Предлагаемый токоприемник для транспортных средств с гибридными двигателями предназначен для автоматического присоединения транспортного средства к линии воздушного электроснабжения или отключения от нее в зависимости от взаимного положения транспортного средства и линии электроснабжения без вмешательства водителя. Транспортным средством может являться, например, гибридные грузовой автомобиль, автобус или троллейбус.
Имеются примеры решения проблемы электроснабжения гибридных транспортных средств от воздушных линий электроснабжения.
В онлайн-журнале desinboom от 12 мая 2012 г. (http://www.designboom.com/technology/ehighway-electric-lines-to-power-hybrid-trucks-in-la/) сообщается о разработке компанией Siemens системы eHighway для снабжения гибридных грузовиков энергией от воздушных линий электроснабжения. К недостаткам указанной системы следует отнести громоздкую конструкцию токоприемника, которому для размещения требуется пространство над грузовой частью грузовика, что неприемлемо, например, для контейнеровозов. Другим недостатком является отсутствие автоматического управления подключением токоприемника к линии энергоснабжения, а также движением транспорта вдоль линии электроснабжения. Это приводит к чрезмерной нагрузке водителя, т.к. допустимое отклонение траектории движения автомобиля от трассы воздушной линии электроснабжения, при данной конструкции токоприемника, не должно превышать 30-40 см, а по ходу движения водитель должен вручную управлять переключением токоприемника.
Ближайшим аналогом предлагаемого изобретения является изобретение RU 2421348 C1, в котором решается задача автоматического управления токоприемником и движением транспорта вдоль линии электроснабжения. Недостатком токоприемника, как и в предыдущем случае, является его громоздкая объемная конструкция, мешающая устанавливать грузы на грузовую платформу автомобиля.
Целью предлагаемого изобретения является создание компактного автоматического токоприемника для гибридных грузовых автомобилей, обладающего способностью автоматического подключения к воздушной линии энергоснабжения и позволяющего использовать грузовую платформу автомобиля для погрузочно-разгрузочных работ.
Поставленная цель достигается за счет конструкции токоприемника, в которой подвижная каретка, включающая две скользящих по проводам линии энергоснабжения контактных шины и лазерный локатор, перемещается по горизонтальной направляющей, установленной перпендикулярно продольной оси автомобиля. Направляющая, в свою очередь, жестко соединена со штоками пары вертикальных гидроцилиндров, закрепленных на задней стенке кабины грузовика и поднимающих направляющую с кареткой в вертикальной плоскости. Управление перемещением каретки, а также штоков гидроцилиндров осуществляется бортовым компьютером, установленным в кабине водителя, на основе информации, полученной от лазерного локатора и датчика давления гидрораспределителя.
Особенности и преимущества предлагаемого изобретения станут более наглядными из описания предпочтительных вариантов реализации изобретения, данных исключительно в качестве примеров, со ссылкой на прилагаемые чертежи, где Фиг.1 схематически изображает механизм токоприемника.
Токоприемник (Фиг.1) содержит управляющий бортовой компьютер, установленный в кабине водителя (не показан); пару вертикальных гидроцилиндров 1 с гидрораспределителем, снабженным датчиком давления (не показан), установленных сзади кабины водителя автомобиля 2; направляющую 3, жестко закрепленную на концах штоков 4 гидроцилиндров 1 и оснащенную отражателем 5; подвижную каретку 6, установленную на направляющей 3 и содержащую лазерный локатор 7, контактные шины 8 и исполнительный двигатель 9.
Штоки 4 гидроцилиндров 1, управляемых гидрораспределителем, установлены с возможностью перемещения в вертикальной плоскости направляющей 3, которая ориентирована горизонтально и перпендикулярно продольной оси автомобиля 2. Каретка 6 установлена с возможностью перемещения вдоль направляющей 3 с помощью исполнительного двигателя 9. Лазерный локатор 7 измеряет динамические расстояния до проводов 10 линии энергоснабжения и до отражателя 5, закрепленного на одном из концов направляющей 3. Управляющие команды на гидрораспределитель, исполнительный двигатель 9 и на рулевое управление автомобиля 2 формируются бортовым компьютером на основе измерений лазерного локатора 7 и датчика давления гидрораспределителя.
В исходном состоянии токоприемника штоки 4 гидроцилиндров 1 находятся в опущенном состоянии, а положение каретки 6 на направляющей 3 несущественно.
Работа токоприемника происходит следующим образом.
Когда лазерный локатор 7, измеряя динамические расстояния между кареткой 6 и каждым из проводов 10, фиксирует возможность подключения токоприемника к линии энергоснабжения, компьютер подает управляющие сигналы на исполнительный двигатель 9 каретки 6 и на гидрораспределитель.
При этом каретка 6, перемещаясь по направляющей 3, устанавливается таким образом, что средняя точка каретки 6 равно удалена от каждого из проводов 10 линии энергоснабжения. После этого на гидрораспределитель токоприемника компьютером подается команда, приводящая к подъему штоков 4 гидроцилиндров 1 вместе с направляющей 3 и кареткой 6 до возникновения электрического контакта между линией энергоснабжения и контактными шинами 8. При этом происходит переход от ручного управления автомобилем 2 на автоматическое. В процессе движения автомобиля 2 в гидросистеме токоприемника поддерживается постоянное давление, необходимое для надежного контакта между проводами 10 и шинами 8. В случаях, когда каретка 6 приближается к краю направляющей 3 или когда над автомобилем заканчивается линия энергоснабжения, компьютер переводит токоприемник в нерабочее состояние, а автомобиль переводится на ручное управление.
