Изобретение относится к устройству для выемки угля в соответствии с ограничительной частью пункта 1 формулы изобретения.
Такое управление выемкой угля известно, например, из DE 10018481 А1 (ТВТ 9905).
В лаве установлено определенное число радиоприемников, последовательно связанных с центральным блоком в вентиляционном штреке (забойный блок управления). Каждый радиоприемник непрерывно получает информацию от датчика породы и направляет эту информацию забойному блоку управления для обработки. В этом блоке определяется, движется ли струговая машина еще в зоне угольного забоя или уже срезает граничные слои вмещающей породы. В зависимости от этого струговая машина должна быть приподнята или опущена. Подъем струговой машины осуществляется за счет опускания кромки желоба, причем струговая машина наклоняется или опрокидывается вокруг опоры скольжения, расположенной в зоне середины ширины желоба. Опускание же струговой машины происходит за счет того, что соседняя с крепью кромка желоба посредством отклоняющего устройства поднимается, в результате чего струговая машина поворачивается вокруг опоры скольжения во встречном направлении.
В основу изобретения была положена задача ускорения управления таким образом, чтобы положение струговой машины можно было корректировать по возможности в процессе выемки угля, но в любом случае во время обратного хода, вызывая подъем или опускание выемочной машины.
Решение этой задачи, достигаемое совокупностью признаков пункта 1 формулы изобретения, основано на том, что скорость управления зависит, в частности, от передаваемого объема данных, но с другой стороны, для оптимального с точки зрения практики эксплуатации управления стругом достаточно даже ограниченного согласно изобретению объема данных. В зоне каждой секции механизированной (щитовой) крепи проводятся предпочтительно только два измерения, по существу на одинаковой высоте.
Для дальнейшего уменьшения передаваемого объема данных и повышения скорости управления служит вариант по пункту 2 формулы изобретения. В этом варианте также достигается повышение надежности, поскольку отпадает необходимость соединения радиоприемников посредством кабеля, прокладываемого вдоль желоба (рештачного става). Блок управления секцией при каждой секции крепи соединяется с одним радиоприемником. Поскольку радиосигнал должен перекрывать лишь короткий участок - на практике не более 3 м, для уверенной и надежной передачи достаточно лишь небольшой мощности сигнала. Обмен принятыми сигналами и их обработка могут осуществляться с помощью шины, которая соединяет блоки управления всех секций крепи между собой и с забойным блоком управления.
В варианте по пункту 3 формулы изобретения для дальнейшего ускорения процессов управления обработка сигналов может происходить в любом блоке управления секцией крепи, предпочтительно в том же блоке управления секцией крепи, который находится ближе всего к соответствующему отклоняющему устройству и поэтому назначен для взаимодействия с ним.
В усовершенствованном исполнении варианта устройства по пункту 3 формулы изобретения характеризующие породу данные для их анализа собираются в соседних блоках управления секциями крепи, в частности в том блоке управления секцией крепи группы, который поставлен в соответствие соответствующему отклоняющему устройству, а затем анализируются на предмет того, преобладают ли в этих характеризующих породу сигналах сигналы "порода" или "уголь". Для этого каждый блок управления секцией крепи снабжен собственными вычислительным блоком или блоком управления (контроллером), что позволяет с помощью программы, предпочтительно записанной в каждом блоке управления секцией крепи, установить, срезает ли струговая машина в данный момент в зоне только что пройденных секций крепи преимущественно породу или уголь. За счет обработки собранных на нескольких соседних секциях крепи характеризующих породу данных посредством программы, хранящейся в соответствующем блоке управления секцией крепи или в забойном блоке управления, или вручную принимается решение о том, на какой участке по длине необходимо изменить положение струговой машины путем ее подъема или опускания.
В альтернативном или дополнительном варианте осуществления изобретения, охарактеризованном в пункте 4 формулы изобретения, предварительная обработка измеренных характеризующих породу сигналов происходит в перемещаемом вместе со струговой машиной микропроцессоре. Эта предварительная обработка может происходить таким образом, чтобы с помощью соответствующей датчику породы радиостанции передавать только простые, "черно-белые", сигналы "уголь" или "порода".
