Изобретение относится к области комплексных навигационных систем, систем управления и наведения объектов боевого назначения.
Известны методы измерения и калибровки датчиков таких воздушно-скоростных параметров, как воздушная скорость, абсолютная барометрическая высота, углы атаки и скольжения.
Некоторые из них приведены в учебном пособии И.М. Пашковского, В.А. Леонова, Б.К. Поплавского «Летные испытания самолетов и обработка результатов испытаний», Москва, «Машиностроение», 1985 [1] (стр. 138-153).
В частности, в [1] представлены два метода калибровки приемника воздушного давления (ПВД), а именно:
- метод калибровки по скорости;
- барометрический метод калибровки (стр. 146-147),
а также методы предварительной калибровки датчика углов атаки и скольжения (ДУАС) и последующего формирования истинных углов атаки и скольжения самолета (стр. 152-153).
Основным недостатком, присущим всем перечисленным методам, основанным на предварительной калибровке ПВД, системы воздушных сигналов (СВС) и ДУАС и последующем формировании всего массива текущей воздушно-скоростной информации является использование сугубо индивидуального, несистемного подхода ее формирования, не предполагающего проведения совместной обработки всего многообразия имеющейся на борту текущей навигационной, пилотажной и первичной воздушно-скоростной информации. Следствием такого подхода является неприемлемая точность измерения рассматриваемых параметров при их динамичном изменении в условиях маневренного полета, включая и режим малых скоростей.
В монографии В.П. Селезнева «Навигационные устройства», Москва, «Машиностроение», 1974 [2] (стр. 266-278, 545-551) представлен способ формирования воздушно-скоростных параметров, основанный на совместной обработке навигационной и пилотажной информации и предполагающий реализацию элементов комплексной обработки измеряемых СВС и ДУАС модуля воздушной скорости и углов его текущей ориентации относительно связанной с объектом системы координат (ССК) Oxyz, аналитически формируемого модуля скорости ветра и неизвестных, подлежащих оцениванию, углов его пространственной ориентации относительно горизонтированной системы координат (ГСК) Охгугzг объекта, а также измеряемых в режиме инерциально-допплеровской коррекции текущих углов истинного курса, крена и тангажа объекта, составляющих и модуля его путевой скорости и углов его ориентации относительно ГСК, по результатам проведения которой формируют полный перечень воздушно-скоростной информации.
По своей технической сути указанный способ формирования воздушно-скоростных информации может быть принят в качестве наиболее близкого аналога предлагаемого решения.
Его основными недостатками являются:
1. Отсутствие математического описания геометрии относительного размещения на объекте ПВД из состава СВС и инерциальной системы и, как следствие, неучет кинематической разницы путевой скорости, измеряемой ИНС в месте ее штатного размещения и ее текущего значения в месте размещения ПВД, используемой как для математически корректного описания составляющих и модуля воздушной скорости, так и для формирования адекватных и физически обоснованных уравнений связи воздушно-скоростных и инерциальных параметров для общего случая маневренного полета и пространственной модели ветра.
2. Отсутствие системного математического описания всего перечня воздушно-скоростных параметров и характера изменения ошибок их измерения, необходимых как для эффективного оценивания и коррекции первично измеренной воздушно-скоростной информации, так и для ее восстановления в режиме малых скоростей и висения.
3. Использование в предлагаемом решении отсутствующего в прототипе приема формирования адекватных и физически обоснованных уравнений связи является достаточно эффективным инструментом при синтезе процедур оптимального оценивания, позволяет достаточно просто получить соответствующие выражения для входных сигналов оптимального фильтра-идентификатора, определить вид матрицы его наблюдения и автоматизировать процедуру учета всех составляющих ошибок, входящих в сигналы измерения.
Техническим результатом изобретения является расширение функциональных возможностей современной авиационной техники и повышение точности и эффективности ее боевого применения во всех условиях эксплуатации.
Указанный технический результат достигается за счет того, что в способе формирования воздушно-скоростных параметров маневренного объекта, основанном на совместной обработке первичной воздушно-скоростной информации, включающей измеряемые системой воздушных сигналов (СВС) и датчиком углов атаки и скольжения (ДУАС) текущие значения модуля воздушной скорости V и углов атаки α и скольжения β его ориентации относительно связанной с объектом системы координат (ССК) Oxyz, текущее расчетное значение модуля u скорости ветра и неизвестные, подлежащие оцениванию, функциональные параметры cosΔψB, sinΔψB, αB его пространственной ориентации относительно горизонтированной системы координат (ГСК) OxГуГzГ объекта, и формируемых по результатам инерциально-доплеровской коррекции углов истинного курса ψи, крена γ и тангажа υ объекта, составляющих  и модуля
и модуля  его путевой скорости с определяющими его текущую пространственную ориентацию относительно ГСК OxГyГzГ объекта расчетными значениями углов сноса αСН и наклона траектории αНТ, по результатам которой формируют полный массив воздушно-скоростной информации, дополнительно используемую модель ошибок воздушно-скоростных параметров расширяют за счет включения в нее математического описания координат Δn, Δh, Δе размещения (на объекте) приемника воздушного давления (ПВД) относительно инерциальной навигационной системы (ИНС), которое представляют в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси географического сопровождающего трехгранника (ГСТ) ONHE, чем обеспечивают корректное формирование системы из трех физически обоснованных и математически строгих уравнений связи, на основе которых получают расчетные выражения для входных сигналов z1, z2, z3 оптимального фильтра-идентификатора воздушно-скоростных параметров и элементов hij его матрицы наблюдения, реализуя замкнутую, встроенную в структуру оптимального оценивания процедуру автоматического учета кинематической разницы путевой скорости, измеряемой комплексной инерциально-доплеровской системой в месте размещения ИНС и ее значением, соответствующим месту установки ПВД, кардинально сужая круг возможных причин расходимости процедуры оптимального оценивания воздушно-скоростных параметров в штатных для СВС и ДУАС режимах маневренного полета, дополнительно, при формировании воздушно-скоростных уравнений связи используют прием замены идеальных значений xj воздушно-скоростных параметров их физически адекватным представлением вида
