УРОВЕНЬ ТЕХНИКИ
1. Область техники, к которой относится изобретение
Настоящее изобретение относится к беговой дорожке, по которой можно идти в любом направлении без физического перемещения с одной небольшой площади. Беговая дорожка настоящего изобретения будет способной значительно усовершенствовать технологию погружения иммерсивной виртуальной реальности наряду со многими другими технологиями.
2. Описание предшествующего уровня техники
Несколько типов всенаправленных беговых дорожек или устройств с аналогичным функционированием являются известными. Одна такая беговая дорожка раскрыта в патенте Соединенных Штатов № 7780573 и использует множество бесконечных беговых дорожек без привода с высоким коэффициентом соотношения размеров, скрепленных друг с другом поперечно к плоскости вращения ленты, позволяя им перемещаться вместе аналогично гусеницам танка. Множество беговых дорожек затем приводится в движение посредством их побуждения проходить через несколько всенаправленных колес, которые приводят в движение множество беговых дорожек, при этом позволяя им проходить через всенаправленные колеса.
Другая большая всенаправленная беговая дорожка раскрыта в публикации патента Соединенных Штатов номер 20100022358 и использует ту же идею прикрепления множества бесконечных беговых дорожек друг с другом и снова их перемещения аналогично гусеницам танка.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В отличие от предшествующего уровня техники, как проиллюстрировано патентом Соединенных Штатов № 7780573, который требует множества лент, настоящее изобретение представляет собой всенаправленную беговую дорожку, которая использует только одну конвейерную ленту и гораздо проще по своей природе и проще для сооружения. Вместо наличия отдельной транспортерной ленты для каждого сегмента беговой дорожки всенаправленная беговая дорожка настоящего изобретения использует одну транспортерную ленту. Настоящее изобретение тем самым обеспечивает преимущества отсутствия необходимости сложного способа для соединения концевых роликов для передачи движения одной ленты на следующую, таким образом исключая необходимость отдельного регулирования натяжений на множестве лент. Эта одна лента подается от одной поперечной балки с высоким коэффициентом соотношения размеров на следующую. Все поперечные балки прикреплены к двум общим роликовым цепям, расположенным ниже и рядом с концом каждой балки. Эти общие роликовые цепи затем перемещаются по плоской траектории с помощью звездочек на каждом конце.
Поперечные балки, прикрепленные к роликовым цепям, приводятся в движение двигателем, соединенным со звездочками, вокруг которых проходят цепи. Это будет называться здесь направлением X. Перемещение в направлении Y обеспечивается посредством всенаправленных колес, размещенных рядом с и соприкасающихся с конвейерной лентой, когда она перемещается вокруг роликов, прикрепленных к концам поперечных балок.
Управление двигателями, которые приводят в движение всенаправленную беговую дорожку, может осуществляться с помощью нескольких способов. Одно средство заключалось бы во включении устройства обнаружения инфракрасного излучения, аналогичного Xbox Kinect, для отслеживания направления, скорости и ускорения пользователя на беговой дорожке и использования этой информации для поддержания пользователя в равновесии и главным образом в центре.
Хотя это наиболее вероятно является достаточным для движения, это лишает пользователя инерции, которую пользователь нормально ощущал бы при действительном движении. Например, как правило, если кто-либо бежал бы с максимальной скоростью, затем резко остановился бы без попытки замедлиться, то естественно упал бы вперед, или если на максимальной скорости кто-либо хотел бы быстро сменить направление без наклона в поворот, то снова упал бы. Конечно, естественное равновесие поддерживает ноги человека ниже их центра тяжести, поэтому это обычно не происходит.
На всенаправленной беговой дорожке, однако, так как имеет место относительно небольшое действительное движение, пользователь никогда не наклонялся бы в поворот или должен был бы наклоняться назад до остановки даже при быстром беге. Это наиболее вероятно давало бы пользователю противоречивое или незначительно несвязанное ощущение.
В соответствии с другим аспектом настоящего изобретения всенаправленная беговая дорожка выполнена таким образом, что она может наклоняться в обоих направлениях X и Y. Управление наклоном может быть связано с контроллером скорости, обеспечивающим возможность программирования всенаправленной беговой дорожки таким образом, чтобы наклоняться пропорционально небольшому ускорению пользователя. Всенаправленная беговая дорожка может быть запрограммирована наклоняться вверх в направлении этого ускорения, если пользователь увеличивал скорость, и вниз при снижении скорости, наклоняясь настолько высоко или низко и продолжаясь в течение того периода времени, как определяется управляющим ускорением. Этот наклон заставляет пользователя работать немного больше, точно как если бы она в действительности ускоряла ее собственный вес в направлении, в котором она бежала или поворачивала, давая ей ожидаемое ощущение, связанное с ускорением.
Другой или дополнительный способ управления беговой дорожкой настоящего изобретения заключается в использовании интерфейса динамического управления. Иллюстративный интерфейс управления, описанный здесь, прикрепляет пользователя к машине посредством вертлюжного снаряжения. Крепление позволяет пользователю наклоняться вперед, вбок, прыгать вверх и поворачивать в любом направлении. Оно также обеспечивает возможность ее ограниченного движения. Это движение предоставляет контроллеру положение и ускорение пользователя. Оно также обеспечивает возможность некоторого демпфирования ее движения для имитации инерции. Дополнительный признак этой системы заключается в том, что она обеспечивает средство для изменения кажущегося веса пользователя. Она может иметь такой большой или маленький вес, как она желает, через посредство интерфейса снаряжения. И еще другой признак заключается в том, что она обеспечивает то, что пользователь не может случайно сойти с платформы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет собой вид спереди человека, стоящего на беговой дорожке, выполненной в соответствии с настоящим изобретением.