Чтобы система управления могла решить, на какой длине распознанной породы необходимо изменить положение струга, устройство по пункту 5 оборудовано инклинометрами (креномерами). Для передачи всех измерительных сигналов по проложенной вдоль конвейера шине эти инклинометры могут быть соединены с забойным управляющим устройством.
Вариант устройства по пункту 6 служит для уменьшения проходящего через забойный блок управления объема данных.
В соответствии с вариантом по пункту 7 для сокращения затрат на дополнительное кабельное соединение радиоприемников сигналов наклона радиоприемники выделяются именно тому блоку управления секцией крепи, который находится ближе всего к инклинометру. Как правило, это тот блок управления секцией крепи, который в варианте по пунктам 1-3 формулы изобретения поставлен в пространственное и функциональное соответствие отклоняющему устройству.
При этом существует еще одна проблема, состоящая в том, что для электропитания инклинометра и соответствующего передатчика требуется кабельное соединение. Этого можно избежать в варианте устройства по пункту 8 формулы изобретения. При этом вариант по пункту 9 формулы изобретения обеспечивает длительные срок службы и срок сохранения аккумуляторной батареей заряда. В этом отношении в варианте по пункту 9 используется тот факт, что выполнение инклинометром функций измерения и передачи данных необходимо в течение весьма короткого времени (например 5-10 секунд), пока струговая машина движется мимо определенного числа секций крепи, соотнесенных с инклинометром, чтобы передать характеризующие породу данные, например, в двух точках измерений на каждую секцию крепи. По этой причине включение питания аккумуляторной батареи инклинометра и размещенного на нем датчика осуществляется движущимся мимо стругом, например за счет кодированного особым образом радиосигнала струговой машины или ее датчика. Отключение питания аккумуляторной батареи может происходить по истечении заданного промежутка времени.
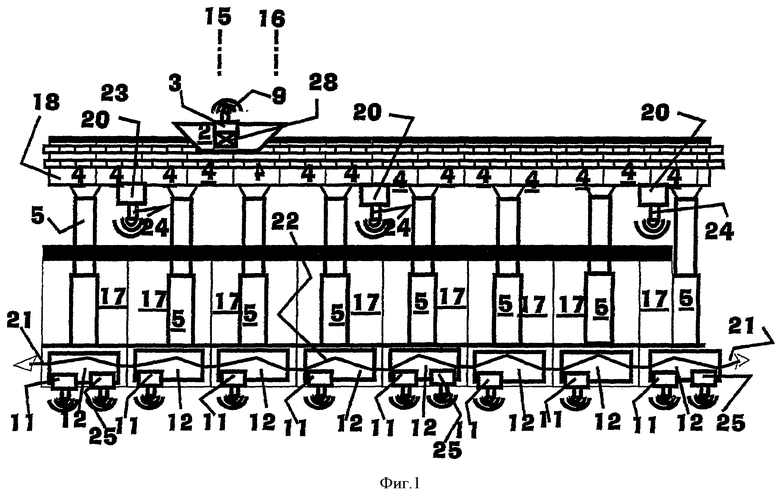
На фиг.1 в качестве примера схематично изображен вид лавы в плане.
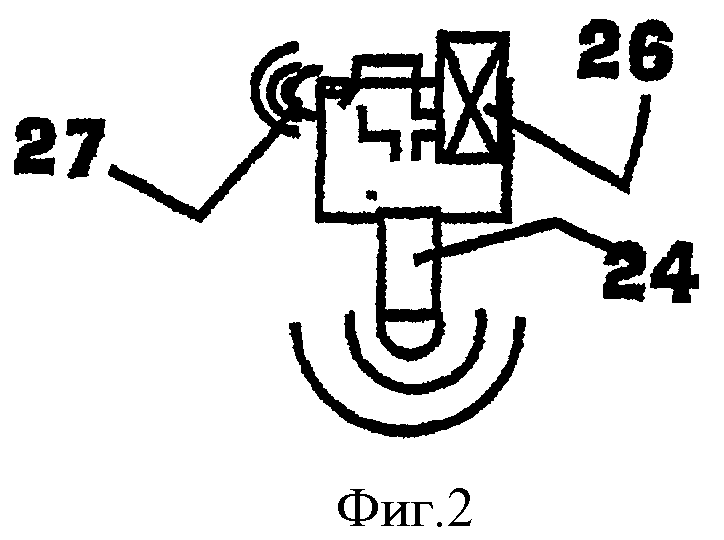
На фиг.2 изображен местный вид с инклинометром.
