Изобретение относится к авиационной технике, в частности к конструкции и способу управления одновинтовым вертолетом с использованием рулевого винта (РВ) для создания дополнительной пропульсивной силы.
Известен опытный вертолет США фирмы «Локхид» АН-56 «Шайен» (Ружицкий Е.И. «Мировые рекорды вертолетов», Казань, издательство «Вертолет», 2005, стр. 147), который имеет одновременно традиционный РВ и дополнительный толкающий винт, предназначенный для получения дополнительной пропульсивной силы.
К недостаткам такой схемы можно отнести снижение весовой отдачи, по сравнению с одновинтовым вертолетом, ухудшения центровки (более задняя) и сложность управления (динамики) вертолетом, что обусловило прекращение программы разработки вертолета.
Известен опытный вертолет США Сикорский S-61, схема которого впервые была применена фирмой Белл (Piper R / BDM swiveling tail rotor helicopter // Proceedings of the 20 Annual Forum of American Helicopter Society, 1964, p/56-68).
Вертолет имеет поворотный в горизонтальной плоскости вертолета рулевой винт. Из положения, характерного для традиционного одновинтового вертолета, рулевой винт разворачивается в положение толкающего винта для создания дополнительной пропульсивной силы.
К недостаткам такой схемы относятся: резкое снижение безопасности полетов при возникновении неполадок в механизме поворота рулевого винта, значительное усложнение динамики полетов на переходных режимах, а также снижение коэффициента весовой отдачи и усложнение конструкции хвостового редуктора.
Известен летательный аппарат, оснащенный поворотным рулевым винтом, и способ его пилотирования (заявка на изобретение US 2012/0012693, 2012 г., способ пилотирования по которой принят ближайшим аналогом заявляемого способа). В соответствии с этим изобретением рулевой винт вертолета выполнен с возможностью поворота для перехода от режима парирования реактивного момента несущего винта на режим создания пропульсивной тяги, причем лопасти рулевого винта имеют изменяемые углы установки. Кроме того, устройство включает средство изменения угла установки оси рулевого винта и средство управления тягой.
Способ пилотирования включает изменение общего шага лопастей на режимах висения и малых скоростей и изменение угла поворота оси рулевого винта на режимах создания дополнительной пропульсивной составляющей тяги. Причем переход с одного режима пилотирования на другой осуществляют с учетом заданных значений углов перехода и заданной поступательной скорости полета с помощью логического блока и переключающего устройства с одновременным изменением шага лопастей рулевого винта.
Недостатком конструкции является достаточно сложный механизм для поворота редуктора рулевого винта в положение для работы вертолета в скоростном режиме и сложная система управления.
Наиболее близким к заявляемому устройству является одновинтовой вертолет (заявка на изобретение JPS 6460498, 1989 г.), в котором рулевой винт оснащен механизмом циклического управления углом установки лопастей, что позволяет увеличивать пропульсивную составляющую тяги, действующую по направлению полета.
Недостатком конструкции является то, что поворот вектора тяги только с помощью циклического управления может лишь незначительно увеличить величину пропульсивной составляющей тяги, то есть делает малоэффективным режим с созданием дополнительной пропульсивной силы.
Целью заявляемого технического решения одновинтового вертолета с использованием повернутого рулевого винта и циклического управления рулевым винтом является создание конструкции, которая позволит при переходе на скоростной режим полета значительно увеличить пропульсивную составляющую тяги без механизма поворота рулевого винта.
Целью заявляемого способа управления является упрощение перехода с режима висения и малых скоростей на скоростной режим без изменения угла установки вала рулевого винта и его редуктора.
Поставленные цели достигаются благодаря тому, что на одновинтовой вертолет, содержащий фюзеляж, несущий винт, силовую установку, элементы трансмиссии, систему управления и рулевой винт с управлением общим и циклическим шагом, в соответствии с заявляемым изобретением вал рулевого винта установлен под постоянным углом в горизонтальной плоскости вертолета в диапазоне 50-70 градусов относительно продольной оси вертолета для получения пропульсивной составляющей вектора тяги рулевого винта, а механизм управления циклическим шагом рулевого винта выполнен в виде автомата перекоса с управлением по одному каналу с возможностью отклонения его кольца на угол, обеспечивающий дополнительное увеличение или уменьшение пропульсивной составляющей вектора тяги рулевого винта.
