Область техники
Настоящее изобретение относится к способу и устройству для оценки веса транспортного средства. В частности, данное изобретение относится к способу и устройству согласно преамбулам независимых пунктов формулы изобретения. Данное изобретение относится также к компьютерной программе и компьютерному программному продукту, к использованию веса, оцененного согласно данному изобретению, и к моторному транспортному средству, которое содержит по меньшей мере одно такое устройство.
Уровень техники, к которому относится изобретение
В системах автоматического переключения передач для транспортных средств с ручной коробкой передач, выбор передачи основан на различных параметрах, например уклон дороги и сопротивление движению транспортного средства. Для системы переключения передач, чтобы сделать правильный выбор переключения передачи, может быть нужна информация о весе транспортного средства. Это является чрезвычайно важным, когда транспортное средство приводится в движение из неподвижного состояния, так как правильный выбор передачи может быть решающим для того, сможет ли оно сдвинуться или нет. Обычно различные оценки веса транспортного средства делаются, когда оно находится в движении/работе, и итоговый вес выбирается и затем используется как входной параметр в системе переключения передач для вычисления соответствующей передачи.
Известные способы для оценки веса транспортного средства основаны на ускорении транспортного средства и на информации от любой системы пневматической подвески, которой оснащено транспортное средство.
В случае транспортных средств с системами обнаружения загрузки, например, системами пневматической подвески, известный способ для оценки веса транспортного средства основан на пневматической подвеске. В такой системе измеряется давление на ось и может быть напрямую преобразовано в вес транспортного средства посредством информации о типе транспортного средства. Этот способ может быть также использован для оценки веса транспортного средства, когда оно является неподвижным. Другие известные способы для оценки веса основаны на ускорении и/или замедлении транспортного средства, но страдают от ограничения, что оценивание веса транспортного средства может быть выполнено, только когда оно находится в движении.
Специализированные транспортные средства являются типом транспортного средства, используемого в целях тяжелой работы, например, самосвалы, карьерные/рудничные грузовые автомобили и лесовозы. Эти типы транспортных средств обычно не имеют пневматической подвески, но имеют систему с листовой рессорой, которая не является системой обнаружения загрузки. Это означает, что вес этих типов транспортных средств не может быть оценен, когда они являются неподвижными, так как его оценка обычно привлекает использование уравнения сил F=m·a, которое не применимо, когда транспортное средство является неподвижным и его ускорение вследствие этого равно нулю.
В ситуации, где происходила разгрузка/загрузка транспортного средства, любая оценка его результирующего веса на основании его веса до операции разгрузки/загрузки даст в результате неправильный выбор передачи, потому что его вес будет существенно изменен вышеуказанной разгрузкой/загрузкой.
В таком обычном сценарии ненагруженное специализированное транспортное средство может передвигается вниз в карьер и загружаться там перед передвижением вверх из карьера с целью разгрузки. Когда транспортное средство приводится в движение после загрузки, система переключения передач будет основывать выбор передачи на самом последнем весе, оцененном перед операцией загрузки. Этот самый последний вес, оцененный перед операцией загрузки, будет существенно отличаться от результирующего нагруженного веса транспортного средства и может как раз привести к неправильному выбору передачи.
Это становится чрезвычайно опасным, когда оцененный вес является слишком низким относительно фактического веса, что дает в результате в основном две проблемы. Одной является то, что если оно приводится в движение из неподвижного состояния при такой высокой первоначальной передаче, что крутящий момент двигателя является недостаточным, чтобы преодолеть сопротивление движению, транспортное средство будет не способно сдвинуться, вызывая излишний износ сцепления. Такая ситуация может быть решена системой переключения передач посредством увеличения крутящего момента двигателя пока не будет преодолено сопротивление движению, что повлечет за собой необходимость выбора системой переключения передач другой, более низкой, первоначальной передачи. Второй проблемой является то, что если транспортное средство достигает обновления при слишком высокой передаче, оно в худшем случае будет предрасположенным к тому, чтобы заглохнуть и остановиться на возвышенности.
Другие отягощающие обстоятельства при оценке веса транспортного средства посредством уравнения сил возникают, когда земля, по которой передвигается транспортное средство, не имеет твердой и/или ровной поверхности, например, асфальта или бетона. Оценка является наиболее трудной на, например, мягкой поверхности дорожного покрытия, такой как песок или насыпной гравий, так как сопротивление качению сильно варьируется на таких поверхностях, делая трудным вычисление правильного сопротивления движению для использования при оценке веса транспортного средства.
Вышеупомянутое указывает, что существует потребность улучшенного способа для оценки веса транспортного средства по сравнению с существующим уровнем техники. В частности существует потребность способа для оценки веса неподвижных транспортных средств и/или транспортных средств, передвигающихся по мягким и/или неровным поверхностям, где способы известного уровня техники являются неприменимыми или менее применимыми.
Краткое описание данного изобретения
Цель настоящего изобретения состоит в том, чтобы предложить способ для оценки веса транспортного средства, которое полностью или частично преодолевает неполноценность и недостатки способов известного уровня техники для оценки веса транспортных средств.
Другая цель данного изобретения состоит в том, чтобы предложить способ, посредством которого оценка их веса возможна для транспортных средств, которые являются неподвижными и/или передвигаются по мягким и/или неровным поверхностям, где способы существующего уровня техники являются неприменимыми и непригодными.
Дополнительная цель данного изобретения состоит в том, чтобы предложить альтернативный и упрощенный способ для оценки веса транспортного средства по сравнению со способами существующего уровня техники.
Согласно аспекту данного изобретения, вышеупомянутые цели достигаются с помощью способа для оценки веса транспортного средства, содержащего этапы:
вычисления по меньшей мере первого веса m1 транспортного средства;
обнаружения того, происходила ли разгрузка/загрузка транспортного средства; и
оценки второго веса m2 транспортного средства на основании информации о его предыдущем весе.
Варианты осуществления вышеупомянутого способа заданы в зависимых пунктах формулы изобретения, имеющих отношение к данному способу.
Данное изобретение относится также к компьютерной программе и компьютерному программному продукту, относящимся к любому способу согласно данному изобретению. Данное изобретение относится также к использованию веса, оцененного любым способом согласно данному изобретению, и предпочтительно к использованию оцененного веса в качестве входного параметра при выборе передачи и/или стратегиях выбора передачи в моторном транспортном средстве.
