ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к магнитно-резонансной визуализации, в частности к источникам питания для градиентных катушек магнитного поля систем магнитно-резонансной визуализации.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
При магнитно-резонансной визуализации (MRI) градиентный усилитель обычно используется для обеспечения тока для трех градиентных катушек магнитного поля, чтобы обеспечить трехмерное пространственное кодирование спинов атомов, расположенных в магнитном поле.
Эти градиентные усилители обычно характеризуются высокой пиковой мощностью (от нескольких 100кВ до 2МВ для нынешних образцов) и высокой точностью созданных форм кривой тока. Схемы, содержащие последовательно соединенные полные мосты, использующие широтно-импульсную модуляцию (PWM), используются для создания градиентных усилителей.
Эта топология схемы известна под несколькими именами, такими как "расположенные друг над другом H-мосты", "расположенные каскадом H-мосты", или "расположенный каскадом многосекционный преобразователь". Градиентные усилители известного уровня техники представляют собой переключаемые усилители, содержащие последовательности H-мостов с твердотельными переключателями.
Принципиальная схема в области силовой электроники представляет собой классический переключательный элемент. Классический переключательный элемент обычно обсуждается с использованием идеальных переключателей. Однако более практичное выполнение использует биполярный транзистор с изолированным затвором (IGBT) с антипараллельными диодами в качестве переключателей.
Классический переключательный элемент используется для управления потоком мощности и тем самым обменом энергией между двумя системами. Два переключателя работают так, что нагрузка соединяется либо с положительной, либо отрицательной клеммой источника напряжения. Переключатели работают таким образом, что строго один из них замкнут в любое время. Замыкание обоих переключателей запрещается, так как это будет создавать короткое замыкание в источнике напряжения и тем самым возможно вызывать неограниченный поток тока; размыкание обоих переключателей будет препятствовать протеканию тока от источника тока справа, возможно вызывая неограниченный рост напряжения. Два пусковых сигнала управляют состоянием двух переключателей так, что когда пусковой сигнал равен 1, переключатель замыкается, и когда пусковой сигнал равен 0, тогда переключатель размыкается. За счет ограничения, обсуждаемого выше, два пусковых сигнала представляют собой логические инверсии друг друга. Отметим, что это очень общая и концептуальная схема: в зависимости от полярности напряжения V и тока I поток мощности может быть либо в одном, либо в другом направлении.
Совокупность двух переключателей IGBT определяется как плечо фазы; происхождение этого названия объясняется тем, что три из этих схем необходимы для создания трехфазного инвертора источника напряжения, который в настоящее время представляет собой предпочтительную схему для приведения в действие индукционных двигателей средней мощности (приблизительно 100 Вт-1 МВт).
Наиболее распространенный путь заключается в том, что единственное плечо фазы используется для управления потоком мощности между двумя соединенными системами путем использования широтно-импульсной модуляции (PWM). Наиболее простым примером PWM является случай, когда два стробирующих сигнала проявляют повторяемый характер во времени. Первый стробирующий сигнал пускается и проводится в интервале δTk, а второй стробирующий сигнал пускается в смежном интервале (1- δ)Tk, где Tk обозначает интервал повторяемости. Временной интервал δTk также может быть выражен, как процент от времени, за которое строб пускается в течение одного периода цикла PWM.
Для систем магнитно-резонансной визуализации H-мосты переключаются при фиксированной частоте, например, 20 кГц между первым и вторым состоянием переключения. Затраченное время в каждом из двух состояний переключения определяет усредненное по времени выходное напряжение. Переключатели IGBT частично имеют потери переключения (например, 50%) и частично потери проводимости (также 50%). Переключатели IGBT переключаются непрерывно. Минимальное значение частоты переключения необходимо для достижения некоторой ширины полосы частот.
В J. Sabatze et al., "High-Power High-Fidelity Switching Amplifier Driving Gradient Coils for MRI Systems," 35th Annual IEEE Power Electronics Specialists Conference, 2004, страницы 261-266, раскрывает способ управления H-мостами в источнике питания градиентной катушки с возможностью уменьшать потери переключения. В данной статье два высоковольтных моста, питаемых напряжением 800 В, не являются импульсно-модулированными и обеспечивают только напряжение, при необходимости более 400 В. Когда их не используют, они остаются в неограниченной модели без выходного напряжения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение обеспечивает источник питания градиентной катушки, способ работы источника питания градиентной катушки, компьютерный программный продукт и систему магнитно-резонансной визуализации в независимых пунктах формулы изобретения. Варианты выполнения представлены в зависимых пунктах формулы изобретения.
Ограничение, насколько большую мощность или насколько большой ток RMS схема H-моста может подавать, как часть подачи питания градиентной катушки, определяется величиной тепла, которое она может рассеивать. Переключение H-мостов с фиксированной частотой ведет к фиксированным потерям переключения в схеме H-моста. Даже если схема H-моста подает только низкое усредненное по времени напряжение, потери переключения будут идентичны случаю, когда H-мост обеспечивает усредненное по времени напряжение, близкое к его максимуму. В связи с этим, техническая проблема заключается в увеличении тока RMS, подаваемого H-мостом или источником питания градиентной катушки.
Варианты выполнения изобретения могут обеспечивать уменьшение потерь переключения в градиентном усилителе и/или замену потери переключения на рассеивание проводимости. В некоторых вариантах выполнения это может быть достигнуто изменением способа переключения H-мостов. В некоторых вариантах выполнения схемы H-моста обычно приводятся в действие переключением между первым и вторым режимом переключения. Это соответствует способу работы схемы H-моста с использованием обычной широтно-импульсной модуляции. Однако H-мосты также могут переключаться в альтернативный рабочий режим, в котором источник напряжения H-моста только проводит ток и не обеспечивает напряжение. Схема H-моста может быть оставлена в этом состоянии для охлаждения. Если это выполняется с различными схемами H-моста в источнике питания градиентной катушки, суммарная рабочая температура схем H-моста может быть уменьшена. Это обеспечивает увеличенный ток RMS, подаваемый источником питания градиентной катушки.
Данные магнитно-резонансной визуализации (MRI) определяются здесь как записываемые измерения радиочастотных сигналов, испускаемых спинами атомов, антенной магнитно-резонансного устройства во время сканирования магнитно-резонансной визуализации. Изображение магнитно-резонансной визуализации (MRI) определяется здесь как реконструированная двух или трехмерная визуализация структурных данных, содержащихся в магнитно-резонансных данных. Эта визуализация может быть выполнена с использованием компьютера.
Машиночитаемый носитель данных, который используется здесь, представляет собой любой носитель данных, который может хранить инструкции, которые способны выполняться процессором вычислительного устройства. Машиночитаемый носитель данных может быть машиночитаемым невременным носителем данных. Машиночитаемый носитель данных также может быть материальным машиночитаемым носителем. В некоторых вариантах выполнения машиночитаемый носитель данных также может быть способен хранить данные, к которым имеется доступ процессором вычислительного устройства. Примеры машиночитаемого носителя данных включают в себя, но не ограничиваясь: флоппи-диск, накопитель на магнитном жестком диске, твердотельный жесткий диск, флэш-память, флеш-накопитель USB, память с произвольным доступом (RAM), постоянную память (ROM), оптический диск, магнитно-оптический диск и регистровый файл процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и универсальные цифровые диски (DVD), например, CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R диски. Термин машиночитаемый носитель данных также относится к различным типам носителя записи, причем доступ к нему вычислительное устройство имеет с помощью сети или линии связи. Например, данные могут быть извлечены через модем, через интернет или через локальную сеть.
Память компьютера представляет собой пример машиночитаемого носителя данных. Память компьютера представляет собой любую память, к которой имеется непосредственный доступ процессора. Примеры памяти компьютера включают, но не ограничиваясь: RAM память, регистры и регистровые файлы.
Накопитель компьютера представляет собой пример машиночитаемого носителя данных. Накопитель компьютера представляет собой любой энергонезависимый машиночитаемый носитель данных. Примеры накопителя компьютера включают в себя, но не ограничиваясь: накопитель на жестком диске, флеш-накопитель USB, накопитель на гибких магнитных дисках, смарт-карту, DVD, CD-ROM и твердотельный накопитель на жестком диске. В некоторых вариантах выполнения накопитель компьютера также может быть памятью компьютера или наоборот.
"Процессор", который используется здесь, включает электронный компонент, который способен выполнять выполняемую программой или машиной инструкцию. Ссылка на "процессор" должна быть интерпретирована, как возможно содержащий более чем один процессор. Термин "процессор" также должно быть интерпретировано, как возможность относится к сборке или сети вычислительных устройств, каждое содержащее процессор. Многие программы имеют инструкции, выполняемые множественными процессорами, которые могут находиться внутри одного и того же вычислительного устройства или которые даже могут распределяться по всему множественному вычислительному устройству.
"H-мост", который используется здесь, включает электрическую схему с источником напряжения и четырьмя переключательными элементами, которые используются для соединения источника напряжения с выводами схемы H-моста. Переключательные элементы позволяют переключать полярность на выводе напряжения схемой H-моста.
В одном аспекте изобретение обеспечивает источник питания градиентной катушки для системы магнитно-резонансной визуализации. Источник питания градиентной катушки представляет собой источник питания, выполненный с возможностью обеспечивать напряжение в катушках градиентной катушки магнитно-резонансной визуализации. При выполнении ссылки на катушку градиентной катушки магнитно-резонансной визуализации понятно, что катушка в действительности содержит множественные катушки. Обычно три набора катушек используются для создания градиента магнитного поля в трех направлениях. Часто эти направления ортогональны друг другу.
