Изобретение относится к энергетическим и гидротехническим сооружениям при перепуске больших количеств воды, в частности к устройствам управления электрогидравлическим приводом затвора гидротехнического сооружения, и может быть использовано для управления движением штока силового гидроцилиндра, соединенного с гидротехническим затвором.
Известен способ позиционирования гидротехнического затвора, включающий пуск электродвигателя при плавном повышении его частоты вращения, при этом одновременно, в соответствии с требуемым законом движения, подают сигнал на изменение рабочего объема насоса и замедленно переключают в правое положение распределитель, что обеспечивает подачу рабочей жидкости в штоковую полость гидроцилиндра и, как следствие, начало плавного движения гидротехнического затвора, а слив рабочей жидкости производят через гидрозамок, распределитель и гидромотор, обеспечивающий требуемую жесткость привода регулированием нагрузки на электрогенераторе, производимым блоком системы управления в соответствии с величиной и знаком силы сопротивления (см. авторское свидетельство SU №1506015, 07.09.1989).
Данный способ позволяет обеспечить перемещение гидротехнического затвора. Однако при данном способе позиционирования отсутствует контроль за положением гидротехнического затвора в процессе его перемещения, что снижает надежность работы гидротехнического сооружения.
Наиболее близким к изобретению по технической сущности и достигаемому результату является способ позиционирования гидротехнического затвора, соединенного со штоком силового гидроцилиндра, включающий программно регулируемую посредством соединенного с программируемым терминалом программируемого контроллера подачу рабочей жидкости под шток силового гидроцилиндра, путем изменения частотным преобразователем частоты вращения электродвигателя, соединенного с валом насоса, подключенного входом к баку питания и выходом через напорно-сливную магистраль с фильтром и запорной арматурой - к входной магистрали силового гидроцилиндра, слив рабочей жидкости осуществляют по контуру «полость силового гидроцилиндра - напорно-сливная магистраль - насос - бак питания» с поддержанием за счет программного регулирования контроллером и частотным преобразователем требуемой скорости опускания штока с затвором (см. авторское свидетельство SU №1617086, 30.12.1990).
Данный способ позиционирования позволяет контролировать перемещение гидротехнического затвора в процессе его перемещения, однако он не учитывает скорость движения гидротехнического затвора в зависимости от его положения, что снижает надежность работы и приводит к повышенным энергозатратам на перемещение гидротехнического затвора.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение контроля перемещения гидротехнического затвора и в зависимости от этого изменение скорости перемещения гидротехнического затвора.
Технический результат заключается в том, что достигается повышение надежности перемещения гидротехнического затвора при снижении затрат энергии на его перемещение.
Указанная задача решается, а технический результат достигается за счет того, что способ позиционирования гидротехнического затвора, соединенного со штоком силового гидроцилиндра, включает программно регулируемую посредством соединенного с программируемым терминалом программируемого контроллера подачу рабочей жидкости под шток силового гидроцилиндра путем изменения частотным преобразователем частоты вращения электродвигателя, соединенного с валом насоса, подключенного входом к баку питания и выходом через напорно-сливную магистраль с фильтром и запорной арматурой - к входной магистрали силового гидроцилиндра, слив рабочей жидкости осуществляют по контуру «полость силового гидроцилиндра - напорно-сливная магистраль - насос - бак питания» с поддержанием за счет программного регулирования контроллером и частотным преобразователем требуемой скорости опускания штока с затвором, при этом предварительно на напорно-сливной магистрали устанавливают датчик давления, выход которого подключают к программируемому контроллеру и посредством датчика давления контролируют в напорно-сливной магистрали величину давления, кроме того, шток гидроцилиндра оснащают закрепленными на нем датчиком скорости перемещения гидротехнического затвора и датчиком положения гидротехнического затвора, выходы которых подключают ко входам контроллера, причем за счет системной обратной связи организуют с помощью указанных выше датчиков, программируемого контроллера и частотного преобразователя требуемое позиционирование штока гидроцилиндра, при этом при подъеме гидротехнического затвора для перемещения последнего вверх с программируемого терминала, который выполняют сенсорным, вначале подают команду на подъем гидротехнического затвора, для чего в напорно-сливной магистрали поднимают насосом давление до заданной величины и посредством датчика давления