Изобретение относится к магнитно-резонансной визуализации, в частности, к источникам питания для катушек градиентного магнитного поля в системах магнитно-резонансной визуализации.
УРОВЕНЬ ТЕХНИКИ
В магнитно-резонансной визуализации (MRI) градиентные усилители типично используют для того, чтобы подавать ток на катушки градиентного магнитного поля, чтобы обеспечивать пространственное кодирование спинов атомов, располагаемых в магнитном поле. Эти градиентные усилители типично отличаются высокой пиковой мощностью и высокой воспроизводимостью генерируемых форм кривой тока.
Значительная доля MRI сканирований может требовать только скорости нарастания генерируемых форм кривой тока ниже, чем скорость нарастания, изначально предусмотренная системой MRI. Для этих сканирований снижают начальную скорость нарастания.
В патенте США 5646835 раскрыт последовательный резонансный преобразователь, который управляемый напряжением генератор и запаздывание по фазе для того, чтобы управлять переключением (управление отпиранием IGBT) для того, чтобы отвечать на меняющиеся требования по нагрузке.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача вариантов осуществления изобретения состоит в том, чтобы предоставить способ подачи тока на градиентную катушку, систему магнитно-резонансной визуализации, градиентный усилитель и компьютерный программный продукт. Указанную задачу разрешают посредством объекта изобретения по независимым пунктам формулы изобретения. Преимущественные варианты осуществления описаны в зависимых пунктах формулы изобретения.
Специалист в данной области примет во внимание, что аспекты по настоящему изобретению можно осуществлять в виде устройства, способа или компьютерного программного продукта. Соответственно, аспекты по настоящему изобретению могут принимать форму варианта осуществления полностью из аппаратного обеспечения, варианта осуществления полностью из программного обеспечения (включая встроенное программное обеспечение, резидентное программное обеспечение, микропрограмму и т.д.) или варианта осуществления, объединяющего аспекты программного обеспечения и аппаратного обеспечения, которые в целом в настоящем документе можно называть как «схема», «модуль» или «система». Кроме того, аспекты по настоящему изобретению могут принимать форму компьютерного программного продукта, воплощенного в одном или нескольких машиночитаемых носителях, имеющих исполняемый компьютером код, воплощенный в них.
Аспекты по настоящему изобретению описаны со ссылкой на иллюстрации блок-схемы и/или блочные диаграммы способов, устройства (систем) и компьютерных программных продуктов согласно вариантам осуществления изобретения. Понятно, что каждый блок или часть блоков блок-схемы, иллюстраций и/или блочных диаграмм можно реализовать посредством компьютерных программных инструкций в форме исполняемого компьютером кода, когда применимо. Кроме того, понятно, что можно комбинировать, когда не являются взаимоисключающими, комбинации блоков в различных блок-схемах, иллюстрациях и/или блочных диаграммах. Эти компьютерные программные инструкции можно предоставлять процессору компьютера общего назначения, специализированного компьютера или другому программируемому устройству обработки данных, чтобы получать такую машину, что инструкции, которые исполняют посредством процессора компьютера или другого программируемого устройства обработки данных, создают средство для реализации функций/действий, точно определенных в блок-схеме и/или блоке или блоках блочной диаграммы.
Можно использовать любую комбинацию одного или нескольких машиночитаемых носителей. Машиночитаемый носитель может представлять собой машиночитаемый носитель сигнала или машиночитаемый носитель данных. «Машиночитаемый носитель данных», как используют в настоящем документе, охватывает любой материальный носитель данных, который может хранить инструкции, которые исполняет процессор вычислительного устройства. Машиночитаемый носитель данных можно обозначать как машиночитаемый постоянный носитель данных. Машиночитаемый носитель данных также можно обозначать как материальный машиночитаемый носитель. В некоторых вариантах осуществления машиночитаемый носитель данных также может быть способен хранить данные, доступ к которым может осуществлять процессор вычислительного устройства. Примеры машиночитаемых носителей данных включают, но не ограничиваясь этим: гибкий диск, привод магнитного жесткого диска, твердотельный жесткий диск, флэш-память, USB-накопитель, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), оптический диск, магнитооптический диск и файл регистров процессора. Примеры оптических дисков включают компакт-диски (CD) и цифровые универсальные диски (DVD), например, диски CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R. Термин машиночитаемый носитель данных также относится к средам записи различных типов, доступ к которым может осуществлять вычислительное устройство через сеть или канал связи. Например, выборку данных можно осуществлять через модем, через интернет или через локальную сеть. Исполняемый компьютером код, воплощенный в машиночитаемом носителе данных, можно передавать с использованием любого подходящего носителя, включая в качестве неограничивающих примеров беспроводной, проводной, оптоволоконный кабель, РЧ и т.д., или любой подходящей комбинации приведенного выше.
Машиночитаемый носитель сигнала может содержать распространяемый сигнал данных с исполняемым компьютером кодом, воплощенном в нем, например, в основном диапазоне или в качестве части несущей волны. Такой распространяемый сигнал может принимать любую из множества форм, включая в качестве неограничивающих примеров электромагнитную, оптическую или любое подходящее их сочетание. Машиночитаемый носитель сигнала может представлять собой какой-либо машиночитаемый носитель, который не является машиночитаемым носителем данных и который может передавать, распространять или транспортировать программу для использования посредством или применительно к системе, устройству или прибору исполнения инструкций.
«Компьютерная память» или «память» представляет собой пример машиночитаемого носителя данных. Компьютерная память представляет собой какую-либо память, к которой процессор осуществляет непосредственный доступ. «Компьютерный накопитель» или «накопитель» представляет собой дополнительный пример машиночитаемого носителя данных. Компьютерный накопитель представляет собой какой-либо энергонезависимый машиночитаемый носитель данных. В некоторых вариантах осуществления компьютерный накопитель также может представлять собой компьютерную память или наоборот.