Согласно другому аспекту данного изобретения, вышеупомянутые цели также достигаются с помощью устройства для оценки веса транспортного средства, устройство которого содержит по меньшей мере один блок вычисления и по меньшей мере один блок памяти и выполнено с возможностью:
вычисления по меньшей мере первого веса m1 транспортного средства;
обнаружения того, происходила ли разгрузка/загрузка транспортного средства; и
оценки второго веса m2 транспортного средства на основании информации о его предыдущем весе.
Устройство может быть также модифицировано согласно различным вариантам осуществления вышеупомянутого способа. Данное изобретение относится также к моторному транспортному средству, например, пассажирскому автомобилю, грузовому автомобилю или автобусу, которое содержит по меньшей мере одно такое устройство.
Настоящее изобретение предлагает способ и устройство, которые делают возможной оценку веса транспортного средства, когда оно является неподвижным. Данное изобретение может дополнительно предложить оценку веса транспортного средства при передвижении по мягким и/или неровным поверхностям, так как данное решение согласно данному изобретению делает возможным пренебрегать природой поверхности дорожного покрытия. Более того, если транспортное средство оборудовано одним или более акселерометрами, нет потребности устанавливать дополнительные датчики для оценки его веса, так как существующие акселерометры могут быть использованы при оценке его веса согласно варианту осуществления данного изобретения.
Дополнительные преимущества и применения способа и устройства согласно данному изобретению указаны посредством подробного описания, изложенного ниже.
Краткое описание чертежей
В подробном описании настоящего изобретения, изложенном ниже, варианты осуществления данного изобретения описаны со ссылкой на приложенные чертежи, в которых:
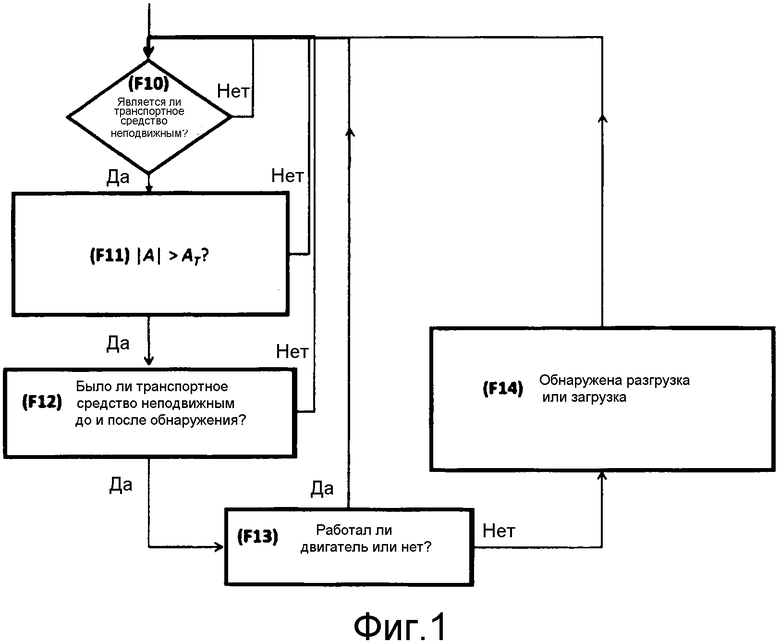
на фиг.1 показана блок-схема операций обнаружения разгрузки/загрузки согласно варианту осуществления изобретения;
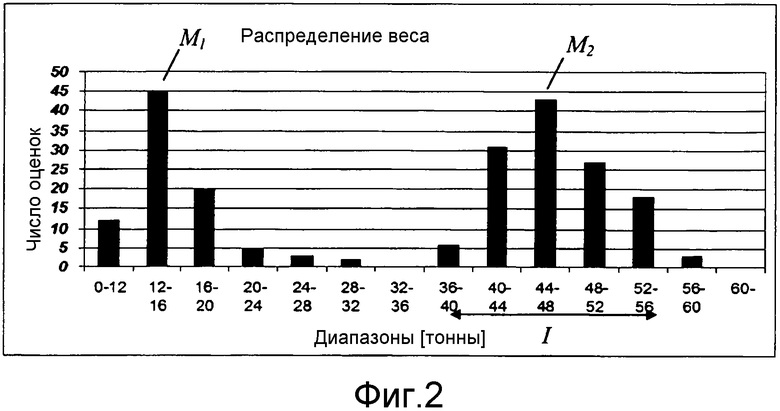
на фиг.2 изображен пример истории эксплуатации, представленной посредством столбцовой диаграммы предыдущих весов транспортного средства, поделенных на дискретные диапазоны;
на фиг.3 показана блок-схема операций того, как вес транспортного средства оценивается исходя из его истории эксплуатации;
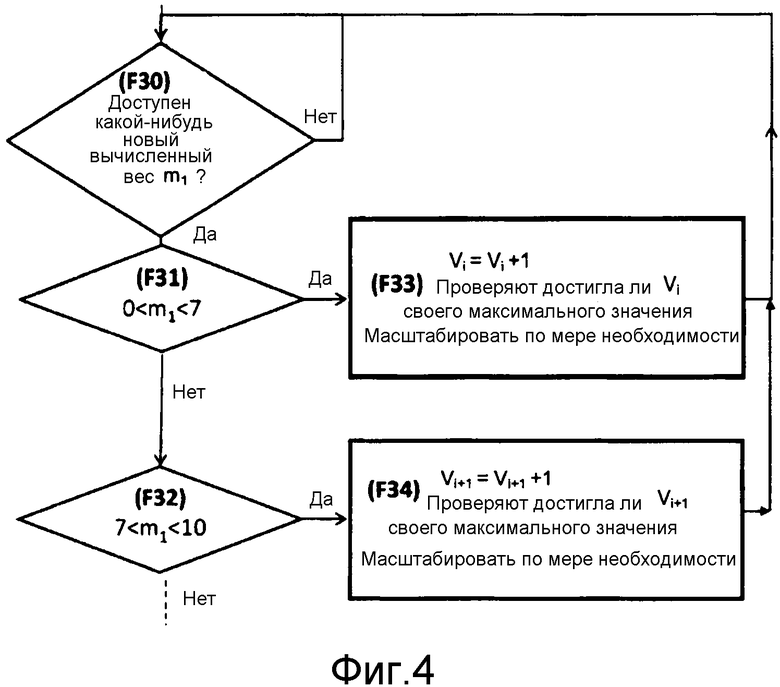
на фиг.4 показана блок-схема операций хранения истории эксплуатации в том, что касается чисел оценок;
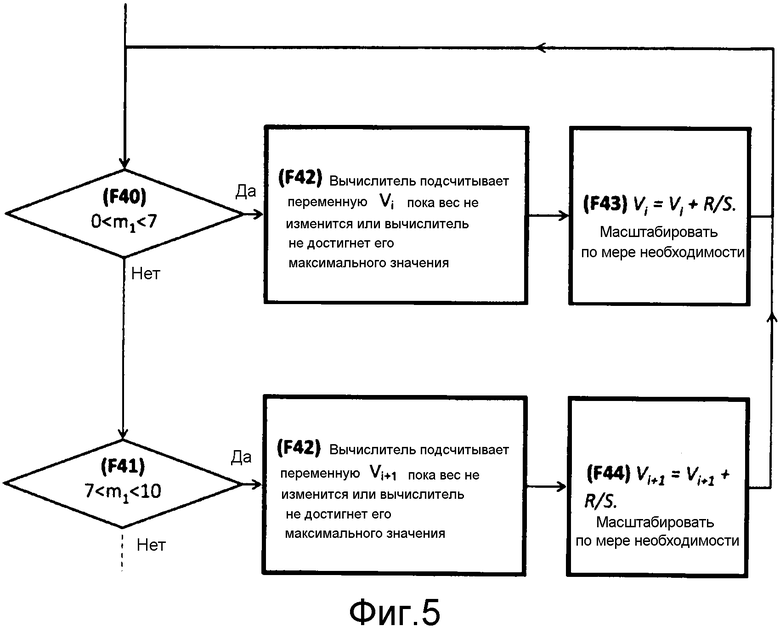
на фиг.5 показана блок-схема операций сохранения истории эксплуатации в том, что касается времени; и
на Фиг.6 изображен схематично блок управления, содержащий блок вычисления и блок памяти.
Подробное описание данного изобретения
Способы оценки веса транспортного средства посредством уравнения сил являются такими, что его вес не может быть оценен, когда оно является неподвижным, и эти способы также выдают очень слабые или вовсе не выдают оценок при определенных условиях, например, при оценке на мягких и/или неровных поверхностях дорожного покрытия, таких как песок или насыпной гравий.
Следовательно, настоящее изобретение предназначено для предложения улучшенного и/или альтернативного способа и устройства для оценки веса транспортного средства. Данный способ согласно данному изобретению содержит этапы вычисления по меньшей мере первого веса m1 транспортного средства, обнаружения того, происходила ли разгрузка/загрузка транспортного средства, и оценки второго веса m2 транспортного средства на основании информации о его предыдущем весе.
