Изобретение относится к области энергомашиностроения, в частности к электромеханическим преобразователям энергии на магнитных подшипниках.
Известен механизм с магнитным подвесом ротора (а.с. СССР №1569932, Н02K 7/09, 1990 г.), в котором каждый канал системы содержит датчик положения ротора, пропорционально-интегрально-дифференциальный регулятор, силовой преобразователь и два электромагнита.
Недостатком данной конструкции является сложность ее технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора, которые необходимо устанавливать внутри корпуса электромеханического преобразователя энергии.
Известна конструкция системы управления магнитным подшипником (патент РФ № 2181922 С2, Н02Р 6/16, Н02K 7/09, Н02K 29/06,2002.04.27), каждый канал управления которой содержит датчик положения ротора, силовой преобразователь, два электромагнита, причем обмотки электромагнитов подключены к силовому преобразователю, каждый канал которого снабжен интегральным регулятором и форсирующим регулятором второго порядка, причем выход интегрального регулятора соединен с прямым входом форсирующего регулятора второго порядка, выход которого соединен с входом силового преобразователя, а выход датчика положения ротора соединен с инверсными входами обоих регуляторов.
Недостатком данной конструкции является сложность ее технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора, которые необходимо устанавливать внутри корпуса электромеханического преобразователя энергии.
Известна конструкция магнитного подшипника(патент РФ 2246644 С1, F16C 32/04, 2005.02.20), в которой модуль управления содержит формирователь вектора радиального перемещения ротора, соединенный выходом через блок динамической обработки сигнала радиального отклонения со входом формирователя управляющих токов в обмотках управления радиальной опоры, который выходами подключен ко входам соответствующих усилителей мощности канала стабилизации радиального положения ротора, выходы которых являются первыми управляющими выходами модуля управления, блок контроля процесса управления, выполненный с возможностью передачи управляющей информации в систему автоматического управления машины, выпрямитель напряжения выходами соединен через емкостный фильтр со входами регулятора напряжения и источника вторичного электропитания, выполненного с возможностью подключения к выводам электропитания всех блоков модуля управления, причем один из выходов емкостного фильтра и выход регулятора напряжения являются третьими управляющими выходами модуля управления, при этом входы формирователя вектора радиального перемещения ротора являются первыми информационными входами модуля управления, а формирователь управляющих токов в обмотках управления радиальной опоры выполнен с возможностью реализации векторной стабилизации ротора по осям в радиальных направлениях.
Недостатком данной конструкции также является сложность ее технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора, которые необходимо устанавливать внутри корпуса электромеханического преобразователя энергии.
Наиболее близкой к предлагаемой конструкции и способу является способ управления неустойчивостью в гидродинамических подшипниках (патент РФ №2399803, F16C 17/02, 08.06.2005), по которому управление неустойчивостью гидродинамических подшипников, включающих гидродинамические подшипники, используемые в узлах высокоскоростных роторов или валов, включает использование магнитного подшипника в комбинации с гидродинамическим подшипником, причем гидродинамический подшипник используют в качестве подшипника, воспринимающего основную нагрузку, а магнитный подшипник используют в качестве средства управления неустойчивостью в гидродинамическом подшипнике.
Недостатком такой конструкции является наличие смазки в гидродинамическом подшипнике, которая ограничивает применение данной системы в агрессивных средах, а также сложность ее технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора, которые необходимо устанавливать внутри корпуса электромеханического преобразователя энергии.
Задача изобретения - повышение точности и надежности управления магнитным подшипником.
Техническим результатом является контроль и управление положением ротора электромеханического преобразователя энергии в магнитном подшипнике посредством датчиков, установленных на внешней поверхности корпуса.
Указанный результат достигается тем, что в способе, управления положением ротора в магнитных подшипниках, заключающиеся в получении сигнала с датчика, электрически соединенного с пропорционально-интегрально-дифференциальным регулятором и силовым преобразователем, согласно изобретению, управление положением ротора осуществляют по напряженности внешнего магнитного поля магнитных подшипников на постоянных магнитах, использующихся в качестве основных опорных подшипников, информация об изменении которой поступает в пропорционально-интегрально-дифференциальный регулятор и силовой преобразователь, которые регулируют напряжение на двух электромагнитах, посредством которых управляют неустойчивостью ротора.
Кроме того указанный результат достигается тем, что в устройстве управления магнитным подшипником, содержащем магнитные подшипники на постоянных магнитах, пропорционально-интегрально-дифференциальный регулятор, силовой преобразователь и два электромагнита, согласно изобретению,датчики положения ротора выполнены в виде датчиков внешнего магнитного поля, установленных на внешней поверхности корпуса.