«Пользовательский интерфейс», как используют в настоящем документе, представляет собой интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. «Пользовательский интерфейс» также можно обозначать как «человеко-машинный интерфейс». Пользовательский интерфейс может предоставлять информацию или данные оператору и/или принимать информацию или данные от оператора, пользовательский интерфейс может делать возможным ввод от оператора, подлежащий приему компьютером, и может обеспечивать вывод пользователю из компьютера. Другими словами, пользовательский интерфейс может позволять оператору управлять или манипулировать компьютером, и интерфейс может позволять компьютеру показывать эффекты управления или манипуляций оператора. Отображение данных или информации на дисплее или в графическом пользовательском интерфейсе представляет собой пример предоставления информации оператору. Прием данных через клавиатуру, мышь, шаровой манипулятор, сенсорную панель, ручку-указатель, графический планшет, джойстик, игровой джойстик, веб-камеру, головную гарнитуру, рычаг переключения передач, рулевое колесо, педали, проводную перчатку, танцевальную панель, пульт дистанционного управления и датчик ускорения - все являются примерами компонентов пользовательского интерфейса, которые делают возможным прием информации или данных от оператора.
«Аппаратный интерфейс», как используют в настоящем документе, охватывает интерфейс, который позволяет процессору компьютерной системы взаимодействовать с внешним вычислительным прибором и/или устройством и/или управлять им. Аппаратный интерфейс может позволять процессору посылать управляющие сигналы или инструкции на внешнее вычислительное устройство и/или аппарат. Аппаратный интерфейс также может позволять процессору обмениваться данными с внешним вычислительным прибором и/или устройством. Примеры аппаратного интерфейса включают, но не ограничиваясь этим: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, соединение Bluetooth, соединение по беспроводной локальной сети, соединение TCP/IP, соединение Ethernet, интерфейс управляющего напряжения, MIDI интерфейс, аналоговый интерфейс ввода и цифровой интерфейс ввода.
«Процессор», как используют в настоящем документе, охватывает электронный компонент, который способен исполнять программу или исполняемую машиной инструкцию. Ссылки на вычислительное устройство, содержащее «процессор», следует интерпретировать как возможно содержащее больше чем один процессор или ядро процессора. Процессор, например, может представлять многоядерный процессор. Процессор также может относиться к совокупности процессоров, находящейся внутри одной компьютерной системы или распределенной среди множества компьютерных систем. Термин вычислительное устройство также следует интерпретировать как возможно указывающее на совокупность или сеть вычислительных устройств, каждое содержит процессор или процессоры. Многие программы имеют свои инструкции, выполняемые с помощью множества процессоров, которые могут находиться внутри одного и того же вычислительного устройства или которые даже могут быть распределены среди множества вычислительных устройств.
Данные магнитно-резонансного изображения определяют в настоящем документе как измерения радиочастотных сигналов, испускаемых спинами атомов, зарегистрированные с помощью антенны устройства магнитного резонанса во время сканирования магнитно-резонансной визуализации. Изображение магнитно-резонансной визуализации (MRI) определяют в настоящем документе как реконструированную двух- или трехмерную визуализацию анатомических данных, содержащихся в данных магнитно-резонансной визуализации. Эту визуализацию можно осуществлять с использованием компьютера.
«Мост», как используют в настоящем документе, охватывает электрическую схему с источником напряжения и четырьмя переключающими элементами, которые используют для того, чтобы соединять источник напряжения с выходами мостовой схемы. Переключающие элементы позволяют переключать полярность напряжения, выдаваемого мостовой схемой.
В одном из аспектов, изобретение относится к системе магнитно-резонансной визуализации, которая содержит градиентную катушку. Система магнитно-резонансной визуализации дополнительно содержит градиентный усилитель для подачи тока на градиентную катушку. Вывод градиентного усилителя соединяют с градиентной катушкой. Градиентный усилитель содержит источник электропитания для того, чтобы подавать напряжение на первом уровне на вывод градиентного усилителя для того, чтобы генерировать градиентный ток в градиентной катушке для того, чтобы получать градиентное магнитное поле при определенной скорости нарастания. Скорость нарастания устанавливают на первое значение.
Градиентный усилитель дополнительно может содержать силовой электронный блок. Силовой электронный блок содержит конденсатор, который соединяют параллельно с переключающим мостовым силовым каскадом. Переключающий мостовой силовой каскад может охватывать четыре переключающих элемента, которые используют для того, чтобы соединять напряжение с выводом градиентного усилителя. Переключающие элементы позволяют переключать полярность напряжения. Мост может представлять собой, например, мост на полевых транзисторах со структурой металл-оксид-полупроводник (MOSFET) или биполярных транзистора с изолированным затвором (IGBT).
Система магнитно-резонансной визуализации дополнительно содержит контроллер, связанный с источником электропитания. Контроллер адаптируют для того, чтобы повторно устанавливать скорость нарастания на второе значение.
Магнитное поле градиентной катушки имеет зависимость от времени в целом в форме, повторяющей форму трапеции. Соответственно, ток, предоставляемый градиентным усилителем для того, чтобы приводить в действие градиентную катушку, также должен иметь форму трапеции. В плоской верхней части трапеции, т.е., при постоянной амплитуде тока, градиентный усилитель должен компенсировать омические потери в градиентной катушке. Эти потери требуют от градиентного усилителя относительно низкого напряжения. В наклонных частях трапеции ток нарастает при максимальной амплитуде тока. Индуктивность градиентной катушки требует дополнительного напряжения (т.е. напряжения на первом уровне), пропорционального скорости изменения тока. Скорость нарастания, как используют в настоящем документе, относится к скорости изменения амплитуды тока для достижения максимальной амплитуды.
Изменение скорости нарастания можно запускать по различными причинам. Например, скорость нарастания при высоких значениях может вызывать высокие потери в градиентной катушке и в катушке для тела радиочастотной (РЧ) системы. Это ведет к дополнительным акустическим шумам и вибрациям. Более высокий уровень вибрации может вести к пониженной надежности и более высокой вероятности скачков.
Контроллер дополнительно адаптируют для сравнения второго значения с первым значением и управления источником электропитания для того, чтобы регулировать напряжение до второго уровня, если второе значение отличается от первого значения.