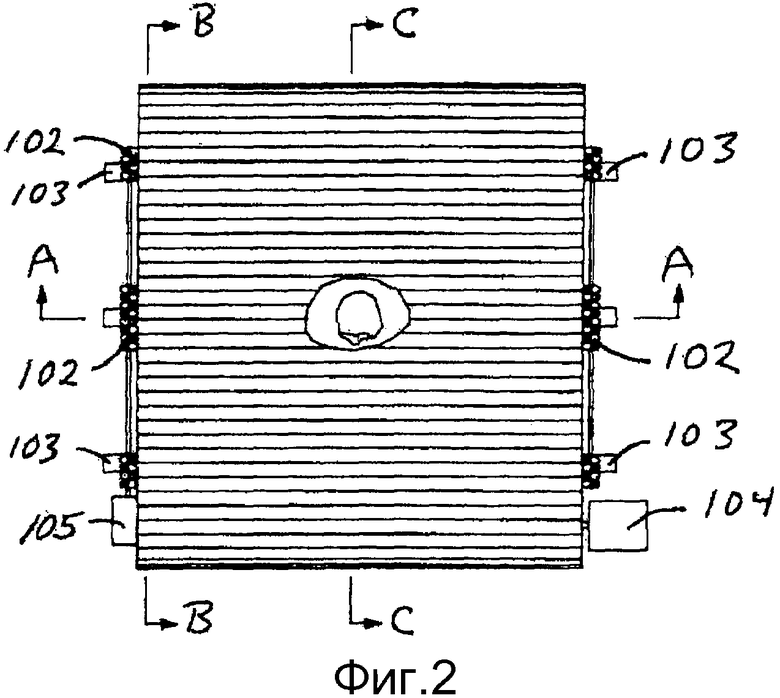
Фиг.2 представляет собой вид сверху беговой дорожки на фиг.1 в соответствии с настоящим изобретением.
Фиг.3 представляет собой разрез беговой дорожки в соответствии с настоящим изобретением, взятый в направлении, параллельном поперечной балке беговой дорожки.
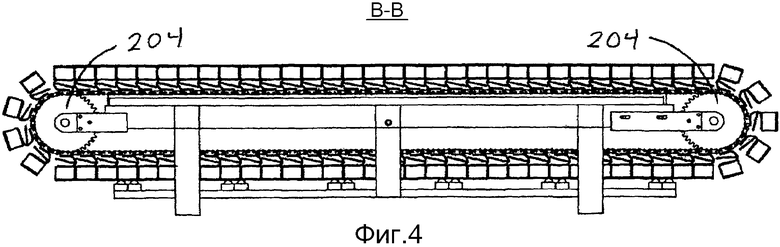
Фиг.4 представляет собой разрез беговой дорожки в соответствии с настоящим изобретением в направлении, ортогональном к направлению разреза на фиг.3, показывающий поперечную балку в месте прикрепления роликовой цепи.
Фиг.5 представляет собой разрез беговой дорожки в соответствии с настоящим изобретением, взятый в том же направлении, что и вид на фиг.4, показывающий поперечные балки в среднем месте.
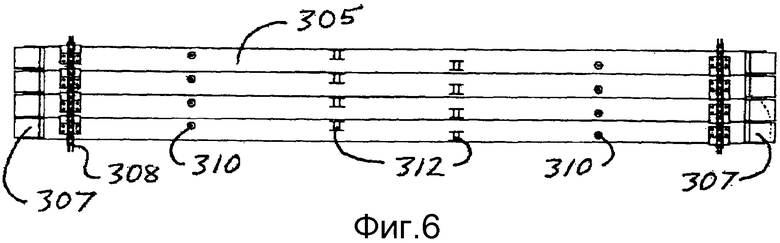
Фиг.6 представляет собой частичный вид снизу беговой дорожки в соответствии с настоящим изобретением, показывающий группу из четырех поперечных балок.
Фиг.7 представляет собой вид сбоку одной поперечной балки, показанной с транспортерной лентой.
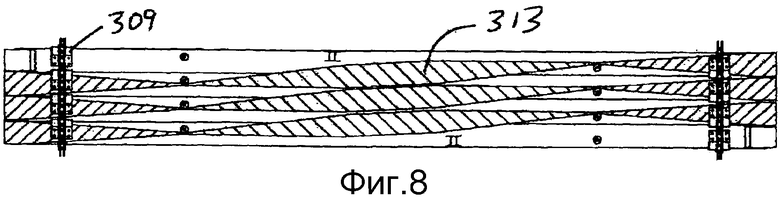
Фиг.8 представляет собой вид снизу четырех поперечных балок, показанных с транспортерной лентой, проходящей от одной поперечной балки к другой.