Источник питания градиентной катушки содержит по меньшей мере две схемы H-моста. Схемы H-моста соединены последовательно. Каждая схема H-моста подает напряжение первой полярности, находясь в первом состоянии переключения. Каждая схема H-моста подает напряжение второй полярности, когда H-мост находится во втором состоянии переключения. Каждая схема H-моста не подает напряжение, находясь в третьем состоянии переключения. Каждая схема H-моста не подает напряжение, находясь в четвертом состоянии переключения. Схема H-моста способна проводить ток, находясь в третьем и четвертом состоянии переключения.
Схемы H-моста содержат источник напряжения и четыре переключательных элемента, которые позволяют источнику напряжения соединяться с выводами схемы H-моста либо прямо, либо обратно смещенными. По существу схемы H-моста используются для соединения источника напряжения прямо или обратно смещенным образом. Магнитное поле, созданное градиентной катушкой магнитно-резонансной визуализации, зависит от тока, текущего через градиентную катушку. Переключением схемы H-моста между различными состояниями ток через градиентную катушку может регулироваться. Таким образом, имеется эффект управления магнитным полем, созданным градиентной катушкой.
Источник питания градиентной катушки дополнительно содержит контроллер для управления переключением схем H-моста. По существу контроллер решает, каким будет состояние каждой схемы H-моста из четырех состояний. Контроллер выполнен с возможностью принимать последовательность градиентных импульсов. Последовательность градиентных импульсов, которая используется здесь, представляет собой зависящий от времени способ действий, возбуждающий градиентную катушку магнитно-резонансной визуализации. Например, последовательность градиентных импульсов может быть заданным током, текущим через градиентные катушки, как функция времени. Подобным образом, последовательность градиентных импульсов также может быть записана в показателях магнитного поля, созданного градиентными катушками магнитно-резонансной визуализации. Контроллер дополнительно выполнен с возможностью создания плана переключения для управления переключением переключающих блоков в каждой из схем H-моста. По существу план переключения представляет собой план для управления, каким будет состояние каждой схемы H-моста из четырех состояний переключения каждой схемы H-моста как функция времени.
В некоторых вариантах выполнения контроллер может содержать принимающее средство для приема последовательности градиентных импульсов. В некоторых вариантах выполнения контроллер может содержать средство создания плана переключения для создания плана переключения для управления переключением каждой из схем H-моста.
План переключения содержит инструкции для управления выводом источника питания градиентной катушки изменением между первым состоянием переключения и вторым состоянием переключения. План переключения дополнительно содержит приведение в действие по меньшей мере одной схемы H-моста, выбранной из схем H-моста либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схему H-моста. Во время нормальной работы схемы H-моста переключаются между первым и вторым состояниями. Это позволяет управлять током, подаваемым в градиентные катушки источником питания градиентной катушки.
Схемы H-моста имеют два типа механизмов потерь во время работы. Первый представляет собой потери проводимости. Они представляют собой потери, подобные нормальным омическим потерям, когда ток проходит через переключательные элементы каждой из схем H-моста. Также когда переключательный элемент изменяется от одного состояния в другое, имеются дополнительные потери. Вводя схему H-моста либо в третье, либо в четвертое состояние в течение заданного количества времени, ток просто проводится через схему H-моста, которая находится в третьем или четвертом состоянии, при этом отсутствуют дополнительные потери переключения. Это является предпочтительным, так как схемы H-моста могут эффективно охлаждаться.
В другом варианте выполнения план переключения дополнительно содержит переключение схемы H-моста при измененной частоте между первым и вторым состояниями переключения. В этом варианте выполнения форма волны, которая создается схемой H-моста, изменяется. Это является предпочтительным, так как частота переключения схем H-моста может быть адаптирована к требованию формы волны. Для определенных последовательностей импульсов действующая форма волны последовательности импульса не является критической, но целостность тока является. Например, переключением схемы H-моста при измененной частоте частота может быть уменьшена для поддержания целостности тока. Это позволяет работать схеме H-моста на более низкой частоте, а также позволяет схеме H-моста охлаждаться. Это может позволять подавать дополнительный ток схемой H-моста.
Вариант выполнения, в котором план переключения дополнительно содержит переключение схемы H-моста при измененной частоте между первым и вторым состоянием переключения также может быть выполнен в качестве отдельного способа. Это означает, что этот способ может быть выполнен без приведения в действие по меньшей мере одной схемы H-моста, выбранной из схем H-моста, либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схему H-моста. Выполнение варианта выполнения, в котором план переключения дополнительно содержит переключение схемы H-моста при измененной частоте между первым и вторым состоянием переключения является, предпочтительным для выполнения сам по себе, так как это уменьшает потери переключения в отдельных схемах H-моста.
В другом варианте выполнения контроллер дополнительно выполнен с возможностью изменения частоты для минимизации потерь переключения в схеме H-моста и увеличения максимального среднеквадратичного тока, проводимого схемой H-моста. По существу потери переключения могут быть уменьшены уменьшением частоты, при которой схема H-моста переключается. Если контроллер способен принимать последовательность градиентных импульсов и далее преобразовывать их, он таким образом имеет тот же эффект во время магнитно-резонансной визуализации, однако с более медленной частотой переключения, при этом потери переключения будут уменьшаться. Это может позволять схемам H-моста подавать большую мощность до того, как они становятся перегретыми. В некоторых вариантах выполнения контроллер может содержать средство изменения частоты для изменения частоты для минимизации потери переключения в схеме H-моста.
Вариант выполнения, в котором контроллер дополнительно выполнен с возможностью изменения частоты для минимизации потерь переключения в схеме H-моста и увеличения максимального среднеквадратичного тока, проводимого схемой H-моста, также может быть выполнен в качестве отдельного способа. Это означает, что этот способ может быть выполнен без приведения в действие по меньшей мере одной схемы H-моста, выбранной из схем H-моста, либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схему H-моста. Выполнение варианта выполнения, в котором контроллер дополнительно выполнен с возможностью изменения частоты для минимизации потерь переключения в схеме H-моста и увеличения максимального среднеквадратичного тока, проводимого схемой H-моста, является предпочтительным для выполнения сам по себе, так как это уменьшает потери переключения в отдельных схемах H-моста.
В другом варианте выполнения контроллер дополнительно выполнен с возможностью определения минимальной ширины полосы частот для последовательности градиентных импульсов. План переключения дополнительно содержит регулирование измененной частоты выше минимального порога. Минимальный порог представляет собой минимальную частоту для получения минимальной ширины полосы частот. В этом варианте выполнения минимальная ширина полосы частот представляет собой ширину полосы частот, которая необходима для того, чтобы последовательность импульса имела эквивалентный эффект на магнитных спинах. Эффект ограничения ширины полосы частот эквивалентен разложению последовательности градиентных импульсов на компоненты Фурье и далее удалению этих компонентов выше граничной частоты. Это, разумеется, влияет на форму волны и заставляет резкие переходы становиться более постепенными. Однако, если граничная частота является достаточно высокой, тогда это не будет иметь место для многих последовательностей градиентных импульсов. В некоторых вариантах выполнения контроллер может содержать средство определения ширины полосы частот для определения минимальной ширины полосы частот для последовательности градиентных импульсов.
Вариант выполнения, в котором контроллер дополнительно выполнен с возможностью определять минимальную ширину полосы частот для последовательности градиентных импульсов, также может быть выполнен, как отдельный способ. Это означает, что этот способ может быть выполнен без приведения в действие по меньшей мере одной схемы H-моста, выбранной из схем H-моста, либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схему H-моста. Выполнение варианта выполнения, в котором контроллер дополнительно выполнен с возможностью определять минимальную ширину полосы частот для последовательности градиентных импульсов, является предпочтительным для выполнения сам по себе, так как это уменьшает потери переключения в отдельных схемах H-моста.
В другом варианте выполнения последовательность импульсов задает зависящий от времени ток трапецеидальной формы. Трапецеидальная форма задает период времени, в который задается постоянный ток. Например, ток может увеличиваться и поддерживаться высоким и далее уменьшаться снова, как функция времени. Постоянный ток может быть соизмерим с этим высоким значением. План переключения дополнительно содержит уменьшение измененной частоты в этот период времени. Это является предпочтительным, так как напряжение и ток через градиентные катушки не изменяются в период времени, когда установлен постоянный ток. Этот вариант выполнения имеет преимущество в том, что измененная частота уменьшается. Это уменьшает потери переключения и позволяет охлаждать H-мосты.
Некоторые наблюдения за последовательностями импульсов градиентной катушки:
- Почти все формы волны в MR основаны на трапецоидах.
- Наиболее важное требование для большинства трапецоидов представляет собой точность и воспроизводимость градиентной области. Точная форма является менее проблемной.
- Важна форма градиентов считывания.
- На протяжении плоской части трапецоида усилитель нуждается только в подаче низкого напряжения.
- Многие наклоны имеют максимальную скорость нарастания напряжения, которая соответствует максимальному напряжению усилителя.
В этом варианте выполнения идея заключается в уменьшении потерь переключения для того, чтобы обеспечивать более высокие потери проводимости, т.е. увеличивать ток (RMS). Это может быть выполнено для некоторых частей градиентных форм волны. Это может быть осуществлено наличием усилителя с переменным режимом работы, управляемого контроллером.