Заявляемый способ управления одновинтовым вертолетом с использованием рулевого винта для создания дополнительной пропульсивной силы в соответствии с заявляемым изобретением характеризуется тем, что рулевой винт устанавливают под постоянным заданным углом в горизонтальной плоскости вертолета, значение которого выбирают в диапазоне 50-70 градусов относительно продольной оси вертолета, и осуществляют управление циклическим шагом рулевого винта с помощью автомата перекоса по одному каналу путем отклонения его кольца в обоих направлениях относительно оси вала рулевого винта, соответствующего дополнительному повороту вектора тяги на углы не более 10 градусов, а именно: на режиме висения и малых скоростей полета - в направлении, соответствующем минимальной пропульсивной составляющей вектора тяги, а на скоростных режимах - в направлении, соответствующем максимальной пропульсивной составляющей вектора тяги в направлении полета, причем при повороте кольца в положение, соответствующее увеличенной пропульсивной составляющей вектора тяги, изменяют общий шаг рулевого винта для парирования изменения реактивного момента несущего винта с учетом скорости полета.
При этом отклонение кольца автомата перекоса при переходе от режима висения и малых скоростей к скоростным режимам полета осуществляют в зависимости от скорости полета с помощью привода с управляющим вычислителем, воспринимающим сигнал от датчика приборной воздушной скорости и вырабатывающим управляющий сигнал на привод для соответствующего отклонения кольца автомата перекоса на угол φАП=f(V), где
φАП - угол отклонения кольца автомата перекоса;
V - приборная воздушная скорость.
Кроме того, для повышения безопасности полета привод, служащий для отклонения кольца автомата перекоса, и управляющий им вычислитель выполнены резервированными и снабжены устройством, обеспечивающим приведение кольца автомата перекоса в положение, соответствующее режиму висения, при отказе привода или вычислителя.