Предлагаемая конструкция токоприемника в проекции на горизонтальную плоскость занимает очень небольшую площадь и снимает проблемы при погрузочно-разгрузочных работах в кузове автомобиля.
Использование в предлагаемом изобретении вертикальных гидроцилиндров для подъема направляющей с подвижной кареткой приводит к существенному сокращению габаритов токоприемника в горизонтальной плоскости, что создает возможность разместить токоприемник в небольшом пространстве за кабиной грузового автомобиля и освободить пространство над грузовой платформой для погрузочно-разгрузочных работ.
Указанная конструкция по сравнению с обычно применяемыми токоприемниками на основе пантографов обладает большей жесткостью, а также и стабильностью усилия прижима контактных шин каретки к проводам, что повышает надежность контакта между токоприемником и линией энергоснабжения.
Предлагаемая конструкция токоприемника более компактна, проста в эксплуатации и надежна за счет автоматического поддерживания усилия прижима контактных шин к проводам линии энергоснабжения.
При использовании токоприемника только для энергоснабжения автомобиля коридор допустимых отклонений автомобиля от трассы линии энергоснабжения достигает ±1,5 м, что соответствует допустимому диапазону движения каретки 6 по направляющей 5, если расстояние между проводами линии энергоснабжения такое же, как у троллейбусных линий энергоснабжения. Тем самым достигается существенное облегчение работы водителя.
Специалисты в данной области легко найдут, что различные конфигурации и модификации применимы к вышеприведенным примерам реализации изобретения без отклонений от его сути, сформулированной в предлагаемых пунктах формулы и определяемой ими.
Изобретение относится к токоприемникам. Автоматический токоприемник для передачи электроэнергии от воздушной линии энергоснабжения на гибридные грузовые автомобили содержит бортовой компьютер в кабине автомобиля и лазерный локатор для измерения расстояний между проводами и контактными шинами токоприемника. Токоприемник также содержит пару вертикальных гидроцилиндров с датчиком давления, установленных сзади кабины водителя, горизонтальную направляющую с отражателем, закрепленную на штоках гидроцилиндров с возможностью вертикального перемещения и установленную перпендикулярно продольной оси автомобиля. На направляющей с возможностью перемещения установлена каретка с двигателем, контактными шинами для подключения к линии энергоснабжения и лазерным локатором. Достигается автоматическое подключение токоприемника к линии энергоснабжения. 1 ил.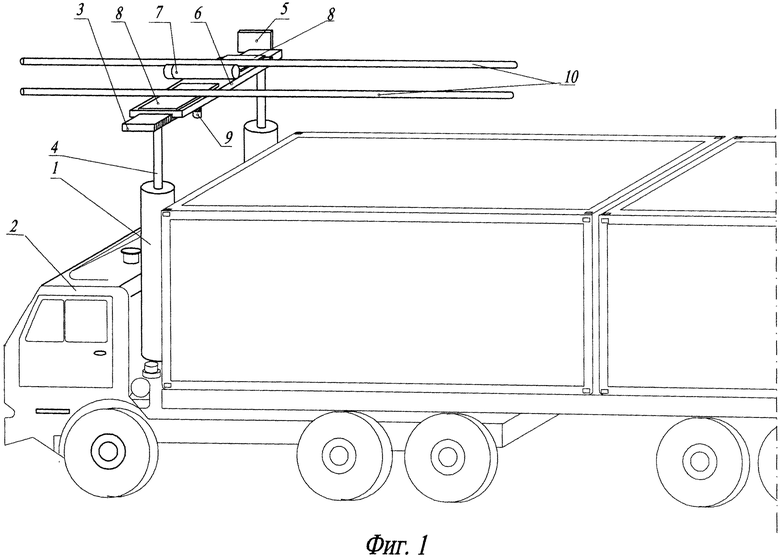
Автоматический токоприемник для передачи электроэнергии от воздушной линии энергоснабжения на гибридные грузовые автомобили, содержащий бортовой управляющий компьютер, установленный в кабине автомобиля, и лазерный локатор для измерения расстояний между проводами линии энергоснабжения и контактными шинами токоприемника, отличающийся тем, что, с целью автоматического подключения к воздушной линии энергоснабжения и обеспечения свободного доступа к грузовой платформе автомобиля, токоприемник содержит пару вертикальных гидроцилиндров с датчиком давления, установленных сзади кабины водителя, горизонтальную направляющую с отражателем, жестко закрепленную на штоках гидроцилиндров с возможностью вертикального перемещения и установленную перпендикулярно продольной оси автомобиля, при этом на направляющей с возможностью перемещения установлена каретка с двигателем, контактными шинами для подключения к линии энергоснабжения и лазерным локатором.
| АВТОМАТИЧЕСКИЙ ТОКОПРИЕМНИК ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОТЯГОЙ И НЕЗАВИСИМЫМ ИСТОЧНИКОМ ПИТАНИЯ | 2010 |
|
RU2421348C1 |
| Токоприемник троллейвоза | 1987 |
|
SU1546304A1 |
| Способ тушения стаей беспилотников высотного здания | 2024 |
|
RU2832728C1 |

