Предлагаемый токоприемник для линий энергоснабжения транспортных средств с электротягой и независимым источником энергии предназначен для автоматического присоединения транспортного средства к линии энергоснабжения или отключения от нее с переходом на питание от независимого источника в процессе движения без вмешательства водителя. Транспортным средством может являться, например, троллейбус, оснащенный независимым источником энергии, гибридный автомобиль или автобус.
Существующие токоприемники фактически жестко привязывают транспортные средства к линиям энергоснабжения. По этой причине затруднено маневрирование на дороге, например, троллейбусов или обгон движущегося другого троллейбуса или транспортного средства. Прохождение троллейбусом перекрестков и поворотов, развязок и пересечений с другими линиями энергоснабжения вызывает большие, а иногда непреодолимые трудности. По этим причинам не получают существенного развития троллейбусные внутригородские перевозки пассажиров несмотря на существенные их преимущества перед автобусами по экологической чистоте и экономии энергоносителей.
Например, в патенте USA 4.698.462 предлагается устройство на штангах троллейбуса для осуществления его обгона движущимся за ним троллейбусом. Одним из недостатков устройства является возможность обгона только при остановке одного из троллейбусов и отсутствие возможности маневрирования при обгоне других транспортных средств. В патенте ЕР 0989015 предлагается управляемый водителем механизм для присоединения токоприемника к линии энергоснабжения. Одним из недостатков является необходимость остановки троллейбуса для выполнения процедуры присоединения, сложность самой процедуры и участие в ней водителя.
В качестве наиболее близкого аналога предлагаемого изобретения рассматривается устройство, предложенное Иосифом Штейнбергом (TROLLEY - ELECTROMOBILE TRANSPORT AND ITS POWER SUPPLY SYSTEM
http://www.ntpo.eom/techno/techno2_1/7.shtml). В нем предлагается использовать троллейбус, оснащенный независимым источником энергии, для преодоления участков дороги, где линия энергоснабжения отсутствует.
К недостаткам устройства следует отнести:
- штанги токоприемника троллейбуса выполнены без возможности поворота их вокруг вертикальной оси, а их подъем и опускание происходит по команде водителя. По этой причине снижается безопасность вождения, т.к. водитель должен постоянно следить за тем, чтобы троллейбус находился точно под линией энергоснабжения и за ситуациями при маневрировании, когда нужно включать подъем или опускание штанг. По той же причине коридор движения троллейбуса под линией энергоснабжения ограничен шириной шины контакта токоприемника, что должно составлять не более 2 м.
- линия энергоснабжения устройства сложна и дорога, т.к. состоит из повторяющихся двух разнополярных участков проводов, разделенных изоляторами. Кроме того, она не совместима с уже существующими линиями энергоснабжения троллейбусов.
С учетом сказанного поставлена задача создания токоприемника с полной автоматизацией процесса присоединения и отсоединения от линии энергоснабжения в зависимости от взаимного расположения транспортного средства и линии энергоснабжения и возможности обгона транспортного средства, подключенного к линии энергоснабжения. Иными словами поставлена задача создания троллейбуса, обладающего свойствами городских автобусов при сохранении таких преимуществ троллейбуса, как экономичность, экологическая чистота и бесшумность.
Поставленная задача решается за счет использования лазерного локатора (далее лидар) для измерения расстояния между контактами токоприемника и проводами линии энергоснабжения, а также для измерения дистанции до движущегося впереди троллейбуса, а также до точки, где линия энергоснабжения прерывается. С помощью автоматического штангового манипулятора контактная панель токоприемника, в зависимости от ситуации на дороге, перемещается либо до осуществления контакта с линией энергоснабжения, либо переводится в нерабочее состояние. Управление манипулятором осуществляется с помощью бортового компьютера на основе информации, получаемой от лидара и датчиков углов поворота в сочленениях штангового манипулятора. Все это делает возможным, не прерывая движения троллейбуса, осуществлять маневры обгона любых транспортных средств и проезд участков дороги, где линия энергоснабжения отсутствует. При этом от водителя троллейбуса не требуется каких-либо действий, связанных с управлением токоприемником.