Указанные варианты осуществления могут быть полезны, поскольку они только обеспечивают необходимую мощность для того, чтобы получать желаемую скорость нарастания. В том случае, если происходит снижение напряжения (т.е. второе значение скорости нарастания ниже первого значения скорости нарастания), эти варианты осуществления могут быть полезны, поскольку они снижают диссипативные потери при переключении в мостовых схемах и, таким образом, увеличивают максимальный допустимый RMS ток. То есть, в тех сканированиях, которые исходно были ограничены максимальной диссипацией в мосте, например, в диффузионных сканированиях, теперь можно использовать более высокий RMS ток. Например, когда напряжение от источника электропитания подают на половине максимального значения, потери на переключение составляют половину от исходных значений потерь. Тогда полную диссипацию в мосте снижают приблизительно на 25% (полагая, что потери на переключение и потери на электропроводность вносят в равной мере вклад в полную диссипацию). Также, более низкая диссипация ведет к более низкому электропотреблению и, поскольку градиентный усилитель вносит основной вклад в полное энергопотребление, экономия расходов на энергию является значительной. Другое преимущество состоит в том, что в указанных вариантах осуществления можно использовать конструкции с малой стоимостью, для которых необходимы, например, IGBT мосты с низкой номинальной мощностью. Фактически, можно снижать количество кремния в IGBT мосте. В соответствии с приведенными выше числами, количество кремния можно снижать на 25%.
Согласно одному из вариантов осуществления, переустановка происходит перед получением данных системой магнитно-резонансной визуализации. Это может быть полезно, поскольку это дополнительно экономит энергию для того, чтобы получать данные, которая в ином случае потребуется во время сканирования.
Согласно одному из вариантов осуществления, переустановка происходит во время получения данных с помощью системы магнитно-резонансной визуализации. Это может быть полезно, поскольку это может решать проблему, которая может возникать во время получения данных, и не требует прерывания самого получения.
Согласно одному из вариантов осуществления, переустановка включает: определение электрической мощности, рассеиваемой градиентной катушкой, в настоящее время создающей градиентное магнитное поле; и выбор второго значения скорости нарастания из одного или нескольких предварительно определяемых значений скорости нарастания, если рассеиваемая электрическая мощность превышает предварительно определяемое максимально допустимое значение диссипации.
Более высокая диссипация ограничивает число срезов в секунду, которое можно получать с помощью системы MRI. Посредством снижения скорости нарастания можно повышать комфорт пациента и можно увеличивать число срезов, которое можно получать в определенный период времени.
Рассеиваемую электрическую мощность можно вычислять посредством умножения квадрата тока в градиентной катушке на сопротивление обмотки градиентной катушки.
Согласно одному из вариантов осуществления, переустановка включает прием сигнала от субъекта, подлежащего визуализации с помощью системы магнитно-резонансной визуализации. Сигнал отражает физиологический параметр субъекта. Сигнал отражает эфферентный ответ субъекта на градиентное магнитное поле и выбор второго значения скорости нарастания из одного или нескольких предварительно определяемых значений скорости нарастания.
Это также может иметь преимущество повышения комфорта пациента, поскольку это устраняет какую-либо стимуляцию периферических нервов, которую можно запускать с помощью высокой скорости нарастания.
Согласно одному из вариантов осуществления, переустановка включает прием запроса для того, чтобы снижать первое значение скорости нарастания, от пользователя системы магнитно-резонансной визуализации, запрос указывает на второе значение.
Обычно, пользователь на главном компьютере определяет сканирование. Для сканирований различных типов и разрешений предварительно определено использовать скорость нарастания на максимуме, допустимом для системы MRI. Например, EPI сканирование. Однако, пользователь может отклонять это и менять значение скорости нарастания по различным причинам, включая те, которые указаны выше.
Согласно одному из вариантов осуществления, первое значение представляет собой максимальное значение скорости нарастания, допустимое для системы MRI. Максимальная допустимая скорость нарастания (например, 200 Т/м/с) соответствует самой высокой скорости изменения во времени, на которую способен вывод градиентного усилителя.
Согласно одному из вариантов осуществления, напряжение на втором уровне V2 определяют по напряжению на первом уровне V1 с использованием уравнения:
V2=S×V1, где S=max (SR/SRmax, 0,5)
где SR представляет собой второе значение скорости нарастания и SRmax представляет собой максимальное значение скорости нарастания, допустимое для системы MRI.
В другом аспекте изобретение относится к градиентному усилителю для подачи тока на градиентную катушку системы магнитно-резонансной визуализации. Градиентный усилитель имеет выход, который может работать для соединения с градиентной катушкой. Градиентный усилитель содержит источник электропитания для того, чтобы подавать напряжение на первом уровне на вывод градиентного усилителя для того, чтобы генерировать градиентный ток в градиентной катушке для того, чтобы получать градиентное магнитное поле при определенной скорости нарастания. Скорость нарастания устанавливают на первое значение. Градиентный усилитель дополнительно содержит контроллер, соединенный с источником электропитания. Контроллер адаптируют для того, чтобы повторно устанавливать скорость нарастания на второе значение, сравнивать второе значение с первым значением и управлять источником электропитания для того, чтобы регулировать напряжение до второго уровня, если второе значение ниже первого значения.
Согласно одному из вариантов осуществления, второе значение ниже первого значения и напряжение на втором уровне меньше, чем напряжение на первом уровне.
Согласно одному из вариантов осуществления, первое значение представляет собой максимальную скорость нарастания, допустимую для системы MRI.
Согласно одному из вариантов осуществления, напряжение на втором уровне V2 определяют по напряжению на первом уровне V1 с использованием уравнения:
V2=S×V1, где S=max (SR/SRmax, 0,5)
где SR представляет собой второе значение скорости нарастания и SRmax представляет собой максимальную скорость нарастания, допустимую для системы MRI.
Согласно некоторым вариантам осуществления, контроллер представляет собой дополнительный модуль для источника электропитания и/или градиентного усилителя.
