехмерного синтезируемого изображения. Во время полета бортовая система БПЛА периодически транслирует свой идентификатор, местоположение, высоту и азимут. По полученным от БПЛА данным в системе визуализации генерируется и отображается на экране монитора обстановка вокруг текущего местоположения БПЛА. Пилот-оператор, анализируя данное изображение, воздействует на органы системы управления полетом, чьи сигналы транслируются обратно на БПЛА. В течение тех фаз полета БПЛА, когда система визуализации не используется для управления, он выполняет полет под управлением бортовой автономной системы. Дополнительно обеспечивается канал связи с системой УВД и пилотами других летательных аппаратов, имеющих прямую связь с указанным пилотом-оператором.
Недостаток указанного изобретения состоит в том, что для передачи управляющих сигналов на борт БПЛА от органов управления, на которые воздействует пилот-оператор, требуется широкополосная радиолиния, которая по сравнению с узкополосной линией передачи данных (ЛПД) имеет при той же мощности передатчика меньшую дальность действия, а также низкую помехозащищенность, другим недостатком является необходимость использования дополнительных каналов передачи данных о воздушной обстановке и для связи с пилотами других летательных аппаратов, что снижает уровень надежности и безопасности полетов в воздушном пространстве. Кроме того, еще одним существенным недостатком является то, что управление осуществляется в зоне прямой радиовидимости и не используется для автоматической посадки летательного аппарата.
Автоматическая посадка не проводится в силу больших погрешностей измерения высоты современными высотомерами.
Например, радиовысотомер А-079Э, являющийся радиолокационной станцией ракеты повышенной дальности класса ″воздух-поверхность″ Х-59 МК, имеет погрешность измерения высоты при углах крена и тангажа ±15°:
- систематическая составляющая, 0,4 м при Н<50 м,
- случайная составляющая, 0,5 м при 50≤Н≤500 м, где Н - измеряемая высота.
Наиболее близким по своей технической сущности и достигаемому результату к заявленному является способ управления одним или несколькими беспилотными летательными аппаратами, каждый из которых оборудован бортовой автоматической системой управления (патент РФ №2390815, МПК G05D 1/00, опубл. 27.05.2010 г.).
В известном способе управления одним или несколькими беспилотными летательными аппаратами, каждый из которых оборудован бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией и со стационарным или подвижным пунктом управления, оборудованным автоматизированным рабочим местом оператора, при этом передача команд управления движением беспилотного летательного аппарата, данных о координатах и параметрах его движения, идентификационных номеров, находящихся в пределах радиовидимости, производится в радиоканалы, причем трансляция сообщений передающей радиостанции производится в заранее заданный отрезок дискретной шкалы единого времени с временным упреждением, которого достаточно для компенсации запаздывания в получении и исполнении указанных команд. Указанный способ принят за прототип.
Недостатком способа управления беспилотными летательными аппаратами по патенту 2390815 является то, что оно осуществляется в зоне прямой радиовидимости, его невозможно использовать при значительном увеличении дальности полета и вне условий прямой радиовидимости, управлять посадкой в четко заданной точке, кроме того, для передачи команд управления требуется широкополосная система радиосвязи, для которой характерны низкие помехозащищенность и помехоустойчивость, а также невозможность управлять БПЛА в режиме реального времени.
Известно, что огромные расстояния между земными станциями и спутником являются причиной того, что отношение сигнал/шум на приемнике очень невелико. Для того чтобы в этих условиях обеспечить приемлемую вероятность ошибки, приходится использовать большие антенны, малошумящие элементы и сложные помехоустойчивые коды. Особенно остро эта проблема стоит в системах подвижной связи, так как в них есть ограничение на размер антенны и, как правило, на мощность передатчика. На качество спутниковой связи оказывают сильное влияние эффекты в тропосфере и ионосфере. К ионосферным эффектам, влияющим на распространение радиоволн, относят мерцание, поглощение, задержку распространения, дисперсию, изменение частоты, вращение плоскости поляризации. Все эти эффекты ослабляются с увеличением частоты.
Проблема задержки распространения сигнала так или иначе затрагивает все спутниковые системы связи. Наибольшей задержкой обладают системы, использующие спутниковый ретранслятор на геостационарной орбите. В этом случае задержка, обусловленная конечностью скорости распространения радиоволн, составляет примерно 250 мс, а с учетом мультиплексирования, коммутации и задержек обработки сигнала общая задержка может составлять до 400 мс. Задержка распространения наиболее нежелательна в приложениях реального времени. При этом время распространения сигнала по спутниковому каналу связи составляет 250 мс. При приближении Солнца к оси спутника - наземная станция радиосигнал, принимаемый со спутника наземной станцией, искажается в результате интерференции. В связи с этими причинами важно учитывать компенсацию задержки в канале передачи команд управления при использовании спутникового канала связи. В этом случае можно определять положение БПЛА как при движении по рассчитанной траектории, так и в режиме реального времени и для безопасной посадки в четко заданной точке.
