Изобретение относится к области авиационной техники и может быть применено в летательных аппаратах с вертикальным взлетом и посадкой, использующих аэродинамические подъемно-тянущие движители.
Известны вертолеты с одним несущим винтом и вспомогательным рулевым винтом, способным вызвать поперечную тягу (например патент РФ №2086476, В 64 С 27/04, 27/82, 1997).
В известных вертолетах используются несущие винты, имеющие недостаточную эффективность создания подъемной силы, вследствие чего для получения приемлемых величин подъемной силы к ним необходимо подводить значительную мощность.
В предложенном изобретении использован новый аэродинамический подъемно-тянущий движитель, которым обеспечивается высокая эффективность создания подъемной силы, так и горизонтальной тяги (патент РФ №2227107, В 64 С 39/08, 2004; международная публикация WO 03/086857 от 23.10.2003, МПК В 64 С 11/46, 27/08; международная публикация WO 03/086858 от 23.10.2003, МПК В 64 С 11/46, 27/08).
В уровне техники не обнаружены аналоги - средства того же назначения.
В основу изобретения поставлена задача получения впервые летательного аппарата вертикального взлета и посадки с аэродинамическим подъемно-тянущим движителем, выполненным с по крайней мере двумя аэродинамическими поверхностями, имеющими возможность движения по окружности, синхронного вращения в противоположную сторону относительно оси вращения параллельной оси движения и колебания каждой аэродинамической поверхности синхронно с вращением относительно двух взаимно перпендикулярных осей, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения аэродинамической поверхности, причем одна из плоскостей проходит через ось движения по окружности и ось вращения.
Задача создания летательного аппарата вертикального взлета и посадки с аэродинамическим подъемно-тянущим движителем решается тем, что в летательном аппарате вертикального взлета и посадки с аэродинамическим подъемно-тянущим движителем, выполненным с по крайней мере двумя аэродинамическими поверхностями, имеющими возможность движения по окружности, синхронного вращения в противоположную сторону относительно оси вращения, параллельной оси движения, и колебания каждой аэродинамической поверхности синхронно с вращением относительно двух взаимно перпендикулярных осей, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения аэродинамической поверхности, причем одна из плоскостей проходит через ось движения по окружности и ось вращения, содержащем корпус с хвостом, установленным на корпусе сверху аэродинамическим подъемно-тянущим движителем, установленным сбоку на конце хвоста хвостовым винтом, вал вращения которого расположен горизонтально и поперечно продольной плоскости симметрии корпуса, с возможностью поворота в горизонтальной плоскости относительно вертикальной оси, проходящей через вал вращения, в сторону начала корпуса на угол менее 90°, и возможностью вертикального перемещения, ось движения движителя смещена относительно продольной плоскости симметрии корпуса в сторону, противоположную хвостовому винту, на величину не более 0,1 h и установлена с наклоном в сторону смещения на угол менее 10° относительно вертикали, где h - расстояние от горизонтальной плоскости, проходящей через центр масс летательного аппарата, до точки на оси движения, равноудаленной от центров симметрии аэродинамических поверхностей движителя.
Выполнение летательного аппарата вертикального взлета и посадки с аэродинамическим подъемно-тянущим движителем, в котором содержится корпус с хвостом, установленным на корпусе сверху аэродинамическим подъемно-тянущим движителем, установленным сбоку на конце хвоста хвостовым винтом, вал вращения которого расположен горизонтально и поперечно продольной плоскости симметрии корпуса, ось движения движителя смещена относительно продольной плоскости симметрии корпуса в сторону, противоположную хвостовому винту, на величину не более 0,1 h и установлена с наклоном в сторону смещения на угол менее 10° относительно вертикали, где h - расстояние от горизонтальной плоскости, проходящей через центр масс летательного аппарата, до точки на оси движения, равноудаленной от центров симметрии аэродинамических поверхностей движителя, позволяет компенсировать реактивный момент, образуемый от вращения движителя и поперечную аэродинамическую силу хвостового винта боковой составляющей силой, возникающей от установки с наклоном на угол менее 10° движителя. Вертикальное перемещение хвостового винта и поворот в горизонтальной плоскости относительно вертикальной оси на угол менее 90° в сторону начала корпуса позволяет компенсировать момент на пикирование относительно оси Z. Смещение оси вращения движителя от продольной плоскости симметрии корпуса на величину не более 0,1 h позволяет создать взаимно уравновешивающие моменты относительно оси Х от боковой аэродинамической силы и подъемной аэродинамической силы, создаваемых движителем.