В другом аспекте изобретение относится к способу подачи тока на градиентную катушку системы магнитно-резонансной визуализации с помощью градиентного усилителя, способ включает:
подачу, с помощью источника электропитания, напряжения на первом уровне на вывод градиентного усилителя для того, чтобы генерировать градиентный ток в градиентной катушке для того, чтобы получать градиентное магнитное поле при определенной скорости нарастания, где скорость нарастания устанавливают на первое значение,
повторную установку скорости нарастания на второе значение,
сравнение второго значения с первым значением и
регулировку напряжения до второго уровня, если второе значение отличается от первого значения.
В другом аспекте изобретение относится к компьютерному программному продукту, который содержит исполняемые компьютером инструкции, причем исполнение инструкций выполняют для того, чтобы осуществлять этапы способа контроллера, как изложено в приведенных выше вариантах осуществления.
Понятно, что один или несколько указанных выше вариантов осуществления изобретения можно комбинировать до тех, пор пока комбинированные варианты осуществления не являются взаимоисключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее предпочтительные варианты осуществления изобретения описаны более подробно в качестве примера, только со ссылкой на чертежи, на которых:
на фиг. 1 проиллюстрирована система магнитно-резонансной визуализации,
на фиг. 2 представлено схематическое изображение градиентного усилителя,
на фиг. 3 представлен типичный трапециевидный ток через градиентную катушку, и
на фиг. 4 представлена блок-схема способа подачи тока на градиентную катушку системы магнитно-резонансной визуализации с помощью градиентного усилителя.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее элементы со схожими номерами на этих фигурах или представляют собой схожие элементы, или осуществляют эквивалентные функции. Элементы, которые рассмотрены предварительно, не обязательно рассмотрены на последующих фигурах, если функция эквивалентна.
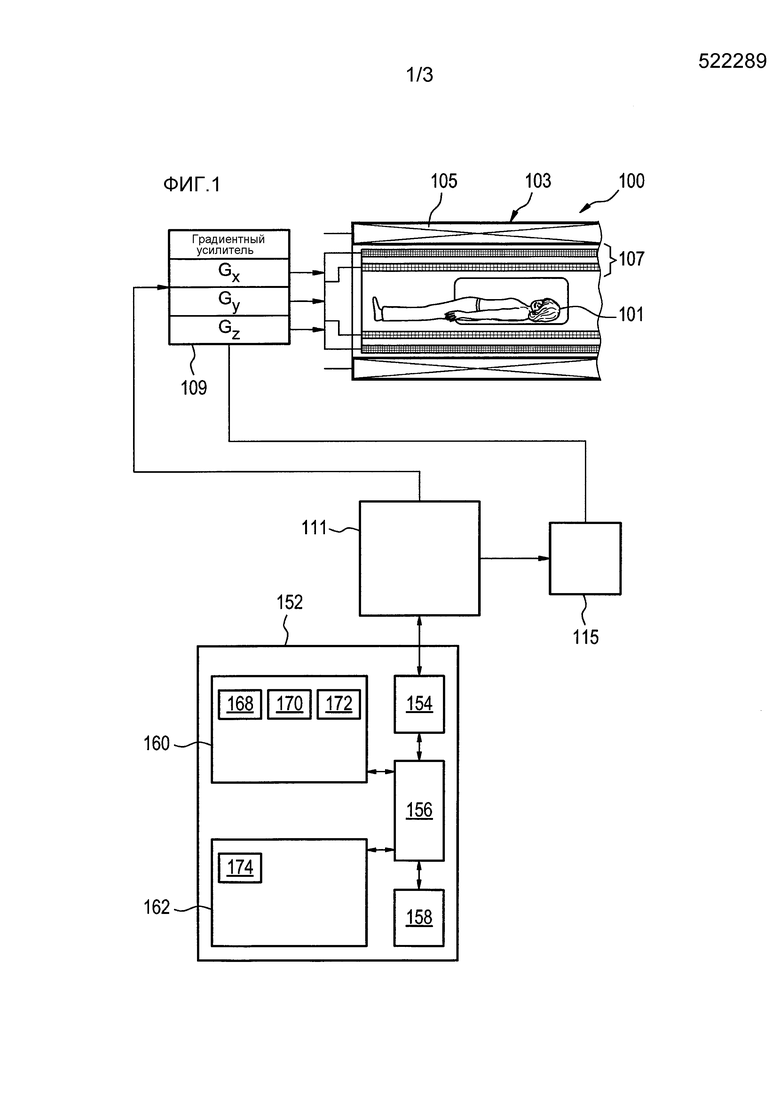
На фиг. 1 проиллюстрирована образцовая система 100 магнитно-резонансной визуализации (MRI) для генерации изображений пациента 101. Система 100 MRI содержит магнитный сборочный узел 103 для того, чтобы генерировать магнитные поля, которые применяют к пациенту 101. Магнитный сборочный узел 103 содержит магнитные катушки 105, выполненные с возможностью создавать статическое магнитное поле, необходимое для того, чтобы осуществлять магнитно-резонансную визуализацию, и градиентные катушки 107. Градиентные катушки 107 состоят из градиентной катушки оси х, градиентной катушки оси у и градиентной катушки оси z. Это позволяет визуализировать различные области пациента 101.
Система 100 MRI дополнительно содержит градиентный усилительный блок 109 и управляющий модуль 111. Градиентный усилительный блок 109 содержит градиентный усилитель Gx оси х, градиентный усилитель Gy оси у и градиентный усилитель Gz оси z. Градиентную катушку 107 соединяют с градиентным усилителем 109. Градиентную катушку оси х, градиентную катушку оси у и градиентную катушку оси z градиентной катушки 107 соединяют, соответственно, с усилителем Gx, усилителем Gy и усилителем Gz градиентного усилителя 109.
Градиентное магнитное поле в направлении оси х, градиентное магнитное поле в направлении оси у и градиентное магнитное поле в направлении оси z формируют, соответственно, посредством электрических токов, подаваемых на градиентную катушку оси х, градиентную катушку оси у и градиентную катушку оси z, соответственно, с усилителя Gx, усилителя Gy и усилителя Gz градиентного усилителя. Управляющий модуль 111 соединяют с градиентным усилителем 109.