Техническая задача, на решение которой направлено заявленное изобретение, состоит в повышении эффективности управления БПЛА, возможности определения положения БПЛА при значительном увеличении дальности полета и вне зоны прямой радиовидимости при его движении как в режиме полета по траектории, так и в управлении полетом в пилотируемом режиме реального времени, а также для его безопасной посадки в четко заданной точке за счет возможности учета компенсации задержки в канале передачи команд управления при использовании спутникового канала связи, а в связи с этим - уровня безопасности выполнения полетов в воздушном пространстве.
Поставленная техническая задача достигается тем, что в способе управления беспилотным летательным аппаратом, который оборудован бортовой автоматической системой управления, спутниковой навигационной системой, датчиком времени, представляющим собой высокоточные часы для синхронизации времени, приемо-передающей радиостанцией, при этом передачу команд управления движением БПЛА и передачу данных о координатах и параметрах его движения осуществляют через основой спутниковый канал связи со стационарного или подвижного пункта управления, оборудованного автоматизированным рабочим местом оператора, при этом для определения положения БПЛА при значительном увеличении дальности полета и вне зоны прямой радиовидимости при его движении как в режиме полета по траектории, так и в режиме пилотируемого управления в режиме реального времени, а также для его безопасной посадки учитывают компенсацию задержки в канале передачи команд управления, используя спутниковый канал связи, определяя динамические характеристики воздействия на систему управления БПЛА, а для посадки БПЛА в четко заданной точке транслируют через спутниковый канал связи команды управления посадкой беспилотного летательного аппарата, которую осуществляют на площадку, выбранную оператором по информации, передаваемой с блока автоматизированной системы управления борта беспилотного летательного аппарата, оборудованного видеокамерой.
В предлагаемом способе команды управления беспилотным летательным аппаратом включают навигационные данные о поворотных пунктах маршрута с указанием их географических координат, заданных ортодромических путевых углов, величин бокового упреждения разворота, ограничений на величину крена при выполнении разворота, заданные значения высоты полета, вертикальной скорости и угла наклона траектории, а также отсчет момента измерения указанных данных по шкале единого времени, причем данные об изменении конкретного параметра согласуют с возможными перегрузками и предельными режимами полета беспилотного летательного аппарата и реализуют рядом последовательных изменений этого параметра.
Управление беспилотным летательным аппаратом при перерыве в получении информации от спутниковой системы навигации осуществляют по данным инерционной системы навигации, в случае перерыва в получении команд от оператора полет осуществляется по заложенной аварийной программе или по программе полета движения по траектории, заложенной в автопилоте, при этом характеристики линии связи - полоса частот меняется в зависимости от дальности и качества передаваемой информации.
По заявляемому способу возможную временную задержку исполнения команд управления определяют с учетом времени распространения сигнала от беспилотного летательного аппарата через ретранслятор геостационарного спутника к пункту управления и обратно, времени считывания информации с датчиков положения и движения БПЛА и состояния бортовых систем беспилотного летательного аппарата, а также времени задержки сигнала в буферных устройствах линии формирования и передачи команд.
По способу в пункте управления по данным о текущих координатах и параметрах движения БПЛА, которые получены по основному каналу связи, формируют двух- или трехмерное изображение воздушной обстановки на экране монитора автоматизированного рабочего места оператора.
По заявляемому способу сообщение, передаваемое бортовой радиостанцией беспилотного летательного аппарата, включает данные о параметрах внешней среды, характеризующие температуру и атмосферное давление на высоте полета, а также данные о состоянии бортового оборудования и систем.
По способу команды управления формируют с учетом динамических характеристик беспилотного летательного аппарата и его бортовой автоматической системы управления с учетом внешних возмущений, неисправностей и отказов бортового оборудования.
По заявляемому способу сообщения о командах управления и данных о координатах и параметрах движения беспилотного летательного аппарата перед передачей в основной канал связи зашифровывают, а на приемном конце дешифруют.
Возможность обеспечения устойчивой связи является одной из важнейших характеристик, определяющих эксплуатационные возможности управления БПЛА и обеспечивающих доведение сведений, полученных БПЛА, в режиме реального времени до оперативного персонала ПУ.