контролируют нарастание давления до заданной величины и по командам программируемого контролера поддерживают заданное давление в напорно-сливной магистрали и, как следствие, под поршнем силового гидроцилиндра и по полученной информации посредством частотного преобразователя изменяют частоту вращения вала электродвигателя, а следовательно, и производительность насоса, при этом дальнейший подъем осуществляют на постоянных программируемых контроллером давлениях в напорно-сливной магистрали для преодоления больших нагрузок типа сухое трение, и этот режим движения гидротехнического затвора осуществляют до момента получения сигнала контроллером от датчика положения гидротехнического затвора о выходе гидротехнического затвора из соприкосновения с уплотнением, соответствующим положению полного открытия гидротехнического затвора, после чего продолжают подъем гидротехнического затвора с требуемой заданной постоянной скоростью с последующим переходом по команде программируемого контроллера в режим с уменьшением скорости движения гидротехнического затвора до 0,1-0,2 VП, где VП - постоянная скорость перемещения гидротехнического затвора перед его торможением при положении гидротехнического затвора на высоте 0,95-0,97 Н, где Н - заданная с программируемого терминала высота подъема гидротехнического затвора, при достижении которой программируемый контроллер выдает команду частотному преобразователю на включение электрического тормоза и остановку гидротехнического затвора в заданном положении, а движение гидротехнического затвора вниз осуществляют путем слива рабочей жидкости из-под поршня силового гидроцилиндра через насосно-сливную магистраль и насос, работающий в этот момент в моторном режиме, при этом по команде с программируемого терминала с помощью программируемого контроллера, управляющего частотным преобразователем, поддерживают заданную скорость движения вниз гидротехнического затвора путем стабилизации расхода рабочей жидкости по напорно-сливной магистрали, при этом перемещение гидротехнического затвора контролируют датчиком скорости перемещения гидротехнического затвора и по показаниям последнего, программируемым контроллером, регулируют скорость перемещения гидротехнического затвора и его останов в крайнем нижнем положении.
На чертеже представлена блок-схема системы позиционирования гидротехническим затвором.
Система позиционирования гидротехнического затвора содержит соединенный со штоком силового гидроцилиндра 1 гидротехнический затвор 2, выполненный сенсорным программируемый терминал 3, программируемый контроллер 4, частотный преобразователь 5 частоты вращения электродвигателя 6, соединенного с валом насоса 7, подключенного входом к баку питания 9 и выходом через напорно-сливную магистраль 10 с фильтром 11 и запорной арматурой - к входной магистрали силового гидроцилиндра 1. На напорно-сливной магистрали 10 установлен датчик давления 12, выход которого подключен к программируемому контроллеру 4. Посредством датчика давления 12 контролируют в напорно-сливной магистрали 10 величину давления. Шток гидроцилиндра 1 оснащен закрепленными на нем датчиком скорости перемещения 13 гидротехнического затвора 2 и датчиком положения 14 гидротехнического затвора 2, выходы которых подключены ко входам программируемого контроллера 4.
Способ позиционирования гидротехнического затвора 2, соединенного со штоком силового гидроцилиндра 1, включает программно регулируемую посредством соединенного с программируемым терминалом 3 программируемого контроллера 4 подачу рабочей жидкости под шток силового гидроцилиндра 1 путем изменения частотным преобразователем 5 частоты вращения электродвигателя 6, соединенного с валом насоса 7, подключенного входом к баку питания 9 и выходом через напорно-сливную магистраль 10 с фильтром 11 и запорной арматурой - к входной магистрали силового гидроцилиндра 1.
Слив рабочей жидкости осуществляют по контуру «полость силового гидроцилиндра 1 - напорно-сливная магистраль 10 - насос 7 - бак питания 9» с поддержанием за счет программного регулирования программируемым контроллером 4 и частотным преобразователем 5 требуемой скорости опускания штока гидроцилиндра 1 с прикрепленным к нему гидротехническим затвором 2.
Предварительно на напорно-сливной магистрали 10 устанавливают датчик давления 12, выход которого подключают к программируемому контроллеру 4. Посредством датчика давления 12 контролируют в напорно-сливной магистрали 10 величину давления. Шток гидроцилиндра 1 оснащают закрепленными на нем датчиком скорости 13 перемещения гидротехнического затвора 2 и датчиком положения 14 гидротехнического затвора 2, выходы которых подключают ко входам программируемого контроллера 4. За счет системной обратной связи организуют с помощью указанных выше датчиков 13 и 14, программируемого контроллера 4 и частотного преобразователя 5 требуемое позиционирование штока гидроцилиндра 1.