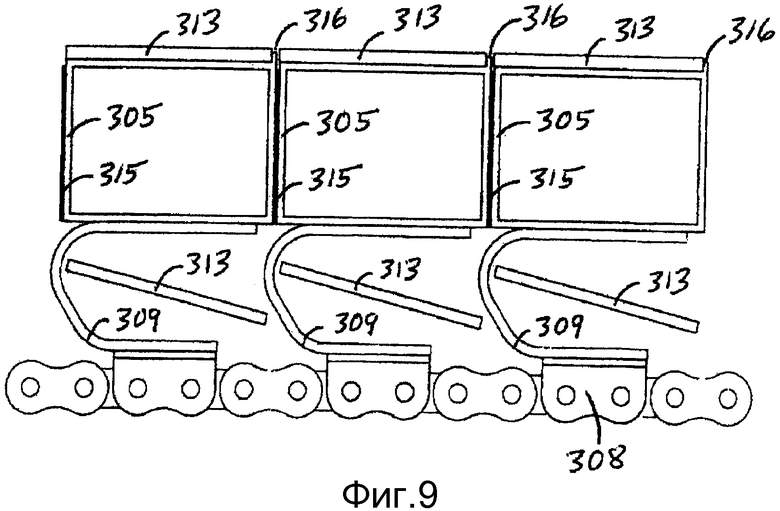
Фиг.9 представляет собой увеличенный вид в разрезе через поперечную балку в месте, показывающем скобу.
Фиг.10 представляет собой вид снизу конца поперечной балки, показывающий направляющий кронштейн с прикрепленными выравнивающими роликами.
Фиг.11 представляет собой разрез конца поперечной балки на фиг.10 рядом с направляющим кронштейном, взятый по линии D-D.
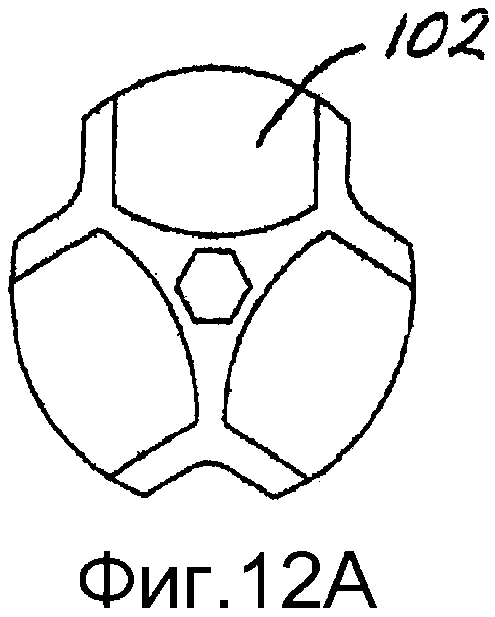
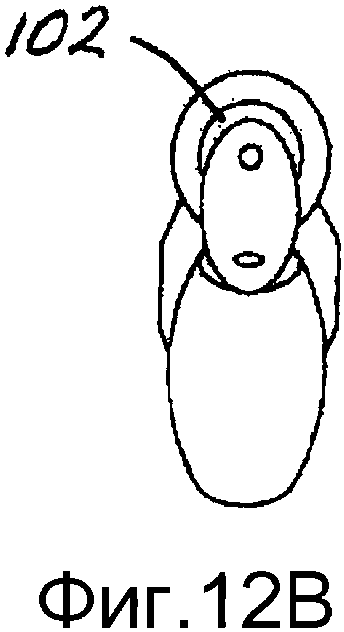
Фиг.12A и 12B представляют собой соответственно вид сбоку и вид спереди всенаправленного колеса.
Фиг.13 представляет собой вид сбоку пластиковой, полученной литьем под давлением методом впрыска поперечной балки, которая может использоваться в беговой дорожке в соответствии с настоящим изобретением.
Фиг.14 представляет собой разрез поперечной балки на фиг.13, взятый по линиям F-F в месте прикрепления цепи.
Фиг.15 представляет собой разрез через поперечную балку на фиг.13, взятый по линиям E-E в центральном месте, показывающий увеличенную глубину I-образной балки.
Фиг.16 представляет собой вид сверху беговой дорожки, использующей кардан для наклона.
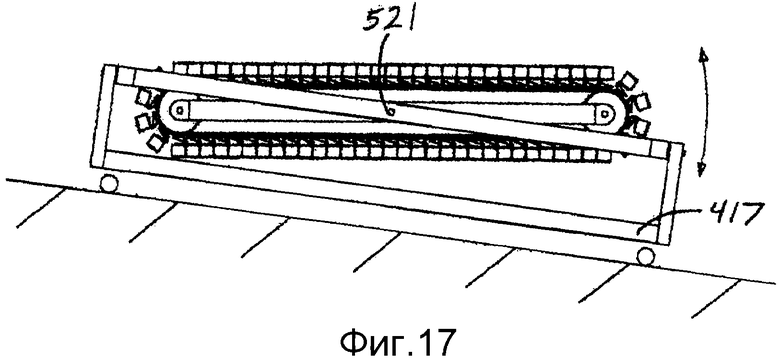
Фиг.17 представляет собой вид спереди карданной беговой дорожки на фиг.16.
