Изобретение относится к энергетическим и гидротехническим сооружениям при перепуске больших количеств воды, в частности к устройствам управления приводом затвора гидротехнического сооружения, и может быть использовано для управления движением штока силового гидроцилиндра либо иного исполнительного механизма, соединенного с гидротехническим затвором.
Известен способ позиционирования гидротехнического затвора, включающий пуск электродвигателя при плавном повышении частоты вращения, при этом одновременно, в соответствии с требуемым законом движения, подают сигнал на изменение рабочего объема насоса и замедленно переключают в правое положение распределитель, что обеспечивает подачу рабочей жидкости в штоковую полость гидроцилиндра и, как следствие, начало плавного движения гидротехнического затвора, а слив рабочей жидкости производят через гидрозамок, распределитель и гидромотор, обеспечивающий требуемую жесткость привода регулированием нагрузки на электрогенераторе, производимым блоком системы управления в соответствии с величиной и знаком силы сопротивления (см. авторское свидетельство SU №1506015, 07.09.1989).
Из этого же авторского свидетельства известно устройство для позиционирования двустворчатых ворот шлюза, содержащее гидросистемы, каждая из которых включает гидронасосы, связанные с двигателями, и горизонтально установленный гидроцилиндр, соединенные сливной и напорной магистралями с системой распределения жидкости, включающей распределитель с электрогидравлическим управлением, а также блок обработки информации и выработки управляющих сигналов, связанный с датчиками контроля перемещения каждой створки ворот, причем блок обработки информации и выработки управляющих сигналов связан с электромоторами и электрогенераторами каждой гидросистемы.
Данный способ и устройство для его осуществления позволяют обеспечить перемещение гидротехнического затвора. Однако при данном способе позиционирования отсутствует контроль за положением гидротехнического затвора в процессе его перемещения, что снижает надежность работы гидротехнического сооружения.
Наиболее близким к изобретению по технической сущности и достигаемому результату является способ контроля позиционирования створки ворот шлюза, включающий подачу управляющего сигнала на привод перемещения створки ворот шлюза и контроль положения створки ворот посредством энкодера, при этом сигнальный выход энкодера подключают к вычислительному устройству (см. патент CN №200946259, 12.09.2007).
Из этого же патента известно устройство контроля позиционирования створки ворот шлюза, содержащее привод перемещения створки ворот шлюза и энкодер для контроля положения створки ворот, при этом сигнальный выход энкодера подключен к вычислительному устройству.
Данный способ позиционирования и устройство для его осуществления позволяют контролировать положение и перемещение створки ворот шлюза в процессе его перемещения. Однако данные способ и устройство позволяют контролировать положение створки при ее продольном перемещении, что сужает возможности устройства для позиционирования. Кроме того, данные способ и устройство обеспечивают контроль положения створки с существенными погрешностями, вызванными местом крепления энкодера, в силу чего на показания последнего влияют присущие месту крепления нелинейности типа люфт, сухое трение и пр., влияние которых непредсказуемо растет по мере эксплуатации затвора, вызывая створение с ударами.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение контроля положения створок ворот гидротехнического затвора во всем рабочем ходе створок ворот шлюза и исключение влияния погрешностей измерений для обеспечения безударного створения створок ворот.
Технический результат заключается в том, что достигается повышение точности позиционирования створок ворот шлюза при их перемещении и, как следствие, возможность их плавного безударного створения.
В части способа как объекта изобретения указанная задача решается, а технический результат достигается за счет того, что способ контроля позиционирования створок двустворчатых ворот шлюза включает подачу управляющего сигнала на приводы перемещения каждой из створок ворот шлюза и контроль положения каждой из створок ворот посредством установленных на каждой створке двух абсолютных угловых энкодеров и одного линейного абсолютного энкодера, при этом на каждой створке ворот на внутренней по отношению к камере шлюза кромке створки ворот жестко закрепляют корпус первого углового энкодера, корпус второго углового энкодера жестко закрепляют на близлежащей стенке камеры шлюза, и оба угловых энкодера устанавливают в одной горизонтальной плоскости, каждую створку снабжают пневмоцилиндром со штоком, на каждой створке ворот корпус пневмоцилиндра жестко по координате вращения связывают с валом второго углового энкодера, шток пневмоцилиндра жестко по координате вращения связывают с валом первого углового энкодера, линейный абсолютный энкодер закрепляют на пневмоцилиндре с возможностью измерения им хода штока пневмоцилиндра, а также вычислительным устройством, входы которого соединяют с сигнальными выходами всех энкодеров, причем перед началом контроля позиционирования внутреннюю стенку каждой из створок ворот устанавливают параллельно соответствующей стенке камеры шлюза, для каждой створки ворот в обоих абсолютных угловых энкодерах выставляют равные значения угла, в абсолютном линейном энкодере устанавливают фиксированную величину линейного размера, данные со всех энкодеров передают в вычислительное устройство, и в нем на основе этих данных формируют декартову либо полярную систему координат, в которой и осуществляют контроль положения любой точки каждой из створок при повороте последних, причем угловое положение внутренних стенок створок ворот по отношению к стенкам камеры шлюза определяют по разнице показаний углов поворота валов абсолютных угловых энкодеров, формируемой в вычислительном устройстве, а линейные координаты определяют по линейному перемещению штока пневмоцилиндра по сигналам в вычислительное устройство от линейного абсолютного энкодера.