Струговая машина 2 совершает в лаве (например, длиной 300 м) вдоль линии очистного, или угольного забоя (не показан) возвратно-поступательные перемещения с большой скоростью (например, 3 м/с) с помощью тяговой цепи 23. При этом струговая машина 2 направленно движется мимо желоба (рештачного става) 18, состоящего из секций (рештаков) 4. В нем отбитый уголь транспортируется к концам лавы. Лава перекрывается и поддерживается вверху рядом секций механизированной крепи (щитами), которые установлены вплотную друг к другу на обращенной от угольного забоя стороне желоба и помимо своей функции поддержания породы выполняют также функцию поддержания желоба в направлении угольного забоя и подвижки секций желоба по мере очистки угольного забоя. Каждая секция крепи содержит отклоняющее устройство 5, описанное ниже.
Каждая секция крепи содержит также блок управления секцией (блок 12 управления) для управления осуществляемыми отдельными секциями крепи функциями, в частности разгрузкой, передвижкой и распором крепи. Секции крепи лавы соединены между собой шиной, по которой команды, измерительные и функциональные сигналы могут передаваться на каждый из блоков управления секциями, а по соединительной линии 21 - и на забойный блок управления и/или на центральный блок управления.
Струговая машина 2 оборудована датчиком 3 породы и соответствующим микропроцессором 28. Такие датчики 3 породы известны и поставляются, например, фирмой TEC5-AG, находящейся в г.Оберурзеле. Их задача - непрерывно анализировать породу или уголь, появляющуюся/появляющийся в зоне резания струговой машины на фронте очистных работ разрабатываемого пласта и определять, врезаются ли струги струговой машины в пласт (уголь) или выходят из него вверх или вниз (порода). В зависимости от этого желоб 18, или его соседние секции, поворачиваются вокруг средней или расположенной со стороны угольного забоя опорной лыжи (не показана) за счет раздвижения или уборки отклоняющего устройства 5, выполненного в виде силового цилиндра (отклоняющий цилиндр) в плоскости, перпендикулярной направлению перемещения струга (направлению тяговой цепи 23) таким образом, чтобы при этом струги струговой машины устанавливались на угольном забое ниже (опускались), если датчик породы установит, что пласт падает в направлении движения струговой машины, или выше (поднимались), если датчик породы установит, что пласт поднимается в направлении движения струговой машины. Отклоняющие цилиндры 5 установлены на каждой секции крепи. В зависимости от конкретных условий может быть достаточным предусмотреть отклоняющее устройство/отклоняющий цилиндр на каждой шестой-двенадцатой секции крепи.
Следует заметить, что наклоны пласта в определенной мере происходят также за счет регулирования резцов и, в частности, почвенного резца, так что опускание или подъем за счет поворота секций желоба следует использовать только в чрезвычайных геологических условиях.
Особое значение для производительности установки имеет то, чтобы соответствующие управляющие команды на поворот секций желоба передавались в блок управления, в частности забойный и центральный блоки управления, максимально быстро с тем, чтобы корректировать положение струговых машин по высоте за счет опускания или подъема по возможности при проходе струга вперед, и самое позднее при обратном ходе. В известных установках это не удается сделать из-за потока данных, которым нельзя достаточно быстро управлять при обычно располагаемой производительности компьютера. Поэтому изобретение предусматривает, что измерение посредством датчика породы производится не непрерывно, а время от времени - предпочтительно при прохождении струговых машин мимо секции 17 крепи (около 1,5 м) и только дважды в точках 15, 16 измерений. Измерение осуществляется на участках по существу одинаковой высоты. Оказалось, что благодаря этому возможно достаточно точное распознавание породы с целью управления стругами, которое, с другой стороны, имеет то преимущество, что подъем или опускание стругов может происходить в кратчайшее время, благодаря чему, с одной стороны, не срезается вмещающая порода, а с другой стороны, всегда удаляется максимально возможный слой угля. При этом учитывают следующие обстоятельства:
- настройка и регулирование положения струга не могут осуществляться сколь угодно быстро ввиду высоких инерционных масс и усилий;
- при скорости струга, например, 3 м/с лава длиной 300 м проходится в прямом и обратном направлениях менее чем за 3 мин;
- за это короткое время вряд ли удастся предпринять более четырех корректировок положения струга.