Основной концепцией данного изобретения является обнаружение того, происходила ли разгрузка/загрузка транспортного средства, для того, чтобы в дальнейшем оценить его вес, так как изобретатели обнаружили, что такое обнаружение имеет содержимое информации, которое может быть использовано при оценке веса транспортного средства.
Обнаружение может быть выполнено различными отличающимися способами, и согласно варианту осуществления изобретения это выполняется на основании одного или более сигналов от одного или более акселерометров, обеспеченных на транспортном средстве.
Это необычно, что транспортные средства, например специализированные транспортные средства и грузовые автомобили, имеют один или более акселерометров, скомпонованных в продольном направлении транспортного средства, например, на исполнительном механизме/исполнительных механизмах сцепления. Акселерометр, который измеряет ускорение в продольном направлении транспортного средства, измеряет также составляющую ускорения в результате гравитации, которая является параллельной с уклоном дороги, согласно формуле
as=aν+g·sin(α)
в которой as является значением от акселерометра, aν - ускорением транспортного средства, g - ускорением в результате гравитации и α - соответствующим/текущим уклоном дороги, воздействующим на транспортное средство. Акселерометр используется, чтобы сделать оценки веса транспортного средства в течение его ускорения/замедления и для оценки уклона дороги, воздействующего на транспортное средство.
Акселерометр может быть таким образом использован для обнаружения изменения уклона, которое воздействует на транспортное средство. Часть изобретательского уровня, сделанного изобретателями, является их осознанием того, что эта информация может быть использована для обнаружения того, происходила ли разгрузка/загрузка. Если операция разгрузки/загрузки дает в результате достаточно большое перемещение транспортного средства, акселерометр зарегистрирует изменение, делая возможным обнаружение/обнаружение разгрузки/загрузки.
Чтобы исключить другие факторы, которые могут воздействовать на обнаружение акселерометром, применимы определенные условия для достоверного обнаружения. Первым и самым главным для акселерометра, чтобы быть способным вообще что-либо зарегистрировать, является проверка, что транспортное средство является неподвижным в течение разгрузки/загрузки, т.е. посредством изучения скорости вращения карданного вала, и что зажигание транспортного средства включено. Примеры дополнительных условий, которым иногда надо отвечать для гарантии, что то, что обнаружено на самом деле, является операцией разгрузки/загрузки, которая содержит проверку того, что отклонение акселерометра происходит не в результате ускорения или замедления, вызванных приведением в движение транспортного средства или остановкой.
Вариант осуществления данного изобретения изучает амплитуду сигнала/сигналов от акселерометра/акселерометров, когда транспортное средство является неподвижным. Если амплитуда сигнала |A| превышает пороговое значение AT, которое выше, чем амплитуда шума сигнала |AN|, то проверка выполняется для гарантии того, что изменение амплитуды не вызвано просто приведением в движение транспортного средства или остановкой, или запуском или выключением двигателя. Если это не данный случай, то, что является обнаруженным согласно этому варианту осуществления изобретения, является операцией разгрузки/загрузки. Большая доля шума сигнала от акселерометров вызвана вибрациями от двигателя. Преимуществом обнаружения акселерометрами является то, что обнаружение разгрузки/загрузки может быть выполнено, когда транспортное средство является неподвижным.