В части устройства как объекта изобретения указанная задача решается, а технический результат достигается за счет того, что устройство контроля позиционирования створок двустворчатых ворот шлюза содержит привод перемещения каждой из створок ворот шлюза и устройство контроля положения каждой из створок ворот посредством установленных на каждой створке двух абсолютных угловых энкодеров и одного линейного абсолютного энкодера, при этом на каждой створке ворот на ее внутренней по отношению к камере шлюза кромке жестко закреплен корпус первого углового энкодера, корпус второго углового энкодера жестко закреплен на близлежащей стенке камеры шлюза, и оба угловых энкодера установлены в одной горизонтальной плоскости, каждая створка снабжена пневмоцилиндром со штоком, на каждой створке ворот корпус пневмоцилиндра жестко по координате вращения связан с валом второго углового энкодера, шток пневмоцилиндра жестко по координате вращения связан с валом первого углового энкодера, линейный абсолютный энкодер закреплен на пневмоцилиндре с возможностью измерения им хода штока пневмоцилиндра, причем устройство снабжено вычислительным устройством, входы которого соединены с сигнальными выходами всех энкодеров, перед началом контроля позиционирования внутренняя стенка каждой из створок ворот установлена параллельно соответствующей стенке камеры шлюза, предварительно в обоих абсолютных угловых энкодерах для каждой створки ворот выставлены равные значения угла, а в абсолютном линейном энкодере установлена фиксированная величина линейного размера.
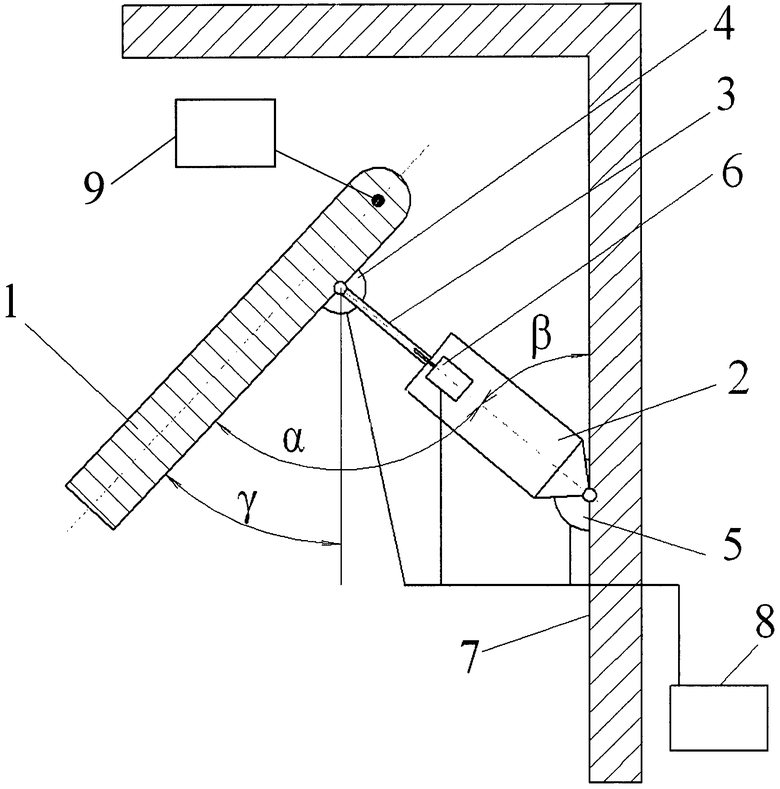
На чертеже схематически представлено устройство контроля позиционирования створок двустворчатых ворот шлюза на примере одной из створок ворот шлюза.