Летательный аппарат может быть выполнен так, чтобы хвостовой винт выполнялся двухступенчатым со ступенями противоположного вращения, которые обеспечивают взаимное уравновешивание вращающих моментов и уменьшают реактивный момент от действия хвостового винта.
На фиг.1 изображен общий вид летательного аппарата вертикального взлета и посадки с аэродинамическим подъемно-тянущим движителем; на фиг.2 - схема аэродинамических сил, действующих на летательный аппарат на режиме вертикального полета; на фиг.3 - схема аэродинамических сил, действующих на летательный аппарат на режиме горизонтального полета.
Летательный аппарат вертикального взлета и посадки с аэродинамическим подъемно-тянущим движителем 1, выполненным с по крайней мере двумя аэродинамическими поверхностями 2, имеющими возможность движения по окружности, например в направлении, указанном по стрелке 3, синхронного вращения в противоположную сторону по стрелке 4 относительно оси вращения 5, параллельной оси движения 6, и колебания каждой аэродинамической поверхности 2 синхронно с вращением относительно двух взаимно перпендикулярных осей 7 и 8, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения 5 аэродинамической поверхности 2, причем одна из плоскостей проходит через ось движения 6 по окружности и ось вращения 5 аэродинамической поверхности 2.
Летательный аппарат вертикального взлета и посадки с аэродинамическим подъемно-тянущим движителем 1 содержит корпус 10 с хвостом 11, установленный на корпусе 10 сверху аэродинамический подъемно-тянущий движитель 1, установленный сбоку на конце хвоста 11 хвостовой винт 12, вал вращения 13 которого расположен горизонтально и поперечно продольной плоскости симметрии корпуса 10, с возможностью поворота в горизонтальной плоскости относительно вертикальной оси 14, проходящей через вал вращения 13, в сторону начала корпуса 10 на угол менее 90°, и возможностью вертикального перемещения.
Поворот в горизонтальной плоскости и вертикальное перемещение хвостового винта 12 могут быть осуществлены с помощью механизма, выполненного из соединенной с хвостовым винтом 12 вертикальной раздвижной оси, состоящей из двух валов, один из которых может перемещаться внутри другого с помощью привода, обеспечивая установку хвостового винта 12 в нужное вертикальное положение и поворота в горизонтальной плоскости от конической передачи, образованной коническими шестернями, размещенными на валу, установленном внутри второго вала и на валу вращения 13.
Ось движения аэродинамического подъемно-тянущего движителя 1 смещена относительно продольной плоскости симметрии корпуса 10 в сторону, противоположную хвостовому винту 12, на величину не более 0,1 h и установлена с наклоном в сторону смещения на угол менее 10° относительно вертикали, где h - расстояние от горизонтальной плоскости, проходящей через центр масс 9 летательного аппарата до точки на оси движения, равноудаленной от центров симметрии аэродинамических поверхностей 2 аэродинамического подъемно-тянущего движителя 1.
В летательном аппарате хвостовой винт 12 может быть выполнен двухступенчатым со ступенями противоположного вращения (на чертеже не показано).
На режимах вертикального полета (подъем, висение, снижение) летательного аппарата (фиг.2) аэродинамическим подъемно-тянущим движителем 1 создается общая аэродинамическая сила 15, направленная наклонно в бок, раскладываемая на подъемную аэродинамическую силу 16 и боковую аэродинамическую силу 17. Хвостовым винтом 12 создается поперечная тяга 18. Направление вращения аэродинамического подъемно-тянущего движителя 1 относительно оси Y показано стрелкой 19, а образующийся реактивный момент показан стрелкой 20. Момент, создаваемый поперечной тягой 18 хвостового винта 12 относительно оси Y, показан стрелкой 21.