Блок-схема операций на фиг.1 иллюстрирует обнаружение разгрузки/загрузки согласно вариантам осуществления изобретения, описанным выше. Этап F10 проверяет, что транспортное средство является неподвижным. Если это не так, обнаружение не происходит, но если транспортное средство является неподвижным, то этап F11 сравнивает, превышает ли или нет амплитуда |A| сигнала (от акселерометра) пороговое значение AT. Если это так, то этап F12 делает дополнительную проверку, чтобы увидеть было ли транспортное средство неподвижным до и после обнаружения, которое может быть выполнено посредством изучения скорости вращения карданного вала (которая будет ноль, если транспортное средство является неподвижным) относительно того, когда амплитуда |A| сравнивается с пороговым значением AT. Если обнаружено на этапе F12, что транспортное средство было неподвижным, следующий этап F13 проверяет также, работал ли двигатель или нет, посредством изучения скорости вращения двигателя и сигнала зажигания (сигнал, указывающий включено ли зажигание или нет), так как сигнал от акселерометра мог быть подвергнут воздействию/искажен посредством запуска или выключения двигателя. Если двигатель не работал, этот вариант осуществления обнаруживает разгрузку/загрузку транспортного средства.
Определенные типы транспортных средств имеют двойную схему загрузки, тем самым они либо по существу ненагружены, либо полностью нагружены. Эти типы транспортных средств вследствие этого имеют либо низкий (ненагруженный), либо большой (полностью нагруженный) вес, например, специализированные транспортные средства для перевозки добытого материала. Для транспортных средств с такой двойной схемой загрузки, желательно, чтобы было записано только обнаружение законченной разгрузки/загрузки, так как разгрузка/загрузка может происходить постадийно, например грузовой автомобиль для перевозки гравия может принять несколько загрузочных масс ковша до того, как его грузовместимость полностью использована. Такая процедура загрузки могла бы иначе привести к обнаружению каждой стадии процесса загрузки как отдельной законченной операции разгрузки/загрузки. Таких ситуаций можно избежать посредством наложения условия, что транспортное средство должно передвигаться определенное расстояние и/или выше определенной скорости до того, как новая операция разгрузки/загрузки считается обнаруженной акселерометрами, например, передвигаясь на по меньшей мере 100 м или при более 10 км/ч.
Также иногда возникают ситуации, где разгрузка/загрузка транспортного средства происходит необнаруженной, когда оно является неподвижным, например, если его зажигание выключено в течение процедуры разгрузки или загрузки и акселерометры используются для обнаружения.
Согласно другому варианту осуществления данного изобретения, в такой ситуации, обнаружение разгрузки/загрузки влечет за собой использование первого вычисленного веса m1 (вычисленного до разгрузки/загрузки) и третьего вычисленного веса m3. Согласно этому варианту осуществления, разница, определяемая в абсолютном выражении, между первым весом m1 и впоследствии вычисленным третьим весом m3 может сравниваться с обнаружением того, произошла ли разгрузка/загрузка. Если вышеуказанная разница принимает значение выше порогового значения T, этот вариант осуществления обнаруживает операцию разгрузки или загрузки, т.е. если |m1-m3| > Т. В отличие от этого, если вышеуказанная разница принимает значение ниже порогового значения Т, разгрузка/загрузка не обнаруживается. Пороговое значение T зависит среди прочего от первого веса m1 транспортного средства, так как относительная/процентная разница между весами m1 и m3 является относительной в этом случае.
Третий вес m3 вычисляется после первого веса m1, предпочтительно относительно короткое время после того, как транспортное средство было приведено в движение, т.е. когда транспортное средство сдвинулось. Так как третий вес m3 вычисляется вскоре после того как транспортное средство сдвинулось, это вычисление выдаст для его веса приблизительно вычисленное значение, которое может отличаться существенно от его фактического веса. Причиной является то, что параметры, например, различные силы в уравнении сил (если таковое используется), для вычисления третьего веса m3 не всегда полностью известны сразу после того, как транспортное средство было приведено в движение, так вычисление третьего веса m3 основано на неполной информации о соответствующих силах и возможно других параметров.
Другим осознанием и основной концепцией данного изобретения является использование информации о предыдущем весе транспортного средства для того, чтобы оценивать его текущий вес. Вышеуказанная информация получена предпочтительно из истории эксплуатации транспортного средства, которая согласно предпочтительному варианту осуществления данного изобретения влечет за собой историю эксплуатации его предыдущих весов за предшествующий период времени P, хранящуюся для последующего использования при оценке его текущего веса. История эксплуатации транспортного средства является накоплением информации о различных значениях веса, которые транспортное средство исторически получало, и вследствие этого содержит информацию, которая используется в настоящем изобретении для того, чтобы оценивать его текущий вес.
Период P является параметром, который может быть выбран согласно обстоятельствам транспортного средства. Этот параметр воздействует на статистическую основу истории эксплуатации во времени. Разные типы транспортных средств имеют разные схемы эксплуатации касательно числа операций разгрузки/загрузки за единицу времени, так что период P может быть выбран или адаптирован к этим схемам загрузки.
Согласно другому варианту осуществления данного изобретения, информация о предыдущем весе транспортного средства является распределением его веса в течение заданного периода P. На Фиг.2 проиллюстрирован пример такого распределения веса для специализированного транспортного средства. На Фиг.2 распределены предыдущие веса на дискретные диапазоны, изложенные в этом примере в виде столбцовой диаграммы, в которой ось y обозначает число раз, которое предыдущий вес транспортного средства был в пределах заданного диапазона, и ось x обозначает вес в тоннах.
Распределение на фиг.2 также имеет первый пик M1 (левый пик, который является первым локальным максимумом) и второй пик M2 (правый пик, который является вторым локальным максимумом). Первый пик соответствует более раннему весу, который транспортное средство допускало наиболее часто, когда ненагружено, и второй пик аналогично соответствует прежнему весу, который транспортное средство исторически получало наиболее часто, когда нагружено.