Эти корректировки производятся на основе анализа и, в частности, вычисления среднего значения данных измерений, которые выдаются между двумя или более корректировками положения струга.
Для ускорения формирования обрабатываемого измерительного сигнала датчик породы оснащен также микропроцессором 28, установленным на струговой машине. За счет этого микропроцессора первый анализ данных от датчика породы выполняется с таким расчетом, чтобы выходной сигнал, передаваемый им посредством радиопередатчика 9, можно было понять и использовать без дополнительной отнимающей время обработки, и чтобы такой сигнал в лучшем случае содержал однозначную информацию: "порода" или "уголь".
Для дальнейшего ускорения передачи и обработки характеризующих породу данных датчик 3 породы, как уже сказано, оснащен радиопередатчиком 9, который передает характеризующие породу данные, возможно после и в виде описанной обработки микропроцессором 28, на один из радиоприемников 11, поставленных в соответствие блоку управления каждой секции крепи. Следовательно, радиосвязь ограничена относительно небольшими и однозначными объемами данных и близкой областью, которая никогда не превышает 3 м, поскольку между передатчиком 9 и одним из радиоприемников 11 имеется лишь очень короткий промежуток. Переданные данные направляются принимающей системой управления крепью по шине 22 на забойный и центральный блоки управления. Имеющейся там большой производительности компьютера достаточно, чтобы быстро обработать принятые данные и с помощью сигнала о том, имеется ли на нижнем угольном забое уголь или порода, решить, следует ли согласовать положение конвейера/положение секций желоба за счет опускания или подъема на одном участке длины лавы или на всей ее длине.
Для принятия этого решения и, в частности, для автоматизации этого решения и перемещения с целью автоматического регулирования на забойный и центральный блоки управления подаются также сигналы положения желоба или его секций. Для этого на желобе закреплены несколько инклинометров 20, каждый из которых относится к одной группе соседних секций желоба. Если отклоняющее устройство сопряжено не с каждой секцией крепи, а например, только с каждой шестой, то инклинометр расположен на желобе в зоне воздействия соответствующего отклоняющего устройства или на секции желоба, на которую воздействует отклоняющее устройство. Инклинометр охватывает одну группу секций желоба. Такая группа включает в себя в данном случае пять или шесть соседних секций. Каждый инклинометр 20 снабжен радиопередатчиком 24. Этот передатчик выдает сигнал, характеризующий наклон желоба, на радиоприемник 25, соединенный с блоком управления 17 той секции крепи, которая ближе всего находится напротив инклинометра 20. На чертеже показаны специальные радиоприемники 25. Вместе с тем, прием данных о наклоне также может осуществляться уже описанным радиоприемником 11, если данные, характеризующие породу и наклон секции желоба, передаются с помощью разного кодирования, что позволяет принимающему данные блоку управления крепью решить, идет ли речь о данных, характеризующих породу, или о данных, характеризующих наклон секции желоба. Данные о наклоне передаются принимающим блоком 12 управления крепью по шине 22 и соединительной линии 21 на забойный и центральный блоки управления.
Следует упомянуть, что не показанные на чертеже датчики положения, каждый из которых поставлен в соответствие каждой секции крепи, фиксирует наличие струга и сообщает об этом через соответствующий блок управления крепью забойному и центральному блокам управления. Возможны и другие виды определения положения, описанные, например, в DE 19982113.5-24.
Электрическая энергия для передачи радиосигналов подается к отдельным инклинометрам через размещенную в каждом из них аккумуляторную батарею, или аккумулятор 26. Для экономии энергии каждый инклинометр содержит датчик 27 (например, транспондер), который определяет наличие струговой машины и в зависимости от ее приближения включает электропитание, а при ее удалении выключает. Таким образом, измерения можно выполнять в актуальных фазах движения струга, не используя мешающих в подземных выработках подводящих линий к инклинометрам и без сбоев.