Вариант выполнения, в котором последовательность импульса задает зависящий от времени ток трапецеидальной формы, также может быть выполнен, как отдельный способ. Это означает, что этот способ может быть выполнен без приведения в действие по меньшей мере одной схемы H-моста, выбранной из схем H-моста, либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схему H-моста. Осуществление варианта выполнения, в котором последовательность импульса задает зависящий от времени ток трапецеидальной формы, является предпочтительным для выполнения сам по себе, так как это уменьшает потери переключения в отдельных схемах H-моста.
В другом варианте выполнения план переключения дополнительно содержит фиксирование схемы H-моста в первом или втором состоянии переключения в течение периода времени. Схемы H-моста, в настоящее время используемые в уровне техники, переключаются между первым и вторым состояниями. Обычно задается рабочий цикл. Этот рабочий цикл имеет некоторый минимум или максимум. По сравнению с этим вариантом выполнения особая схема H-моста фиксируется в первом или втором состоянии переключения в течение периода времени. Схема H-моста далее может подавать напряжение постоянно и не иметь потерь переключения. Это также значит, что схемы H-моста способны подавать больший диапазон напряжений. Причина состоит в том, что участок напряжения пропускается за счет минимального или максимального рабочего цикла схем H-моста в текущем состоянии уровня техники.
План переключения дополнительно содержит установку от одной до всех, но одной из схем H-моста либо в первом или втором состоянии переключения в течение фиксированного периода времени. Оставшиеся схемы H-моста могут быть переключены при измененной частоте. План переключения дополнительно содержит переключение схемы H-моста при измененной частоте между первым и вторым состоянием переключения. Фиксированный период времени больше периода измененной частоты. Этот вариант выполнения имеет преимущество в обеспечении большего диапазона напряжения, чем при переключении всех схем H-моста. Это происходит за счет ранее отмеченного максимального и/или минимального рабочего цикла.
Вариант выполнения, в котором план переключения дополнительно содержит фиксирование схемы H-моста в первом или втором состоянии переключения в течение периода времени, также может быть выполнен, как отдельный способ. Это означает, что этот способ может быть выполнен без приведения в действие по меньшей мере одной схемы H-моста, выбранной из схем H-моста, либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схему H-моста. Выполнение варианта выполнения, в котором план переключения дополнительно содержит фиксирование схемы H-моста в первом или втором состоянии переключения в течение периода времени, является предпочтительным для выполнения сам по себе, так как это уменьшает потери переключения в отдельных схемах H-моста.
В другом варианте выполнения первый, второй, третий и четвертый блоки переключения представляют собой блоки переключения IGBT.
В другом варианте выполнения каждый H-мост содержит источник напряжения. Каждый H-мост также содержит первый блок переключения, второй блок переключения, третий блок переключения и четвертый блок переключения. Могут быть использованы либо твердотельные, либо механические блоки переключения. Однако обычно используются твердотельные или основанные на транзисторах блоки переключения. Когда H-мост находится в первом состоянии переключения первый и четвертый блоки переключения замкнуты, а второй и третий блоки переключения разомкнуты. Когда H-мост находится во втором состоянии переключения второй и третий блоки переключения замкнуты, а второй и третий блоки переключения разомкнуты. Когда схема H-моста находится в третьем состоянии переключения, третий и четвертый блоки переключения разомкнуты, а первый и второй блоки переключения замкнуты. Когда схема H-моста находится в четвертом состоянии переключения, третий и четвертый блоки переключения замкнуты, а первый и второй блоки переключения разомкнуты.
В другом варианте выполнения каждая из схем H-моста имеет первый и второй выводы. Каждый блок переключения имеет первое соединение и второе соединение. Первое соединение H-моста первого блока переключения соединено с первым выводом схемы H-моста. Второе соединение первого блока переключения соединено с первым соединением второго блока переключения. Второе соединение второго блок переключения соединено со вторым выводом схемы H-моста. Первое соединение третьего блока переключения соединено с первым выводом схемы H-моста. Второе соединение третьего блока переключения соединено с первым соединением четвертого блока переключения. Второе соединение четвертого блока переключения соединено со вторым выводом. Каждый источник напряжения содержит первый вывод напряжения и второй вывод напряжения. Первый вывод напряжения соединен со вторым соединением первого блока переключения. Второй вывод напряжения соединен со вторым выводом третьего блока переключения.
В другом аспекте изобретение обеспечивает способ работы градиентной катушки для системы магнитно-резонансной визуализации. Источник питания градиентной катушки содержит по меньшей мере две схемы H-моста. Схемы H-моста соединены последовательно. Каждая схема H-моста подает напряжение первой полярности, находясь в первом состоянии переключения, и каждая схема H-моста подает напряжение второй полярности, когда H-мост находится во втором состоянии переключения. Каждая схема H-моста не подает напряжение, находясь в третьем состоянии переключения. Каждая схема H-моста не подает напряжение, находясь в четвертом состоянии переключения. Способ содержит этап, на котором принимают последовательность градиентных импульсов.
Способ дополнительно содержит этап, на котором создают план переключения для управления переключением блоками переключения в каждой из схем H-моста. План переключения содержит управление выводом напряжения источника питания градиентной катушки посредством изменения между первым состоянием переключения и вторым состоянием переключения. План переключения дополнительно содержит приведение в действие по меньшей мере одной схемы H-моста, выбранной из схем H-моста, либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схемы H-моста. Способ дополнительно содержит этап, на котором реализуют план переключения. Преимущества этого обсуждались ранее.
В другом варианте выполнения план переключения дополнительно содержит переключение схемы H-моста при измененной частоте между первым и вторым состоянием переключения.
В другом аспекте изобретение обеспечивает компьютерный программный продукт, содержащий выполняемые машиной инструкции для выполнения процессором блока управления источника питания градиентной катушки для системы магнитно-резонансной визуализации. Компьютерный программный продукт может, например, быть инструкциями, хранящимися на машиночитаемом носителе данных. Источник питания градиентной катушки содержит по меньшей мере две схемы H-моста. Схемы H-моста соединены последовательно. Каждая схема H-моста подает напряжение первой полярности, находясь в первом состоянии переключения, и схема H-моста подает напряжение второй полярности, когда H-мост находится во втором состоянии переключения. Каждая схема H-моста не подает напряжение, находясь в третьем состоянии переключения. Каждая схема H-моста не подает напряжение, находясь в четвертом состоянии переключения. Все же следует отметить, что в третьем и четвертом состояниях переключения схема H-моста способна проводить ток. Это означает, что третье и четвертое состояния переключения не разомкнуты. Выполняемые машиной инструкции заставляют процессор выполнять этап приема последовательности градиентных импульсов.
Выполняемые машиной инструкции дополнительно заставляют процессор выполнять этап создания плана переключения для управления переключением блоков переключения в каждой из схем H-моста. План переключения содержит управление выводом напряжения источника питания градиентной катушки посредством изменения между первым состоянием переключения и вторым состоянием переключения. План переключения дополнительно содержит приведение в действие по меньшей мере одной схемы H-моста, выбранной из схем H-моста, либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схему H-моста. Выполняемые машиной инструкции дополнительно заставляют процессор выполнять этап реализации плана переключения. Преимущества этого обсуждались ранее.