На режиме горизонтального полета летательного аппарата (фиг.3) аэродинамическим подъемно-тянущим движителем 1 создается общая аэродинамическая сила 22, направленная наклонно в бок и вперед, раскладываемая на подъемную аэродинамическую силу 23, боковую аэродинамическую силу 24 и горизонтальную аэродинамическую силу 25. Направление полета показано стрелкой 26. Горизонтальная составляющая тяги 27 и поперечная составляющая тяги 28 хвостового винта 12 образованы от общей тяги 29 хвостового винта 12 при его повороте в горизонтальной плоскости.
Направление вращения аэродинамического подъемно-тянущего движителя относительно оси Y показано стрелкой 30, а образующийся реактивный момент показан стрелкой 31. Момент, создаваемый поперечной тягой 28 хвостового винта 12 относительно оси Y, показан стрелкой 32. Момент на пикирование относительно оси Z от горизонтальной аэродинамической силы 25 показан стрелкой 33, а компенсирующий его момент от горизонтальной составляющей тяги 27 хвостового винта 12 показан стрелкой 34.
Полет летательного аппарата осуществляется следующим образом.
Используют аэродинамический подъемно-тянущий движитель 1 с тремя аэродинамическими поверхностями 2. Каждая аэродинамическая поверхность 2 движется по окружности в направлении, указанном стрелкой 3, относительно оси движения 6 и синхронно вращается в противоположную сторону по стрелке 4 относительно оси вращения 5, параллельной оси движения 6, с угловой скоростью, равной угловой скорости движения по окружности. Вследствие создания поступательного движения аэродинамических поверхностей 2 обеспечивается равномерное распределение аэродинамических сил по аэродинамическим поверхностям 2, приводящее к высокой эффективности создания подъемной силы. Каждая аэродинамическая поверхность 2 совершает колебания синхронно с вращением относительно двух взаимно перпендикулярных осей 7 и 8, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения 5 аэродинамической поверхности 2, причем одна из плоскостей проходит через ось движения 6 по окружности и ось вращения 5 аэродинамической поверхности 2, при этом вместе с подъемной силой 23 создается и горизонтальная тяга 25, причем распределение аэродинамических сил на аэродинамических поверхностях 2 остается равномерным.
При вертикальном полете (подъем, висение, снижение) летательного аппарата действуют подъемная аэродинамическая сила 16 и боковая аэродинамическая сила 17, создаваемые аэродинамическим подъемно-тянущим движителем 1. При вращении аэродинамического подъемно-тянущего движителя 1 по стрелке 19 создается крутящий момент, а корпус 10, реагируя на крутящий момент, создает реактивный момент по стрелке 20. Хвостовой винт 12, создавая поперечную тягу 18, создает компенсирующий момент по стрелке 21.
Боковая аэродинамическая сила 17 аэродинамического подъемно-тянущего движителя 1 уравновешивает поперечную тягу 18 хвостового винта 12.
Подъемная аэродинамическая сила 16 и боковая аэродинамическая сила 17 создают взаимно уравновешивающие друг друга моменты относительно оси X.
При горизонтальном полете летательного аппарата действуют подъемная аэродинамическая сила 23, боковая аэродинамическая сила 24 и горизонтальная аэродинамическая сила 25 аэродинамического подъемно-тянущего движителя 1, создаваемые при его работе. Под действием горизонтальной аэродинамической силы 25 летательный аппарат движется в направлении полета по стрелке 26. Реактивный момент, показанный стрелкой 31, компенсируется моментом по стрелке 32, создаваемым поперечной тягой 28 хвостового винта 12 относительно оси Y. Момент на пикирование по стрелке 33 относительно оси Z от горизонтальной аэродинамической силы 25 компенсируется возвратно-поступательным вертикальным перемещением хвостового винта 12 на определенное расстояние и поворотом в горизонтальной плоскости относительно вертикальной оси 14 на угол менее 90° в сторону начала корпуса 10. Разница моментов относительно оси X, создаваемая боковой аэродинамической силой 24, направленной в одну сторону, и подъемной аэродинамической силой 23, направленной в противоположную сторону, уравновешивается поперечной составляющей тяги 28 хвостового винта 12 при его возвратно-поступательном вертикальном перемещении на определенное расстояние.