При подъеме гидротехнического затвора 2 для перемещения последнего вверх с программируемого терминала 3 вначале подают команду на подъем гидротехнического затвора 2, для чего в напорно-сливной магистрали 10 поднимают насосом 7 давление до заданной величины, и посредством датчика давления 12 контролируют нарастание давления до заданной величины, и по командам программируемого контролера поддерживают заданное давление в напорно-сливной магистрали 10, и, как следствие, под поршнем силового гидроцилиндра 1 и по полученной информации посредством частотного преобразователя 5 изменяют частоту вращения вала электродвигателя 6, а следовательно, и производительность насоса 7.
Дальнейший подъем осуществляют на постоянных программируемых контроллером 4 давлениях в напорно-сливной магистрали 10 для преодоления больших нагрузок типа сухое трение, и этот режим движения гидротехнического затвора 2 осуществляют до момента получения сигнала программируемым контроллером 4 от датчика положения 14 гидротехнического затвора 2 о выходе гидротехнического затвора 2 из соприкосновения с уплотнением, соответствующим положению полного открытия гидротехнического затвора 2. Затем продолжают подъем гидротехнического затвора 2 с требуемой заданной постоянной скоростью с последующим переходом по команде программируемого контроллера 4 в режим с уменьшением скорости движения гидротехнического затвора 2 до 0,1-0,2 VП, где VП - постоянная скорость перемещения гидротехнического затвора 2 перед его торможением при положении гидротехнического затвора 2 на высоте 0,95-0,97 Н, где Н - заданная с программируемого терминала высота подъема гидротехнического затвора 2, что позволяет точно позиционировать гидротехнический затвор и при этом предотвратить вибрацию гидротехнического затвора в процессе его остановки на требуемой заранее заданной высоте, при достижении которой программируемый контроллер 4 выдает команду частотному преобразователю 5 на включение электрического тормоза и остановку гидротехнического затвора 2 в заданном положении.
Движение гидротехнического затвора 2 вниз осуществляют путем слива рабочей жидкости из-под поршня силового гидроцилиндра 1 через насосно-сливную магистраль 10 и насос 7, работающий в этот момент в моторном режиме, при этом по команде с программируемого терминала 3 с помощью программируемого контроллера 4 управляющего частотным преобразователем 5 поддерживают заданную скорость движения вниз гидротехнического затвора 2 путем стабилизации расхода рабочей жидкости по напорно-сливной магистрали 10, при этом перемещение гидротехнического затвора 2 контролируют датчиком скорости 13 перемещения гидротехнического затвора 2 и по показаниям последнего, программируемым контроллером 4, регулируют скорость перемещения гидротехнического затвора 2 и его остановку в крайнем нижнем положении.
Настоящее изобретение может быть использовано на различного рода энергетических и гидротехнических сооружениях при перепуске больших количеств воды.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ ГИДРОПРИВОД ДЛЯ ГИДРОТЕХНИЧЕСКОГО ЗАТВОРА | 2010 |
|
RU2435991C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ДВУСТВОРЧАТЫХ ВОРОТ СУДОХОДНОГО ШЛЮЗА | 2012 |
|
RU2496940C1 |
| МНОГОУРОВНЕВАЯ ОТКАЗОУСТОЙЧИВАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОБОРУДОВАНИЕМ СУДОХОДНОГО ГИДРОТЕХНИЧЕСКОГО СООРУЖЕНИЯ | 2014 |
|
RU2565019C1 |
| Сегментный затвор с гидравлическим приводом | 2022 |
|
RU2810327C1 |
| СПОСОБ КОНТРОЛЯ ПОЗИЦИОНИРОВАНИЯ СТВОРОК ДВУСТВОРЧАТЫХ ВОРОТ ШЛЮЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459033C1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Устройство управления гидроприводом затвора шлюза | 1990 |
|
SU1745815A1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2021 |
|
RU2769457C1 |
| СПОСОБ ИСПЫТАНИЯ ГИДРОЦИЛИНДРОВ НА ФУНКЦИОНИРОВАНИЕ, РЕСУРС И НАРАБОТКУ ДО ОТКАЗА | 2012 |