Передаваемые на БПЛА команды управления, при движении по заданной траектории, содержат код каждого из заранее определенных маневров в горизонтальной и вертикальной плоскостях, параметры указанного маневра, данные о моменте начала маневра и его окончании, а также при дистанционно-пилотируемом управлении в режиме реального времени коды содержат положения аэродинамических элементов, органов управления, время формирования пакета данных и другую необходимую информацию. По данным наблюдений автопилот вычисляет отклонения от программного движения БПЛА, в случае, когда указанные отклонения превышают допустимые, производит корректировку для уменьшения величины указанных отклонений.
По данным о текущих координатах и параметрах движения БПЛА, которые получены по основному спутниковому каналу связи, в пункте управления (ПУ) формируют двух- или трехмерное изображение воздушной обстановки на экране монитора АРМ оператора, рассчитывают прогнозируемую траекторию и направление приема сигналов абонента.
При формировании команд управления учитывают динамические характеристики БПЛА, заложенные в память системы управления алгоритмы, а также внешние возмущения, возможные неисправности и отказы бортового оборудования.
В заявляемом способе сообщения о командах управления и данных о координатах и параметрах движения беспилотного летательного аппарата перед передачей в основной спутниковый канал связи зашифровывают, а на приемном конце дешифруют.
В заявляемом изобретении для обеспечения безаварийного полета и посадки за счет достижения эффекта пилотируемого полета и посадки, повышения точности определения положения и высоты БПЛА при посадке в заданной точке на дальностях, выходящих за зону радиовидимости, изображение посадочной полосы получают с помощью расположенной на БПЛА видеокамеры и передают через линию спутниковой связи, обеспечивающей передачу видеоинформации, в соответствии с которой оператор вырабатывает команды управления и передает эти команды через спутниковый канал связи в блок автоматизированной системы управления БПЛА с учетом компенсации задержки.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности ″новизна″.
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности ″изобретательский уровень″.
Заявленный способ реализуется по блок-схеме, представленной на рис. 1, которая состоит из следующих основных блоков:
1 - датчиков;
2 - спутникового навигационного;
3 - приемо-передающего;
4 - исполнительного;
5 - блока передачи изображений на экран или дисплей;
6 - регистратора времени;
7 - автоматизированной системы управления;
8 - спутникового канала связи;
9 - внешнего блока управления.
При рассмотрении реализации заявляемого способа необходимо учесть, что блоки 1, 2, 3, 4, 5, 6, 7 входят с систему управления БПЛА, поэтому при рассмотрении реализации способа не анализируют взаимодействие всех этих блоков, а рассматривают реализацию способа во взаимодействии системы управления БПЛА с внешним блоком управления (9) через спутниковый канал связи (8).
Способ осуществляется следующим образом: БПЛА передает информацию о своем местоположении на внешний блок управления (9), который представляет собой стационарный или подвижный пункт управления, оборудованный автоматизированным рабочим местом оператора. Передача информации осуществляется через спутниковый канал связи (8). С пункта управления беспилотным аппаратом через спутниковый канал связи (8) информация передается на систему управления БПЛА. Таким образом, на пункте управления (9) можно наблюдать за положением БПЛА при значительном удалении и вне зоны радиовидимости.
При посадке БПЛА в определенную четко заданную точку информация, полученная из блока передачи изображений на экран или дисплей БПЛА (5), представляющего собой видеокамеру, установленную непосредственно на борту БПЛА, направляется через спутниковый канал связи на внешний блок управления (9), обрабатывается и используется для выработки команд обеспечения безопасной посадки БПЛА.