Установка вала рулевого винта под постоянным углом относительно продольной оси вертолета в предлагаемом диапазоне позволяет получить соответствующий поворот вектора тяги и, таким образом, получить составляющую вектора тяги в направлении полета. А использование управления циклическим шагом лопастей рулевого винта позволяет при отклонении кольца автомата перекоса (АП) в соответствующую сторону получить дополнительное увеличение пропульсивной составляющей вектора тяги. При отклонении же кольца автомата перекоса в противоположном направлении увеличивается составляющая вектора тяги для компенсации реактивного момента несущего винта.
Диапазоны постоянного угла установки вала рулевого винта и величины углов отклонения кольца автомата перекоса выбираются расчетным путем с учетом допустимого махового движения лопастей.
Заявляемое техническое решение одновинтового вертолета и способ его работы поясняется фигурами, где изображены:
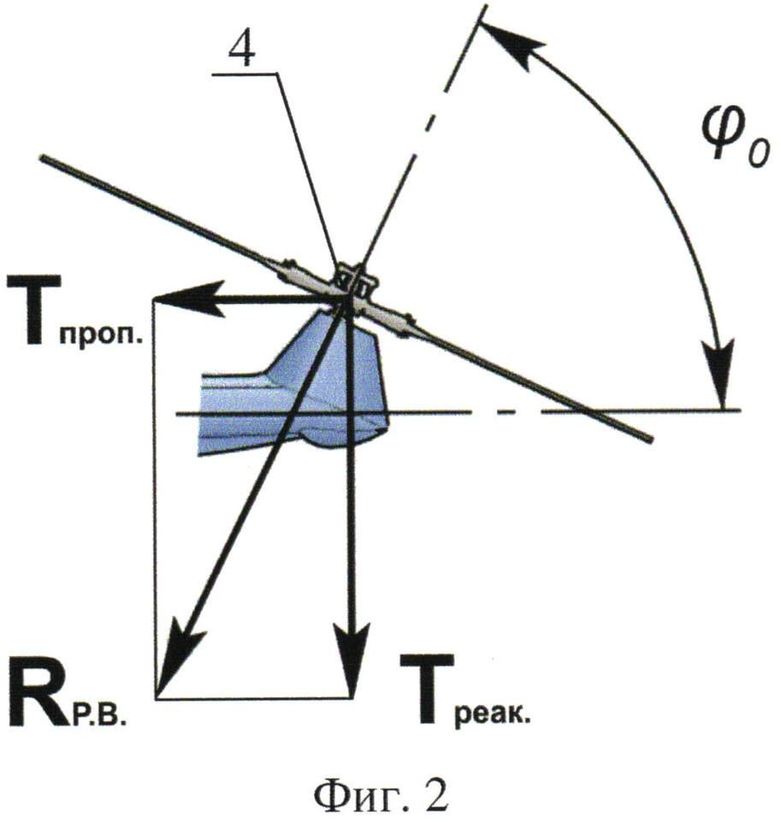
на фиг. 1 - одновинтовой вертолет с рулевым винтом, установленным под углом к продольной оси вертолета, вид сверху;
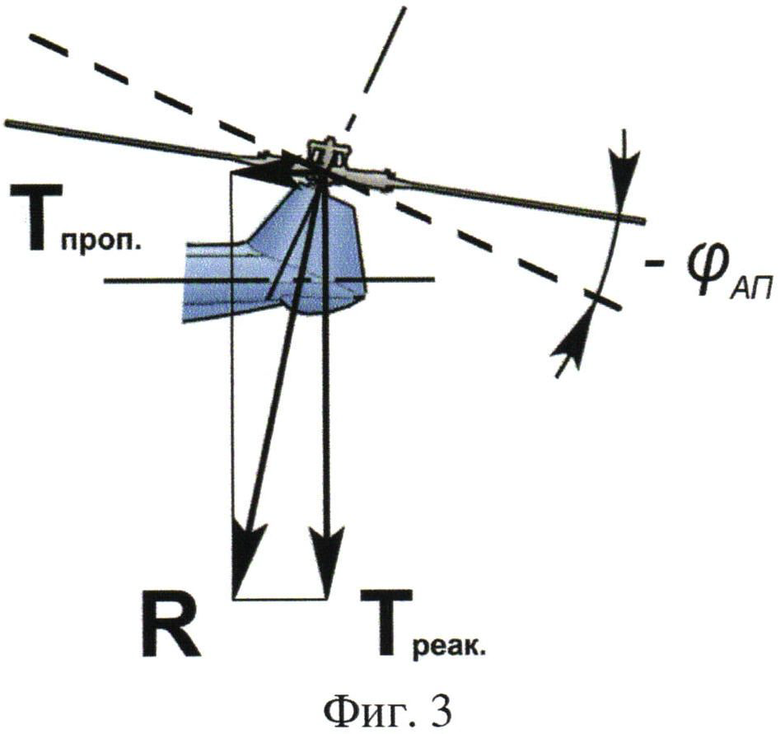
на фиг. 2 - схематическое изображение узла установки рулевого винта с изображением плоскости рулевого винта и вектора тяги;
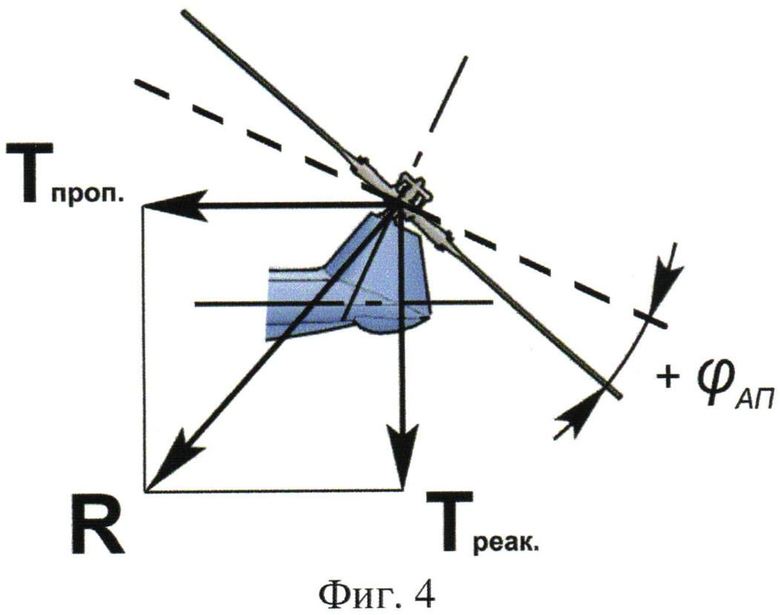
на фиг. 3 - то же на режимах висения и малых скоростей;
на фиг. 4. - то же на режимах горизонтального полета с крейсерской и максимальной скоростями.
На фигуре 1 изображен заявляемый одновинтовой вертолет, содержащий фюзеляж 1, лопасти 2 несущего винта, рулевой винт 3, а также силовую установку, элементы трансмиссии и систему управления (не показаны). Рулевой винт 3 снабжен автоматом перекоса 4 с управлением по одному каналу отклонения его кольца относительно вала рулевого винта, обеспечивающего дополнительное увеличение или уменьшение пропульсивной составляющей вектора тяги рулевого винта в соответствии с направлением отклонения кольца от нейтрального положения.