Соответствующие пики M1 и M2 на фиг.2 могут вследствие этого, каждый, быть интерпретированы как значение веса, которое транспортное средство наиболее часто получало, когда по существу ненагружено (левый пик) или по существу полностью нагружено (правый пик) согласно истории эксплуатации конкретного транспортного средства. Это распределение с двумя пиками на Фиг.2 является обычным для транспортных средств, которые обычно или по существу имеют двойную схему загрузки.
Если операция разгрузки или загрузки обнаружена, когда транспортное средство является неподвижным (например, акселерометрами), дополнительная информация, которая доступна согласно варианту осуществления изобретения, содержит распределение предыдущего веса согласно истории эксплуатации транспортного средства и вычисляет первый вес m1 транспортного средства до разгрузки или загрузки (например, вычисленный посредством уравнения сил), так что вычисление первого веса m1 происходит до этапа обнаружения согласно этому варианту осуществления.
Более того, допуская, что транспортное средство является специализированным транспортным средством и вследствие этого обычно передвигается полностью нагруженным или разгруженным (т.е. двойная схема загрузки, как упомянуто выше), распределение веса согласно истории эксплуатации будет иметь два пика M1 и M2, такие что первый пик M1 соответствует весу mL пустого транспортного средства и второй пик M2 весу mH полностью загруженного транспортного средства. Чтобы оценить второй вес m2, первый вес m1 сравнивается с этими двумя пиками (фактически значениями весов, соответствующих этим двум пикам) в том, что касается разницы между первым весом m1 и соответствующими весами пиков, т.е. mL и mH.
Веса mL и mH, при которых вышеуказанные разницы являются наименьшими, являются ближайшими к первому весу m1 до операции разгрузки/загрузки, и на основании обнаружения того, что транспортное средство стало разгруженным/загруженным, отличные от весов mL или mH могут вследствие этого представлять оцененный второй вес m2. Математически это может быть описано как оцененный вес, т.е. второй вес m2, оцениваемый как
m2 = mL если |m1 - mL| > |m1 - mH| и 
m2 = mH если |m1 - mL| ≤ |m1 - mH|
что означает, что второй вес m2 в этом случае оценивается на основании первого веса m1, вычисленного до операции разгрузки/загрузки, и истории эксплуатации транспортного средства.
Вышеупомянутый вариант осуществления данного изобретения проиллюстрирован на функциональной схеме на фиг.3. Этап F20 обнаруживает происходила ли разгрузка/загрузка и, если это является таким случаем, этап F21 предоставляет первый вес m1, вычисленный до разгрузки/загрузки. Этап F21 также определяет вес mL ненагруженного транспортного средства и вес mH полностью нагруженного транспортного средства исходя из его истории эксплуатации посредством обнаружения соответствующих первого и второго локальных максимумов M1 и M2. Этап F22 затем проверяет удовлетворяется ли условие согласно уравнению F22 и, если это является таким случаем, этап F24 оценивает второй вес m2 как m2 = mH. Если это не является таким случаем, этап F23 оценивает второй вес m2 как m2 = mL. Этап F25 затем использует второй вес m2, например, как входной параметр для выбора передачи в системе переключения передач транспортного средства, пока не придет к дополнительно вычисленным значениям веса, например, посредством уравнения сил. Этот вариант осуществления делает возможной оценку веса транспортного средства, даже когда оно является неподвижным.
Дополнительный вариант осуществления данного изобретения использует третий вес m3 при оценке второго веса m2.
Если обнаружение выполнено после того, как транспортное средство сдвинулось, используя первый вес m1 и третий вес m3, описанные выше, согласно условию |m1 - m3| > T, и третий вес m3 может быть также использован для оценки второго веса m2. Так как это является примерным вычислением (благодаря неполной информации о соответствующих параметрах), третий вес m3 не выбирается в качестве прямой оценки второго веса, но оценка второго веса m2 основана вместо этого на использовании содержимого информации в третьем весе m3.
Посредством изучения диапазона I около третьего веса m3, возможно оценить второй вес m2 на основании значения третьего веса m3. Если такой диапазон I содержит локальный максимум (M1, M2), второй вес может быть оценен как значение, соответствующее вышеуказанному локальному максимуму, например, mL или mH, описанным выше. Другими словами, второй вес m2 оценивается как значение, соответствующее локальному максимуму, который является ближайшим к третьему весу m3 в пределах диапазона I.
Например, если третий вес m3 вычисляется при 39 тоннах и изученный диапазон I содержит два смежных низкий и высокий диапазоны при распределении на фиг.2, второй вес m2 будет в этом примере оценен как m2 = mH = 48 тонн (принимая высокое значение для диапазона 44 - 48 тонн). Диапазон I может, например, быть определен как I = m3 +/- d, где d является избираемым параметром, который определяет размер диапазона I около значений третьего веса m3, но диапазон I может быть также задан как процент третьего веса m3, с третьим весом m3 в качестве основы, т.е. представляя 100%. Следует отметить, что диапазон I не должен быть симметричным около третьего веса m3.
Дополнительный вариант осуществления данного изобретения также использует третий вес m3 с первым весом m1 при оценке второго веса m2 для того, чтобы уточнить эту оценку.
Этот способ приходит к первому оцененному значению второго веса m2, когда транспортное средство является неподвижным, посредством использования варианта осуществления, описанного выше, в котором второй вес m2 оценивается как m2 = mL, если |m1-mL|>|m1-mH| и как m2 = mH, если |m1-mL|≤|m1-mH|. Когда транспортное средство начинает движение, можно также прийти к одному или более значениям третьего веса m3 посредством вычисления, например посредством уравнения сил. Ко второй оценке (и возможно дополнительным оценкам) второго веса m2 можно прийти на основании третьего веса m3 посредством использования классификации диапазонов истории эксплуатации, так что второй вес m2 оценивается как квантование третьего веса m3. Эта процедура оценки посредством квантования может быть затем повторена, если пришли к дополнительным значениям третьего веса m3.
Первый вес m1 и/или третий вес m3 предпочтительно вычисляются посредством уравнения сил для транспортного средства, которое в варианте осуществления принимает вид

где a является ускорением транспортного средства, Ft - силой тяги транспортного средства, Fr - сопротивлением качению для транспортного средства, Fa - сопротивлением воздуха для транспортного средства и Fα - сопротивлением, вызванным текущим уклоном дороги, воздействующим на транспортное средство.