Устройство контроля позиционирования створок 1 двустворчатых ворот шлюза содержит для каждой створки 1 привод перемещения 9, связанный с осью вращения створки 1 ворот шлюза, и устройство контроля положения каждой из створок 1 ворот посредством установленных на каждой створке 1 двух абсолютных угловых энкодеров 4 и 5 и одного линейного абсолютного энкодера 6. На каждой створке 1 ворот на ее внутренней по отношению к камере шлюза кромке жестко закреплен корпус первого углового энкодера 4. Корпус второго углового энкодера 5 жестко закреплен на близлежащей стенке 7 камеры шлюза, и оба угловых энкодера 4 и 5 установлены в одной горизонтальной плоскости. Каждая створка 1 снабжена пневмоцилиндром 2 со штоком 3. На каждой створке 1 ворот корпус пневмоцилиндра 2 жестко по координате вращения связан с валом второго углового энкодера 5, шток 3 пневмоцилиндра 2 жестко по координате вращения связан с валом первого углового энкодера 4. Линейный абсолютный энкодер 6 закреплен на пневмоцилиндре 2 с возможностью измерения им хода штока 3 пневмоцилиндра 2. Устройство снабжено вычислительным устройством 8, входы которого соединены с сигнальными выходами всех энкодеров 4, 5 и 6, перед началом контроля позиционирования внутренняя стенка каждой из створок 1 ворот установлена параллельно соответствующей стенке 7 камеры шлюза. Предварительно в обоих абсолютных угловых энкодерах 4 и 5 для каждой створки 1 ворот выставлены равные значения угла, а в абсолютном линейном энкодере 6 установлена фиксированная величина линейного размера.
Способ контроля позиционирования створок 1 двустворчатых ворот шлюза реализуют следующим образом.
Включают подачу управляющего сигнала на приводы перемещения 9 каждой из створок 1 ворот шлюза и контроль положения каждой из створок 1 ворот осуществляют посредством двух абсолютных угловых энкодеров 4 и 5 и одного линейного абсолютного энкодера 6. Входы вычислительного устройства 8 соединяют с сигнальными выходами всех энкодеров 4, 5 и 6, причем перед началом контроля позиционирования внутреннюю стенку каждой из створок 1 ворот устанавливают параллельно соответствующей стенке камеры шлюза, для каждой створки 1 ворот в обоих абсолютных угловых энкодерах 4 и 5 выставляют равные значения угла, а в абсолютном линейном энкодере 6 устанавливают фиксированную величину линейного размера. Данные со всех экодеров 4, 5 и 6 передают в вычислительное устройство 8, и в нем на основе этих данных формируют декартову либо полярную систему координат, в которой и осуществляют контроль положения любой точки каждой из створок 1 при повороте последних. Угловое положение (γ) внутренних стенок створок 1 ворот по отношению к близлежащей стенке 7 камеры шлюза определяют по разнице показаний углов поворота (γ=α-β) валов абсолютных угловых энкодеров 4 и 5, формируемой в вычислительном устройстве 8, а линейные координаты определяют по линейному перемещению штока 3 пневмоцилиндра 2 по сигналам в вычислительное устройство 8 от линейного абсолютного энкодера 6.
Настоящее изобретение может быть использовано на различного рода энергетических и гидротехнических сооружениях при перепуске больших количеств воды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПРОЦЕССА СТВОРЕНИЯ ДВУХСТВОРЧАТЫХ ВОРОТ ШЛЮЗОВОГО ОТСЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2623044C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ДВУСТВОРЧАТЫХ ВОРОТ СУДОХОДНОГО ШЛЮЗА | 2012 |
|
RU2496940C1 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ ГИДРОПРИВОД ДЛЯ ГИДРОТЕХНИЧЕСКОГО ЗАТВОРА | 2010 |
|
RU2435991C1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Сегментный затвор с гидравлическим приводом | 2022 |
|
RU2810327C1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| МНОГОУРОВНЕВАЯ ОТКАЗОУСТОЙЧИВАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБОРУДОВАНИЕМ СУДОХОДНОГО ГИДРОТЕХНИЧЕСКОГО СООРУЖЕНИЯ | 2014 |
|
RU2565019C1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1989 |
|
SU1680858A1 |
| Стопорное устройство,преимущественно для двустворчатых ворот шлюзов | 1980 |
|
SU908997A1 |
Изобретение относится к энергетическим и гидротехническим сооружениям при перепуске больших количеств воды, в частности к устройствам управления приводом затвора гидротехнического сооружения. Способ включает подачу управляющего сигнала на приводы перемещения каждой из створок ворот шлюза и контроль положения каждой из створок ворот посредством установленных на каждой створке двух абсолютных угловых энкодеров и одного линейного абсолютного энкодера. На каждой створке ворот на внутренней по отношению к камере шлюза кромке створки ворот жестко закрепляют корпус первого углового энкодера. Корпус второго углового энкодера жестко закрепляют на близлежащей стенке камеры шлюза. Оба угловых энкодера устанавливают в одной горизонтальной плоскости. Каждую створку снабжают пневмоцилиндром со штоком. На каждой створке ворот корпус пневмоцилиндра жестко по координате вращения связывают с валом второго углового энкодера. Шток пневмоцилиндра жестко по координате вращения связывают с валом первого углового энкодера, а линейный абсолютный энкодер закрепляют на пневмоцилиндре с возможностью измерения им хода штока пневмоцилиндра. Устройство снабжено вычислительным устройством, входы которого соединяют сигнальными выходами всех энкодеров. Перед началом контроля позиционирования внутреннюю стенку каждой из створок ворот устанавливают параллельно соответствующей стенке камеры шлюза. Для каждой створки ворот в обоих абсолютных угловых энкодерах выставляют равные значения угла, а в абсолютном линейном энкодере устанавливают фиксированную величину линейного размера. Данные со всех энкодеров передают в вычислительное устройство и в нем на основе этих данных формируют декартову либо полярную систему координат, в которой и осуществляют контроль положения любой точки каждой из створок при повороте последних. Угловое положение внутренних стенок створок ворот по отношению к стенкам камеры шлюза определяют по разнице показаний углов поворота валов абсолютных угловых энкодеров, формируемой в вычислительном устройстве. Линейные координаты определяют по линейному перемещению штока пневмоцилиндра по сигналам в вычислительное устройство от линейного абсолютного энкодера. Способ осуществляется с помощью устройства, конструкция и расположение элементов которого описаны выше. Повышается точность положения створок ворот шлюза при их перемещении. 2 н.п. ф-лы, 1 ил.