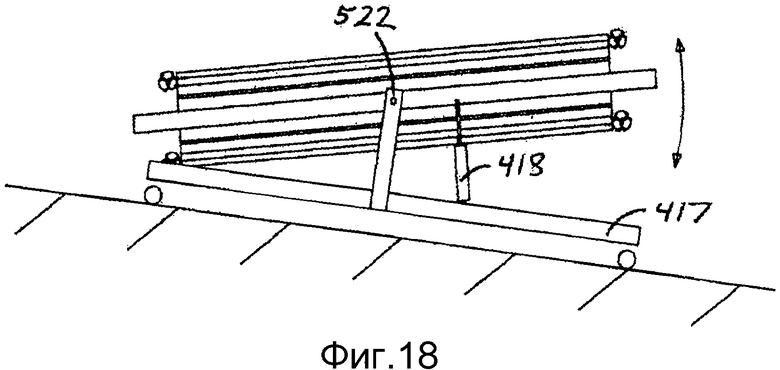
Фиг.18 представляет собой вид сбоку карданной беговой дорожки на фиг.16.
Фиг.19 представляет собой вид спереди беговой дорожки, показывающий прикрепленный интерфейс динамического управления.
Фиг.20 представляет собой вид сбоку беговой дорожки, имеющей интерфейс динамического управления фиг.19.
Фиг.21 представляет собой вид сверху беговой дорожки на фиг.19.
Фиг.22 представляет собой увеличенный вид плавающего соединения обруч-рама интерфейса динамического управления.
Фиг.23 представляет собой схему, показывающую точку прикрепления ролика обруча крепления вертлюжного снаряжения.
Фиг.24A и 24B представляют собой увеличенные виды ножницеобразного плавающего соединения обруч-рама интерфейса динамического управления в растянутом и сжатом состоянии соответственно.
Фиг.25A и 25B представляют собой соответственно виды сверху и сбоку, показывающие узел вертлюжного снаряжения, прикрепленный к пользователю.
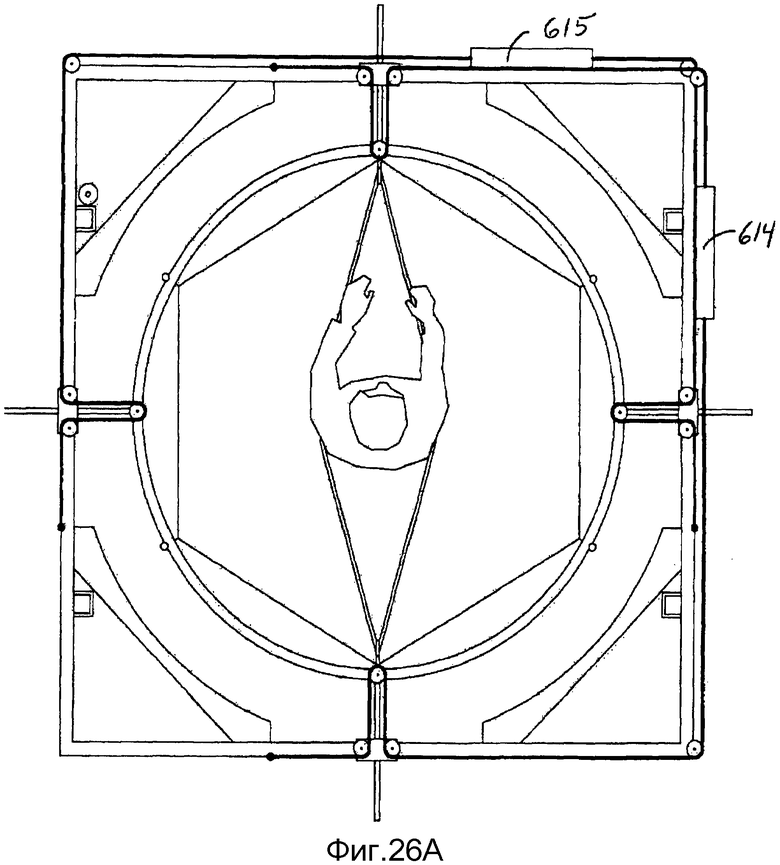
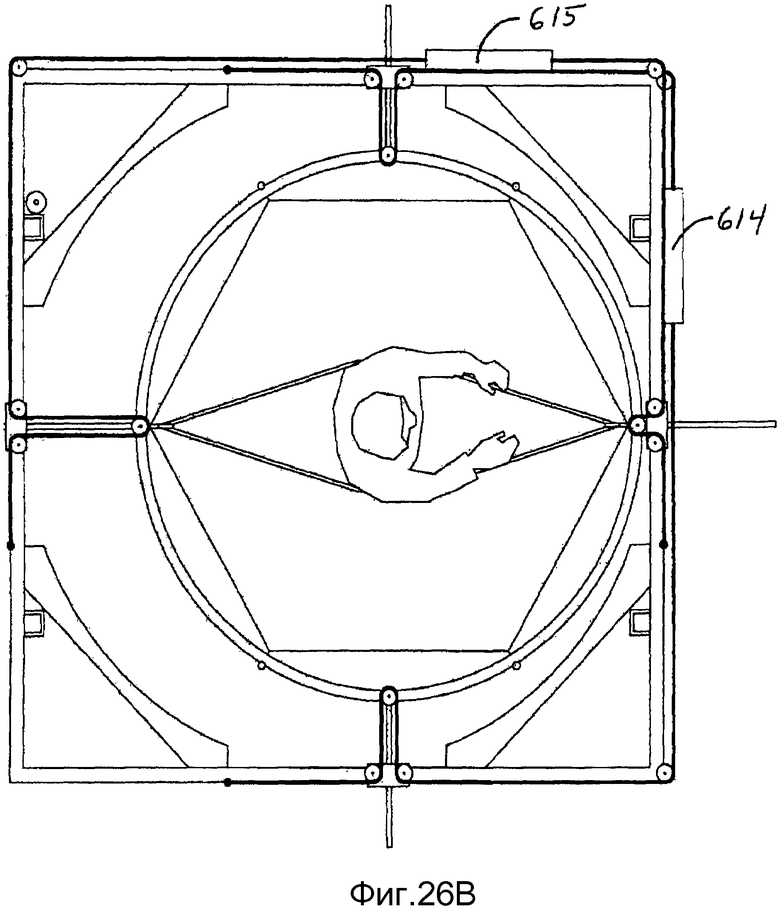
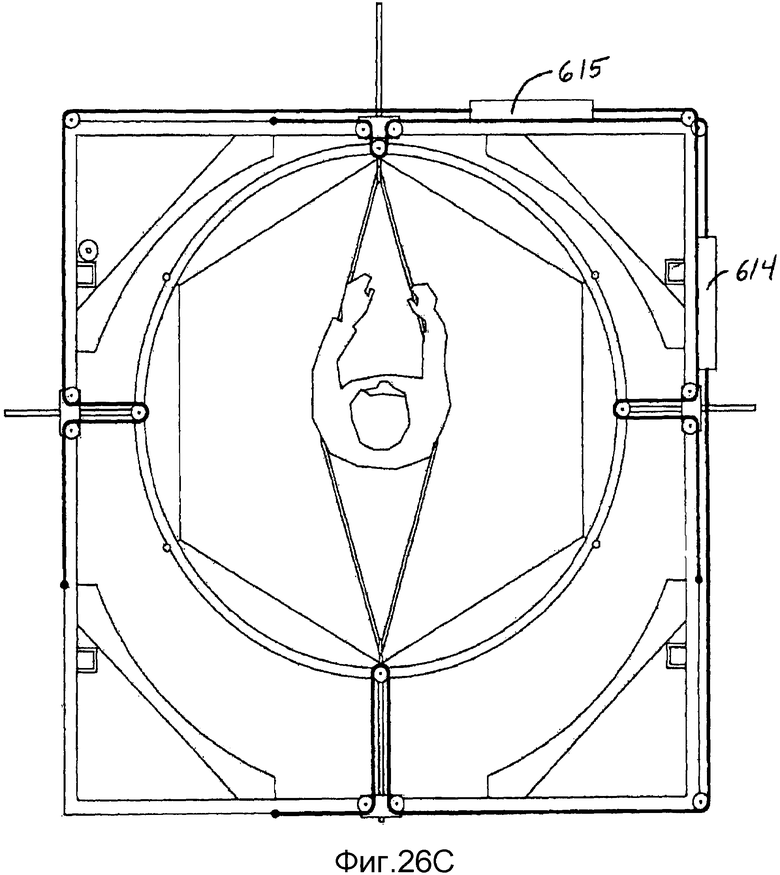
Фиг.26A-26D представляют собой соответственно виды сверху интерфейса динамического управления с недвижущимся пользователем, пользователем, движущимся в направлении X, пользователем, движущимся в направлении Y, и поворачивающим пользователем.
ПОДРОБНОЕ ОПИСАНИЕ
Для средних специалистов в данной области будет понятным, что нижеследующее описание настоящего изобретения является только иллюстративным, а не каким-либо образом ограничивающим. Другие варианты осуществления изобретения легко придут на ум таким специалистам.