Чтобы иметь возможность основывать оценку веса транспортного средства на его истории эксплуатации, история эксплуатации его веса должна храниться и быть доступной таким образом, чтобы вес мог быть оценен на основании вышеуказанной истории. По этой причине, история эксплуатации веса транспортного средства должна непрерывно сохраняться и храниться для последующего использования при оценке.
Так как пространство памяти для хранения информации о предыдущих весах, например истории эксплуатации, часто ограничено во многих транспортных средствах, желательно использовать способ хранения, который справляется с этим ограничением памяти. Такой способ нуждается в предоставлении соответствующей информации о распределении веса во времени без привлечения слишком большой емкости памяти.
Вариант осуществления настоящего изобретения вследствие этого раскладывает вес транспортного средства по его истории эксплуатации на число предварительно определенных диапазонов. Каждый диапазон может быть размещенной в памяти переменной, чье значение соответствует числу оценок веса в пределах соответствующего диапазона. Взятые вместе, все переменные вследствие этого описывают распределение веса транспортного средства по различным диапазонам, например смотри фиг.2. Изобретатели среди прочего применили диапазоны, изображенные на фиг.2 в тоннах, к определенным типам специализированных транспортных средств, но следует отметить, что классификация диапазонов зависит среди прочего от фактического веса транспортного средства и желаемого разрешения для оценки. Фактический вес относится как к ненагруженному, так и к нагруженному, так как важно, что классификация диапазонов истории эксплуатации имеет соответствующие пики, например M1 и M2 на фиг.2, для классификации диапазонов, чтобы быть пригодной для оценки веса транспортного средства. Этот способ дискретных диапазонов представляет процедуру экономии памяти для хранения истории эксплуатации.
Любой вновь вычисленный вес, который становится доступным, добавляется непрерывно к истории эксплуатации. Это выполнено посредством сравнения, чтобы увидеть попадает ли вычисленный вес в пределы ограничений диапазона. Если это сравнение проводится от самого низкого диапазона к более высоким диапазонам, вычисленный вес попадет в пределы самого низкого диапазона, в котором сравнение показывает, что он подходит. Когда правильный диапазон был определен, история эксплуатации может быть обновлена.
На фиг.4 и 5 показаны две разные функциональные схемы для хранения истории эксплуатации касательно веса, разделенного на дискретные диапазоны согласно двум разным вариантам осуществления данного изобретения. На фиг.4 изображена история эксплуатации в том, что касается числа оценок, и на фиг.5 - история эксплуатации в том, что касается величины времени, в течение которого вес транспортного средства допускал значение определенного диапазона.
Блок-схема операций на фиг.4 проверяет на этапе F30, доступен ли вновь вычисленный первый вес m1, и в этом случае его значение сравнивается на следующем этапе F31 с верхним ограничением для первого диапазона (7 тонн в этом примере). На этапе F33 значение переменной Vi, представляющей первый диапазон (i = 1), обновляется на одну ступень, т.е., Vi = Vi+1, если первый вес m1 находится ниже верхнего ограничения для первого диапазона. Но если на этапе F31 первый вес m1 больше, чем ограничение для первого диапазона, его значение сравнивается на этапе F32 с ограничением для следующего диапазона (10 тонн), и если оно ниже этого ограничения, значение переменной Vi+1, представляющей второй диапазон (i = 2), обновляется на этапе F34 на одну единицу, т.е., Vi+1 = Vi+1+1. Иначе, первый вес m1 сравнивается со значением ограничения для следующего диапазона, и так далее. Смотри ниже касательно масштабирования переменной Vi.
На функциональной схеме на фиг.5 значение первого веса m1 сравнивается на этапе F40 с верхним ограничением для первого диапазона (7 тонн в этом примере), если вновь вычисленный первый вес m1 доступен. На этапе F42 вычислитель начитает считать, чтобы увидеть находится ли первый вес m1 ниже верхнего ограничения для первого диапазона, что заставляет вычислитель считать пока значение первого веса m1 не изменится, или пока вычислитель не достигнет его наибольшего значения; этому следуют на этапе F43 посредством переменной Vi, обновляемой посредством значения вычислителя R (= числу выборок в пределах соответствующего диапазона), преобразованного в минуты посредством коэффициента масштабирования S (= частоте выборки * 60, если частота выборки составляет Гц и единица времени составляет минуты) согласно Vi=Vi+R/S. Переменная Vi таким образом указывает в единицах времени (минутах в этом примере), как долго первый вес m1 был в пределах первого диапазона. Но если первый вес m1 больше, чем ограничение для первого диапазона, сравнение выполняется на этапе F41 с ограничением для следующего диапазона (10 тонн). На этапе F42 вычислитель начитает считать, является ли первый вес m1 ниже, чем ограничение для этого диапазона, что заставляет вычислитель считать пока значение первого веса m1 не изменится или пока вычислитель не достигнет его наибольшего значения; этому следуют на этапе F44 посредством переменной Vi+1, представляющей второй диапазон, подсчитываемый с помощью Vi+1= Vi+1+R/S. Иначе, первый вес m1 сравнивается со значением ограничения для следующего диапазона, и так далее. Смотри ниже касательно масштабирования переменной Vi.
В компьютерной реализации процедуры хранения истории эксплуатации согласно любому из вариантов осуществления, описанных выше, каждый тип данных (представляющий переменную Vi), например целое число или число с плавающей запятой, обычно имеет максимально возможное значение, которое он может допустить. Для избежания переменной Vi, подсчитанной слишком высокого, и допуская неправильное значение, система хранения истории эксплуатации должна, после подсчета, проверить было ли достигнуто максимально возможное значение для переменной Vi или нет. Если было, то значения для всех диапазонов должны быть уменьшены. Причиной, по которой уменьшаются все диапазоны и не только диапазон, где переменная Vi принимает ее максимально возможное значение, является то, что система должна хранить в неприкосновенности взаимосвязи между различными диапазонами. Это важно, если распределение следует использовать при оценке нового веса транспортного средства согласно данному изобретению. Любое такое масштабирование выполняется на F33 и F34 на фиг.4 и на F43 и F44 на фиг.5.