1. Способ контроля позиционирования створок двустворчатых ворот шлюза, включающий подачу управляющего сигнала на приводы перемещения каждой из створок ворот шлюза и контроль положения каждой из створок ворот посредством установленных на каждой створке двух абсолютных угловых энкодеров и одного линейного абсолютного энкодера, при этом на каждой створке ворот на внутренней по отношению к камере шлюза кромке створки ворот жестко закрепляют корпус первого углового энкодера, корпус второго углового энкодера жестко закрепляют на близлежащей стенке камеры шлюза, и оба угловых энкодера устанавливают в одной горизонтальной плоскости, каждую створку снабжают пневмоцилиндром со штоком, на каждой створке ворот корпус пневмоцилиндра жестко по координате вращения связывают с валом второго углового энкодера, шток пневмоцилиндра жестко по координате вращения связывают с валом первого углового энкодера, линейный абсолютный энкодер закрепляют на пневмоцилиндре, с возможностью измерения им хода штока пневмоцилиндра, а также вычислительным устройством, входы которого соединяют сигнальными выходами всех энкодеров, причем перед началом контроля позиционирования внутреннюю стенку каждой из створок ворот устанавливают параллельно соответствующей стенке камеры шлюза, для каждой створки ворот в обоих абсолютных угловых энкодерах выставляют равные значения угла, в абсолютном линейном энкодере устанавливают фиксированную величину линейного размера, данные со всех экодеров передают в вычислительное устройство, и в нем на основе этих данных формируют декартову либо полярную систему координат, в которой и осуществляют контроль положения любой точки каждой из створок при повороте последних, причем угловое положение внутренних стенок створок ворот по отношению к стенкам камеры шлюза определяют по разнице показаний углов поворота валов абсолютных угловых энкодеров, формируемой в вычислительном устройстве, а линейные координаты определяют по линейному перемещению штока пневмоцилиндра по сигналам в вычислительное устройство от линейного абсолютного энкодера.
2. Устройство контроля позиционирования створок двустворчатых ворот шлюза, содержащее привод перемещения каждой из створок ворот шлюза и устройство контроля положения каждой из створок ворот посредством установленных на каждой створке двух абсолютных угловых энкодеров и одного линейного абсолютного энкодера, при этом на каждой створке ворот на ее внутренней по отношению к камере шлюза кромке жестко закреплен корпус первого углового энкодера, корпус второго углового энкодера жестко закреплен на близлежащей стенке камеры шлюза, и оба угловых энкодера установлены в одной горизонтальной плоскости, каждая створка снабжена пневмоцилиндром со штоком, на каждой створке ворот корпус пневмоцилиндра жестко по координате вращения связан с валом второго углового энкодера, шток пневмоцилиндра жестко по координате вращения связан с валом первого углового энкодера, линейный абсолютный энкодер закреплен на пневмоцилиндре с возможностью измерения им хода штока пневмоцилиндра, причем устройство снабжено вычислительным устройством, входы которого соединены с сигнальными выходами всех энкодеров, перед началом контроля позиционирования внутренняя стенка каждой из створок ворот установлена параллельно соответствующей стенке камеры шлюза, предварительно в обоих абсолютных угловых энкодерах для каждой створки ворот выставлены равные значения угла, а в абсолютном линейном энкодере установлена фиксированная величина линейного размера.
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| Электрогидропривод двустворчатых ворот шлюза | 1987 |
|
SU1506015A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1989 |
|
SU1680858A1 |
| CN 200946259 Y, 12.09.2007 | |||
| 0 |
|
SU1389653A1 | |