Особенности и преимущества изобретения станут более наглядными из описания предпочтительных вариантов реализации изобретения, данных исключительно в качестве примеров, со ссылкой на прилагаемые чертежи, где -
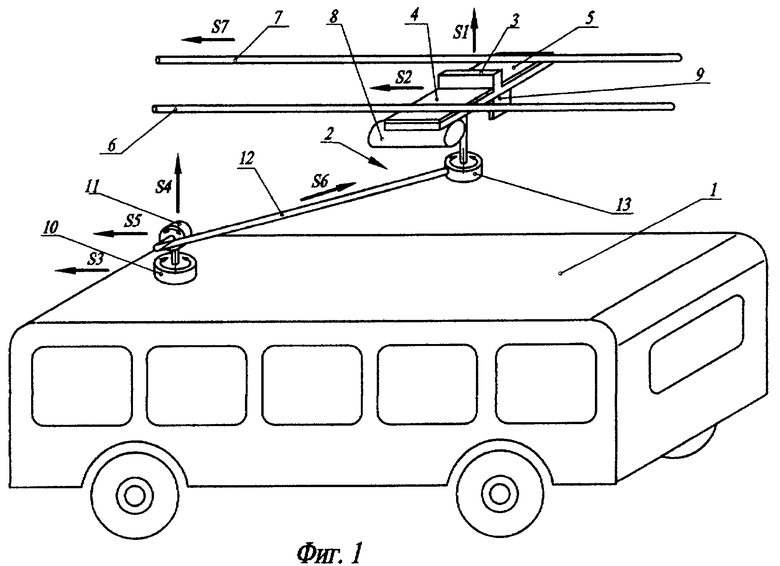
Фиг.1 схематически изображает механизм токоприемника.
Фиг.2 схематически изображена принципиальная схема лидара.
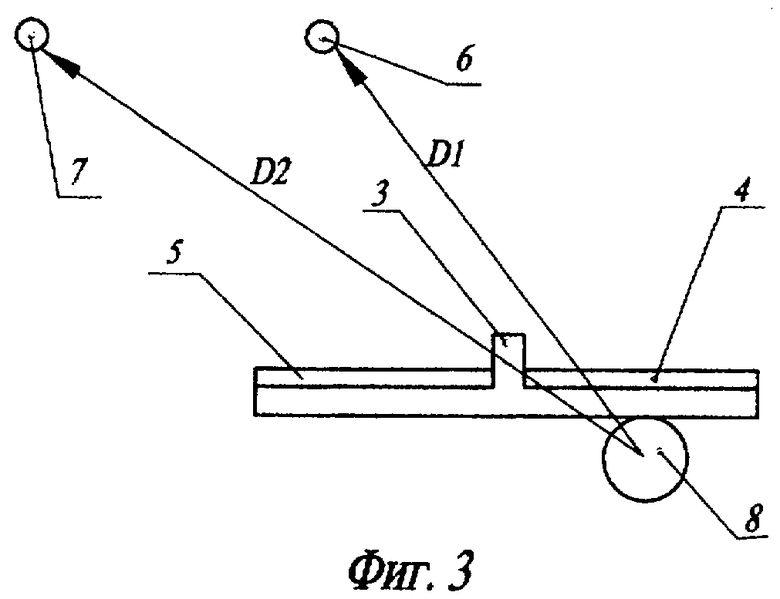
Фиг.3 схематически изображает взаимное положение проводов линии энергоснабжения и контактной панели перед началом ее установки в рабочее положение с помощь линейных перемещений.
Фиг.4 схематически изображает взаимное положение проводов и панели после выполнения манипулятором программы перемещения панели.
Фиг.5 схематически изображает взаимное расположение проводов и контактной панели перед началом ее угловой ориентации.
Фиг.6 схематически изображает взаимное расположение проводов и панели после завершения ориентации.
Осуществление изобретения возможно на основе использования обычных коммерческих лазерных дальномеров в качестве основного узла лидара. При этом необходимая дистанция измерений не превышает 50 м при точности измерений до 5 мм. Используемые в изобретении исполнительные двигатели с датчиками угла широко используются и к ним не предъявляется специфических требований так же, как и к бортовому компьютеру.
Рассматривается вариант применения токоприемника с троллейбусом, оснащенным аккумулятором в качестве независимого источника энергии, обеспечивающим возможность ограниченного автономного движения, хотя такой токоприемник может быть использован и с гибридными автобусами или автомобилями с электротягой и двигателем внутреннего сгорания.