Конструкция и работа иллюстративной беговой дорожки настоящего изобретения показаны на различных видах, представленных на фиг.1-7. Беговая дорожка функционирует благодаря монтажу ряда поперечных балок 305 на две роликовые цепи 308, по одной роликовой цепи рядом с каждым концом балки, как показано на фиг.7. Поперечные балки 305 могут быть выполнены из материала, такого как алюминий. Роликовые цепи 308 собраны таким образом, чтобы образовать две параллельные цепи, каждая со звездочкой 204 на каждом конце, при этом подшипники звездочек закреплены на раме 103. Перемещение этих балок на цепном узле обеспечивает возможность перемещения в направлении x. Для перемещения в направлении y используется одна спирально намотанная транспортерная лента 313. Конвейерная лента 313 может быть выполнена из слоев полиэфирных моноволокон с ПВХ покрытием на верхней стороне или эквивалентных материалов. Конвейерная лента 313 оборачивается вокруг роликов 307, размещенных на обоих концах каждой балки. На внешней поверхности каждой балки лента поддерживается в контакте вдоль длины балки посредством балки, использующей незначительную кривизну, показанную с помощью ссылочной позиции 20. Эта кривизна, которая может составлять около 1/2 дюйма, обеспечивает возможность прогибания поперечных балок 305 вследствие веса пользователей без отрыва конвейерной ленты 313 от поверхности вследствие вогнутости.
Поперечные балки 305 могут легко формоваться из термопластичного пластикового материала, такого как найлон 6/6, и могут иметь форму, как показано на различных видах, представленных на фиг.13, 14 и 15. Этот вариант приведет к менее дорогостоящей, более легкой и простой для сборки поперечной балке 305.