Специалисты осознают, что способ для оценки веса транспортного средства согласно настоящему изобретению мог бы быть также реализован в компьютерной программе, которая, при исполнении на компьютере, побуждает компьютер применять данный способ. Компьютерная программа содержится на считываемом компьютером носителе компьютерного программного продукта, который принимает вид подходящей памяти, например ROM (постоянной памяти), PROM (программируемой постоянной памяти), EPROM (стираемой PROM), флэш-памяти, EEPROM (электрически стираемой PROM), накопителя на жестком диске.
Второй оцененный вес m2 согласно данному изобретению может быть использован в транспортном средстве, предпочтительно при входном параметре в выборах передачи/ стратегиях выбора передачи в транспортном средстве. Однако второй оцененный вес m2 может быть также использован в других системах, в которых нужно знание веса транспортного средства, например, при управлении различными функциями транспортного средства.
Настоящее изобретение дополнительно относится к способу и устройству для оценки веса транспортного средства. Устройство выполнено с возможностью вычисления по меньшей мере первого веса m1 транспортного средства для обнаружения того, происходила ли разгрузка/загрузка транспортного средства, и для оценки второго веса m2 транспортного средства на основании информации о его предыдущем весе. Также следует отметить, что устройство может быть модифицировано, чтобы соответствовать разным вариантам осуществления данного способа согласно изобретению, описанному выше.
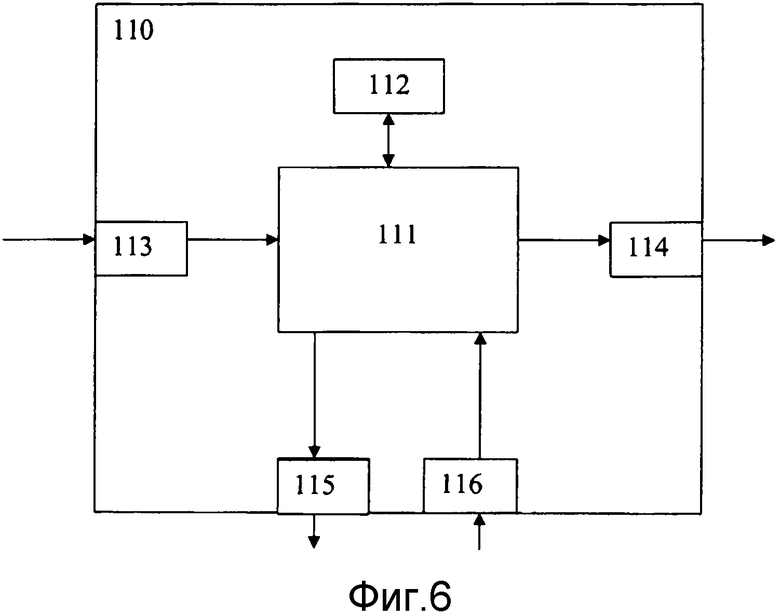
Устройство, описанное выше, может быть, например, реализовано в блоке 110 управления, например, ECU (электронном блоке управления), схематично изображенном на фиг.6. Блок управления 110 содержит блок 111 вычисления, который может принять вид по существу подходящего типа процессора или микрокомпьютера, например схемы для цифровой обработки сигналов (процессор цифровой обработки сигналов, DSP) или схемы с предварительно определенной специализированной функцией (специализированная интегральная микросхема, ASIC). Блок 111 вычисления присоединен к блоку 112 памяти, который включен в блок 110 управления и который предоставляет блоку 111 вычисления, например, хранящийся программный код и/или хранящиеся данные, которые нужны блоку 111 вычисления для того, чтобы он был способен выполнять вычисления. Блок 111 вычисления также адаптирован для хранения части или итоговых результатов вычислений в блоке 112 памяти.
Блок 110 управления дополнительно обеспечен устройствами 113, 114, 115, 116 для соответственного приема входных сигналов и отправки выходных сигналов. Эти входные и выходные сигналы могут содержать формы колебаний, импульсы или другие атрибуты, которые устройства 113, 116 приема сигналов могут детектировать как информацию и которые могут быть преобразованы в сигналы, которые являются обрабатываемыми блоком 111 вычисления. Блок 111 вычисления может быть затем обеспечен этими сигналами. Устройства 114, 115 отправки сигналов адаптированы для преобразования сигналов, принятых от блока 111 вычисления для того, чтобы, например, посредством их модулирования, создать выходные сигналы, которые могут быть переданы в другие части системы для определения точек понижения и повышения передачи. Специалист в данной области техники осознает, что вышеприведенный компьютер может принять вид блока 11 вычисления и что вышеприведенная память может принять вид блока 112 памяти.
Каждое из соединений с соответствующими устройствами для приема входных сигналов и отправки выходных сигналов может принять вид одного или более из кабеля, шины данных, например шины CAN (сети контроллеров), шины MOST (передачи данных мультимедийных систем) или некоторых других конфигураций шин, или беспроводного соединения. Соединения 70, 80, 90, 100 на фиг.6 могут также принять вид одного или более из этих кабелей, шин или беспроводных соединений.
Данное изобретение относится также к моторному транспортному средству, например пассажирскому автомобилю, грузовому автомобилю или автобусу, содержащему по меньшей мере одно устройство для оценки второго веса m2 согласно данному изобретению.
Наконец, следует отметить, что настоящее изобретение не ограничено вариантами осуществления данного изобретения, описанными выше, но относится к и содержит все варианты осуществления данного изобретения в рамках объема охраны приложенных независимых пунктов формулы изобретения.