Токоприемник (фиг.1) состоит из установленного на передней части крыши троллейбуса 1 штангового манипулятора 2, способного перемещать в вертикальной и горизонтальной плоскости контактную панель 3, а также поворачивать ее вокруг своей вертикальной оси S1. Контактная панель 3 включает две контактных шины 4 и 5, прижимаемые в рабочем состоянии к проводам 6 и 7 линии энергоснабжения соответственно. Кроме того, на корпусе контактной панели 3 установлен лидар 8 так, что его продольная ось параллельна поперечной оси S2 контактной панели 3 и расположена под центром контактной шины 4. При этом плоскость сканирования лидара 8 перпендикулярна оси S2 контактной панели 3. Также на корпусе контактной панели 3 закреплен отражатель 9 для луча лазера движущегося сзади троллейбуса.
Штанговый манипулятор 2 включает закрепленный на передней части крыши троллейбуса 1 исполнительный двигатель 10, установленный так, что его поперечная ось S3 совпадает с продольной осью троллейбуса 1. Он способен поворачивать вокруг своей вертикальной оси S4 закрепленный на его валу исполнительный двигатель 11, обеспечивая, тем самым, поворот в горизонтальной плоскости штанги 12, закрепленной на его горизонтальном валу. Двигатель 11 способен поворачивать в вертикальной плоскости закрепленную на его горизонтальном валу штангу 12.
На конце штанги 12 закреплен исполнительный двигатель 13 так, что ось его вала в рабочем состоянии токоприемника вертикальна. Вал двигателя 13 является последней деталью штангового манипулятора 2 и на нем закреплена контактная панель 3 так, что ось вала исполнительного двигателя 13 совпадает с осью S1 панели 3.
Конструктивно каждый из исполнительных двигателей 10, 11 и 13 содержит датчик угла поворота выходного вала. Датчик угла поворота вала исполнительного двигателя 10 показывает значение угла между его поперечной осью S3 и поперечной осью S5 двигателя 11, т.е. угол поворота штанги 12 в горизонтальной плоскости. Датчик угла поворота вала исполнительного двигателя 11 показывает значение угла между его поперечной осью S5 и продольной осью S6 штанги 12, т.е. угол ее поворота в вертикальной плоскости. Датчик угла исполнительного двигателя 13 показывает значение угла между его поперечной осью, параллельной оси S5, и поперечной осью S2 контактной панели 3. В рабочем состоянии токоприемника направление оси S2 должно совпадать с направлением S7 проводов 6 и 7 линии энергоснабжения.
В пассивном состоянии токоприемника штанга 12 опущена и располагается вдоль продольной оси S3 троллейбуса 1 так же, как и поперечная ось S2 контактной панели 3. При этом показания датчиков углов х исполнительных двигателей 10, 11 и 13 равны нулю.
В активном состоянии контактные шины 4 и 5 панели 3 прижаты к проводам 6 и 7 линии энергоснабжения. Поперечная ось S2 панели 3 параллельна направлению S7 проводов 6 и 7 линии энергоснабжения. Показания датчиков углов исполнительных двигателей 10, 11 и 13 определяются взаимным положением троллейбуса 1 и проводов 6 и 7 линии энергоснабжения.
Возможен вариант исполнения манипулятора 2, если масса штанги 12 достаточно велика. В этом случае вместо исполнительного двигателя 11 целесообразно использовать гидравлический исполнительный двигатель.
Лидар 8 (фиг.2) включает лазерный дальномер 14 с излучателем лазерного луча 15, ось которого параллельна поперечной оси S2 контактной панели 3, а также двигатель 16 с закрепленным на его валу зеркалом 17 с возможностью его вращения. Зеркало 17 наклонено под углом 45 дуг. град к оси S2 вала двигателя 16. При этом лидар 8 обеспечивает сканирование пространства в плоскости, перпендикулярной оси S2. На корпусе лидара 8 неподвижно закреплено полупрозрачное зеркало 18, отражающее часть энергии луча 15 лазера в сторону отражателя 9 на движущемся впереди троллейбусе, что позволяет определять дистанцию до него. Отраженный луч излучателя 15 поступает в приемник лазерного луча 19. Разница между временем излучения импульса лазерного луча и приема отраженного импульса позволяют определять расстояния D1, D2 и D3, соответственно, до проводов 6 и 7 линии энергоснабжения и отражателя 9 обгоняемого троллейбуса.