Теперь будет дано описание перемещения конвейерной ленты 313 относительно поперечных балок 305. Конвейерная лента 313 продвигается снаружи балки и перемещается по направлению к концевому ролику 7. Затем она продвигается вокруг этого ролика, уходя от него внутрь. Затем лента 313 начинает движение перекручивания, когда она проходит между выравнивающими роликами 318, затем через скобу 309, которая прикрепляется к поперечной балке 305, затем к одной из двух роликовых цепей 308, показанных на фиг.9. Затем она незначительно поворачивается вокруг вертикально смонтированного ролика 310, тем самым незначительно перенаправляя ленту к следующей поперечной балке, как показано на фиг.8. В этом месте лента теперь перекручена на 90 градусов. Затем лента продолжает перекручивание и встречается с конечным роликом 312 текущей балки. Каждая балка имеет два ленточных перехода, осуществляющихся одновременно. Один из роликов 312 предназначен для транспортерной ленты, перемещающейся к поперечной балке спереди текущей поперечной балки, а другой из роликов 312 предназначен для транспортерной ленты, идущей от поперечной балки сзади текущей балки.
Ролик 312 незначительно перенаправляет конвейерную ленту. Ролик 312 позволяет ленте оставаться параллельной относительно поперечной балки 305, но удерживаться приблизительно на той же высоте, что и область взаимодействия между зубьями звездочки и роликовой цепью. Следующий ролик 312, с которым встречается лента, является параллельным последнему, но смонтирован на следующей балке. При встрече с этим роликом лента 313 незначительно перенаправляется обратно вниз. Лента 313 продолжает перекручивание, когда она встречается с другим роликом 310, который позволяет ей поворачиваться параллельно продольной оси новой балки. Средние специалисты в данной области отметят, что конвейерная лента перекрутилась на 180° между двумя роликами 310. Затем она продолжает перекручивание на другие 90°, снова проходя через скобу 309, затем через выравнивающие ролики 318, затем встречается с концевым роликом 307 этой балки. Вид снизу этого узла транспортерных лент показан на фиг.8. Это отчасти спиралеобразное оборачивание транспортерной ленты 313 повторяется для каждой балки. Следовательно, только одна (очень длинная) бесконечная транспортерная лента необходима для обеспечения перемещения в направлении y. Вертикальные ролики 309 используются для незначительного перенаправления конвейерной ленты, обеспечивая возможность ориентирования концевых роликов (307) точно на 90° от длины поперечной балки, чтобы обеспечить возможность плавного перемещения всенаправленных колес.
Когда узел поперечной балки/ленты находится в конце плоской части его пути при перемещении в направлении X и роликовая цепь 308 встречается со звездочкой 204, он затем должен вращаться. Лента 313 способна осуществлять это, так как при перемещении между поперечными балками в месте между парой роликов 312 она находится на таком же радиусе 306, что и роликовая цепь 308, и, следовательно, будет просто поворачивать, когда две поперечные балки, между которыми она проходит, поворачиваются относительно друг друга, как показано на фиг.4 и 5.
Перемещение в направлении X осуществляется посредством приведения в движение оси, соединенной со звездочками 204, с помощью электродвигателя 104 с надлежащими зубчатыми передачами. Перемещение в направлении Y осуществляется посредством всенаправленных колес 102, смонтированных на четырех приводных валах 101, зацепляющихся друг с другом, причем каждое колесо 102 прижимается в конвейерную ленту, перемещающую вокруг концевого ролика 7. Так как каждая поперечная балка 305 имеет ролик 7 на каждом конце, направленные внутрь давления на эти колеса нейтрализуют друг друга, следовательно, величина давления, прикладываемого к каждому колесу, может быть весьма большой, если требуется, без труда достаточной для обеспечения достаточного трения для приведения в движение конвейерной ленты в направлении Y, даже при высоком ускорении. Область взаимодействия концевого ролика/колеса стабилизируется посредством узла роликовой цепи сверху и шариковых перемещающих устройств 311 снизу.
Для дополнительной опоры поперечные балки способны скрепляться штифтами, это может быть осуществлено посредством соединения конического стержня 314a на одной стороне балки и отверстия 314 на другой. Это позволит каждой поперечной балке обеспечить и получить опору от соседних поперечных балок с каждой стороны, таким образом заставляя узел работать скорее как однородная структура, когда пользователь идет по нему.
Каждая поперечная балка также предусмотрена с небольшим фланцем 316, выступающим рядом с транспортерной лентой на одной стороне, как показано на фиг.9. Этот фланец 316 служит для способствования предохранению ленты 313 от схода с поперечной балки.
Для способствования уменьшению шума и вибрации смежные стороны поперечных балок с установочными штифтами могут быть выполнены таким образом, чтобы иметь небольшой зазор между ними. Этот зазор предназначен для обеспечения возможности прикрепления слоя упругого материала 315, такого как резина, как показано на фиг.9.
Всенаправленная беговая дорожка настоящего изобретения может легко монтироваться на кардан 416 или аналогичное устройство и наклоняться в любом направлении, используя линейные исполнительные механизмы 418, как показано на фиг.16, 17 и 18, для имитации возвышенностей и для обеспечения возможности улучшенного устройства управления движением.