Управляющий модуль 111 генерирует управляющие сигналы для управления градиентным усилителем. В частности, управляющий модуль 111 может генерировать управляющие сигналы, которые управляют градиентным усилительным блоком 109 для того, чтобы подавать энергию на градиентные катушки 107.
Контроллер 111 управляет источником электропитания 115. Источник электропитания 115 подает напряжение на градиентный усилитель 109 для того, чтобы генерировать градиентный ток в градиентной катушке 107 для того, чтобы получать градиентное магнитное поле.
Контроллер 111 показан соединенным с аппаратным интерфейсом 154 компьютерной системы 152. В компьютерной системе 152 используют процессор 156 для того, чтобы управлять системой 100 магнитно-резонансной визуализации.
Компьютерная система 152, представленная на фиг. 1, является иллюстративной. Множество процессоров и компьютерных систем можно использовать для того, чтобы представлять функциональность, проиллюстрированную с помощью этой одной компьютерной системы 152. Компьютерная система 152 содержит аппаратный интерфейс 154, который позволяет процессору 156 посылать и принимать сообщения компонентам системы 100 MRI. Процессор 156 также соединяют с пользовательским интерфейсом 158, компьютерным накопителем 160 и компьютерной памятью 162.
Компьютерный накопитель 160 показан содержащим параметры 168 MRI сканирования. Одним из параметров сканирования является скорость нарастания. Значение скорости нарастания может хранить контроллер 113.
Компьютерный накопитель 160 дополнительно показан содержащим импульсную последовательность 170.
Импульсная последовательность 170 или содержит инструкции или содержит временную диаграмму, которую можно использовать в соответствии с параметрами сканирования для создания инструкций, которые позволяют системе 100 магнитно-резонансной визуализации получать данные 172 магнитного резонанса.
Компьютерный накопитель 160 показан хранящим данные 172 магнитного резонанса, полученные с помощью системы 100 магнитно-резонансной визуализации.
Компьютерная память 162 показана содержащей модуль 174. Модуль 174 содержит исполняемый компьютером код, который позволяет процессору 156 управлять работой и функциями системы 100 MRI. Например, модуль 174 может использовать импульсную последовательность 170 для того, чтобы получать данные 172 магнитного резонанса.
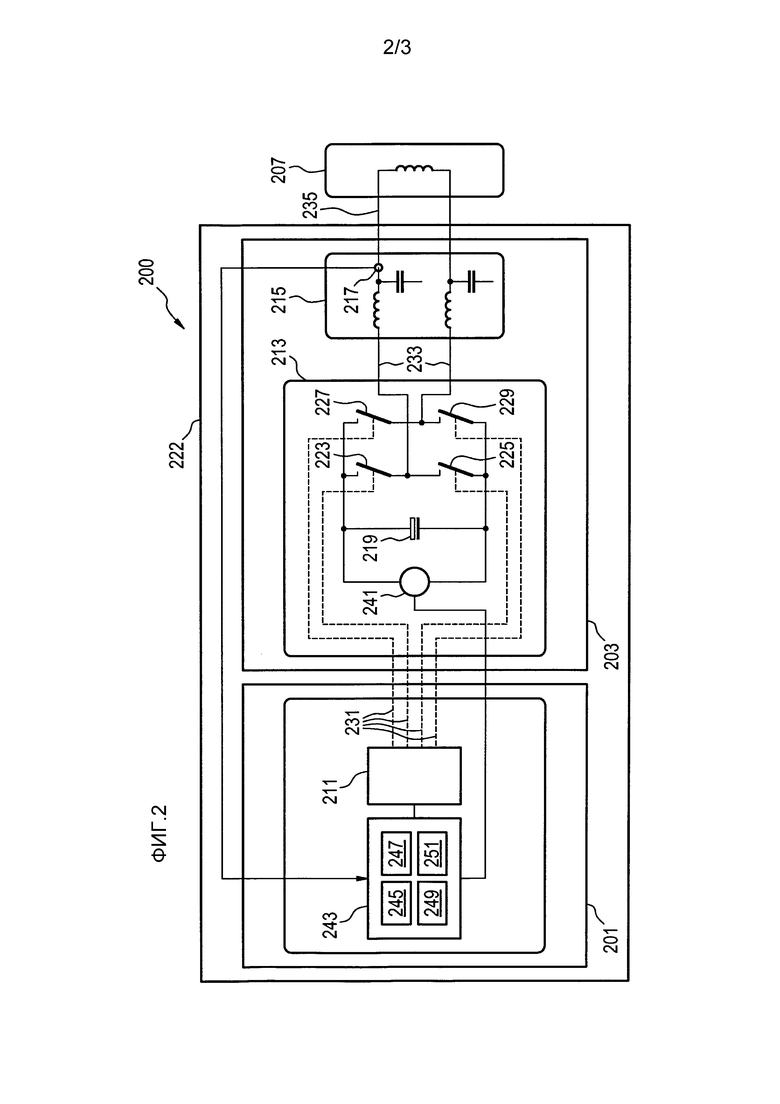
На фиг. 2 представлена упрощенная архитектура электронной системы 200, которая содержит градиентный усилитель 222 и градиентную катушку 207. Градиентный усилитель 222 содержит управляющий модуль 201, необязательно, и силовую цепь 203. Управляющий модуль 201 генерирует управляющие сигналы для силовой цепи 203 таким образом, что заданную точку, принимаемую в цифровом виде от источника, не показанного, такого как контроллер системы получения данных, точно воспроизводят на выходе силовой цепи 203. Силовая цепь 203 преобразует мощность, потребляемую от сети, в высокое напряжение и высокий ток, которые приводят в действие градиентную катушку 207.
Управляющий модуль 201 содержит контроллер 243 и модулятор 211. Контроллер 243 непрерывно передает на модулятор 211 необходимую заданную точку модуляции в отношении выходного напряжения на основе заданной точки, фактически и апостериори измеренного выходного тока и граничных условий, таких как напряжения, гашение выходного фильтра и т.д.