Возможен вариант исполнения лидара 8, когда электропомехи в зоне контактных шин 4 и 5 затрудняют работу дальномера 14. В этом случае электронная часть дальномера 14 может быть перемещена на достаточное расстояние от контактных шин 4 и 5, а световые импульсы могут подводиться к оптике лидара с помощью световода из оптического волокна (на фиг. не показаны).
В состав токоприемника входит также бортовой компьютер (на фиг. не показан), функцией которого является обработка информации, поступающей с датчиков угла исполнительных двигателей 10, 11 и 13 и лидара 8, а также формирование управляющих сигналов на исполнительные двигатели.
С помощью программ, задействованных в компьютере, также решаются следующие задачи:
- определение, какой из проводов линии энергоснабжения правый или левый, что необходимо для правильной установки контактной панели в рабочее положение. При этом используется информация об угловом положении отраженного от каждого из пары проводов лазерного луча. Угол отсчитывается от реперной риски, нанесенной на верхней точке прозрачного кожуха лидара 8, с учетом известной угловой скорости двигателя 16, вращающего зеркало 17.
- отсечение от входа компьютера большого объема создающей помехи информации, получаемой от лидара 8 и поступающей из сектора сканирования, где отсутствуют или находятся на слишком большом расстоянии провода 6 и 7 линии энергоснабжения. Этот сектор лежит за пределами зоны приблизительно от +70 до -70°, отсчитанных от реперной риски.
На борту троллейбуса 1 установлен аккумулятор или другой накопитель энергии, обеспечивающий энергией троллейбус, когда он отсоединяется от сети энергоснабжения.
Также на борту транспортного средства устанавливается система управления его рулевым механизмом с помощью компьютера, когда требуется обеспечить движение транспортного средства по направляемой траектории (об этом ниже).
Работа устройства происходит следующим образом.
Когда провода 6 и 7 линии энергоснабжения попадают в зону обнаружения лидара 8, он определяет расстояние D1 до провода 6 и D2 до провода 7 (фиг.3). Если это расстояние не превосходит максимально допустимого удаления троллейбуса 1 от линии энергоснабжения, то компьютером формируются сигналы на все три исполнительных двигателя 10, 11 и 13 с целью установки токоприемника в рабочее положение. При этом
- на исполнительный двигатель 10 подается сигнал от компьютера, приводящий к вращению в горизонтальной плоскости штанги 12 в направлении, когда дистанция D1 минимизируется. При этом центральная точка контактной шины 4 оказывается под проводом 6 (фиг.4).
- подается управляющий сигнал на исполнительный двигатель 11, поворачивающий в вертикальной плоскости штангу 12 в положение, при котором контактная панель 3 поднимается и контактные шины 4 и 5 входят в соприкосновение с проводами линии энергоснабжения 6 и 7 (фиг.1).
- на исполнительный двигатель 13 одновременно подается сигнал, вращающий вокруг вертикальной оси S1 контактную панель 3 в направлении, когда дистанция D2 минимизируется (фиг.5). В этом положении поперечная ось S2 контактной панели 3 становится параллельной направлению S7 линии энергоснабжения (Фиг.6).
- в процессе движения троллейбуса 1 поддерживается постоянная минимизация дистанций D1 и D2.
Автоматическое корректирование углового положения и поперечного смещения контактной панели 3 относительно проводов 6 и 7 в процессе движения создает условия для предельного расширения коридора движения троллейбуса. Он достигает размера двух штанг, т.е. примерно 10 м, т.к. предельный угол между штангой 12 и линией энергоснабжения может приближаться к 90 дуг. град. Это обеспечивает свободу перемещения троллейбуса по трем соседним полосам движения шоссе без необходимости отсоединения штанги от линии энергоснабжения.
Автоматическое возвращение токоприемника троллейбуса в исходное состояние, с одновременным переключением последнего на снабжение от аккумулятора, производится в следующих случаях:
- маневрирование троллейбуса, при котором троллейбус 1 удаляется от линии энергоснабжения на расстояние, превосходящее предельно допустимое. Указанное расстояние определяется предельно допустимой величиной показаний датчика угла двигателя 10,
- опасное сближение с движущимся впереди троллейбусом, когда расстояние D3 до отражателя 9, установленного на нем, становится меньше допустимого,
- приближение к концу участка линии энергоснабжения, где на ее опоре устанавливается отражатель, подобный отражателю 9.