Ссылаясь теперь в целом на фиг.19, 20 и 21, иллюстративный интерфейс динамического управления включает в себя плавающую раму 604 на уровне талии со скользящими креплениями к четырем вертикальным трубам 601. Имеется один трос, перемещающийся ко всем четырем из вертикальных труб через посредство шкивов 602. Эта тросовая система заставляет плавающую раму оставаться на уровне относительно всенаправленной беговой дорожки. Величина вертикального усилия, прикладываемого к плавающей раме, может управляться поршнем или исполнительным механизмом 606, соединенным с одной из вертикальных труб 601.
Четыре опорных блока 605 скользят по плавающей раме, обеспечивая средство удерживания обруча с помощью четырех стержней 603 или другого механизма, такого как четыре ножницеобразных соединения 616, как показано на фиг.24A и 24B. Две независимые тросовые системы, состоящие из шкивов 607 и тросов 613, соединяют одну сторону обруча с противоположной стороной. Тросы одной системы поступательно перемещаются во время перемещения в направлении X, и тросы одной системы поступательно перемещаются во время перемещения в направлении Y. Эти системы обеспечивают возможность перемещения обруча в направлении Y без поступательного перемещения троса по X и в направлении X без поступательного перемещения троса по Y. Трос для каждой системы проходит через свой собственный блок управления, 614 для X и 615 для Y, как показано на фиг.26A-26D. Часть тросов, которые фактически проходят через блок управления, могут быть заменены роликовой цепью или другим средством механического взаимодействия с блоком управления. Эти блоки могут содержать регулируемое демпфирующее устройство, которое дает пользователю чувство инерции. Они также легко могут обеспечить дополнительные интерфейсы между пользователем и системой управления скоростью всенаправленной беговой дорожки.
Пользователь надевает снаряжение 618, которое включает две боковые точки 611 поворота в местах бедер. Эти штифты прикрепляют снаряжение к узлу 617 поворотного снаряжения. Поворотное снаряжение прикрепляется к двум точкам прикрепления роликов обруча посредством переднего и заднего вертлюжных соединений 612. Этот узел позволяет пользователю поворачиваться как вперед и назад, так и вбок. Фиг.26A представляет собой вид сверху пользователя в нейтральном положении на беговой дорожке. Она либо не двигается, либо находится в установившемся состоянии движения. Фиг.26B также представляет собой вид сверху и показывает пользователя в движении в направлении X с поступательным перемещением в этом направлении. Фиг.26C представляет собой вид сверху, показывающий пользователя, двигающегося в направлении Y с поступательным перемещением в этом направлении. Узел также способен поворачиваться внутри обруча посредством роликов 610 обруча и троса 609, таким образом позволяя пользователю поворачивать, как показано на фиг.26D.
Благодаря характеру интерфейса динамического управления, когда присоединен пользователь, ее можно заставить испытывать какое-либо требуемое ощущение веса с помощью прикладывания соответствующего усилия посредством вертикального исполнительного механизма 606. Этот исполнительный механизм может представлять собой пневматический или гидравлический поршень, соединенный с полостью, сжимаемой газом. Посредством управления давлением газа кто-либо на Земле мог бы ощущать себя, как будто они были бы на Луне, или кто-либо на Луне или в космическом пространстве мог бы ощущать себя, как если бы они имели такой вес, как они желали.
Для соединения с интерфейсом динамического управления пользователю сначала необходимо надеть снаряжение 616, затем, с опущенным креплением вертлюжного снаряжения, просто войти в него, потянуть его вверх и защелкнуться в боковых точках 611 поворота.
Хотя варианты осуществления и применения настоящего изобретения были показаны и описаны, для специалистов в данной области было бы очевидным, что намного больше модификаций, чем упомянуто выше, являются возможными, не отступая от идей изобретения в настоящем описании. Изобретение, следовательно, не следует ограничивать, за исключением в сущности прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беговая дорожка с адаптивной подстройкой скорости и угла наклона полотна | 2023 |
|
RU2804958C1 |
| УСТРОЙСТВО ДЛЯ ВЗАИМОДЕЙСТВИЯ ПОЛЬЗОВАТЕЛЯ С ВИРТУАЛЬНОЙ РЕАЛЬНОСТЬЮ | 2016 |