Модулятор 211 преобразует заданную точку модуляции от цифрового контроллера в подходящий сигнал широтно-импульсной модуляции (PWM) для всех индивидуальных блоков драйвера затвора силовой цепи 203. Эти PWM сигналы оптимизируют для диапазона высоких напряжений и высокой частоты пульсации при условии, что первое напряжение находится в заданных пределах. Контроллер 243 соединяют с источником электропитания 241. Контроллер 243 может управлять источником электропитания 241 для того, чтобы регулировать дополнительное напряжение V1 в соответствии с предварительно определяемой скоростью нарастания градиентного тока через градиентную катушку. Например, контроллер 243 может управлять источником электропитания 241 для того, чтобы снижать напряжение V1, если предварительно определяемая скорость нарастания ниже скорости нарастания, соответствующей V1. Контроллер 243 содержит первый блок 245 для того, чтобы повторно устанавливать скорость нарастания на второе значение в ответ на определение вторым блоком 247, что первую скорость нарастания нужно изменять, третий блок 249 для сравнения второй скорости нарастания с предварительно определяемым пороговым значением и четвертый блок 251 для управления источником электропитания 241 для того, чтобы регулировать напряжение до второго уровня, если второе значение ниже первого значения.
MRI сканирования, которые не извлекают пользу из максимальной амплитуды/скорости нарастания, ограничены максимальным уровнем амплитуды/скорости нарастания во время генерации формы волны на компьютере управления сканированием. Эти сканирования можно охарактеризовать предварительно, например, на основе способа сканирования, эхо-времени, интервалов между эхо, разрешения и т.д. Для этих сканирований контроллер 243 выбирает более низкое значение в качестве максимума системы. Также имеют место причины, связанные с системой, не использовать максимальную амплитуду и/или скорость нарастания. Это, например, может быть связано с диссипацией в градиентной катушке на высоких частотах. Использование высокой амплитуды/скорости нарастания также может увеличивать вероятность возникновения стимуляции периферических нервов (PNS). Контроллер 243 имеет блок (не показан) для того, чтобы предсказать PNS, и он может ограничивать максимальную амплитуду/скорость нарастания для того, чтобы оставаться в определенных PNS пределах. Пользователь также может модифицировать «набор параметров» на главном компьютере для того, чтобы ограничивать сканирование. Это может происходить опосредованно, например, с помощью системы ограничения до более низкого уровня шума, с использованием более низкой максимальной скорости нарастания (SofTone), или непосредственно, когда максимальную скорость нарастания задают в этом наборе параметров. Другими словами, существует множество возможностей для того, чтобы избегать максимальной скорости нарастания. Максимальную скорость нарастания используют не очень часто.
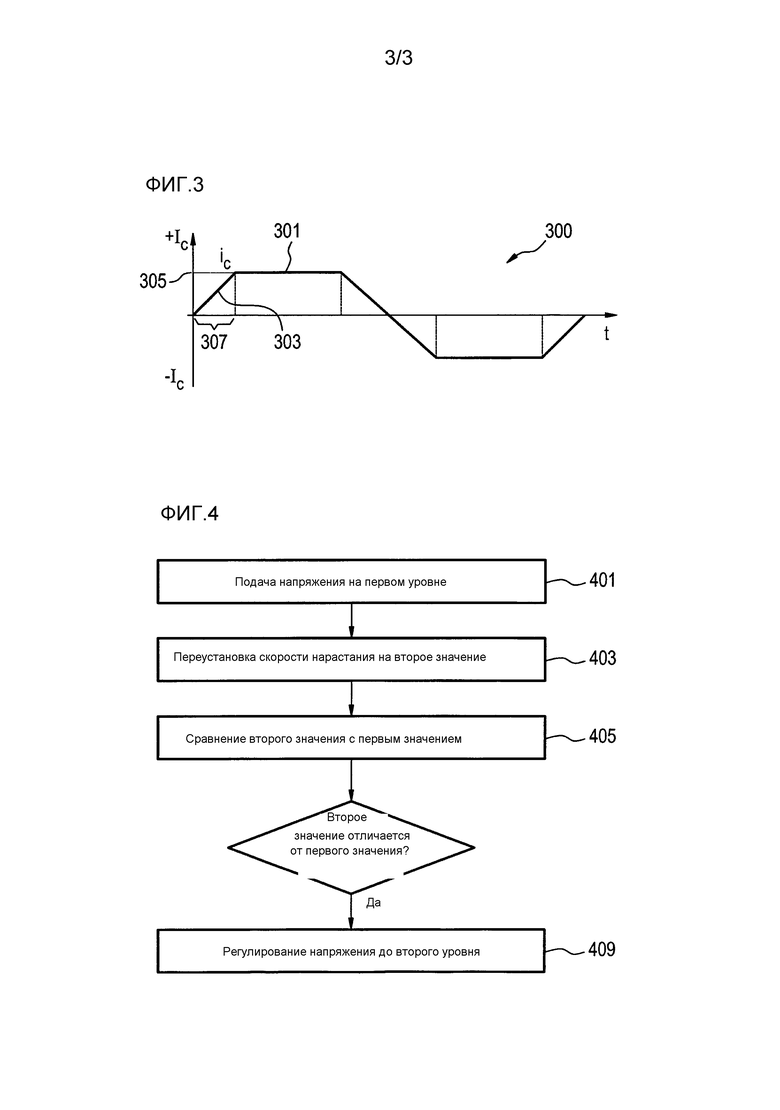
Силовая цепь 203 состоит из множества блоков, которые преобразуют мощность, потребляемую от сети, в подходящее высокое напряжение и высокий ток, которые приводят в действие градиентную катушку 207. Силовая цепь 203 содержит силовой блок 213. Силовой блок 213 содержит источник электропитания 241, который предоставляет мощность, потребляемую от сети. На фиг. 3 представлен типичный трапециевидный ток 300 через градиентную катушку 207. В плоской верхней части трапеции 301 градиентный усилитель должен компенсировать омические потери в градиентной катушке для того, чтобы сохранять ток в катушке. Эти потери требуют относительно низкого напряжения V0 от источника электропитания. Для того чтобы генерировать быстрые токовые градиенты через градиентную катушку 207 во время наклонной части 303 трапеции, требуется высокое напряжение на его выводах. То есть, индуктивность градиентной катушки 207 требует дополнительного напряжения V1 т.е., напряжения на первом уровне, пропорционального скорости изменения тока. Скорость нарастания можно определять как соотношение ic 205 и Δt 207.