В другом аспекте изобретение обеспечивает систему магнитно-резонансной визуализации. Система магнитно-резонансной визуализации содержит магнит магнитно-резонансной визуализации. Магнит магнитно-резонансной визуализации используется для выравнивания спинов поляризуемых атомных ядер в пределах зоны визуализации магнита. Система магнитно-резонансной визуализации дополнительно содержит радиочастотную систему для получения магнитно-резонансных данных. Радиочастотная система выполнена с возможностью соединения с радиочастотной антенной. В некоторых вариантах выполнения радиочастотная система может содержать средство соединения радиочастотной антенны для соединения с радиочастотной антенной. Радиочастотная система использует радиочастотные передачи для управления ориентацией магнитных спинов в пределах зоны визуализации. Радиочастотная система также измеряет радиоизлучения теми же ядрами, что и средства получения магнитно-резонансных данных. Система магнитно-резонансной визуализации дополнительно содержит источник питания градиентной катушки согласно варианту выполнения изобретения. Источник питания градиентной катушки магнитного поля выполнен с возможностью подавать ток в градиентную катушку магнитного поля. Система магнитно-резонансной визуализации дополнительно содержит градиентную катушку магнитного поля. Система магнитно-резонансной визуализации дополнительно содержит компьютерную систему, выполненную с возможностью создания изображений из магнитно-резонансных данных и для управления работой системы магнитно-резонансной визуализации. Компьютерная система выполнена с возможностью создания магнитно-резонансного изображения объекта, использующего магнитно-резонансные данные.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее, предпочтительные варианты выполнения изобретения будут описаны исключительно путем примера и со ссылкой на чертежи, среди которых:
Фиг. 1 показывает схему соединений источника питания градиентной катушки;
Фиг. 2 показывает схему соединений схем H-моста в разных состояниях переключения;
Фиг. 3 показывает график ширины импульсов в зависимости от выходного сигнала напряжения схемы H-моста;
Фиг. 4 показывает схему, которая иллюстрирует, как максимальное напряжение может быть увеличено удержанием одного или более H-мостов в первом или втором состоянии;
Фиг. 5 иллюстрирует преимущество работы H-мостов при более низкой частоте переключения;
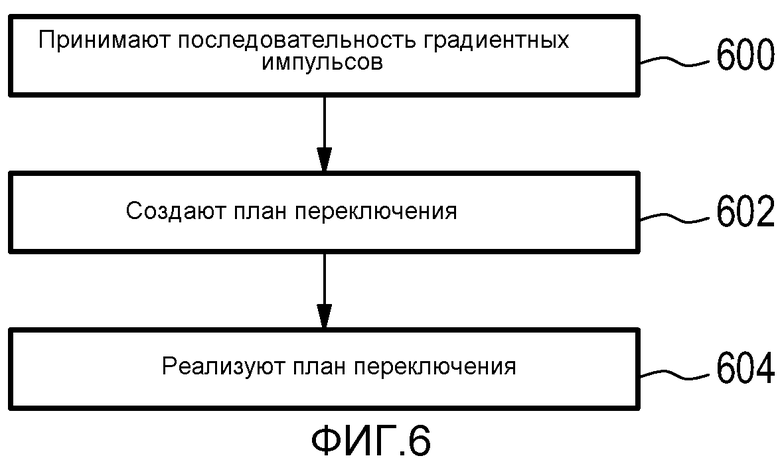
Фиг. 6 показывает блок-схему, которая иллюстрирует способ согласно варианту выполнения изобретения;
Фиг. 7 показывает блок-схему, которая иллюстрирует дополнительный способ согласно варианту выполнения изобретения; и
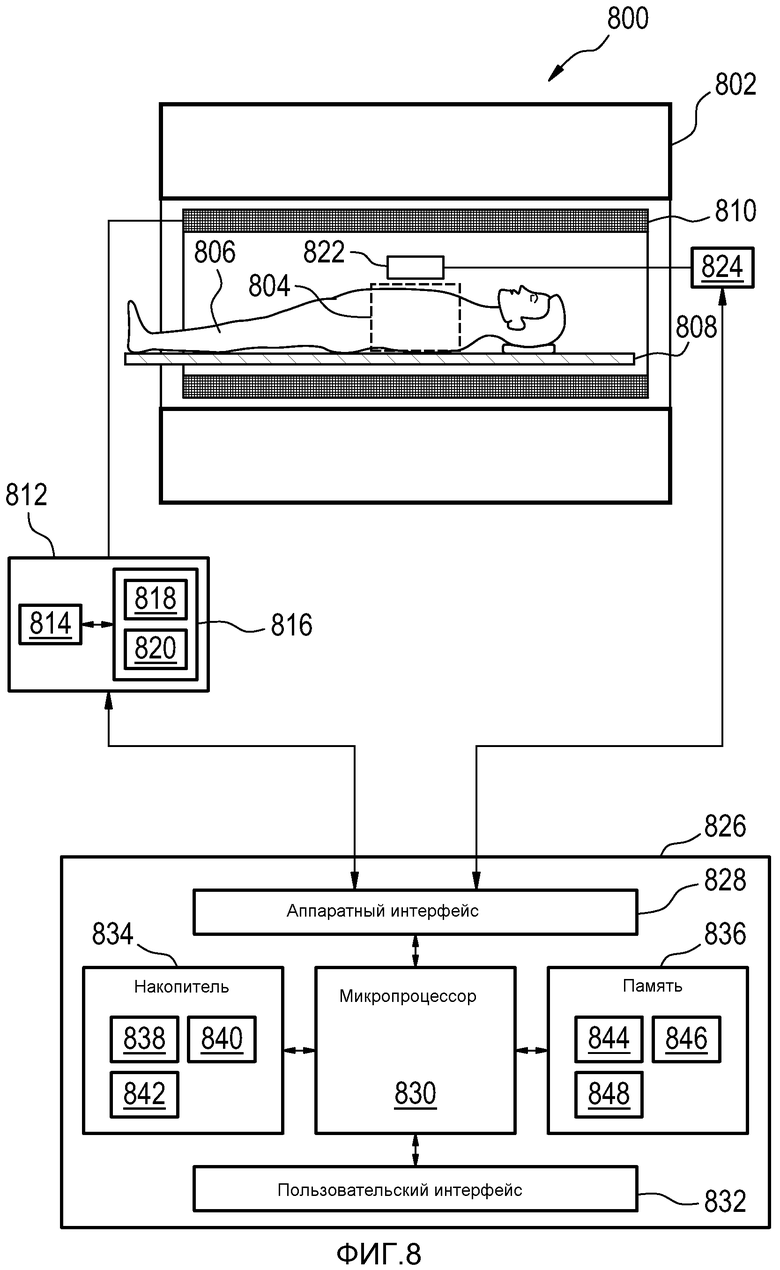
Фиг. 8 показывает систему магнитно-резонансной визуализации согласно варианту выполнения изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Одинаково обозначенные элементы в этих фигурах являются либо эквивалентными элементами, либо выполняют одинаковую функцию. Элементы, которые обсуждались ранее, нет необходимости обсуждать в последних фигурах, если их функция эквивалентна.
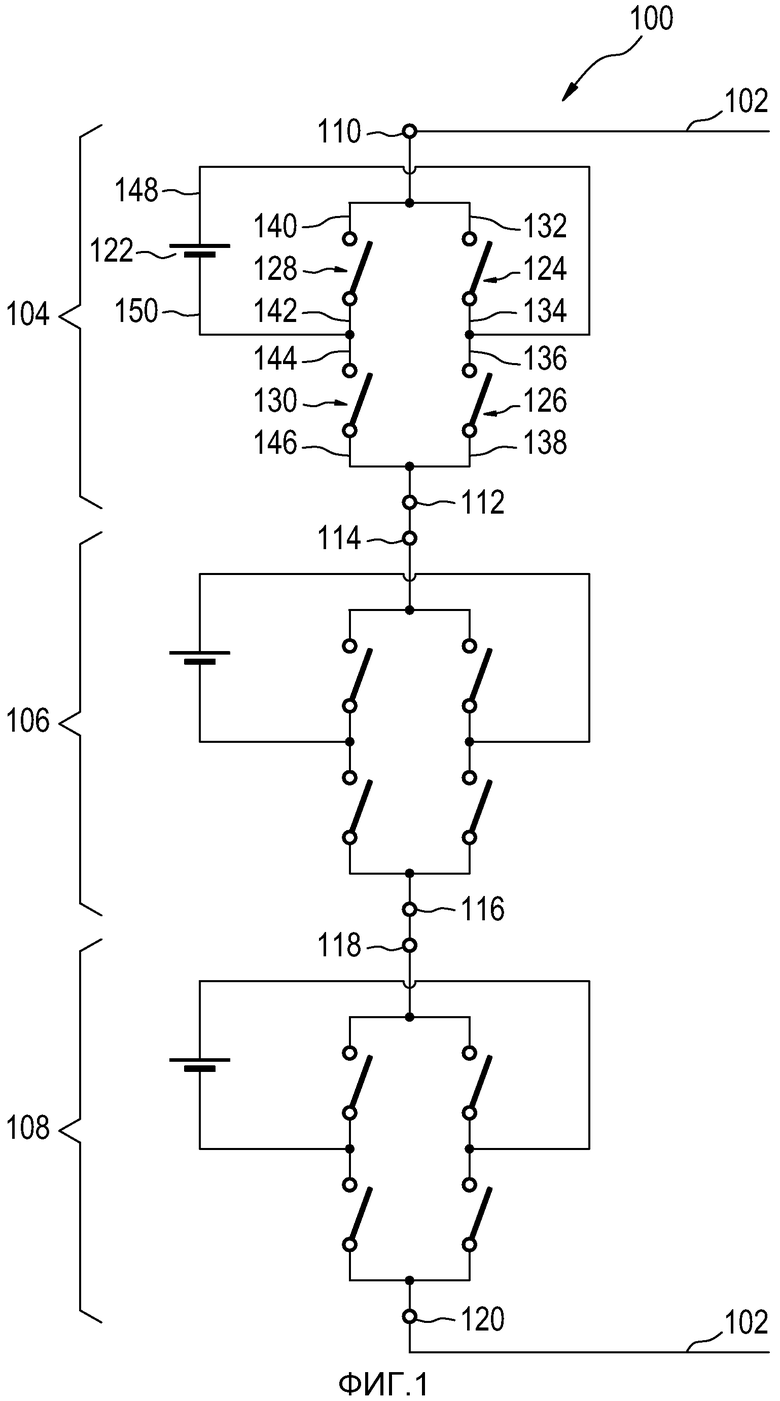
Фиг. 1 показывает схему соединений источника 100 питания градиентной катушки согласно варианту выполнения изобретения. В варианте выполнения, показанном на Фиг. 1, схема для выполнения управления схемами H-моста не показана. Подобным образом показан только один источник напряжения. Для системы магнитно-резонансной визуализации обычно будет представлен один источник напряжения для трех различных ортогональных направлений. Источник питания градиентной катушки показан как имеющий два вывода или соединения 102 с градиентной катушкой. Между соединениями с градиентной катушкой 102 имеется три схемы 104, 106, 108 H-моста. Здесь представлена первая схема 104 H-моста, вторая схема 106 H-моста и третья схема 108 H-моста. Каждая из схем 104, 106, 108 H-моста имеет первый вывод 110, 114 118 и второй вывод 112, 116 120. Три схемы 104, 106, 108 H-моста показаны соединенными последовательно. Первый вывод 110 первой схемы H-моста соединен с одним из соединений 102 с градиентной катушкой. Второй вывод 112 первой схемы H-моста соединен с первым выводом 114 второй схемы H-моста. Второй вывод 116 второй схемы H-моста соединен с первым выводом 118 третьей схемы H-моста. Второй вывод 120 третьей схемы H-моста соединен с другим соединением 102 с градиентной катушкой.