На фигуре 2 показано положение оси вала рулевого винта и положение плоскости лопастей рулевого винта при расположении его вала под постоянным углом φ0 в горизонтальной плоскости вертолета, выбранным в диапазоне 50-70 градусов относительно продольной оси вертолета, при нейтральном положении циклического управления рулевого вина (с нулевым углом поворота кольца автомата перекоса), где обозначены:
R - равнодействующая тяги рулевого винта;
Треакт - составляющая тяги, момент которой уравновешивает реактивный момент несущего винта;
Тпроп - пропульсивная составляющая тяги рулевого винта.
Таким образом видно, что за счет установки вала рулевого винта под постоянным углом (в заявленном диапазоне) относительно продольной оси вертолета равнодействующая тяги рулевого винта R имеет некоторую пропульсивную составляющую Тпроп.
На фигурах 3 и 4 упомянутое положение плоскости рулевого винта при нейтральном положении управления циклическим шагом рулевого винта показано пунктиром.
При этом (фиг. 3) при управлении циклическим шагом рулевого винта путем максимального отклонения кольца автомата перекоса на угол (-φАП) на режимах висения и малых скоростей пропульсивная составляющая Тпроп тяги рулевого винта R минимальна, а плоскость рулевого винта находится в положении, максимально приближенном к соответствующему положению плоскости рулевого винта традиционного одновинтового вертолета.
Напротив, при управлении циклическим шагом рулевого винта путем максимального отклонения кольца автомата перекоса на угол (+φАП) на режимах горизонтального полета с крейсерской и максимальной скоростями (фиг. 4) пропульсивная составляющая Тпроп тяги R рулевого винта наибольшая.
Способ управления одновинтовым вертолетом с рулевым винтом, выполненным в соответствии с п. 1 формулы изобретения, осуществляется следующим образом.
Управление циклическим шагом рулевого винта осуществляют посредством отклонения кольца автомата перекоса 4 (фиг. 2) из нейтрального положения в одном или другом направлении относительно оси вала рулевого винта 3(фиг. 1), чем обеспечивают соответствующий дополнительный поворот вектора тяги: на режиме висения и малых скоростей полета - в направлении, соответствующем минимальной пропульсивной составляющей вектора тяги, а на скоростных режимах - в направлении, соответствующем максимальной пропульсивной составляющей вектора тяги рулевого винта в направлении полета (фиг. 3, 4).
Поворот кольца автомата перекоса при переходе от режима висения и малых скоростей к скоростным режимам полета осуществляется в зависимости от скорости полета φАП=f(V).
Важно отметить, что указанный закон может быть введен в виде постоянной программы вычислителя, что существенно упрощает систему управления рулевым винтом.
Поворот кольца автомата перекоса осуществляется с помощью привода, управляемого вычислителем. Этот привод и вычислитель выполнены резервированными для повышения безопасности полета в случае отказа привода или вычислителя с устройством, обеспечивающим приведение кольца автомата перекоса в положение, соответствующее режиму висения, в случае отказа привода или вычислителя.
Далее, управление общим шагом рулевого винта, независимо от угла отклонения кольца автомата перекоса, осуществляется с помощью традиционного канала направления. Разгон вертолета осуществляется традиционным способом путем использования продольного управления вертолета. При повороте (отклонении) кольца автомата перекоса рулевого винта в положение, соответствующее увеличенной пропульсивной силе, не требуется никаких дополнительных управляющих воздействий кроме единственного - изменения общего шага рулевого винта для парирования реактивного момента несущего винта. Величина составляющей тяги рулевого винта, необходимой для парирования реактивного момента несущего винта, зависит только от скорости полета. Таким образом, с ростом скорости общий шаг рулевого будет автоматически (под воздействием канала направления автопилота) устанавливаться в нужное положение, давая при этом зависящую от скорости полета пропульсивную составляющую тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| БЕСПИЛОТНЫЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2601470C1 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2555086C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ДВИЖИТЕЛЬНО-РУЛЕВОЙ СИСТЕМОЙ | 2016 |
|
RU2629478C2 |
| СКОРОСТНОЙ СВЕРХМАНЕВРЕННЫЙ ВИНТОКРЫЛ | 2012 |
|
RU2480379C1 |