его путевой скорости с определяющими его текущую пространственную ориентацию относительно ГСК OxГyГzГ объекта расчетными значениями углов сноса αСН и наклона траектории αНТ, по результатам которой формируют полный массив воздушно-скоростной информации, дополнительно используемую модель ошибок воздушно-скоростных параметров расширяют за счет включения в нее математического описания координат Δn, Δh, Δе размещения (на объекте) приемника воздушного давления (ПВД) относительно инерциальной навигационной системы (ИНС), которое представляют в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси географического сопровождающего трехгранника (ГСТ) ONHE, чем обеспечивают корректное формирование системы из трех физически обоснованных и математически строгих уравнений связи, на основе которых получают расчетные выражения для входных сигналов z1, z2, z3 оптимального фильтра-идентификатора воздушно-скоростных параметров и элементов hij его матрицы наблюдения, реализуя замкнутую, встроенную в структуру оптимального оценивания процедуру автоматического учета кинематической разницы путевой скорости, измеряемой комплексной инерциально-доплеровской системой в месте размещения ИНС и ее значением, соответствующим месту установки ПВД, кардинально сужая круг возможных причин расходимости процедуры оптимального оценивания воздушно-скоростных параметров в штатных для СВС и ДУАС режимах маневренного полета, дополнительно, при формировании воздушно-скоростных уравнений связи используют прием замены идеальных значений xj воздушно-скоростных параметров их физически адекватным представлением вида  и после переформатирования полученных уравнений связи приводят их к виду, удобному для формирования сигналов измерения zi и элементов hij (i=1-3, у=1-13) матрицы наблюдения, для которых характерно построчное выполнение равенств вида
и после переформатирования полученных уравнений связи приводят их к виду, удобному для формирования сигналов измерения zi и элементов hij (i=1-3, у=1-13) матрицы наблюдения, для которых характерно построчное выполнение равенств вида 
 а при математическом описании ошибок измерения воздушно-скоростных параметров, типа ΔV, Δα, Δβ, используют легко реализуемые и подкрепленные опытными данными модели, которые, в совокупности с моделью, описывающей характер изменения пространственной ориентации скорости ветра, обеспечивают гарантированную наблюдаемость, быстродействие и точность оптимального оценивания всех воздушно-скоростных параметров в штатных для СВС и ДУАС режимах маневренного полета, при этом, измеряемую ИНС навигационную и пилотажную информацию формируют в процессе и по результатам инерциально-доплеровского оценивания, при реализации которого традиционную для ИНС модель ошибок расширяют за счет включения в нее дифференциальных уравнений, описывающих характер изменения координат Δξ, Δη, Δζ, размещения ИНС относительно доплеровского измерителя составляющих скорости (ДИСС) в проекциях на оси опорного трехгранника гироплатформы ИНС Оξηζ, чем обеспечивают математически строгое описание комплексной инерциально-доплеровской системы, и устраняя одну из основных причин расходимости ее фильтра в маневренном полете, достигают повышенные характеристики точности оценивания ошибок ИНС и коррекции ее выходной информации, при реализации которой, также, как и при синтезе самой процедуры оптимального инерциально-доплеровского оценивания, основанной на комплексной обработке счисленных ИНС горизонтальных составляющих Vx, Vy абсолютной линейной скорости объекта, географической широты
а при математическом описании ошибок измерения воздушно-скоростных параметров, типа ΔV, Δα, Δβ, используют легко реализуемые и подкрепленные опытными данными модели, которые, в совокупности с моделью, описывающей характер изменения пространственной ориентации скорости ветра, обеспечивают гарантированную наблюдаемость, быстродействие и точность оптимального оценивания всех воздушно-скоростных параметров в штатных для СВС и ДУАС режимах маневренного полета, при этом, измеряемую ИНС навигационную и пилотажную информацию формируют в процессе и по результатам инерциально-доплеровского оценивания, при реализации которого традиционную для ИНС модель ошибок расширяют за счет включения в нее дифференциальных уравнений, описывающих характер изменения координат Δξ, Δη, Δζ, размещения ИНС относительно доплеровского измерителя составляющих скорости (ДИСС) в проекциях на оси опорного трехгранника гироплатформы ИНС Оξηζ, чем обеспечивают математически строгое описание комплексной инерциально-доплеровской системы, и устраняя одну из основных причин расходимости ее фильтра в маневренном полете, достигают повышенные характеристики точности оценивания ошибок ИНС и коррекции ее выходной информации, при реализации которой, также, как и при синтезе самой процедуры оптимального инерциально-доплеровского оценивания, основанной на комплексной обработке счисленных ИНС горизонтальных составляющих Vx, Vy абсолютной линейной скорости объекта, географической широты  его текущего местоположения, угла
его текущего местоположения, угла  азимутальной ориентации опорного трехгранника Оξηζ ее гироплатформы, измеренных углов гироскопического курса
азимутальной ориентации опорного трехгранника Оξηζ ее гироплатформы, измеренных углов гироскопического курса  крена
крена  и тангажа
и тангажа  объекта, и доплеровских составляющих
объекта, и доплеровских составляющих  путевой скорости, вместо идеальных значений инерциальных параметров xj используют их адекватное представление вида
путевой скорости, вместо идеальных значений инерциальных параметров xj используют их адекватное представление вида  и кинематические соотношения связи ошибок основной тройки навигационных
и кинематические соотношения связи ошибок основной тройки навигационных 
 и пилотажных
и пилотажных 