Мощность, потребляемую от сети, дополнительно фильтруют, выпрямляют и стабилизируют до номинального напряжения. Силовая цепь 203 содержит силовой электронный блок 213, фильтр 215 и токовый датчик 217. Силовой электронный блок 213 содержит конденсатор 219, который соединяют параллельно с переключающим мостовым силовым каскадом. Мост может представлять собой, например, мост на полевых транзисторах со структурой металл-оксид-полупроводник (MOSFET) или биполярных транзисторах с изолированным затвором (IGBT). Переключатели 223 и 225 образуют первый полумост, 227 и 229 второй полумост. Полумосты отдельно приводят в действие посредством широтно-импульсных модуляторов управляющего модуля 201.
Управляющий модуль 201 соединяют с четырьмя переключателями 223, 225, 227 и 229 через четыре соответствующие линии 231. Силовой блок 213 генерирует точное и управляемое выходное напряжение 233 каскада из напряжения сети посредством широтно-импульсной модуляции. Остаточные пульсации отфильтровывают с помощью фильтра 215, и фильтрованное напряжение 235 находится на градиентной катушке 207 в качестве выходного напряжения. Фильтр может представлять собой, например, фильтр низких частот.
Датчик 217 может создавать сигнал обратной связи для цифрового контроллера, отражающий градиентное магнитное поле, образуемое для градиентной катушки.
Для системы магнитно-резонансной визуализации типично имеет место один градиентный источник питания, такой как описано на фиг. 2, для каждого из трех различных ортогональных направлений.
На фиг. 4 представлена блок-схема способа подачи тока на градиентную катушку системы магнитно-резонансной визуализации с помощью градиентного усилителя.
На этапе 401 источник электропитания подает напряжение на первом уровне на вывод градиентного усилителя для того, чтобы генерировать градиентный ток в градиентной катушке для того, чтобы получать градиентное магнитное поле при определенной скорости нарастания. Скорость нарастания устанавливают на первое значение.
На этапе 403 контроллер 243 повторно устанавливает скорость нарастания на второе значение, в ответ на определение того, что первую скорость нарастания нужно менять. Переустановка происходит до или во время получения данных с помощью системы магнитно-резонансной визуализации. Изменением значения скорости нарастания может двигать диссипация, возникающая в градиентной катушке и/или силовых блоках. Определение, что первую скорость нарастания нужно изменять, включает определение электрической мощности, рассеиваемой градиентной катушкой, в настоящее время создающей градиентное магнитное поле; и выбор второй скорости нарастания из одной или нескольких предварительно определяемых скоростей нарастания, если рассеиваемая электрическая мощность превышает предварительно определяемое максимально допустимое значение диссипации.
В другом примере определение того, что первую скорость нарастания нужно изменять, включает получение запроса на снижение первой скорости нарастания от пользователя системы магнитно-резонансной визуализации, запрос отражает вторую скорость нарастания.
На этапе 405 второе значение сравнивают с первым значением. Значение представляет собой максимальную допустимую скорость нарастания. Напряжение на втором уровне V2 можно определять по напряжению на первом уровне V1 с использованием уравнения:
V2=S×V1, где S=max (SR/SRmax, 0,5)
где SR представляет собой второе значение скорости нарастания и SRmax представляет собой максимальную допустимую скорость нарастания.
На этапе 409 напряжение регулируют до второго уровня, если второе значение отличается от первого значения.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
100 система MRI
101 пациента
103 магнитный сборочный узел
105 магнитная катушка
107 градиентная катушка
109 градиентный усилитель
111 управляющий модуль
113 контроллер
115 источник электропитания
152 компьютерная система
154 аппаратный интерфейс
156 процессор
158 пользовательский интерфейс
160 компьютерный накопитель
162 компьютерная память
168 параметры сканирования
170 импульсная последовательность
172 данные магнитного резонанса
174 модуль
200 электронная система
222 градиентный усилитель
201 управляющий модуль
203 силовая цепь
207 градиентная катушка
211 модулятор
213 силовой блок
215 фильтр
217 датчик
219 конденсатор
223-229 переключатели
231 линия
233 выходное напряжение
235 фильтрованное напряжение
241 источник электропитания
243 контроллер
Изобретение относится к магнитно-резонансной визуализации, в частности к источникам питания для катушек градиентного магнитного поля в системах магнитно-резонансной визуализации. Сущность изобретения заключается в том, что подают с помощью источника электропитания напряжения на первом уровне на вывод градиентного усилителя для того, чтобы генерировать градиентный ток в градиентной катушке для того, чтобы создавать градиентное магнитное поле при определенной скорости нарастания, причем скорость нарастания устанавливают на первое значение, переустановку скорости нарастания на второе значение, сравнивают второе значение с первым значением и регулируют напряжение до второго уровня, если второе значение отличается от первого значения. Технический результат – повышение максимально допустимого RMS тока. 4 н. и 9 з.п. ф-лы, 4 ил.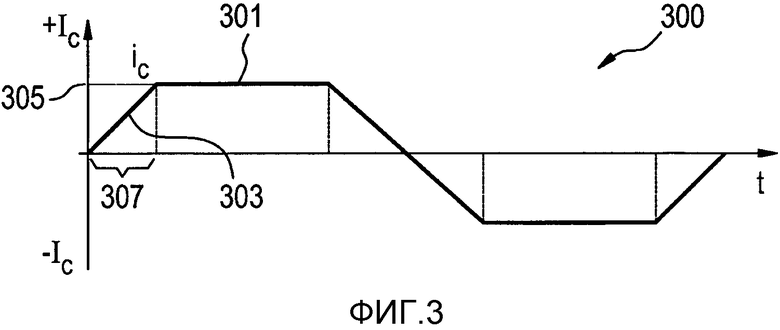
1. Система магнитно-резонансной визуализации, которая содержит:
градиентную катушку,
градиентный усилитель для подачи тока на градиентную катушку, причем вывод градиентного усилителя соединяют с градиентной катушкой, при этом градиентный усилитель содержит:
управляющий модуль с цифровым контроллером и модулятором для того, чтобы предоставлять сигналы широтно-импульсной модуляции (PWM);
силовую цепь с силовым электронным блоком и фильтром для того, чтобы подавать фильтрованное напряжение на градиентную катушку, причем
в силовом электронном блоке предусмотрен источник электропитания и конденсатор, расположенные параллельно с переключающим мостовым силовым каскадом, причем
источник электропитания выполнен с возможностью подавать напряжение на первом уровне на переключающий мостовой силовой каскад для того, чтобы подавать фильтрованное выходное напряжение на градиентную катушку для того, чтобы генерировать градиентный ток в градиентной катушке, чтобы создавать градиентное магнитное поле при определенной скорости нарастания, причем скорость нарастания устанавливают на первое значение; и на контроллер, соединенный с источником электропитания, причем цифровой контроллер выполнен с возможностью:
повторно устанавливать скорость нарастания на второе значение,
сравнивать второе значение с первым значением, и
управлять источником электропитания для того, чтобы регулировать напряжение на переключающем мостовом силовом каскаде до второго уровня, если второе значение отличается от первого значения.