Для возвращения в исходное состояние токоприемника на исполнительные двигатели 10, 11 и 13 подаются сигналы, приводящие показания их датчиков угла к нулю.
Использование в предлагаемом изобретении возможностей лидара в определении расстояний между контактными шинами контактной панели и проводами линии энергоснабжения позволяет:
- автоматически присоединять и отсоединять от линии энергоснабжения транспортное средство в зависимости от их взаимного расположения в процессе движения без участия водителя,
- автоматически отсоединять транспортное средство от линии энергоснабжения при выполнении обгона присоединенного к ней другого транспортного средства,
- устранить соскальзывание с линии энергоснабжения контактной панели токоприемника за счет постоянной корректировки ее положения и ориентации относительно линии энергоснабжения,
- использовать уже существующие линии энергоснабжения,
- упростить и удешевить линию энергоснабжения за счет возможности исключения из нее сложных участков, как то на перекрестках, поворотах и т.д., которые троллейбус преодолевает в автономном режиме,
- освободить водителя от функции управления токоприемником в процессе движения транспортного средства, что увеличивает безопасность движения и снижает нагрузку на водителя.
Предлагаемое изобретение может быть использовано для организации движения транспортного средства по направляемой траектории (шпуртроллейбус), определяемой расположением воздушной линии энергоснабжения. В этом случае управление направлением движения транспортного средства осуществляется компьютером, входными сигналами которого являются показания датчиков углов исполнительных двигателей 10 и 13, а выходной сигнал подается на рулевой механизм транспортного средства. При этом показания датчика угла двигателя 13 определяются горизонтальным смещением точки закрепления манипулятора 12 на крыше транспортного средства относительно линии энергоснабжения, а показания датчика угла 11 определяются отклонением вектора движения транспортного средства от направления линии энергоснабжения.
В случае подобного использования транспортного средства легко реализуется возможность формирования поездов из нескольких аналогичных транспортных средств, соединенных механической или основанной на электронике сцепкой.
Предлагаемое изобретение может быть использовано в случаях отсутствия автоматики, когда транспортное средство снабжено механизмами подъема и опускания штанги токоприемника, управляемыми водителем со своего рабочего места. При этом вместо компьютера используется монитор, с помощью которого водитель может получать информацию о взаимном расположении штанги токоприемника троллейбуса и линии энергоснабжения для ручного управления штангой.
Получаемые в предлагаемом изобретении преимущества создают предпосылки для замены в городском пассажирском транспорте автобусов на троллейбусы, т.к. последние приобретают присущую автобусам свободу маневрирования и сохраняют все преимущества троллейбусов, такие как экологическая чистота, экономичность и малая шумность.
Специалисты в данной области легко найдут, что различные конфигурации и модификации применимы к вышеприведенным примерам реализации изобретения без отклонений от его сути, сформулированной в предлагаемых пунктах формулы и определяемой ими.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ И СНАБЖЕНИЯ ЭЛЕКТРОЭНЕРГИЕЙ ПОЕЗДОВ ИЗ НАЗЕМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569205C2 |
| КОМПАКТНЫЙ АВТОМАТИЧЕСКИЙ ТОКОПРИЕМНИК ДЛЯ ГРУЗОВЫХ ГИБРИДНЫХ АВТОМОБИЛЕЙ | 2013 |
|
RU2565162C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ПОДСОЕДИНЕНИЯ И ОТСОЕДИНЕНИЯ ВО ВРЕМЯ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ПИТАНИЕМ ОТ ВОЗДУШНОЙ КОНТАКТНОЙ СЕТИ | 2011 |
|
RU2561643C2 |
| ПРИВОД ШТАНГОВЫХ ТОКОПРИЕМНИКОВ ТРОЛЛЕЙБУСА | 2018 |
|
RU2708147C1 |
| ЭКОБУС | 1997 |
|
RU2166440C2 |
| ГОРОДСКАЯ МАШИНА | 2013 |
|
RU2561188C2 |
| СИСТЕМА ЗАЩИТЫ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ ОТ САМОНАВОДЯЩИХСЯ И САМОПРИЦЕЛИВАЮЩИХСЯ ВЫСОКОТОЧНЫХ БОЕПРИПАСОВ НА МАРШЕ | 2021 |
|
RU2751260C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УЛАВЛИВАНИЯ ШТАНГ ТОКОПРИЕМНИКОВ ТРОЛЛЕЙБУСА | 2001 |
|
RU2209143C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ТОКОСЪЕМНИКА | 2014 |
|
RU2638887C2 |
| Система управления штангой токоприемника электротранспорта | 2019 |
|
RU2717109C1 |




Изобретение относится к средствам энергоснабжения транспортных средств с электротягой и независимым источником энергии. Предназначено для автоматического присоединения транспортного средства к линии энергоснабжения или отключения от нее в процессе движения и без вмешательства водителя. В предложенном токоприемнике используется лазерный локатор, закрепленный на контактной панели, предназначенный для измерения расстояния между контактами токоприемника и проводами линии энергоснабжения. С помощью автоматического штангового манипулятора, закрепленного на крыше транспортного средства, контактная панель токоприемника, в зависимости от ситуации на дороге, перемещается либо до осуществления контакта с линией энергоснабжения, либо переводится в нерабочее состояние. Управление манипулятором, а также транспортным средством в случае его движения по направляемой траектории, осуществляется с помощью бортового компьютера на основе информации, получаемой от локатора и датчиков углов поворота в сочленениях штангового манипулятора. Технический результат заключается в обеспечении транспортному средству с токоприемником свободы маневрирования и упрощении управления движением по направленной траектории. 4 з.п. ф-лы, 6 ил.