| СКОРОСТНОЙ ВИНТОКРЫЛ-АМФИБИЯ | 2016 |
|
RU2627965C1 |
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2796703C2 |
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
Вертолет содержит фюзеляж, несущий винт, рулевой винт с управлением общим и циклическим шагом, силовую установку, элементы трансмиссии и систему управления. Вал рулевого винта установлен под постоянным углом в горизонтальной плоскости вертолета в диапазоне 50-70 градусов относительно продольной оси вертолета, а механизм управления циклическим шагом рулевого винта выполнен в виде автомата перекоса с управлением по одному каналу с отклонением его кольца на угол, обеспечивающий дополнительное увеличение или уменьшение пропульсивной составляющей вектора тяги рулевого винта. Способ управления одновинтовым вертолетом с использованием рулевого винта для создания дополнительной пропульсивной силы включает установку винта под постоянным заданным углом в горизонтальной плоскости вертолета, значение которого выбирают в диапазоне 50-70 градусов относительно продольной оси вертолета. Управление циклическим шагом рулевого винта осуществляют с помощью автомата перекоса по одному каналу путем отклонения его кольца в обоих направлениях относительно оси вала рулевого винта, соответствующего дополнительному повороту вектора тяги на углы не более 10 градусов. Достигается упрощение перехода с режима висения или малых скоростей на скоростной режим полета. 2 н. и 2 з.п. ф-лы, 4 ил.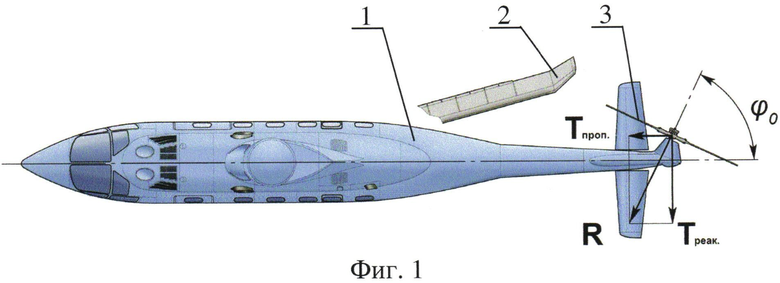
1. Одновинтовой вертолет, содержащий фюзеляж, несущий винт, силовую установку, элементы трансмиссии, систему управления и рулевой винт с управлением общим и циклическим шагом, отличающийся тем, что вал рулевого винта установлен под постоянным углом в горизонтальной плоскости вертолета в диапазоне 50-70 градусов относительно продольной оси вертолета для получения пропульсивной составляющей вектора тяги рулевого винта, а механизм управления циклическим шагом рулевого винта выполнен в виде автомата перекоса с управлением по одному каналу с возможностью отклонения его кольца на угол, обеспечивающий дополнительное увеличение или уменьшение пропульсивной составляющей вектора тяги рулевого винта.
2. Способ управления одновинтовым вертолетом с использованием рулевого винта для создания дополнительной пропульсивной силы, отличающийся тем, что рулевой винт устанавливают под постоянным заданным углом в горизонтальной плоскости вертолета, значение которого выбирают в диапазоне 50-70 градусов относительно продольной оси вертолета, и осуществляют управление циклическим шагом рулевого винта с помощью автомата перекоса по одному каналу путем отклонения его кольца в обоих направлениях относительно оси вала рулевого винта, соответствующего дополнительному повороту вектора тяги на углы не более 10 градусов, а именно: на режиме висения и малых скоростей полета - в направлении, соответствующем минимальной пропульсивной составляющей вектора тяги, а на скоростных режимах - в направлении, соответствующем максимальной пропульсивной составляющей вектора тяги в направлении полета, причем при повороте кольца в положение, соответствующее увеличенной пропульсивной составляющей вектора тяги, изменяют общий шаг рулевого винта для парирования изменения реактивного момента несущего винта с учетом скорости полета.
3. Способ управления по п. 2, отличающийся тем, что отклонение кольца автомата перекоса при переходе от режима висения и малых скоростей к скоростным режимам полета осуществляют в зависимости от скорости полета с помощью привода с управляющим вычислителем, воспринимающим сигнал от датчика приборной воздушной скорости и вырабатывающим управляющий сигнал на привод для соответствующего отклонения кольца автомата перекоса на угол φАП=f (V), где
φАП - угол отклонения кольца автомата перекоса;
V - приборная воздушная скорость.
4. Способ управления по п. 3, отличающийся тем, что для повышения безопасности полета привод, служащий для отклонения кольца автомата перекоса, и управляющий им вычислитель выполнены резервированными и снабжены устройством, обеспечивающим приведение кольца автомата перекоса в положение, соответствующее режиму висения, при отказе привода или вычислителя.
| US 2012012693 A1, 19.01.2012 | |||
| WO 9705017 A1, 13.02.1997 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С АЭРОДИНАМИЧЕСКИМ ПОДЪЕМНО-ТЯНУЩИМ ДВИЖИТЕЛЕМ | 2004 |
|
RU2260546C1 |
| US 2013134256 A1, 30.05.2013 | |||