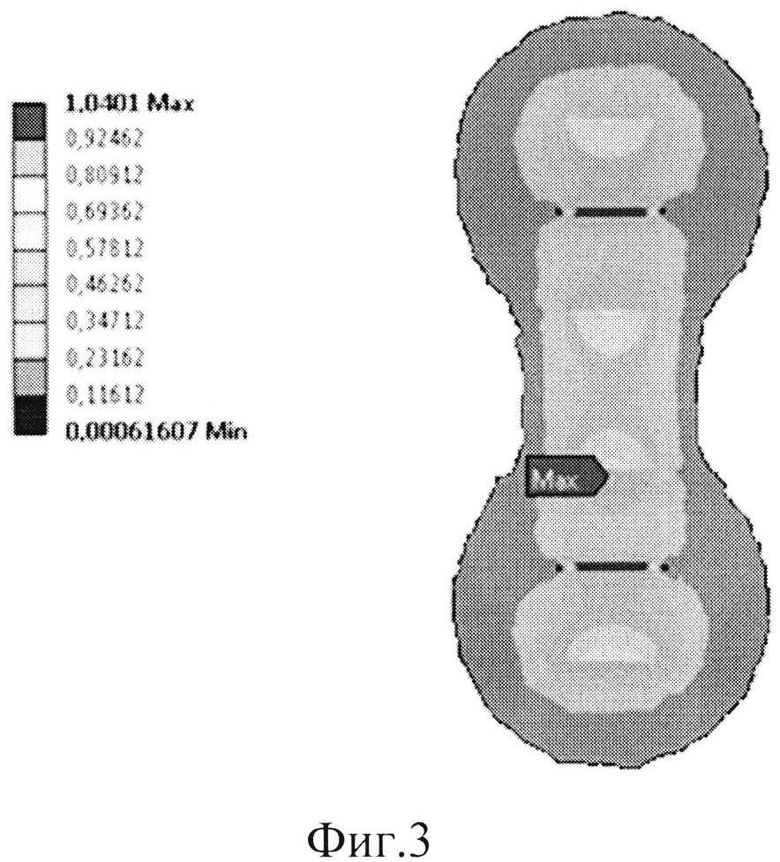
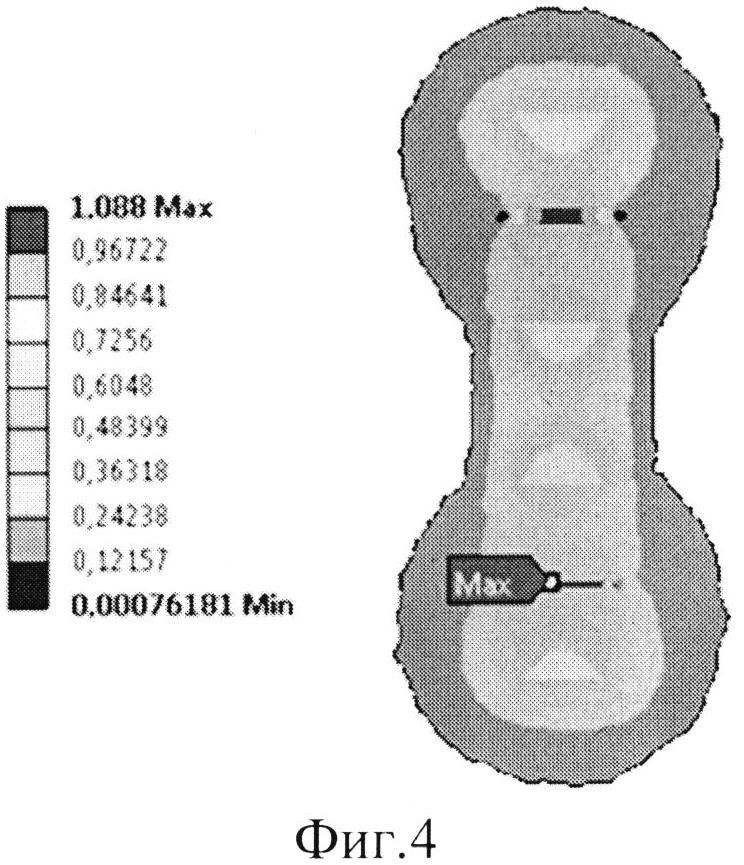
Существо изобретения поясняется чертежами. На фигуре 1 изображено устройство управления положением ротора в магнитных подшипниках. На фигуре 2 изображен способ установки датчика внешнего магнитного поля на внешней поверхности корпуса электромеханического преобразователя энергии. На фигуре 3 изображена картина внешнего магнитного поля магнитного подшипника при отсутствии эксцентриситета. На фигуре 4 изображена картина внешнего магнитного поля магнитного подшипника при эксцентриситете 30%.