2. Система магнитно-резонансной визуализации по п. 1, в которой переустановка происходит перед получением данных с помощью системы магнитно-резонансной визуализации.
3. Система магнитно-резонансной визуализации по п. 1, в которой переустановка происходит во время получения данных с помощью системы магнитно-резонансной визуализации.
4. Система магнитно-резонансной визуализации по п. 1, в которой переустановка содержит:
определение электрической мощности, рассеиваемой градиентной катушкой, в текущее время создающей градиентное магнитное поле;
выбор второго значения скорости нарастания из одного или нескольких заданных значений скорости нарастания, если рассеиваемая электрическая мощность превышает заданное максимально допустимое значение диссипации.
5. Система магнитно-резонансной визуализации по п. 1, в которой переустановка включает прием запроса на снижение первого значения скорости нарастания от пользователя системы магнитно-резонансной визуализации, причем запрос указывает на второе значение.
6. Система магнитно-резонансной визуализации по п. 5, в которой первое значение представляет собой максимальное значение скорости нарастания, допустимое для системы MRI.
7. Система магнитно-резонансной визуализации по любому одному из предыдущих пунктов, в которой напряжение на втором уровне V2 определяют по напряжению на первом уровне V1 с использованием уравнения:
V2=S×V1, где S=max (SR/SRmax, 0,5),
причем SR представляет собой второе значение скорости нарастания и SRmax представляет собой максимальное значение скорости нарастания, допустимое для системы MRI.
8. Градиентный усилитель для подачи тока на градиентную катушку системы магнитно-резонансной визуализации, причем градиентный усилитель имеет выход, который выполнен с возможностью соединения с градиентной катушкой, при этом градиентный усилитель содержит:
управляющий модуль с цифровым контроллером и модулятором для того, чтобы предоставлять сигналы широтно-импульсной модуляции (PWM);
силовую цепь с силовым электронным блоком и фильтром для того, чтобы подавать фильтрованное напряжение на градиентную катушку, причем
в силовом электронном блоке предусмотрен источник электропитания и конденсатор, расположенные параллельно с переключающим мостовым силовым каскадом, причем
источник электропитания выполнен с возможностью подавать напряжение на первом уровне на переключающий мостовой силовой каскад для того, чтобы подавать фильтрованное выходное напряжение на градиентную катушку для того, чтобы генерировать градиентный ток в градиентной катушке, чтобы создавать градиентное магнитное поле при определенной скорости нарастания, причем скорость нарастания устанавливают на первое значение;
контроллер, соединенный с источником электропитания, который выполнен с возможностью
переустанавливать скорость нарастания на второе значение,
сравнивать второе значение с первым значением, и
управлять источником электропитания для того, чтобы регулировать напряжение на переключающем мостовом силовом каскаде до второго уровня, если второе значение отличается от первого значения.
9. Градиентный усилитель по п. 8, в котором второе значение ниже первого значения и напряжение на втором уровне меньше напряжения на первом уровне.
10. Градиентный усилитель по п. 8, в котором первое значение представляет собой максимальную скорость нарастания, допустимую для системы MRI.
11. Градиентный усилитель по любому одному из предыдущих пп. 8-10, в котором напряжение на втором уровне V2 определяют по напряжению на первом уровне V1 с использованием уравнения:
V2=S×V1, где S=max (SR/SRmax, 0,5),
причем SR представляет собой второе значение скорости нарастания и SRmax представляет собой максимальную скорость нарастания, допустимую для системы MRI.
12. Способ подачи тока на градиентную катушку системы магнитно-резонансной визуализации с помощью градиентного усилителя, содержащего переключающий мостовой силовой каскад, причем способ содержит:
подачу, с помощью источника электропитания, напряжения на переключающий мостовой силовой каскад на первом уровне на вывод градиентного усилителя для того, чтобы генерировать градиентный ток в градиентной катушке, чтобы создавать градиентное магнитное поле при определенной скорости нарастания, причем скорость нарастания устанавливают на первое значение,
переустановку скорости нарастания на второе значение,
сравнение второго значения с первым значением, и
регулирование напряжения на переключающем мостовом силовом каскаде до второго уровня, если второе значение отличается от первого значения.
13. Машиночитаемый носитель, который содержит исполняемые компьютером инструкции, причем исполнение инструкций предписывает компьютеру выполнять этапы способа управляющего модуля по пп. 1-7.
| US 6198289 B1, 06.03.2001 | |||
| US 6201395 B1, 13.03.2001 | |||
| US 6323649 B1, 27.11.2001 | |||
| RU 2010117640 A, 10.11.2011. |