1. Автоматический токоприемник для транспортных средств с электротягой и автономным источником энергии, отличающийся тем, что, с целью полной автоматизации процесса присоединения и отсоединения от линии энергоснабжения и управления транспортным средством, включает контактную панель с закрепленными на ней контактными шинами, локатором для измерения расстояния до проводов линии энергоснабжения и движущегося впереди транспортного средства, и отражателем луча локатора движущегося сзади транспортного средства; закрепленный на транспортном средстве манипулятор для перемещения контактной панели до получения контакта между ней и проводами линии энергоснабжения, а также систему управления манипулятором и транспортным средством.
2. Автоматический токоприемник для транспортных средств с электротягой и автономным источником энергоснабжения по п.1, отличающийся тем, что в качестве локатора для повышения его разрешающей способности используется лазерный локатор (лидар), включающий излучатель лазерного луча, приемник отраженного луча, вращающееся наклоненное относительно луча зеркало, полупрозрачное, наклоненное зеркало, закрепленное на корпусе лидара, причем излучатель и вращающееся наклоненное зеркало установлены в корпусе таким образом, что плоскость сканирования луча лазера перпендикулярна поперечной оси контактной панели, а неподвижное зеркало отражает луч в сторону движущегося впереди троллейбуса, при этом корпус лидара прозрачен для лазерного луча.
3. Автоматический токоприемник для транспортных средств с электротягой и автономным источником энергоснабжения по п.1, отличающийся тем, что в качестве манипулятора используется штанговый манипулятор, включающий двигатель перемещения контактной панели в горизонтальной плоскости, установленный на крыше транспортного средства, исполнительный двигатель перемещения контактной панели в вертикальной плоскости, закрепленный на вертикальном валу исполнительного двигателя перемещения контактной панели в горизонтальной плоскости, и исполнительный двигатель углового поворота контактной панели вокруг вертикальной оси, соединенный штангой с горизонтальным валом исполнительного двигателя перемещения контактной панели в горизонтальной плоскости.
4. Автоматический токоприемник для транспортных средств с электротягой и автономным источником энергоснабжения по п.1, отличающийся тем, что в качестве системы управления манипулятором используется бортовой компьютер, формирующий сигналы управления исполнительными двигателями на основе информации, получаемой от лидара и датчиков углов поворота исполнительных двигателей.
5. Автоматический токоприемник для транспортных средств с электротягой и автономным источником энергоснабжения по п.1, отличающийся тем, что, с целью создания способности к движению транспортного средства по траектории, определяемой направлением линии энергоснабжения, используется информация с датчиков углов в сочленениях манипулятора, обработанных бортовым компьютером, для воздействия на рулевой механизм транспортного средства.
| Токоприемник транспортного средства | 1987 |
|
SU1445995A1 |
| ТОКОСЪЕМНИК ТРОЛЛЕЙБУСА | 2002 |
|
RU2235651C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ВЫРЕЗКИ СЕРДЦЕВИНЫИЗ ОВОЩЕЙ | 0 |
|
SU188287A1 |
| US 4698462 A, 06.10.1987. | |||