Выбор величины угла поворота вала вращения 13 хвостового винта 12 в сторону начала корпуса 10 и величины расстояния при его вертикальном перемещении обусловлен необходимостью уравновешивания всех моментов, действующих на летательный аппарат на режиме горизонтального полета.
Выбор величины угла наклона оси движения 6 аэродинамического подъемно-тянущего движителя 1 относительно вертикали обусловлен выбором величины боковой аэродинамической силы 17, которая должна уравновешивать поперечную тягу 18 хвостового винта 12 на режиме вертикального полета.
Угол наклона оси движения 6 аэродинамического подъемно-тянущего движителя 1 в сторону смещения относительно вертикали менее 10° обусловлен необходимостью сохранения достаточной подъемной силы для полета.
Выбор величины расстояния смещения оси движения 6 аэродинамического подъемно-тянущего движителя 1 от продольной плоскости симметрии корпуса 12 обусловлен созданием взаимно уравновешивающих моментов относительно оси Х от боковой аэродинамической силы 17 и подъемной аэродинамической силы 16.
При полете летательного аппарата в случае выполнения хвостового винта двухступенчатым со ступенями противоположного вращения реактивный момент, создаваемый от действия хвостового винта, уменьшается за счет взаимного уравновешивания вращающих моментов каждой ступени противоположного вращения.
Предложенный летательный аппарат вертикального взлета и посадки с аэродинамическим подъемно-тянущим движителем позволяет осуществить полет летательного аппарата с высокой энергетической эффективностью.


Изобретение относится к области авиационной техники. Летательный аппарат содержит корпус 10 с хвостом 11, аэродинамические подъемно-тянущий движитель, установленный сбоку на конце хвоста 11 хвостовой винт 12, вал вращения 13 которого установлен горизонтально с возможностью поворота в горизонтальной плоскости на угол менее 90° и возможностью вертикального перемещения. Ось движения движителя 1 смещена относительно продольной плоскости симметрии корпуса 10 в сторону, противоположную хвостовому винту 12, и установлена с наклоном в сторону смещения на угол менее 10° относительно вертикали. Хвостовой винт 12 может быть выполнен двухступенчатым со ступенями противоположного вращения. Технический результат - расширение арсенала технических средств. 1 з.п. ф-лы, 3 ил.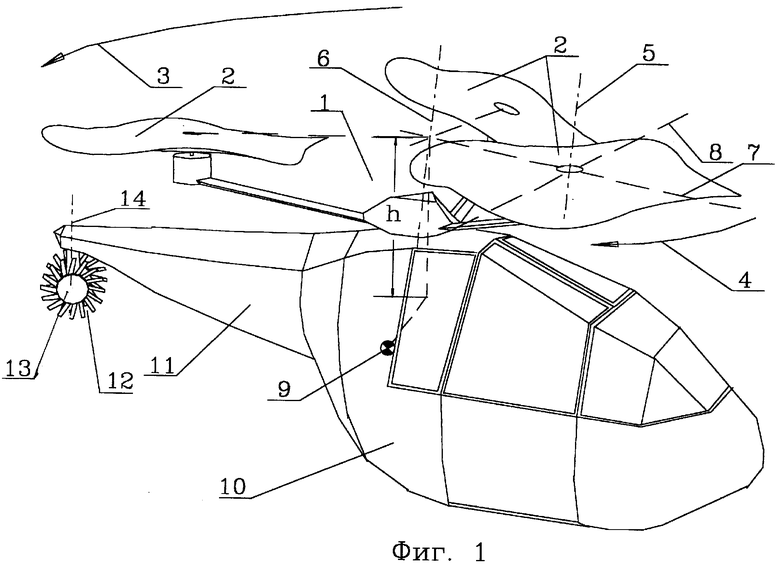
| RU 2001836 C1, 30.10.1993.US 3873049 A, 25.03.1975.GB 191100097 A, 28.09.1911. |