|
RU2511886C2 |
Изобретение относится к энергетическим и гидротехническим сооружениям при перепуске больших количеств воды, в частности к устройствам управления электрогидравлическим приводом затвора гидротехнического сооружения. Предварительно на напорно-сливной магистрали устанавливают датчик давления, выход которого подключают к программируемому контроллеру и посредством датчика давления контролируют в напорно-сливной магистрали величину давления. Шток гидроцилиндра оснащают закрепленными на нем датчиком скорости перемещения гидротехнического затвора и датчиком положения гидротехнического затвора, выходы которых подключают ко входам контроллера. За счет системной обратной связи организуют с помощью указанных выше датчиков, программируемого контроллера и частотного преобразователя требуемое позиционирование штока гидроцилиндра. При подъеме гидротехнического затвора для перемещения последнего вверх с программируемого терминала, который выполняют сенсорным, вначале подают команду на подъем гидротехнического затвора, для чего в напорно-сливной магистрали поднимают насосом давление до заданной величины и посредством датчика давления контролируют нарастание давления до заданной величины и по командам программируемого контролера поддерживают заданное давление в напорно-сливной магистрали и, как следствие, под поршнем силового гидроцилиндра и по полученной информации посредством частотного преобразователя изменяют частоту вращения вала электродвигателя, а следовательно, и производительность насоса. Дальнейший подъем осуществляют на постоянных программируемых контроллером давлениях в напорно-сливной магистрали для преодоления больших нагрузок типа сухое трение, и этот режим движения гидротехнического затвора осуществляют до момента получения сигнала контроллером от датчика положения гидротехнического затвора о выходе гидротехнического затвора из соприкосновения с уплотнением, соответствующим положению полного открытия гидротехнического затвора. После чего продолжают подъем гидротехнического затвора с требуемой заданной постоянной скоростью с последующим переходом по команде программируемого контроллера в режим с уменьшением скорости движения гидротехнического затвора до 0,1-0,2 Vп, где Vп - постоянная скорость перемещения гидротехнического затвора перед его торможением при положении гидротехнического затвора на высоте 0,95-0,97 Н, где Н - заданная с программируемого терминала высота подъема гидротехнического затвора, при достижении которой программируемый контроллер выдает команду частотному преобразователю на включение электрического тормоза и остановку гидротехнического затвора в заданном положении. Движение гидротехнического затвора вниз осуществляют путем слива рабочей жидкости из-под поршня силового гидроцилиндра через насосно-сливную магистраль и насос, работающий в этот момент в моторном режиме. По команде с программируемого терминала с помощью программируемого контроллера, управляющего частотным преобразователем, поддерживают заданную скорость движения вниз гидротехнического затвора путем стабилизации расхода рабочей жидкости по напорно-сливной магистрали. Перемещение гидротехнического затвора контролируют датчиком скорости перемещения гидротехнического затвора и по показаниям последнего, программируемым контроллером, регулируют скорость перемещения гидротехнического затвора и его останов в крайнем нижнем положении. 1 ил.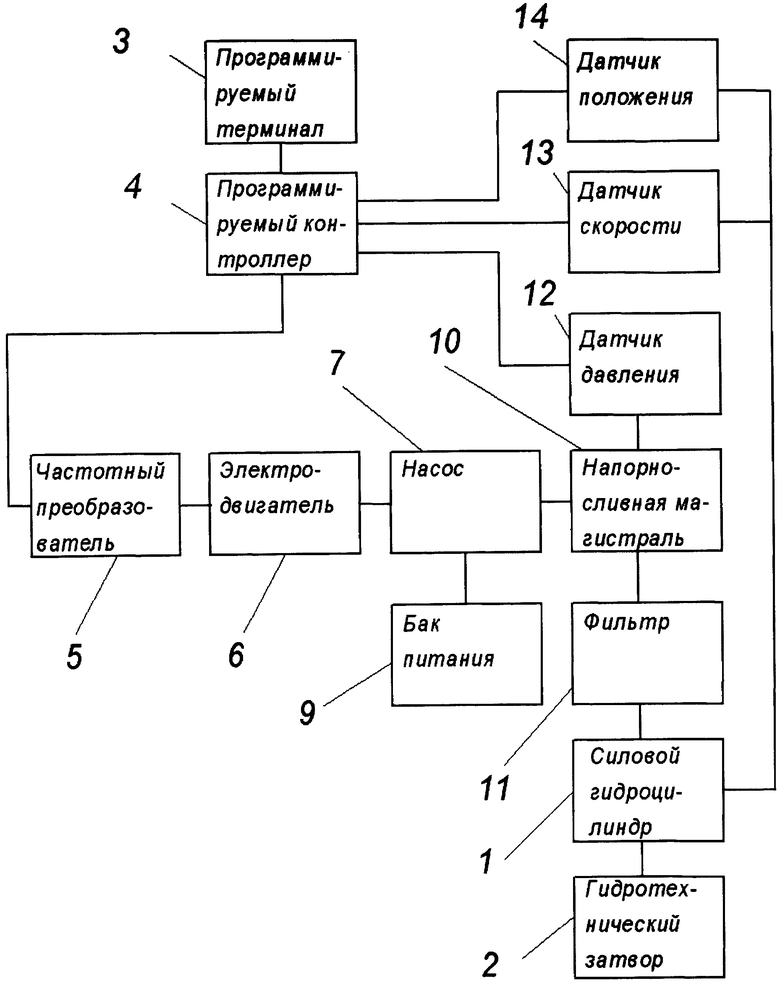