Компоненты первой схемы 104 H-моста обозначены. Первая схема 104 H-моста содержит источник 122 напряжения, первый блок 124 переключения, второй блок 126 переключения, третий блок 128 переключения и четвертый блок 130 переключения. Источник 122 напряжения и каждый из блоков 124, 126, 128, 130 переключения имеет первое и второе соединения. Первое соединение 132 первого блока переключения соединено с первым выводом 110 первой схемы 104 H-моста. Второе соединение 134 первого блока 124 переключения соединено с первым соединением 136 второго блока 126 переключения. Второе соединение 138 второго блока 126 переключения соединено со вторым выводом 122 первой схемы 104 H-моста. Первое соединение 140 третьего блока 128 переключения соединено с первым выводом 110 первой схемы 104 H-моста. Второе соединение 142 третьего блока 128 переключения соединено с первым соединением 144 четвертого блока 130 переключения. Второе соединение 146 второго блока 130 переключения соединено со вторым выводом 112 первой схемы 104 H-моста. Первый вывод 148 источника 122 напряжения соединен со вторым соединением 134 первого блока 124 переключения. Второй вывод 150 источника 122 напряжения соединен со вторым соединением 142 третьего блока 128 переключения. Может быть видно на этой принципиальной схеме, что блоки 124, 126, 128, 130 переключения позволяют источнику 122 напряжения соединяться с первым и вторым выводами 110, 114 первой схемы 104 H-моста с либо одной, либо другой полярностью. Блоки 124, 126, 128, 130 переключения также могут быть использованы для короткого замыкания первого и второго выводов 110, 112 первой схемы 104 H-моста. Вторая 106 и третья 108 схемы H-моста имеют компоненты, которые аналогичны компонентам первой схемы 104 H-моста. Варианты выполнения изобретения применимы, когда имеются две или более схем H-моста. Вариант выполнения на Фиг. 1 показывает три схемы 104, 106, 108 H-моста. Однако изобретение не ограничивается случаем только трех схем H-моста. Изобретение применимо и к меньшим, и к большим цепям схем H-моста, соединенных последовательно.
Фиг. 2 показывает схему соединений схем H-моста в различных состояниях переключения. Схема 200 H-моста находится в первом состоянии переключения. Схема 202 H-моста находится во втором состоянии переключения. Схема 204 H-моста находится в третьем состоянии переключения. И схема 206 H-моста находится в четвертом состоянии переключения. Для схемы 200 H-моста может быть видно, что первый блок 124 переключения и четвертый блок 130 переключения замкнуты, а второй 126 и третий 128 блоки переключения разомкнуты. Может быть видно, что для блока 202 переключения первый 124 и четвертый 130 блоки переключения разомкнуты. Второй 126 и третий 128 блоки переключения замкнуты. Для блоков переключения, обозначенных 200 и 202, может быть видно, что источник 122 напряжения соединен с выводами каждой из схем 200, 202 H-моста. Однако, полярность вывода напряжения с помощью схем 200, 202 Н-моста в каждом случае меняется.
Для схем 204 и 206 H-моста источник 122 напряжения отсоединен от вывода схемы H-моста. Например, в схеме 204 H-моста в третьем состоянии переключения первый и второй блоки 124, 126 переключения замкнуты. Третий и четвертый блоки 128, 130 переключения разомкнуты. Это имеет эффект отсоединения источника 122 напряжения. Подобным образом для схемы H-моста в четвертом состоянии 206 переключения третий и четвертый блоки 128, 130 переключения замкнуты, а первый 124 и второй 126 блоки переключения разомкнуты. Это также имеет эффект отсоединения источника 122 напряжения от выводов схемы 206 H-моста.
Переключатели могут быть использованы в двух различных состояниях, в которых источник 122 напряжения не соединен с выводами схемы H-моста: третье состояние 204 переключения с замкнутыми переключателями 124 и 126 (и разомкнутыми переключателями 128 и 130) и четвертое состояние 206 переключения с замкнутыми переключателями 128 и 130 (и разомкнутыми переключателями 124 и 126). В одном из этих двух состояний 204, 206 переключения Н-мост не передает напряжение. Он обеспечивает лишь прохождение тока. H-мост может переключаться между этими режимами при достаточно низкой частоте или может быть установлен в одном состоянии переключения для градиентного трапецоида и в другом состоянии переключения для следующего трапецоида. Переключение конкретного H-моста между третьим состоянием 204 переключения и четвертым состоянием переключения позволяет распределять тепло между всеми переключателями.
Третье состояние 204 переключения и четвертое состояние 206 переключения соответствуют состоянию "отсутствия напряжения" H-моста. Первое состояние 200 переключения и второе состояние 202 переключения соответствуют состоянию "напряжения" H-моста. Когда H-мост фиксируется в состоянии "отсутствия напряжения" потери переключения отсутствуют. В случае усилителя с тремя мостами два из них могут находиться в состоянии "отсутствия напряжения", тогда как третий - в состоянии "напряжения". Мост, который находится в состоянии "напряжения", может циклически изменяться.
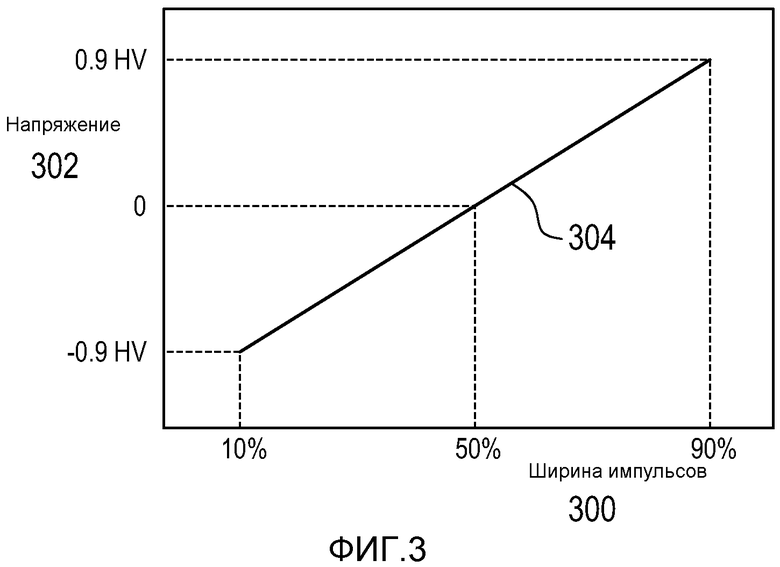
Фиг. 3 показывает график ширины 300 импульсов в зависимости от выходного сигнала 302 напряжения схемы H-моста. Схема H-моста переключается между первым состоянием 200 переключения и вторым состоянием 202 переключения. Ширина 300 импульса задается, как процент коэффициента заполнения, использованного в первом состоянии 200 переключения. "HV" для обозначений на оси напряжения обозначает вывод напряжения источника напряжения H-моста. Например, 0,9 HV составляет 90% напряжения схемы H-моста. Напряжение 302 представляет собой средний по времени выходной сигнал напряжения посредством схемы H-моста. Может быть видно на Фиг. 3, что если ширина импульсов ограничена между 10 и 90%, далее напряжение может иметь значение только в диапазоне между -0,9 HV и 0,9 HV.
Фиг. 3 иллюстрирует, как вывод напряжения схемы H-моста ограничивается, когда схема H-моста колеблется между первым и вторым состоянием переключения. Если схема H-моста может поддерживаться либо в первом, либо втором состоянии переключения, тогда напряжение может иметь значение в диапазоне между -1 и 1 HV.