Предложенное устройство содержит (фиг.1) корпус 1, в котором установлен датчик внешнего магнитного поля 2, электрически соединенный с силовым преобразователем 3, и магнитные подшипники на постоянных магнитах, которые представляют собой внешний 4 и внутренний 5 кольцевыепостоянные магниты, причем внешний магнит жестко закреплена корпусе, а внутренний - на валу 6, два электромагнита 7, электрически соединенные с силовым преобразователем 3 и пропорционально-интегрально-дифференциальным регулятором 8. Причем датчик внешнего магнитного поля установлен на внешней поверхности корпуса (фиг.2).
Устройство управления положением ротора в магнитных подшипникахработает следующим образом. Внешний и внутренний кольцевые постоянные магниты магнитного подшипника на постоянных магнитахпри вращении вала под действием центробежной силы смещаются друг относительно друга, тем самым возникает эксцентриситет, который с одной стороны уменьшает зазор между внешним и внутренним кольцом, а с другой стороны увеличивает. При этом изменяется значение магнитной индукции, а следовательно, и напряженности внешнего магнитного поля, (фиг.3), (фиг.4). Данное изменение напряженности внешнего магнитного поля магнитного подшипника фиксируется датчиком внешнего магнитного поля, в качестве которого может выступать, например, датчик Холла.
Ввиду того, что датчик внешнего магнитного поля установлен на внешней поверхности корпуса, повышается надежность управления положением ротора в магнитном подшипнике.
Далее сигнал от датчика передается на силовой преобразователь, который посредством математических вычислений в пропорционально-интегрально-дифференциальным регуляторе либо усиливает, либо снижает напряжение на электромагнитах.
Пример конкретной реализации способа.
При смещении ротора на 30% от номинального под действием центробежных сил, например, в высокоскоростном шпиндельном узле шлифовальной группы на магнитных подшипниках, возникает механическая нестабильность и колебания ротора и, как следствие, нарушение требований к обрабатываемой поверхности. Напряженность внешнего магнитного поля магнитных подшипников при этом изменяется с 166340 А/м до 166270 А/м. Датчик Холла фиксирует это изменение и увеличивает посредством силового преобразователя и пропорционально-интегрально-дифференциального регулятора, изготовленных,например, на микросхеме КР 140 УД 708, транзисторах КТ 829, КТ 315 Г, КТ 852, напряжение на электромагнитах на 50%. Как следствие, сила притяжения электромагнитов увеличивается также в два раза, и ротор высокоскоростного шпиндельного узла шлифовальной группы, под действием силы притяжения электромагнитов, возвращается в исходное номинальное положение. Шпиндельный узел продолжает эксплуатироваться в стабильном состоянии, и поверхность обрабатывается в соответствии с необходимыми требованиями.
Таким образом, осуществляется управление положением ротора в магнитных подшипниках.
Итак, заявляемое изобретение позволяет повысить точность и надежность управления магнитным подшипником.
В результате устройство управления положением ротора в магнитных подшипниках позволяет осуществить контроль и управление положением ротора электромеханического преобразователя энергии в магнитном подшипнике посредством датчиков, установленных в глухих отверстиях на внешней поверхности корпуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления положением ротора электрической машины на бесконтактных подшипниках (варианты) и электрическая машина для его реализации | 2017 |
|
RU2656871C1 |
| УПРАВЛЯЕМЫЙ МАГНИТНЫЙ ПОДШИПНИК НА ПОСТОЯННЫХ МАГНИТАХ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2563884C2 |