При оценке веса транспортного средства, вычисляют первый вес m1 транспортного средства. Обнаруживают, происходила ли разгрузка/загрузка транспортного средства. И оценивают второй вес m2 транспортного средства на основании информации о его предыдущем весе. Обнаружение того, происходила ли разгрузка или загрузка, происходит на основании сигналов от акселерометров, установленных в транспортном средстве. Предложено также устройство для оценки веса транспортного средства, способ применения веса в транспортном средстве, моторное транспортное средство. Достигается оценка веса неподвижных транспортных средств или транспортных средств, передвигающихся по мягким или неровным поверхностям. 4 н. и 16 з.п. ф-лы, 6 ил.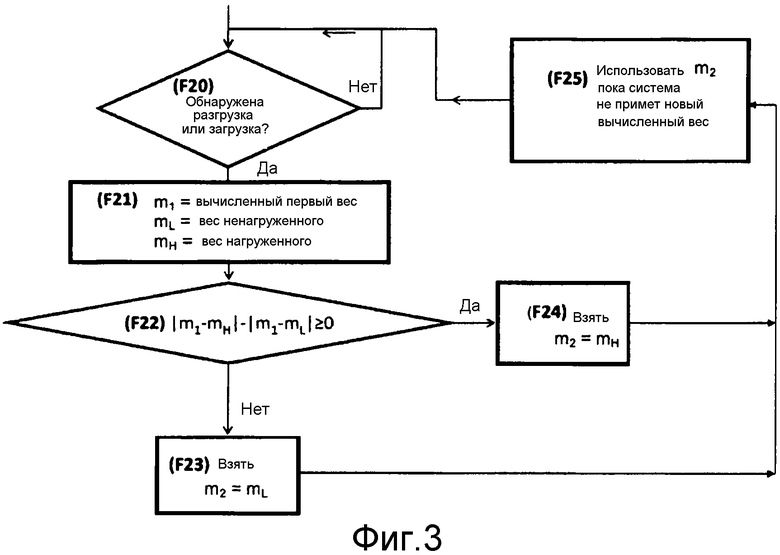
1. Способ для оценки веса транспортного средства, содержащий этапы, на которых:
вычисляют по меньшей мере первый вес m1 транспортного средства;
обнаруживают, происходила ли разгрузка/загрузка транспортного средства; и
оценивают второй вес m2 транспортного средства на основании информации о его предыдущем весе;
отличающийся тем, что обнаружение того, происходила ли разгрузка или загрузка, происходит на основании одного или более сигналов от одного или более акселерометров, обеспеченных в транспортном средстве.
2. Способ по п. 1, в котором информацию о предыдущем весе получают из истории эксплуатации для транспортного средства в течение периода Р времени.
3. Способ по п. 2, в котором информация о предыдущем весе принимает вид распределения веса транспортного средства в течение периода Р времени.
4. Способ по п. 3, в котором распределение разделяют на дискретные диапазоны.
5. Способ по любому из п.п. 3-4, в котором распределение принимает вид столбцовой диаграммы предыдущего веса транспортного средства.
6. Способ по любому из п.п. 3-4, в котором к распределению приходят посредством непрерывного сохранения вычисленного веса в течение работы.
7. Способ по любому из п.п. 3-4, в котором распределение содержит первый пик M1 и второй пик М2:
первый пик M1 которого обозначает вес mL ненагруженного транспортного средства, и
второй пик М2 которого обозначает вес mH нагруженного транспортного средства.
8. Способ по п. 7, в котором оценка второго веса m2 также основана на первом весе m1.
9. Способ по п. 8, в котором вторым весом m2 транспортного средства является
mL если |m1-mL|>|m1-mH| и
mH если |m1-mL|≤|m1-mH|.
10. Способ по любому из п.п. 1-4, 8-9, в котором операцию разгрузки или загрузки обнаруживают, если амплитуда упомянутого одного или более сигналов принимает значение большее, чем пороговое значение.
11. Способ по любому из п.п. 1-4, 8-9, дополнительно содержащий этап, на котором вычисляют по меньшей мере третий вес m3 транспортного средства, и в этом случае оценка второго веса m2 также основана на третьем весе m3.
12. Способ по любому из п.п. 1-4, дополнительно содержащий этап, на котором вычисляют по меньшей мере третий вес m3 транспортного средства, и в этом случае обнаружение того, происходила ли разгрузка или загрузка, основано на первом весе m1 и третьем весе m3, так что разгрузка или загрузка обнаружена, если разность между первым весом m1 и третьим весом m3 больше, чем пороговое значение Т: |m1-m3|>Т.
13. Способ по п. 12, в котором пороговое значение Т зависит от первого веса m1 транспортного средства.
14. Способ по п. 13, в котором оценка второго веса m2 также основана на третьем весе m3.
15. Способ по любому из п.п. 1-4, 8-9 или 13-14, в котором первый вес m1 и/или третий вес m3 вычисляют посредством уравнения сил для транспортного средства, и третий вес m3 вычисляют после первого веса m1.
16. Способ по п. 15, в котором уравнение сил для вычисления первого веса m1 и/или третьего веса m3 принимает вид:

в котором а является ускорением транспортного средства, Ft - силой тяги транспортного средства, Fr - сопротивлением качению для транспортного средства, Fa - сопротивлением воздуха для транспортного средства и Fα - сопротивлением, вызванным уклоном дороги, воздействующим на транспортное средство.
17. Способ по любому из п.п. 1-4, 8-9 или 13-14, в котором этап вычисления первого веса m1 происходит до этапа обнаружения того, происходила ли операция разгрузки или загрузки транспортного средства.
18. Использование веса оцененного способом для оценки веса транспортного средства по любому из п.п. 1-17 в транспортном средстве в качестве входного параметра при выборе передачи и/или в стратегиях выбора передачи в транспортном средстве.
19. Устройство для оценки веса транспортного средства, устройство которого содержит по меньшей мере один блок (111) вычисления и по меньшей мере один блок (112) памяти, и выполнено с возможностью:
вычисления по меньшей мере первого веса m1 транспортного средства;
обнаружения того, происходила ли разгрузка/загрузка транспортного средства; и
оценки второго веса m2 транспортного средства на основании информации о его предыдущем весе,
отличающееся тем, что один или более акселерометров обеспечены для отправки сигналов, на которых основано обнаружение того, происходила ли разгрузка/загрузка транспортного средства.
20. Моторное транспортное средство, например, пассажирский автомобиль, грузовой автомобиль или автобус, содержащее по меньшей мере одно устройство для оценки веса по п. 19.
| US 20100108406 A1, 06.05.2010 | |||
| СКРЕБКОВЫЙ РАБОЧИЙ ОРГАН | 1995 |
|
RU2085656C1 |
| Устройство для укладки монтажных жгутов | 1977 |
|
SU678737A1 |