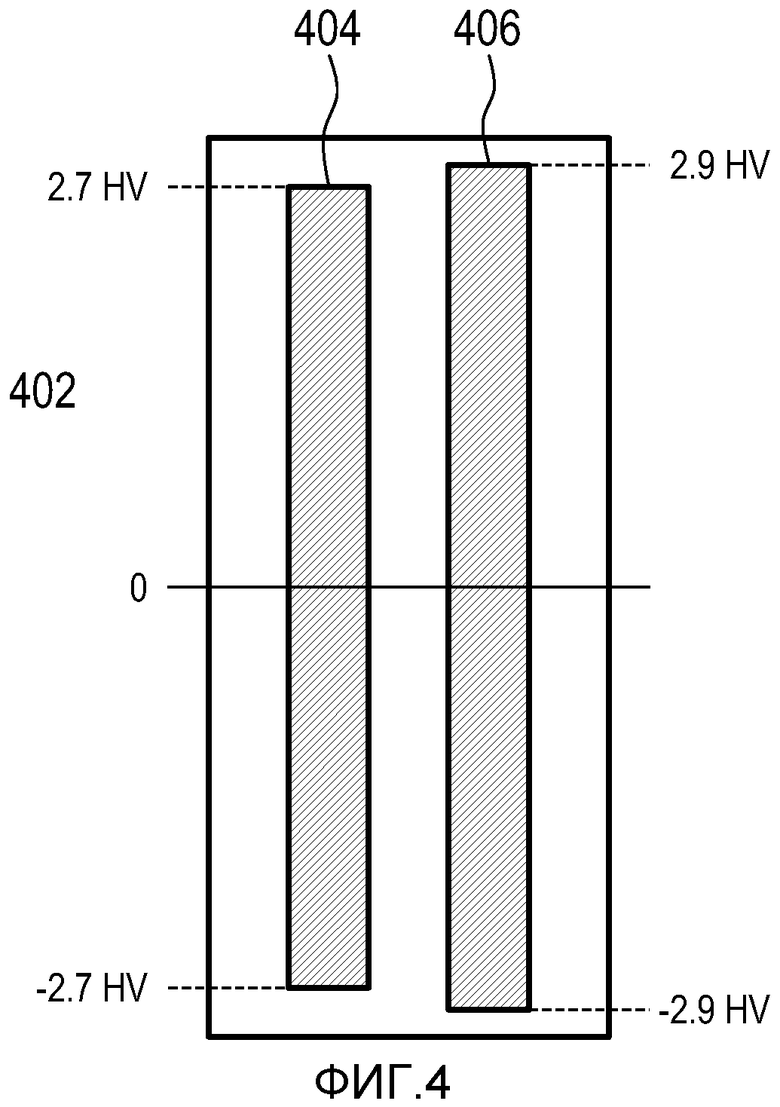
Фиг. 4 показывает схему, которая иллюстрирует, как максимальное напряжение может быть увеличено удержанием одного или более H-мостов в первом или втором состоянии. На Фиг. 4 выборка, обозначенная позицией 402, показывает диапазон напряжения или средний по времени диапазон напряжения, который способен создаваться цепью из трех последовательных схем H-моста. Для этого примера предполагается, что схемам H-моста необходимо работать с шириной импульсов или коэффициентом заполнения, который принимает значение в диапазоне между 10 и 90%. Полоса, обозначенная позицией 404, показывает диапазоны среднего по времени напряжения 402, которое может быть создано тремя схемами H-моста, которые колеблются между первым и вторым состояниями. Вторая полоса 406 показывает диапазон напряжения, который является достигаемым, когда одна или две схемы H-моста могут поддерживаться в первом или втором состоянии. В этом примере мы видим, что полоса 404 принимает значение в диапазоне между -0,27 HV и 2,7 HV. Для полосы 406 напряжение принимает значение в диапазоне между -2,9 HV и 2,9 HV. В результате, мы можем видеть, что поддержание одной или двух схем H-моста в первом или втором состоянии обеспечивает больший диапазон напряжения. Также когда схемы H-моста удерживаются в особом состоянии, потери переключения отсутствуют. Это значит, что имеется меньше потерь энергии, а также меньше нагревания в блоке переключения.
Многие наклоны находятся близко к максимальному напряжению. В таком случае 2 из 3 мостов могут быть установлены в одном из первого или второго состояний переключения. Третий мост 'переключается' с некоторый шириной импульсов для подачи напряжения со значением между -0,9 HV и 0,9 HV. Мосты, которые зафиксированы в состоянии "напряжения", не имеют потерь переключения.
Как пример: первые H-мосты могут быть зафиксированы в конкретном состоянии "напряжения", то есть первом состоянии 200 переключения или втором состоянии 202 переключения на Фиг. 2. Второй H-мост может быть установлен в режиме "отсутствия напряжения", то есть в третьем состоянии 204 переключения и четвертом состоянии 206 переключения на Фиг. 2. Третья схема H-моста может переключаться с определенной шириной импульсов между первым состоянием 200 переключения и вторым состоянием 202 переключения. Касательно переключения с некоторой шириной импульсов, три моста способны создавать напряжение между -1,9 HV и 1,9 HV с низкими потерями переключения. Максимальный ток RMS, который может быть подан этой схемой, может быть увеличен циклическим изменением того, какие из схем H-моста фиксируются в состоянии "напряжения", в состоянии "отсутствия напряжения", и какие переключаются между первым состоянием 200 переключения и вторым состоянием 202 переключения. Ток RMS может быть увеличен, так как H-мосты поочередно нагреваются и охлаждаются, что приводит к более низкой рабочей температуре. Когда схема H-моста находится в состоянии "отсутствия напряжения", H-мост может дополнительно переключаться между третьим 204 и четвертым 206 состояниями переключения. Преимущество этого подхода заключается в том, что суммарное напряжение является более высоким. Два моста создают напряжение HV, а третий один имеет максимальное напряжение 0,9 HV. Суммарное напряжение составляет 2,9 HV. В случае известного уровня техники, где переключаются все мосты, максимальное выходное напряжение составляет 2,7 HV.
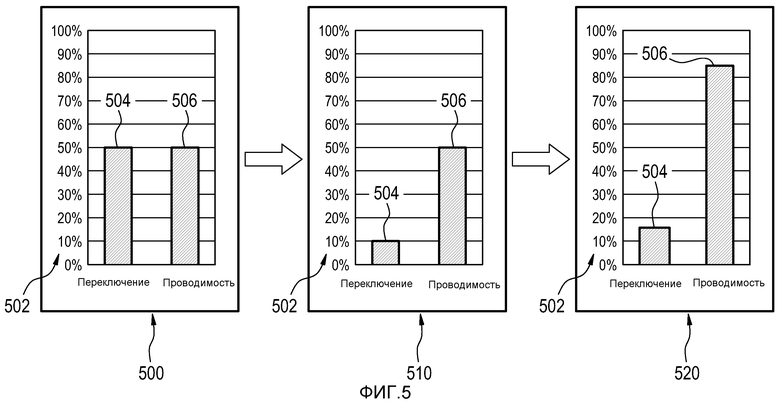
Фиг. 5 иллюстрирует преимущество работы H-мостов при более низкой частоте переключения. Фиг. 5 показывает три графика 500, 510, 520. В каждом из этих трех графиков y-ось обозначена позицией 502. Y-ось 502 показывает процентное содержание потери энергии за счет потерь 504 переключения и потерь 506 проводимости. Для твердотельных схем H-моста имеется максимальная тепловая мощность. Максимальная потеря 100% будет представлять потерю, которая создает максимальное количество тепла, обеспеченное для твердотельного блока переключения схемы H-моста для целесообразного функционирования. В этом примере на Фиг. 5 позиция 500 показывает пример, в котором потери из-за переключения 504 и проводимости 506 равны. В варианте выполнения изобретения скорость переключения уменьшается. Это приводит к выполнению того, что ток, созданный в градиентной катушке, подает последовательность градиентных импульсов менее точно, но во многих ситуациях последовательность импульсов для градиентной катушки все же функционирует целесообразно. На Фиг. 5 позиция 510 скорость переключения уменьшена, таким образом потери переключения уменьшаются от 50% до 10%. В примере, показанном на Фиг. 5 позицией 510 показано, что потери мощности составляет 60% максимально возможной потери мощности. Это значит, что максимальный ток, который может быть проведен схемой H-моста, может быть увеличен. На Фиг. 5 с помощью позиции 520 мы можем видеть, что потери проводимости увеличиваются до 85%, и потери переключения увеличиваются до 15%. Это иллюстрирует преимущество работы схем H-моста при уменьшенной частоте. Эффект уменьшения схемы H-моста при более низкой частоте имеет эффект удаления более высоких гармоник из создаваемой формы волны градиентного тока. Для многих промышленных источников питания градиентной катушки они переключаются при частоте 25 кГц. Потери переключения прямо пропорциональны частоте, с которой выполняется переключение. Например, если частота переключения уменьшается до 10 кГц от 25 кГц, потери переключения будут уменьшаться до 40% от того, что было ранее.
Главное требование для диффузионных градиентов представляет собой фиксированную градиентную область. При этом отсутствуют строгие требования к точности/плоскостности/и т.д. формы волны. Это также представляет собой случай, например, фазокодирующих градиентов, разрушающих градиентов.
Это значит, что усилителю не нужно передавать высокую ширину полосы частот во время этих фаз сканирования, что обеспечивает низкую частоту переключения. Некоторые из H-мостов даже могут быть переключены в режиме холостого хода. Режим холостого хода - это состояние, в котором H-мост переключается не активно, то есть H-мост зафиксирован в состоянии "напряжения" или "отсутствия напряжения".
Фиг. 6 показывает блок схему, которая иллюстрирует способ согласно варианту выполнения изобретения. Этот способ может быть использован для программирования контроллера или компьютера. Например, для создания машиночитаемого носителя данных, который содержит инструкции для выполнения этого способа. На этапе 600 принимают последовательность градиентных импульсов. На этапе 602 создают план переключения. План переключения представляет собой схему для работы различных блоков переключения схем H-моста, которые содержат источник питания градиентной катушки. На этапе 604 реализуют план переключения.
Контроллер также может быть расположен в источнике питания градиентной катушки. Когда этот контроллер принимает запрашиваемую форму волны с конкретной формой волны, он может выполнять 'оперативный' план переключения с возможностью приближаться к этой форме волны.
Фиг. 7 показывает блок-схему, которая иллюстрирует дополнительный вариант выполнения способа согласно варианту выполнения изобретения. Подобно Фиг. 7 способ может быть осуществлен контроллером или он также может быть осуществлен в качестве компьютерного программного продукта или машиночитаемого носителя данных. На этапе 700 принимают последовательность градиентных импульсов. На этапе 702 создают план переключения. На этапе 704 реализуют план переключения. После выполнения плана переключения множество блоков демонстрируют различные действия, которые могут быть выполнены во время выполнения способа. Схемы H-моста могут быть переключены между различными режимами работы. Например, на этапе 706 H-мост переключается между первым и вторым состоянием. Во время выполнения части плана переключения частота 708 переключения уменьшается между первым и вторым состоянием в период времени, когда установлен постоянный ток.