| СПОСОБ БЕССЕНСОРНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ РОТОРА В БЕСКОНТАКТНЫХ ПОДШИПНИКАХ | 2014 |
|
RU2539690C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| СПОСОБ РАЗГРУЗКИ ПОДШИПНИКОВ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ ЭНЕРГИИ | 2014 |
|
RU2557333C1 |
| Система управления электромагнитным подвесом ротора | 2024 |
|
RU2831082C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ НАКОПИТЕЛЬ ЭНЕРГИИ | 2020 |
|
RU2760784C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОСЕВЫМ ЭЛЕКТРОМАГНИТНЫМ ПОДШИПНИКОМ РОТОРА С АДАПТАЦИЕЙ К ИЗМЕНЕНИЮ СТАТИЧЕСКОЙ СИЛЫ | 2021 |
|
RU2777512C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2011 |
|
RU2460909C1 |
| Способ управления радиальными активными магнитными подшипниками роторной машины и роторная машина | 1990 |
|
SU1751499A1 |
Изобретение относится к области электротехники и может быть использовано в электромеханических преобразователях энергии на магнитных подшипниках. Технический результат заключается в повышении точности и надежности управления магнитным подшипником. Управление положением ротора осуществляют по напряженности внешнего магнитного поля магнитных подшипников на постоянных магнитах, использующихся в качестве основных опорных подшипников, информация об изменении которой поступает в пропорционально-интегрально-дифференциальный регулятор и силовой преобразователь, которые регулируют напряжение на двух электромагнитах, управляющих неустойчивостью ротора. Устройство управления магнитным подшипником содержит магнитные подшипники на постоянных магнитах, пропорционально-интегрально-дифференциальный регулятор, силовой преобразователь, два электромагнита, датчики положения ротора, выполненные в виде датчиков внешнего магнитного поля, установленных на внешней поверхности корпуса. 2 н.п. ф-лы, 4 ил.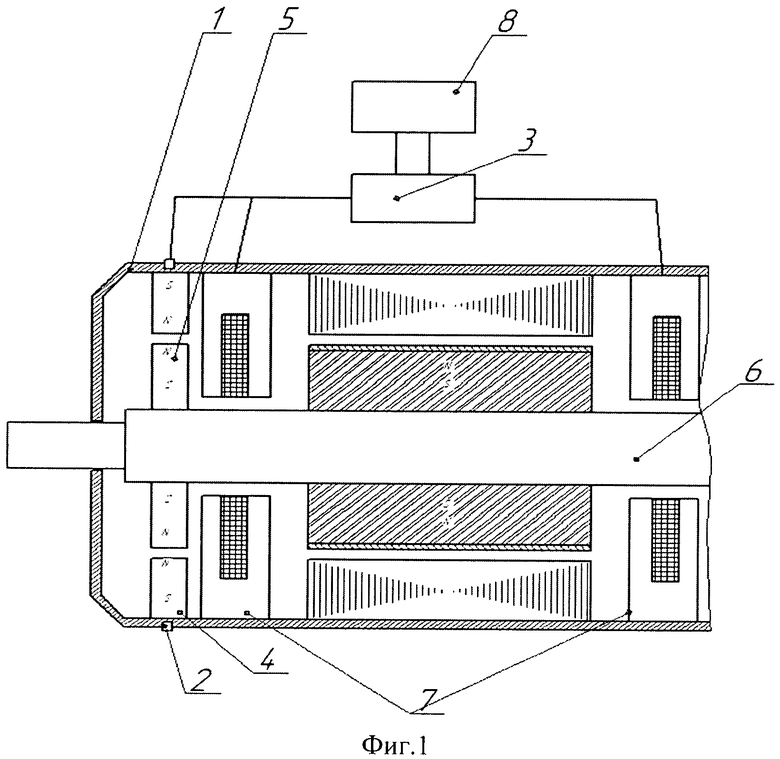
1. Способ управления положением ротора в магнитных подшипниках, заключающийся в получении сигнала с датчика, электрически соединенного с пропорционально-интегрально-дифференциальным регулятором и силовым преобразователем, отличающийся тем, что управление положением ротора осуществляют по напряженности внешнего магнитного поля магнитных подшипников на постоянных магнитах, использующихся в качестве основных опорных подшипников, информация об изменении которой поступает в пропорционально-интегрально-дифференциальный регулятор и силовой преобразователь, которые регулируют напряжение на двух электромагнитах, посредством которых управляют неусточивостью ротора.
2. Устройство управления магнитным подшипником, содержащее магнитные подшипники на постоянных магнитах, пропорционально-интегрально-дифференциальный регулятор, силовой преобразователь и два электромагнита, отличающееся тем, что датчики положения ротора выполнены в виде датчиков внешнего магнитного поля, установленных на внешней поверхности корпуса.
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| СПОСОБЫ УПРАВЛЕНИЯ НЕУСТОЙЧИВОСТЬЮ В ГИДРОДИНАМИЧЕСКИХ ПОДШИПНИКАХ | 2005 |
|
RU2399803C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2181922C2 |
| Устройство для подбивки железнодорожного балласта | 1934 |
|
SU43661A1 |
| Понтон для поддержания плавучего грунтопровода землесоса | 1956 |
|
SU109243A1 |
| Способ закалки изделия | 1941 |
|
SU62750A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ВЫКЛЮЧАТЕЛЬЗаявлено 17 февраля 1961 г. за Л» 697326/24-7 в Комитет по делам изобретений и открытий при Совете Л\инистров СССРОпубликовано в «Бюллетене изобретений и товарных знаков» № 17 за 1963 г. | 0 |
|
SU156993A1 |
| JP 859205026 A, 20.11.1984 | |||
| Подборщик-измельчитель виноградной лозы | 1989 |
|
SU1713490A1 |
| CN 101931371 A, 29.12.2010 | |||
| US 5486729 A, 23.01.1996 | |||