Изобретение относится к способам управления беспилотным летательным аппаратом (БПЛА). При способе передают команды управления движением БПЛА, данные о координатах и параметрах его движения через основной спутниковый канал связи со стационарного или подвижного пункта управления, учитывают компенсацию задержки в канале передачи команд управления, определяют динамические характеристики воздействия на систему управления БПЛА, формируют двух- или трехмерное изображение воздушной обстановки на экране монитора автоматизированного рабочего места оператора пункта управления. Посадку БПЛА осуществляют на площадку, выбранную оператором по информации, переданной с борта БПЛА, оборудованного видеокамерой, транслируют через спутниковый канал связи команды управления посадкой. Обеспечиваются безаварийный полет и посадка при больших дальностях полета. 7 з.п. ф-лы, 1 ил.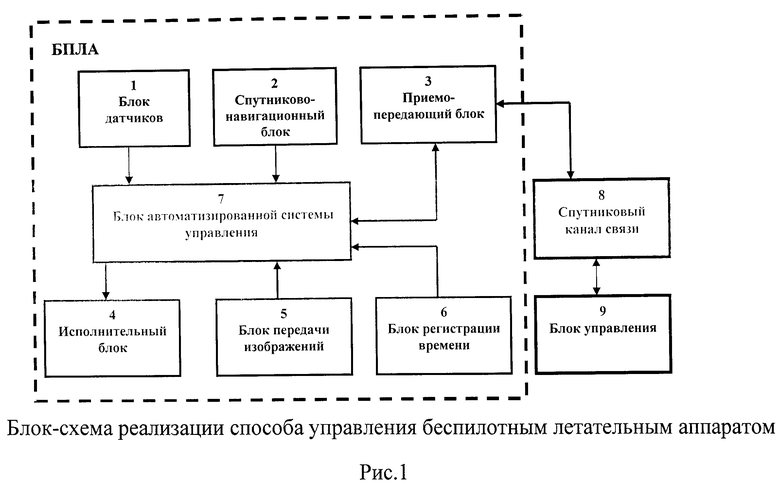
1. Способ управления беспилотным летательным аппаратом, который оборудован бортовой автоматической системой управления, спутниковой навигационной системой, датчиком времени, представляющим собой высокоточные часы для синхронизации времени, приемо-передающей радиостанцией, при этом передачу команд управления движением БПЛА и передачу данных о координатах и параметрах его движения осуществляют через основой спутниковый канал связи со стационарного или подвижного пункта управления, оборудованного автоматизированным рабочим местом оператора, отличающийся тем, что учитывают компенсацию задержки в канале передачи команд управления, используя спутниковый канал связи, определяя динамические характеристики воздействия на систему управления БПЛА, а для посадки БПЛА в четко заданной точке транслируют через спутниковый канал связи команды управления посадкой беспилотного летательного аппарата, которую осуществляют на площадку, выбранную оператором по информации, передаваемой с блока автоматизированной системы управления борта беспилотного летательного аппарата, оборудованного видеокамерой.
2. Способ по п. 1, отличающийся тем, что команды управления беспилотным летательным аппаратом включают навигационные данные о поворотных пунктах маршрута с указанием их географических координат, заданных ортодромических путевых углов, величин бокового упреждения разворота, ограничений на величину крена при выполнении разворота, заданные значения высоты полета, вертикальной скорости и угла наклона траектории, а также отсчет момента измерения указанных данных по шкале единого времени, причем данные об изменении конкретного параметра согласуются с возможными перегрузками и предельными режимами полета беспилотного летательного аппарата и реализуются рядом последовательных изменений этого параметра, приоритет системы управления полетом - пилотируемой или с помощью автопилота, определяется оператором.
3. Способ по п. 1, отличающийся тем, что управление беспилотным летательным аппаратом при перерыве в получении информации от спутниковой системы навигации осуществляют по данным инерционной системы навигации, а при перерыве в получении команд от оператора полет осуществляется по заложенной аварийной программе или по программе полета, движения по траектории, заложенной в автопилоте.
4. Способ по п. 1, отличающийся тем, что возможную временную задержку исполнения команд управления определяют с учетом времени распространения сигнала от беспилотного летательного аппарата через ретранслятор геостационарного спутника к пункту управления и обратно, времени считывания информации с датчиков положения и движения БПЛА и состояния бортовых систем беспилотного летательного аппарата, а также времени задержки сигнала в буферных устройствах линии формирования и передачи команд.
5. Способ по п. 1, отличающийся тем, что в пункте управления по данным о текущих координатах и параметрах движения БПЛА, которые получены по основному спутниковому каналу, формируют двух- или трехмерное изображение воздушной обстановки на экране монитора автоматизированного рабочего места оператора.
6. Способ по п. 1, отличающийся тем, что сообщение, передаваемое бортовой радиостанцией беспилотного летательного аппарата, включает данные о параметрах внешней среды, характеризующие температуру и атмосферное давление на высоте полета, а также данные о состоянии бортового оборудования и систем.
7. Способ по п. 1, отличающийся тем, что команды управления формируют с учетом динамических характеристик беспилотного летательного аппарата и его бортовой автоматической системы управления с учетом внешних возмущений, неисправностей и отказов бортового оборудования.
8. Способ по п. 1, отличающийся тем, что сообщения о командах управления и данных о координатах и параметрах движения беспилотного летательного аппарата перед передачей в основной спутниковый канал связи зашифровывают, а на приемном конце дешифруют.
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ НАВИГАЦИОННОЙ СИСТЕМЫ С ПОНИЖЕННОЙ ВОСПРИИМЧИВОСТЬЮ К НЕПРЕДНАМЕРЕННЫМ И ПРЕДНАМЕРЕННЫМ ПОМЕХАМ | 2006 |
|
RU2419804C2 |