Во время выполнения конкретного плана переключения множество различных действий может быть выполнено одной или более схемами H-моста. Например, на этапе 710 по меньшей мере один H-мост работает в третьем или четвертом режимах переключения. Другой режим работы, который возможен во время выполнения схемы 702 переключения, протекает, когда во время создания плана переключения определяется минимальная ширина 712 полосы частот для последовательностей импульсов. Далее на этапе 714 H-мосты переключаются между первым и вторым состояниями при измененной частоте для получения минимальной ширины полосы частот. На этапе 716 иллюстрируется другой набор операций. На этапе 716 все, кроме одной схемы H-моста переключаются в первое или второе состояние. На этапе 718 оставшиеся H-мосты переключаются при измененной частоте между первым и вторым состоянием.
Способ, проиллюстрированный на Фиг. 7, также может быть разбит на отдельные способы. Этапы 700, 702, 704, 706 и 708 могут составлять один способ. Этапы 700, 702, 704 и 710 могут составлять другой способ. Этапы 700, 702, 704, 712 и 714 могут составлять уже другой способ. Этапы 700, 702, 704, 716 и 718 могут составлять еще один другой способ. Дополнительные способы могут быть выполнены объединением любых двух или трех из этих четырех способов.
Фиг. 8 показывает систему 800 магнитно-резонансной визуализации согласно варианту выполнения изобретения. Система магнитно-резонансной визуализации содержит магнит 802. Магнит 802 имеет зону 804 визуализации, в которой магнитное поле является существенно однородным, достаточным для выполнения магнитно-резонансной визуализации. Объект 806 показан имеющим участок внутри зоны 804 визуализации. Объект 806 лежит на опоре 808 объекта. Градиентная катушка 810 магнитного поля показана находящейся внутри отверстия магнита 802. Градиентная катушка 810 соединяется с источником 812 питания градиентной катушки. Источник питания градиентной катушки показан имеющим процессор 814, который способен управлять работой схем H-моста. Схемы H-моста не показаны в этой иллюстрации.
Источник 812 питания градиентной катушки также содержит память 816, которая является доступной для процессора 814. В этом примере память содержит последовательность 818 импульсов градиентной катушки и компьютерный программный продукт 820. Компьютерный программный продукт 820 имеет модули программного обеспечения, которые способны интерпретировать последовательности 818 импульсов градиентной катушки и создавать план переключения. План переключения может создаваться и храниться в памяти 816, она также может храниться в памяти процессора 814, или она может быть создана оперативно. План переключения также может быть создана оперативно, и устройство контроля тока может быть использовано для контроля тока, подаваемого градиентной катушкой 810 магнитного поля. В этом случае план переключения может быть вычислен или адаптирован динамически.
Также показана радиочастотная антенна 822. Она может быть одиночной антенной и для приема, и для передачи сигналов магнитно-резонансной визуализации или может быть отдельными катушками передачи и приема. Радиочастотная антенна 822 показана соединенной с трансивером 824. Он может быть отдельными устройствами передачи и приема или может быть использован одиночный трансивер 824.
Источник питания 812 градиентной катушки и трансивер 824 показаны соединенными с аппаратным интерфейсом 828 компьютерной системы 826. В этом случае компьютерная система 826 управляет работой и функцией системы магнитно-резонансной визуализации. Компьютер 826 имеет процессор 830, накопитель 834 компьютера, память 836 компьютера и пользовательский интерфейс 832. Пользовательский интерфейс 832 позволяет оператору приводить в действие систему магнитно-резонансной визуализации 800, а также для системы магнитно-резонансной визуализации отображать или представлять магнитно-резонансные данные.
Накопитель 834 компьютера может содержать магнитно-резонансные данные 838, которые были получены с использованием системы 800 магнитно-резонансной визуализации. Также один или более магнитно-резонансных изображений 840 могут храниться в накопителе 834. Эти изображения реконструируются из магнитно-резонансных данных 838 визуализации. Также одна или более последовательностей 842 импульсов могут храниться в этом накопителе 834. Последовательности импульсов представляют собой инструкции, которые используются для получения магнитно-резонансных данных 838. В памяти 836 располагаются инструкции, которые используются для управления работой системы магнитно-резонансной визуализации. Например, может иметься модуль 844 управления магнитно-резонансной системой, который используется для управления и приведения в действие системы 800 магнитно-резонансной визуализации. Также может иметься программное обеспечение для реконструкции магнитно-резонансных данных 838 визуализации в магнитно-резонансные изображения 840. Модуль 846 реконструкции изображения используется для реконструкции магнитно-резонансных изображений 840. Также может иметься программное обеспечение в памяти 836, которое используется для управления источником 812 питания градиентной катушки. Например, может иметься управляющий модуль 848 источника питания градиентной катушки. Функции управления работой источника 812 питания градиентной катушки могут быть выполнены либо процессором в источнике 814 питания градиентной катушки и/либо процессором 830 в компьютере 826.
Тогда, как изобретение проиллюстрировано и описано подробно на чертежах и вышеупомянутом описании, такая иллюстрация и описание должны рассматриваться иллюстративными или примерными и не ограничивающими; изобретение не ограничивается раскрытыми вариантами выполнения.
Другие варианты раскрытых вариантов выполнения могут быть понятны и осуществлены специалистом в области техники при выполнении заявленного изобретения при изучении чертежей, описания и приложенной формулы изобретения. В формуле изобретения слово "содержащий" не исключает других элементов или этапов. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам по себе тот факт, что некоторые измерения перечислены в пунктах с множественной зависимостью формулы изобретения, не указывает на то, что совокупность этих измерений не может быть использована с пользой. Компьютерная программа может храниться/распространяться на целесообразном носителе, таком как оптический носитель данных или твердотельный носитель, поставляемый вместе с или как часть другого аппаратного обеспечения, но также может распространяться в других формах, например, с помощью интернета или других проводных или беспроводных телекоммуникационных систем. Любые ссылочные позиции в формуле изобретения не должны подразумеваться, как ограничивающие объем охраны.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
100 источник питания градиентной катушки
102 соединение с градиентной катушкой
104 первая схема H-моста
106 вторая схема H-моста
108 третья схема H-моста
110 первый вывод первой схемы H-моста
112 второй вывод первой схемы H-моста
114 первый вывод второй схемы H-моста
116 второй вывод второй схемы H-моста
118 первый вывод третьей схем Н-моста
120 второй вывод третьей схемы H-моста
122 источник напряжения
124 первый блок переключения
126 второй блок переключения
128 третий блок переключения
130 четвертый блок переключения
132 первый вывод первого блока переключения
134 второй вывод первого блока переключения
136 первый вывод второго блока переключения
138 второй вывод второго блока переключения
140 первый вывод третьего блока переключения
142 второй вывод третьего блока переключения
144 первый вывод четвертого блока переключения
146 второй вывод четвертого блока переключения
148 первый вывод источника напряжения
150 второй вывод источника напряжения
200 схема H-моста в первом состоянии переключения
202 схема H-моста во втором состоянии переключения
204 схема Н-моста в третьем состоянии переключения
206 схема Н-моста в четвертом состоянии переключения
800 система магнитно-резонансной визуализации
802 магнит
804 зона визуализации
806 объект
808 опора объекта
810 градиентная катушка магнитного поля
812 источник питания градиентной катушки
814 процессор
816 память
818 последовательность импульсов градиентной катушки
820 компьютерный программный продукт
822 радиочастотная антенна
824 трансивер
826 компьютер
828 аппаратный интерфейс
830 процессор
832 пользовательский интерфейс
834 накопитель
836 память
838 магнитно-резонансные данные
840 магнитно-резонансное изображение
842 последовательность импульсов
844 управляющий модуль магнитно-резонансной системы
846 модуль реконструкции изображения
848 управляющий модуль источника питания градиентной катушки.

Группа изобретений относится к магнитно-резонансной визуализации, в частности к источникам питания для градиентных катушек магнитного поля систем магнитно-резонансной визуализации. Источник питания градиентной катушки для системы магнитно-резонансной визуализации, содержащий: по меньшей мере две схемы H-моста; схемы H-моста соединены последовательно; каждая из схем H-моста подает напряжение первой полярности, находясь в первом состоянии переключения; каждая схема H-моста подает напряжение второй полярности, когда H-мост находится во втором состоянии переключения; каждая схема H-моста не подает напряжение, находясь в третьем состоянии переключения; каждая схема H-моста не подает напряжение, находясь в четвертом состоянии переключения; и контроллер для управления переключением схем H-моста, причем контроллер выполнен с возможностью: приема последовательности градиентных импульсов; создания плана переключения для управления переключением каждой из схем H-моста; план переключения содержит управление выводом напряжения источника питания градиентной катушки посредством изменения между первым состоянием переключения и вторым состоянием переключения; план переключения дополнительно содержит приведение в действие по меньшей мере одной схемы H-моста, выбранной из схем H-моста, либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схему H-моста; реализации плана переключения. Технический результат - увеличение тока, подаваемого источником питания градиентной катушке. 4 н. и 10 з.п. ф-лы, 8 ил.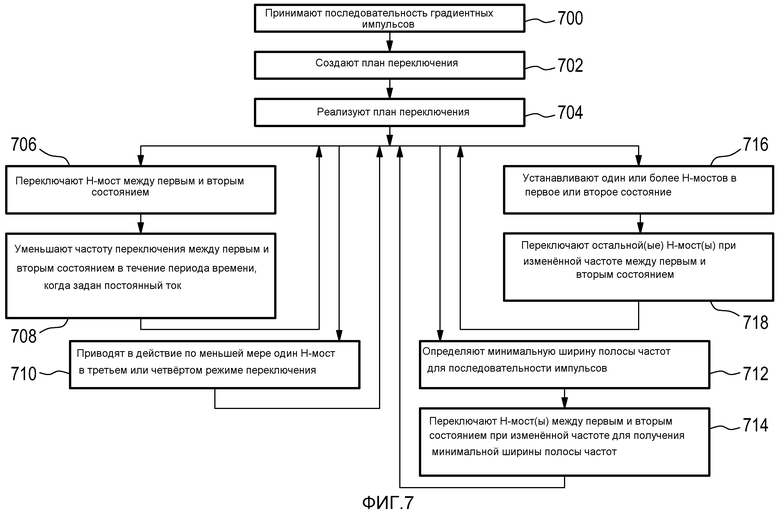
1. Источник питания (100, 812) градиентной катушки для системы (800) магнитно-резонансной визуализации, содержащий:
по меньшей мере две схемы (104, 106, 108, 200, 202, 204, 206) H-моста; причем схемы H-моста соединены последовательно; каждая из схем H-моста подает напряжение первой полярности, находясь в первом состоянии (200) переключения; каждая схема H-моста подает напряжение второй полярности, когда H-мост находится во втором состоянии (202) переключения; каждая схема H-моста не подает напряжение, находясь в третьем состоянии (204) переключения; каждая схема H-моста не подает напряжение, находясь в четвертом состоянии (206) переключения; и заданное количество времени ток проводится через схему Н-моста в третьем и четвертом состояниях переключения, и
контроллер (814) для управления переключением схем H-моста, причем контроллер выполнен с возможностью:
- приема (600, 700) последовательности (818) градиентных импульсов,
- создания (602, 702) плана переключения для управления переключением каждой из схем H-моста, причем план переключения содержит управление выводом напряжения источника питания градиентной катушки посредством изменения между первым состоянием переключения и вторым состоянием переключения, причем план переключения дополнительно содержит приведение в действие (710) по меньшей мере одной схемы H-моста, выбранной из схем H-моста, либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схему H-моста,
- реализации (604, 704) плана переключения.