На фиг.2 в увеличенном виде изображен один из инклинометров 20. Каждый из них может снабжаться током через батарею/аккумулятор 26 и т.п. Инклинометр содержит датчик 27, например транспондер, который при приближении струговой машины замыкает выключатель для электропитания радиопередатчика 24, а после прохождения мимо в зависимости от удаления или же, например, в зависимости от времени снова размыкает его. За счет этого можно сократить потребление энергии настолько, что инклинометр может эксплуатироваться не только без подводящего провода, но и длительное время без обслуживания.
Изобретение относится к горной промышленности, а именно к подземной разработке угольных месторождений угледобывающими комплексами и устройствами для выемки угля. Техническим результатом является возможность быстрой корректировки положения струговой машины в процессе выемки угля, вызывающей подъем или опускание струга. Устройство для выемки угля в лаве подземной горной выработки состоит из: множества секций механизированной крепи, установленных рядом друг с другом по длине лавы между штреками; струговой машины; желоба и расположенного с возможностью движения в нем конвейера, которые идут по длине лавы между выемочной машиной и секциями крепи; нескольких отклоняющих устройств и управляющего устройства. Струговая машина установлена с возможностью перемещения вдоль линии очистного забоя и оборудована датчиком для распознавания пород, который выполнен с возможностью передачи по радио данных распознанной породы в устройство управления крепью посредством установленного на струге передатчика и установленных вдоль лавы радиоприемников. Каждому отклоняющему устройству поставлена в соответствие группа соседних секций крепи и секций желоба. Отклоняющее устройство соединено с блоком управления одной из секций крепи соответствующей группы, и в зависимости от данных распознанной породы обеспечивает возможность подъема секций желоба соответствующей группы, сопровождающегося опусканием инструментов струговой машины, и опускания секций желоба, сопровождающегося подъемом инструментов струговой машины. Управляющее устройство содержит: забойный блок управления, расположенный в конце лавы для управления функциями секций крепи в отношении разгрузки, передвижки и распора крепи; блоки управления секциями, каждый из которых поставлен в пространственное и функциональное соответствие соответствующей секции крепи для выполнения и дальнейшей передачи команд от забойного блока управления; и шину, соединяющую, предпочтительно последовательно, забойный блок управления и блоки управления секциями крепи. Причем датчик породы при движении мимо каждой секции крепи выполнен с возможностью выдачи измерительного сигнала, характеризующего распознанную породу, только для нескольких, предпочтительно не более двух, точек измерений. Измерительные сигналы, полученные в соседних точках измерений, подвергаются анализу на предмет преобладания породы или угля. В зависимости от результатов анализа вырабатывается сигнал отклонения, выдаваемый на общее для всех точек измерений отклоняющее устройство, а именно на отклонение секций желоба, вызывающее подъем инструментов струговой машины, если в проанализированных точках измерений результаты анализа показывают преобладание породы, и на отклонение секций желоба, вызывающее опускание инструментов струговой машины, если в проанализированных точках измерений результаты анализа показывают преобладание угля. 8 з.п. ф-лы; 2 ил.