|
RU2632758C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ЦЕПНЫМ ПРИВОДОМ (ВАРИАНТЫ) | 1996 |
|
RU2160694C2 |
| Беговой тренажер с интерфейсом виртуальной реальности | 2023 |
|
RU2813000C1 |
| Всенаправленная дорожка для виртуальной реальности | 2022 |
|
RU2784682C1 |
| Всенаправленная беговая дорожка с системой обезвешивания | 2023 |
|
RU2818503C1 |
| Устройство для моделирования физической нагрузки у мелких лабораторных животных | 2024 |
|
RU2833390C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ХОДЬБЫ | 2015 |
|
RU2687774C2 |
| КОНВЕЙЕР ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ | 1996 |
|
RU2172713C2 |
| РОЛИКОВОЕ ФОРМУЮЩЕЕ УСТРОЙСТВО С ТРЕХМЕРНЫМ ГИБОЧНЫМ УЗЛОМ И СПОСОБ | 2010 |
|
RU2544220C2 |



















Беговая дорожка, имеющая узел ленты, позволяет пользователю идти или бежать в любом направлении. Одна спирально намотанная лента на выровненном торе приводится в движение двумя независимыми приводными системами. Приводные системы управляются комбинацией инфракрасных камер и физической системы снаряжения. 8 з.п. ф-лы, 26 ил.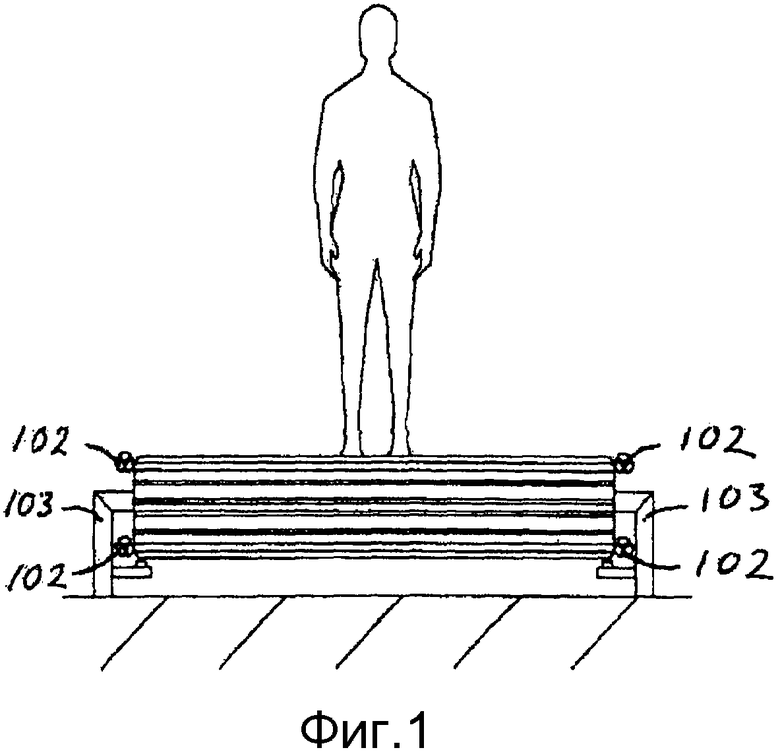
1. Всенаправленная беговая дорожка, содержащая:
раму;
множество поперечных балок, связанных друг с другом для образования непрерывного контура, имеющего, по существу, плоскую верхнюю поверхность, причем каждая из множества поперечных балок имеет внутреннюю поверхность и внешнюю поверхность;
приводной механизм поперечных балок, смонтированный на раме и соединенный с множеством поперечных балок, для приведения в движение непрерывного контура;
единую конвейерную ленту, проходящую по внешней поверхности каждой поперечной балки и проходящую по спирали от первого конца внутренней поверхности каждой поперечной балки ко второму, противоположному первому, концу внутренней поверхности соседней поперечной балки; и
приводной механизм конвейерной ленты, соединенный с конвейерной лентой.
2. Беговая дорожка по п. 1, в которой множество поперечных балок соединено друг с другом посредством установки на первой и второй приводных цепях, при этом первая приводная цепь смонтирована между первой парой цепных колес, а вторая приводная цепь смонтирована между второй парой цепных колес, причем первый конец каждой поперечной балки смонтирован на первой приводной цепи, а второй конец каждой поперечной балки смонтирован на второй приводной цепи, при этом каждое противоположное цепное колесо из первой и второй пары цепных колес смонтировано на общей оси, поддерживаемой посредством рамы оси, соединенной с рамой.
3. Беговая дорожка по п. 1, в которой приводной механизм поперечных балок содержит приводной двигатель, соединенный с одной из общих осей цепных колес.
4. Беговая дорожка по п. 1, в которой каждая поперечная балка имеет отверстие, образованное на одной боковой грани в выбранном положении вдоль ее длины, и стержень, выступающий из второй грани, противоположной первой грани, в выбранном положении, при этом стержень каждой поперечной балки проходит в отверстие соседней поперечной балки.
5. Беговая дорожка по п. 1, в которой приводной механизм конвейерной ленты содержит приводной двигатель ленты, соединенный с одной конвейерной лентой.
6. Беговая дорожка по п. 1, дополнительно содержащая исполнительный механизм наклона, подсоединенный между рамой и рамой оси, для наклона, по существу, плоской верхней поверхности непрерывного контура на угол относительно горизонтальной плоскости.
7. Беговая дорожка по п. 6, в которой рама оси смонтирована на раме в паре противоположных точек поворота.
8. Беговая дорожка по п. 1, дополнительно содержащая снаряжение пользователя, смонтированное на раме.
9. Беговая дорожка по п. 1, дополнительно содержащая:
интерфейс динамического управления, который включает в себя плавающую раму, имеющую скользящие крепления к четырем вертикальным опорам, один трос, перемещающийся ко всем четырем из вертикальных опор с помощью шкивов для побуждения плавающей рамы оставаться на уровне относительно всенаправленной беговой дорожки; и
исполнительный механизм, соединенный с одной из вертикальных опор, для регулирования величины вертикального усилия, прикладываемого к плавающей раме.
| US 20100022358 A1, 28.01.2010 | |||
| US 5385520 A, 31.01.1995 | |||
| US 6409633 B1, 25.06.2002 | |||
| US 6152854 A1, 28.11.2000 | |||
| US 6053848 A1, 25.04.2000 |