Способ позиционирования гидротехнического затвора, соединенного со штоком силового гидроцилиндра, включающий программно-регулируемую посредством соединенного с программируемым терминалом программируемого контроллера подачу рабочей жидкости под шток силового гидроцилиндра путем изменения частотным преобразователем частоты вращения электродвигателя, соединенного с валом насоса, подключенного входом к баку питания и выходом через напорно-сливную магистраль с фильтром и запорной арматурой - к входной магистрали силового гидроцилиндра, слив рабочей жидкости осуществляют по контуру «полость силового гидроцилиндра - напорно-сливная магистраль - насос - бак питания» с поддержанием за счет программного регулирования контроллером и частотным преобразователем требуемой скорости опускания штока с затвором, отличающийся тем, что предварительно на напорно-сливной магистрали устанавливают датчик давления, выход которого подключают к программируемому контроллеру и посредством датчика давления контролируют в напорно-сливной магистрали величину давления, кроме того, шток гидроцилиндра оснащают закрепленными на нем датчиком скорости перемещения гидротехнического затвора и датчиком положения гидротехнического затвора, выходы которых подключают ко входам контроллера, причем за счет системной обратной связи организуют с помощью указанных выше датчиков, программируемого контроллера и частотного преобразователя требуемое позиционирование штока гидроцилиндра, при этом при подъеме гидротехнического затвора для перемещения последнего вверх с программируемого терминала, который выполняют сенсорным, вначале подают команду на подъем гидротехнического затвора, для чего в напорно-сливной магистрали поднимают насосом давление до заданной величины и посредством датчика давления контролируют нарастание давления до заданной величины, и по командам программируемого контролера поддерживают заданное давление в напорно-сливной магистрали и, как следствие, под поршнем силового гидроцилиндра и по полученной информации посредством частотного преобразователя изменяют частоту вращения вала электродвигателя, а, следовательно, и производительность насоса, при этом дальнейший подъем осуществляют на постоянных программируемых контроллером давлениях в напорно-сливной магистрали для преодоления больших нагрузок, типа сухое трение, и этот режим движения гидротехнического затвора осуществляют до момента получения сигнала контроллером от датчика положения гидротехнического затвора о выходе гидротехнического затвора из соприкосновения с уплотнением, соответствующим положению полного открытия гидротехнического затвора, после чего продолжают подъем гидротехнического затвора с требуемой заданной постоянной скоростью с последующим переходом по команде программируемого контроллера в режим с уменьшением скорости движения гидротехнического затвора до 0,1-0,2 Vп, где Vп - постоянная скорость перемещения гидротехнического затвора перед его торможением при положении гидротехнического затвора на высоте 0,95-0,97 Н, где Н - заданная с программируемого терминала высота подъема гидротехнического затвора, при достижении которой программируемый контроллер выдает команду частотному преобразователю на включение электрического тормоза и остановку гидротехнического затвора в заданном положении, а движение гидротехнического затвора вниз осуществляют путем слива рабочей жидкости из-под поршня силового гидроцилиндра через насосно-сливную магистраль и насос, работающий в этот момент в моторном режиме, при этом по команде с программируемого терминала с помощью программируемого контроллера, управляющего частотным преобразователем, поддерживают заданную скорость движения вниз гидротехнического затвора путем стабилизации расхода рабочей жидкости по напорно-сливной магистрали, при этом перемещение гидротехнического затвора контролируют датчиком скорости перемещения гидротехнического затвора и по показаниям последнего, программируемым контроллером, регулируют скорость перемещения гидротехнического затвора и его останов в крайнем нижнем положении.
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
| Электрогидропривод двустворчатых ворот шлюза | 1987 |
|
SU1506015A1 |
| Гидропривод затвора шлюза | 1984 |
|
SU1208130A1 |
| US 4529004 A, 16.07.1985 | |||
| US 4018249 A, 19.04.1977. | |||