1. Устройство для выемки угля в лаве подземной горной выработки, включающее в себя
множество секций (17) механизированной крепи, установленных рядом друг с другом по длине лавы между штреками,
струговую машину (2), установленную с возможностью перемещения вдоль линии очистного забоя и оборудованную датчиком (3) для распознавания пород, который выполнен с возможностью передачи по радио данных распознанной породы в устройство (12) управления крепью посредством установленного на струге передатчика (радиопередатчик 9) и установленных вдоль лавы радиоприемников (11),
желоб (18) и расположенный с возможностью движения в нем конвейер, проходящие по длине лавы между выемочной машиной и секциями крепи,
несколько отклоняющих устройств (5), причем каждому отклоняющему устройству поставлена в соответствие группа соседних секций крепи и секций желоба, отклоняющее устройство соединено с блоком (12) управления одной из секций крепи соответствующей группы, и в зависимости от данных распознанной породы обеспечивает возможность подъема секций (4) желоба соответствующей группы, сопровождающегося опусканием инструментов струговой машины, и опускания секций желоба, сопровождающегося подъемом инструментов струговой машины,
управляющее устройство, содержащее забойный блок управления (связь 21), расположенный в конце лавы для управления функциями секций крепи в отношении разгрузки, передвижки и распора крепи, блоки (12) управления секциями, каждый из которых поставлен в пространственное и функциональное соответствие соответствующей секции (17) крепи для выполнения и дальнейшей передачи команд от забойного блока управления, и шину, соединяющую предпочтительно последовательно забойный блок управления и блоки управления секциями крепи, отличающееся тем, что
датчик (3) породы при движении мимо каждой секции (17) крепи выполнен с возможностью выдачи измерительного сигнала, характеризующего распознанную породу, (характеризующий породу сигнал) только для нескольких, предпочтительно не более двух точек измерений,
измерительные сигналы, полученные в соседних точках измерений, подвергаются анализу на предмет преобладания породы или угля, и в зависимости от результатов анализа вырабатывается сигнал отклонения, выдаваемый на общее для всех точек измерений отклоняющее устройство, а именно на отклонение секций желоба, вызывающее подъем инструментов струговой машины, если в проанализированных точках измерений результаты анализа показывают преобладание породы, и на отклонение секций желоба, вызывающее опускание инструментов струговой машины, если в проанализированных точках измерений результаты анализа показывают преобладание угля.
2. Устройство по п.1, отличающееся тем, что каждая секция (17) крепи или блок (12) управления ею оборудован(а) радиоприемником (11), а струговая машина - радиопередатчиком (24) для передачи по радио характеризующих породу сигналов на ближайший радиоприемник, причем с помощью устройства измерения положения струга, связанного с устройством управления крепью, характеризующие породу сигналы соотносятся с ближайшей к струговой машине секцией крепи.
3. Устройство по п.1, отличающееся тем, что в каждой группе секций (17) крепи, отнесенных к одному отклоняющему устройству (5), по меньшей мере, один, а предпочтительно - каждый, блок (12) управления секцией крепи оборудован микропроцессором, выполненным с возможностью выработки сигналов отклонения для соотнесенного с этой группой отклоняющего устройства, и программной памятью, в которой записана программа обработки характеризующих породу сигналов и их преобразования в сигналы отклонения для соотнесенного с группой отклоняющего устройства.
4. Устройство по п.1, отличающееся тем, что струговая машина (2) оборудована микропроцессором (28), в который заложена программа обработки измеренных характеризующих породу сигналов и их преобразования в передаваемые радиопередатчиками (24) сигналы для различения угля и породы.
5. Устройство по п.1, отличающееся тем, что каждому из отклоняющих устройств поставлен в соответствие инклинометр (20), измеряемое которым текущее значение наклона желоба или его секций (4) в их поперечном направлении подается в устройство управления крепью в качестве фактического значения для согласования с сигналом отклонения, выработанным в результате анализа измерительных сигналов.
6. Устройство по п.5, отличающееся тем, что каждый инклинометр (20) оборудован радиопередатчиком (24) для передачи по радио сигналов наклона на неподвижные радиоприемники (25), расположенные вдоль лавы на расстоянии друг от друга.
7. Устройство по п.6, отличающееся тем, что для передачи по радио сигналов наклона на неподвижные радиоприемники, расположенные вдоль лавы на расстоянии друг от друга, каждая из соответствующих инклинометру секций (17) крепи или блок (12) управления ею оборудован(а) радиоприемником (25).
8. Устройство по п.7, отличающееся тем, что каждый инклинометр снабжен аккумуляторной батареей (26) для электропитания инклинометра и связанных с ним функциональных элементов, в частности соответствующего радиопередатчика.
9. Устройство по п.8, отличающееся тем, что каждый инклинометр оборудован схемой включения и выключения электропитания от аккумуляторной батареи, причем включение происходит от датчика (27) для определения приближения движущейся мимо струговой машины или по радиосигналу, поданному струговой машиной посредством установленного на ней передатчика, а выключение происходит соответствующим образом или по истечении некоторого времени.