2. Источник питания градиентной катушки по п. 1, в котором план переключения дополнительно содержит переключение (718) схемы H-моста при измененной частоте между первым и вторым состояниями переключения.
3. Источник питания градиентной катушки по п. 2, в котором контроллер дополнительно выполнен с возможностью изменения частоты для минимизации потерь переключения в схеме H-моста и увеличения максимального среднеквадратичного тока, способного на проведение схемой H-моста.
4. Источник питания градиентной катушки по п. 2 или 3, в котором контроллер дополнительно выполнен с возможностью определения (712) минимальной ширины полосы частот для последовательности импульсов, и в котором план переключения дополнительно содержит регулирование (714) измененной частоты выше минимального порога, причем минимальный порог представляет собой минимальную частоту для получения минимальной ширины полосы частот.
5. Источник питания градиентной катушки по п. 2, в котором последовательность импульсов задает зависящий от времени ток трапецеидальной формы, причем трапецеидальная форма задает период времени, в который задается постоянный ток, и в котором план переключения дополнительно содержит уменьшение (708) измененной частоты в упомянутый период времени.
6. Источник питания градиентной катушки по п. 1, в котором план переключения дополнительно содержит фиксирование (716) схемы H-моста в первом или втором состоянии переключения в течение периода времени.
7. Источник питания градиентной катушки по п. 1, в котором план переключения дополнительно содержит установку (716) по меньшей мере одной из схем H-моста либо в первое, либо во второе состояние переключения в течение фиксированного периода времени, причем план переключения дополнительно содержит переключение (718) остальных схем H-моста при измененной частоте между первым и вторым состояниями переключения, и причем фиксированный период времени больше периода измененной частоты.
8. Источник питания градиентной катушки по п. 1, в котором каждый H-мост содержит источник (122) напряжения, первый блок (124) переключения, второй блок (126) переключения, третий блок (128) переключения и четвертый блок (130) переключения; причем в первом состоянии (200) переключения первый и четвертый блоки переключения замкнуты, и второй и третий блоки переключения разомкнуты; причем схема H-моста находится во втором состоянии переключения (202), когда второй и третий блоки переключения замкнуты, и второй и третий блоки переключения разомкнуты; схема H-моста находится в третьем состоянии (204) переключения, когда третий и четвертый блоки переключения разомкнуты, а первый и второй блоки переключения замкнуты; схема H-моста находится в четвертом состоянии (206) переключения, когда третий и четвертый блоки переключения замкнуты, а первый и второй блоки переключения разомкнуты.
9. Источник питания градиентной катушки по п. 8, в котором первый, второй, третий и четвертый блоки переключения представляют собой блоки переключения IGBT.
10. Источник питания градиентной катушки по п. 9, в котором каждая из схем H-моста имеет первые (110, 114, 118) и вторые (112, 116, 120) выводы; при этом каждый блок переключения имеет первое соединение (132, 136, 140, 144) и второе соединение(134, 138, 142, 146); причем первое соединение (132) первого блока переключения соединено с первым выводом схемы H-моста; второе соединение (134) первого блока переключения соединено с первым соединением (136) второго блока переключения; второе соединение (138) второго блок переключения соединено со вторым выводом схемы H-моста; первое соединение (140) третьего блока переключения соединено с первым выводом схемы H-моста; второе соединение (142) третьего блока переключения соединено с первым соединением (144) четвертого блока переключения; второе соединение (146) четвертого блока переключения соединено со вторым выводом; при этом каждый источник напряжения содержит первый вывод (148) напряжения и второй вывод (150) напряжения; причем первый вывод напряжения соединен со вторым соединением первого блока переключения; и второй вывод напряжения соединен со вторым выводом третьего блока переключения.
11. Способ работы источника (100, 812) питания градиентной катушки для системы (800) магнитно-резонансной визуализации, в котором источник питания градиентной катушки содержит по меньшей мере две схемы (104, 106, 108, 200, 202, 204, 206) H-моста, причем схемы H-моста соединены последовательно; каждая схема H-моста подает напряжение первой полярности, находясь в первом состоянии (200) переключения; каждая схема H-моста подает напряжение второй полярности, когда H-мост находится во втором состоянии (202) переключения; каждая схема H-моста не подает напряжение, находясь в третьем состоянии (204) переключения; каждая схема H-моста не подает напряжение, находясь в четвертом состоянии (206) переключения; и заданное количество времени ток проводится через схему Н-моста в третьем и четвертом состояниях переключения, при этом способ содержит этапы, на которых:
принимают (600, 700) последовательность градиентных импульсов,
создают (602, 702) план переключения для управления переключением блоков переключения в каждой из схем H-моста, причем план переключения содержит управление выводом напряжения источника питания градиентной катушки посредством изменения между первым состоянием переключения и вторым состоянием переключения, причем план переключения дополнительно содержит приведение в действие (710) по меньшей мере одной схемы H-моста, выбранной из схем H-моста, либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схему H-моста,
реализуют (604, 704) план переключения.
12. Способ по п. 1, в котором план переключения дополнительно содержит этап, на котором переключают (718) схему H-моста при измененной частоте между первым и вторым состоянием переключения.
13. Машиночитаемый носитель данных, содержащий сохраненные на нем выполняемые машиной инструкции для выполнения процессором (814) блока управления источника (100, 812) питания градиентной катушки для системы магнитно-резонансной визуализации, причем источник питания градиентной катушки содержит по меньшей мере две схемы (104, 106, 108, 200, 202, 204, 206) схемы H-моста, причем схемы H-моста соединены последовательно; каждая схема H-моста подает напряжение первой полярности, находясь в первом состоянии (200) переключения; каждая схема H-моста подает напряжение второй полярности, когда H-мост находится во втором состоянии (202) переключения; каждая схема H-моста не подает напряжение, находясь в третьем состоянии (204) переключения; каждая схема H-моста не подает напряжение, находясь в четвертом состоянии (206) переключения; и заданное количество времени ток проводится через схему Н-моста в третьем и четвертом состояниях переключения, и при этом выполняемые машиной инструкции заставляют процессор выполнять этапы, на которых:
принимают (600, 700) последовательность градиентных импульсов,
создают (602, 702) план переключения для управления переключением блоков переключения в каждой из схем H-моста, причем план переключения содержит управление выводом напряжения источника питания градиентной катушки посредством изменения между первым состоянием переключения и вторым состоянием переключения, причем план переключения дополнительно содержит приведение в действие (710) по меньшей мере одной схемы H-моста, выбранной из схем H-моста, либо в третьем, либо в четвертом состоянии переключения для части плана переключения, чтобы охладить схему H-моста,
реализуют (604, 704) план переключения.
14. Система (800) магнитно-резонансной визуализации, содержащая:
магнит (802) магнитно-резонансной визуализации;
градиентную катушку (810) магнитного поля;
радиочастотную систему (824) для получения магнитно-резонансных данных, причем радиочастотная система выполнена с возможностью соединения с радиочастотной антенной (822);
источник (100, 812) питания градиентной катушки по любому из пп. 1-10, причем источник питания градиентной катушки магнитного поля выполнен с возможностью подавать ток градиентной катушке магнитного поля; и
компьютерную систему (826), выполненную с возможностью создания изображений (840) из магнитно-резонансных данных (838) и с возможностью управления работой системы магнитно-резонансной визуализации.
| Способ определения степени загрузки двигателя внутреннего сгорания с турбонаддувом | 1985 |
|
SU1352258A1 |
| Синтезатор частот | 1981 |
|
SU987818A1 |
| WO 2001038894 A1, 31.05.2001 | |||
| Способ автоматической регулировки затухания абонентской линии | 1946 |
|
SU73762A1 |