 параметров с малыми углами αх, αу, αz рассогласования реального и опорного трехгранников гироплатформы ИНС, а сравнивая счисленные ИНС горизонтальные составляющие Vx, Vy абсолютной линейной скорости и аналогичные комплексные компоненты
параметров с малыми углами αх, αу, αz рассогласования реального и опорного трехгранников гироплатформы ИНС, а сравнивая счисленные ИНС горизонтальные составляющие Vx, Vy абсолютной линейной скорости и аналогичные комплексные компоненты 
 абсолютной скорости, получают скоростные инерциально-доплеровские уравнения связи, из которых в функции измеренных навигационных и пилотажных параметров ИНС, формируют расчетные выражения для входных сигналов фильтра-идентификатора и элементов его матрицы наблюдения, чем обеспечивают синтез математически замкнутой, унифицированной процедуры автоматического, встроенного в структуру оптимального оценивания, учета ошибок счисления/измерения навигационной и пилотажной информации и ее эффективной коррекции как в процессе оптимального оценивания ошибок ИНС, так и по результатам прогноза, при этом восстановление полного массива воздушно-скоростной информации в режиме малых скоростей и висения осуществляют при справедливости гипотезы о стационарности скорости ветра и реализуют посредством решения обратной задачи пространственного треугольника скоростей.
абсолютной скорости, получают скоростные инерциально-доплеровские уравнения связи, из которых в функции измеренных навигационных и пилотажных параметров ИНС, формируют расчетные выражения для входных сигналов фильтра-идентификатора и элементов его матрицы наблюдения, чем обеспечивают синтез математически замкнутой, унифицированной процедуры автоматического, встроенного в структуру оптимального оценивания, учета ошибок счисления/измерения навигационной и пилотажной информации и ее эффективной коррекции как в процессе оптимального оценивания ошибок ИНС, так и по результатам прогноза, при этом восстановление полного массива воздушно-скоростной информации в режиме малых скоростей и висения осуществляют при справедливости гипотезы о стационарности скорости ветра и реализуют посредством решения обратной задачи пространственного треугольника скоростей.
Приведем перечень и описание фигур, которые потребуются при осуществлении предлагаемого изобретения.
На фиг. 1 приведена взаимная ориентация географического сопрвождающего трехгранника (ГСТ) ONHE и горизонтированной системы координат (ГСК) OxГyГzГ объекта.
Их рассогласование определяется углом истинного курса ψ объекта.
Переход от осей ГСТ ONHE к осям ГСК OxГyГzГ осуществляется посредством поворота на угол ψ с угловой скоростью 
Приведенное на фиг. 1 направление отсчета угла ψ и угловой скорости  является положительным.
является положительным.
На фиг. 2 приведена взаимная ориентация ГСК OxГyГzГ и связанной с объектом системы координат (ССК) Oxyz.
Их рассогласование определяется углами тангажа υ и крена γ объекта.
Переход от осей ГСК OxГyГzГ к осям Oxyz осуществляется посредством двух последовательных поворотов на углы υ и γ с угловыми скоростями  и
и  соответственно.
соответственно.
Приведенное на фиг. 2 направление отсчета углов υ и γ и угловых скоростей и является положительным.
На фиг. 3 приведена взаимная ориентация ГСК OxГyГzГ и траекторией системы координат (ТСК) OxTyTzT. Их рассогласование определяется углами сноса αСН и наклона траектории αНТ.
Переход от осей ГСК OxГyГzГ к осям ТСК OxГyГzГ осуществляется посредством двух последовательных поворотов на углы αСН и αНТ с угловыми скоростями  и
и  соответственно.
соответственно.
Приведенное на фиг. 3 направление отсчета углов αСН и αНТ и угловых скоростей  и
и  является положительным.
является положительным.
Дополнительно следует отметить, что с осью OxT ТСК связан вектор  путевой скорости объекта.
путевой скорости объекта.
На фиг. 4 приведена взаимная ориентация скоростной системы координат СкСК OxCyCzC и ССК Oxyz.
Рассогласование указанных систем координат определяется углами скольжения β и атаки α.
Переход от осей СкСК OxCyCzC к осям ССК Oxyz осуществляется посредством двух последовательных поворотов на углы β и α с угловыми скоростями  и
и  соответственно.
соответственно.
Приведенное на фиг. 4 направление отсчета углов β и α и угловых скоростей  и
и  является положительным.
является положительным.
С осью ОхС СкСК связан вектор  воздушной скорости объекта.
воздушной скорости объекта.
На фиг. 5 приведена взаимная ориентация ГСК OxГyГzГ и системы координат, связанной с вектором  скорости ветра (ВСК) OxByBzB.
скорости ветра (ВСК) OxByBzB.
Рассогласование указанных систем координат определяется курсовым углом вектора скорости ветра ψB и вертикальным углом его наклона αB к плоскости горизонта OxГzГ.
Переход от осей ГСК OxГyГzГ к осям ВСК OxByBzB осуществляется посредством двух последовательных поворотов на углы ψB и αB с угловыми скоростями  и
и  соответственно.
соответственно.
Приведенное на фиг. 5 направление отсчета углов ψB и αB и угловых скоростей  и
и  является положительным.
является положительным.
Вектор скорости ветра связан с осью OxB ВСК OxByBzB.
На фиг. 6 приведен пространственный треугольник скоростей, сторонами которого являются вектор  воздушной скорости, вектор
воздушной скорости, вектор  путевой скорости объекта и вектор
путевой скорости объекта и вектор  скорости ветра. Для указанного треугольника скоростей справедливы векторные выражения вида:
скорости ветра. Для указанного треугольника скоростей справедливы векторные выражения вида:

На фиг. 6 приняты следующие обозначения для углов между векторами 



Приведенное выше 1-ое векторное выражение соответствует определению воздушной скорости, 2-ое является следствием 1-го.
На фиг. 7 приведена взаимная ориентация ГСТ ONHE и ОТГП ИНС Оξηζ.
Переход от осей ГСТ ONHE к осям ОТГП ИНС Oξηζ осуществляется посредством поворота на угол χ азимутальной ориентации ОТГП ИНС.
Приведенное на фиг. 7 направление отсчета угла χ и угловой скорости  является положительным.
является положительным.
На фиг. 8 приведена взаимная ориентация ОТГП ИНС Oξηζ ССК Oxyz.
Их рассогласование определяется углами гироскопического курса ψг, тангажа υ и крена γ объекта.
Переход от осей ОТГП Oξηζ к осям ССК Oxyz осуществляется посредством трех последовательных поворотов на углы ψг, υ и γ с угловыми скоростями  соответственно.
соответственно.
Приведенное на фиг. 8 направление отсчета углов ψг, υ и γ и угловых скоростей  является положительным.
является положительным.
С целью раскрытия физической и математической сути предлагаемого способа формирования воздушно-скоростных параметров приведем прямые и обратные векторно-матричные преобразования, связывающие представленные на фиг. 1-5, 7, 8 системы координат, и вид определяющих их матриц.
В соответствии с фиг. 1, векторно-матричные выражения, связывающие компоненты произвольного вектора в проекциях на оси ГСК OxГyГzГ и ГСТ ONHE имеют следующий вид:

Матрица Г преобразования (1), в соответствии с фиг. 1, равна:

Здесь и далее под «с» следует понимать косинус, а под «s» - синус соответствующего угла.
При этом матрица ГТ обратного преобразования (2), являющаяся транспонированной по отношению к матрице Г (3), будет равна:

Прямое и обратное преобразования, связывающие компоненты произвольного вектора в проекциях на оси ГСК OxГyГzГ и ССК Oxyz (фиг. 2), будут иметь следующий вид:

где матрица S и транспонированная ей матрица ST, в соответствии с фиг. 2, равны:

Аналогично, прямое и обратное векторно-матричные преобразования для компонент произвольного вектора в проекциях на оси ГСК OxГyГzГ и ТСК OxTyTzT (фиг. 3) будут иметь следующий вид:

где матрицы Т и ТТ, в соответствии с фиг. 3, будут равны:


Прямое и обратное векторно-матричные преобразования для компонент произвольного вектора в осях СкСК OxCyCzC и ССК Oxyz (фиг. 4) имеют следующий вид:

где матрицы С и СТ, в соответствии с фиг. 4, будут равны:

Для систем координат, приведенных на фиг. 5, прямое и обратное векторно-матричные преобразования для проекций произвольного вектора будут иметь следующий вид:

где матрица В и транспонированная матрица ВТ, в соответствии с фиг. 5, равны:


Представляется целесообразным курсовой угол ветра ψВ определять, как:

где ΔψВ - угол, определяющий направление скорости ветра относительно горизонтальной составляющей путевой скорости объекта.
Векторно-матричное выражение для расчета компонент произвольного вектора в проекциях на оси ССК Oxyz по известным его составляющим в осях ОТГП ИНС Оξηζ и обратное ему выражение имеют вид:

где матрица S0 и транспонированная ей матрица  , в соответствии с фиг. 8, будут равны:
, в соответствии с фиг. 8, будут равны:


Векторно-матричное выражение для расчета компонент произвольного вектора в проекциях на оси ОТГП ИНС Оξηζ, по известным его составляющим в проекциях на оси ГСТ ONHE и обратное ему выражение будут иметь вид:

где матрица G и транспонированная ей матрица GT, в соответствии с фиг. 7, равны:

После приведенного выше описания систем координат, определяющих ориентацию векторов воздушной  и путевой
и путевой  скорости объекта, а также скорости ветра , получим выражения для направляющих косинусов между рассматриваемыми векторами и тем самым определим косинусы углов δ1, δ2, δ3, пространственного треугольника скоростей (фиг. 6). Это достаточно просто можно сделать, предварительно получив соответствующие векторно-матричные соотношения между векторами
скорости объекта, а также скорости ветра , получим выражения для направляющих косинусов между рассматриваемыми векторами и тем самым определим косинусы углов δ1, δ2, δ3, пространственного треугольника скоростей (фиг. 6). Это достаточно просто можно сделать, предварительно получив соответствующие векторно-матричные соотношения между векторами 
Для этого, в векторно-матричное выражение (14) вместо вектора  подставим его значение, определяемое выражением (5). В результате получим следующее полезное соотношение:
подставим его значение, определяемое выражением (5). В результате получим следующее полезное соотношение:

Подставим в указанное выражение вместо вектора  его значение, определяемое векторно-матричным выражением (10). Получим искомое соотношение вида:
его значение, определяемое векторно-матричным выражением (10). Получим искомое соотношение вида:

Элемент первой строки и первого столбца матрицы CTSTT (23) определяет косинус угла между векторами  то есть сδ1.
то есть сδ1.
Если в полученное выше векторно-матричное выражение (22) вместо вектора  подставить его значение, определяемое выражением (18), получим 2-ое искомое соотношение:
подставить его значение, определяемое выражением (18), получим 2-ое искомое соотношение:

Элемент первой строки и первого столбца полученной матрицы CTSBT определяет косинус угла между векторами воздушной скорости  и скорости ветра
и скорости ветра  Косинус смежного с ним угла, который является внутренним углом пространственного треугольника скоростей, будет равен
Косинус смежного с ним угла, который является внутренним углом пространственного треугольника скоростей, будет равен 
Для получения 3-го векторно-матричного соотношения подставим в правую часть выражения (9) вместо вектора  его значение, определяемое выражением (18).
его значение, определяемое выражением (18).
В результате получим простое векторно-матричное соотношение, связывающее два вектора  Оно имеет вид:
Оно имеет вид:

Учитывая, что вектор путевой скорости  и вектор скорости ветра
и вектор скорости ветра  ориентированы соответственно вдоль осей OxT и OxB, следовательно, косинус угла между векторами путевой скорости
ориентированы соответственно вдоль осей OxT и OxB, следовательно, косинус угла между векторами путевой скорости  и скорости ветра
и скорости ветра  будет определяться элементом первой строки и первого столбца матрицы ТВТ.
будет определяться элементом первой строки и первого столбца матрицы ТВТ.
Раскрывая соответствующие элементы матриц векторно-матричных соотношений (23), (24), (25), получим искомые выражения для направляющих косинусов сδ1. cδ2, сδ3. Приведем их:

Анализ выражений (26) свидетельствует о том, что единственным углом, косинус которого, в штатном режиме полета может быть вычислен с точностью, определяемой ошибками измерения углов атаки и скольжения, является угол δ1 между векторами воздушной и путевой скорости (фиг. 6).
Поэтому в указанном режиме полета, когда измеряемая СВС и ДУАС информация достоверна и выдается с соответствующим признаком, выражение для сδ1 (26) может быть использовано по его прямому назначению для грубого расчета модуля скорости ветра 

где  и
и  - измеренные модули воздушной и приборной скорости.
- измеренные модули воздушной и приборной скорости.
Следует отметить, что указанный вывод справедлив для случая, когда ИНС функционирует в режиме инерциально-доплеровской коррекции.
При этом выражения для сδ2 и сδ3, после приближенного вычисления их текущих значений путем решения пространственного треугольника скоростей, можно было бы использовать в качестве уравнений связи при разработке процедуры оптимального оценивания и расчета воздушно-скоростных параметров.
Однако, учитывая, что перечень оцениваемых при этом параметров ограничен ошибками измерения углов атаки и скольжения и углами пространственной ориентации скорости ветра (26), представляется целесообразным вообще отказаться от их какого-либо дальнейшего использования.
Тем более, что помимо полученных выше выражений (26), важное теоретическое и практическое значение при разработке унифицированных математических процедур оптимального оценивания всего перечня ошибок воздушно-скоростных параметров имеют уравнения, которые могут быть получены посредством приведения составляющих воздушной скорости в связанных с объектом осях к осям скоростной системы координат.
Указанные уравнения, которые, в отличие от выражений (26), действительно, представляют из себя уравнения связи, в соответствии с фиг. 4, имеют вид:

Исключительно всегда, все физически обоснованные уравнения связи справедливы для идеальных значений входящих в них параметров.
Но идеальные значения ряда, представляющих интерес параметров, и, прежде всего, воздушно-скоростных, как правило, либо вообще неизвестны, либо известны их текущие, ошибочно измеренные значения  где под
где под  в рассматриваемом случае следует понимать измеренные СВС и ДУАС значения параметров
в рассматриваемом случае следует понимать измеренные СВС и ДУАС значения параметров 
При этом задача оптимального оценивания ставится так, чтобы ее решение сводилось к определению как текущих ошибок Δxj ошибочно измеренных сигналов  так и априори неизвестных параметров, определяющих ориентацию скорости ветра.
так и априори неизвестных параметров, определяющих ориентацию скорости ветра.
Формально, и те, и другие входят в перечень подлежащих оптимальному оцениванию параметров Δxj.
Математический прием, который позволяет решить указанную задачу, предполагает замену входящих в уравнение связи идеальных параметров xj их физически равноценными значениями вида 
После чего указанные уравнения связи переформатируют таким образом, чтобы в их правой части были сгруппированы члены, зависящие от измеряемых сигналов  а в левой - представленные в функции ошибок измерения Δxj и априори неизвестных параметров.
а в левой - представленные в функции ошибок измерения Δxj и априори неизвестных параметров.
Правые части указанных уравнений принимают за сигналы измерения zi, а левые - формально равные соответствующим сигналам измерения используют для определения элементов hij некоторой матрицы измерения, посредством которых осуществляют взвешивание ошибок Δxj измерения соответствующих параметров 
Очевидно, что при этом для каждого zi сумма Σj hijΔxj взвешенных значений должна быть равна соответствующему сигналу измерения zi.
При наличии адекватного и физически-обоснованного описания подлежащих оцениванию параметров Δxj, реализуют эффективную процедуру их оптимального оценивания.
В соответствии с представленной выше схемой, преобразуем приведенные уравнения связи (28) и, на их основе, получим выражения для расчета сигналов измерения zi и элементов hij (i=1-3, j=1-13) матрицы наблюдения.
Но прежде приведем удобные для практического использования выражения для составляющих Vx, Vy, Vz воздушной скорости в проекциях на оси ССК Oxyz.
При их формировании будем исходить из определения воздушной скорости, как скорости перемещения объекта относительно ветра.
Для этого получим полезные векторно-матричные соотношения, устанавливающие связь между проекциями произвольного вектора в осях ТСК OxT yT zT и ВСК OxB yB zB с его компонентами в осях ССК Oxyz
Указанные соотношения достаточно просто могут быть получены, если в векторно-матричное соотношение (5) вместо вектора  подставить его значения, определяемые векторно-матричными соотношениями (10) и (18).
подставить его значения, определяемые векторно-матричными соотношениями (10) и (18).
В результате получим:

Учитывая, что с продольными осями OxT ТСК и OxB ВСК связаны соответственно модуль  путевой скорости и модуль u скорости ветра, приведенные выше соотношения применительно к составляющим
путевой скорости и модуль u скорости ветра, приведенные выше соотношения применительно к составляющим  путевой скорости объекта и составляющим ux, uy, uz скорости ветра могут быть представлены в виде следующих векторно-матричных выражений:
путевой скорости объекта и составляющим ux, uy, uz скорости ветра могут быть представлены в виде следующих векторно-матричных выражений:

Раскрывая матрицы STT и SBT, находя значения элементов их 1-го столбца, получим следующие выражения для составляющих  путевой скорости объекта и составляющих ux, uy, uz скорости ветра:
путевой скорости объекта и составляющих ux, uy, uz скорости ветра:



Приведенные выражения (34) для составляющих  путевой скорости объекта далее будем рассматривать, как составляющие скорости, полученные по измерениям комплексной инерциально-доплеровской системы, которые соответствуют путевой скорости объекта в месте размещения ИНС. Используемый при этом модуль путевой скорости рассчитывают в соответствии с одним из выражений вида:
путевой скорости объекта далее будем рассматривать, как составляющие скорости, полученные по измерениям комплексной инерциально-доплеровской системы, которые соответствуют путевой скорости объекта в месте размещения ИНС. Используемый при этом модуль путевой скорости рассчитывают в соответствии с одним из выражений вида:


где 

 и
и 

 - составляющие путевой скорости объекта в проекциях соответственно на оси ГСТ ONHE или связанной с объектом системы координат ССК Oxyz (34).
- составляющие путевой скорости объекта в проекциях соответственно на оси ГСТ ONHE или связанной с объектом системы координат ССК Oxyz (34).
При этом расчет траекторных углов сноса αCH и наклона траектории αНТ, используемых в (34), осуществляют в соответствии со следующей цепочкой соотношений (см. фиг. 1, фиг. 3):

где  - составляющие путевой скорости объекта в проекциях на оси ГСК ОхГ уГ zГ; ψ - истинный курс объекта.
- составляющие путевой скорости объекта в проекциях на оси ГСК ОхГ уГ zГ; ψ - истинный курс объекта.
Учитывая, что для описания составляющих воздушной скорости, измеряемых СВС, необходимо знать составляющие путевой скорости объекта в месте установки приемника воздушного давления (ПВД) из состава СВС, приведем математическое описание кинематических составляющих скорости перемещения ПВД относительно ИНС в проекциях на оси ГСТ ONHE, имеющих место при угловых эволюциях объекта.
Указанные составляющие скорости однозначно определяются характером изменения координат Δn, Δh, Δе относительного размещения ПВД и ИНС.
Из простых физических соображений можно показать, что дифференциальные уравнения, описывающие характер изменения координат Δn, Δh, Δе относительного размещения ПВД и ИНС в проекциях на оси ГСТ ONHE имеют вид:

где  - составляющие угловой скорости объекта относительно ГСТ ONHE.
- составляющие угловой скорости объекта относительно ГСТ ONHE.
Правые части указанных уравнений (34.4) одновременно определяют искомые составляющие 
 кинематической скорости перемещения ПВД относительно ИНС, поскольку для них справедливы соотношения вида:
кинематической скорости перемещения ПВД относительно ИНС, поскольку для них справедливы соотношения вида:

Таким образом, расширяя модель, описывающую характер изменения ошибок измерения/расчета воздушно-скоростных параметров, включая в нее дифференциальные уравнения (34.4), получают возможность оценивания координат Δn, Δh, Δе размещения ПВД относительно ИНС и определения текущих значений составляющих (34.5) кинематической скорости ПВД и после их приведения к осям связанной с объектом системы координат ССК Oxyz формировать искомые составляющие  путевой скорости объекта в месте установки ПВД:
путевой скорости объекта в месте установки ПВД:

где составляющие 

 кинематической скорости относительного перемещения ПВД определяют в соответствии с векторно-матричным соотношением вида:
кинематической скорости относительного перемещения ПВД определяют в соответствии с векторно-матричным соотношением вида:

где используемые в (34.7) матрицы Г и S представлены выше (3) и (7).
Представляя (34.7) в скалярном виде, получим следующие выражения для 


После подстановки в (34.8) вместо 
 их значений, определяемых (34.5), (34.4), получим следующие развернутые выражения для
их значений, определяемых (34.5), (34.4), получим следующие развернутые выражения для 

Приводя в (34.9) подобные члены, группируя их по Δn, Δh, Δе, запишем выражения для  ,
,  ,
,  в следующем виде:
в следующем виде:

Запишем полученные выражения в более компактном виде, а именно:


В выражениях (34.11) приняты следующие обозначения:

Согласно определению, воздушная скорость - это скорость перемещения объекта относительно ветра.
Следовательно, находя разницу соответствующих составляющих путевой скорости объекта в месте установки ПВД (34.6) и скорости ветра (33), получим искомые выражения для составляющих воздушной скорости в проекциях на оси ССК Oxyz:

Подставим в (35) полученные выше выражения для составляющих скорости ветра (33) и путевой скорости (34.6) с учетом определяющих их компонент  (34) и
(34) и  (34.11). В результате получим следующую запись для составляющих Vx, Vy, Vz воздушной скорости в месте установки ПВД:
(34.11). В результате получим следующую запись для составляющих Vx, Vy, Vz воздушной скорости в месте установки ПВД:


Для случая малого значения параметра αB вертикального ветра и ψB=αCH+ΔψВ выражения (36) могут быть записаны в виде:

Условие малого значения угла вертикального ветра не следует расценивать, как нечто обязательное и сужающее область применения предлагаемого способа формирования воздушно-скоростных параметров, поскольку оно, в этом смысле, не является определяющим и может быть также легко отменено, так как оно всего лишь на единицу уменьшает порядок синтезируемой системы.
А то, что оно, якобы позволяет реализовать оптимальную фильтрацию и идентификацию в рамках линейной процедуры, то это, как будет показано ниже, абсолютно не так, поскольку нелинейность, типа произведения параметров состояния системы при определении элементов ее матрицы наблюдения, не исключается и, более того, не вызывает каких-либо вычислительных проблем при программной реализации рассматриваемого способа.
Учитывая, что описание предлагаемого способа ведется практически с «чистого листа», для того, чтобы обеспечить возможность последующей работы с ним, вывод и преобразования всех, особенно громоздких выражений, осуществляется максимально подробно, без каких-либо трудно отслеживаемых переходов. Это, как представляется, облегчит и его первое прочтение.
Последние выражения для Vx, Vy, Vz (37) после раскрытия в них с(αCH+ΔψB) и s(αCH+ΔψB) и приведший подобных членов, примут следующий вид:

Далее, полученные составляющие воздушной скорости (38) необходимо подставить в приведенные выше уравнения связи (28), принимая при этом:

где  - измеренные/рассчитанные значения углов атаки, скольжения, воздушной скорости и скорости ветра; Δα, Δβ, ΔV, Δu - ошибки измерения/расчета представленных выше параметров.
- измеренные/рассчитанные значения углов атаки, скольжения, воздушной скорости и скорости ветра; Δα, Δβ, ΔV, Δu - ошибки измерения/расчета представленных выше параметров.
Но прежде, запишем уравнения связи (28) в следующем промежуточном виде:
Пренебрегая в полученных уравнениях связи величинами 2-го порядка малости относительно Δα, Δβ приведем их в следующем виде:

Подставляя в полученные уравнения выражения (38) для составляющих воздушной скорости Vx, Vy, Vz с учетом соотношения для и (39), получим следующие развернутые уравнения связи. Указанные уравнения являются промежуточными и имеют вид:


Приведенные уравнения связи необходимо привести к виду, удобному для их использования по назначению, а именно, для формирования сигналов измерения или входных сигналов оптимального фильтра-идентификатора ошибок воздушно-скоростных параметров и определения элементов его матрицы наблюдения.
С этой целью, учитывая, что подлежащие оцениванию кинематические составляющие скорости и ошибка расчета модуля скорости ветра не превышают 1 м/с, а погрешности измерения углов атаки и скольжения в штатном режиме полета и работы СВС и ДУАС не превышают 2,5÷3,0 градусов, представляется целесообразным и обоснованным приведенные уравнения связи (42) записать с точностью до величин второго порядка малости относительно таких параметров состояния Δu, Δα, Δβ, sΔψB, сΔψB, αB. С этой целью изменим форму их аналитического представления и запишем в следующем виде:

где входящие в (43) компоненты Vix, Viy, Viz (i=1÷3), в соответствии с (42) и учтенными допущениями, имеют вид:
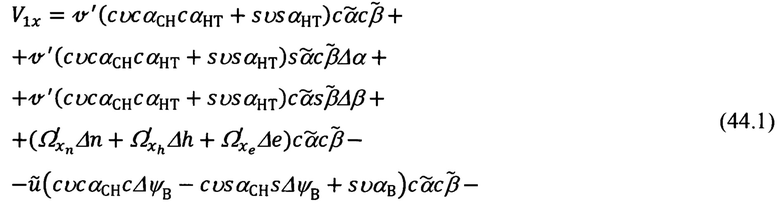



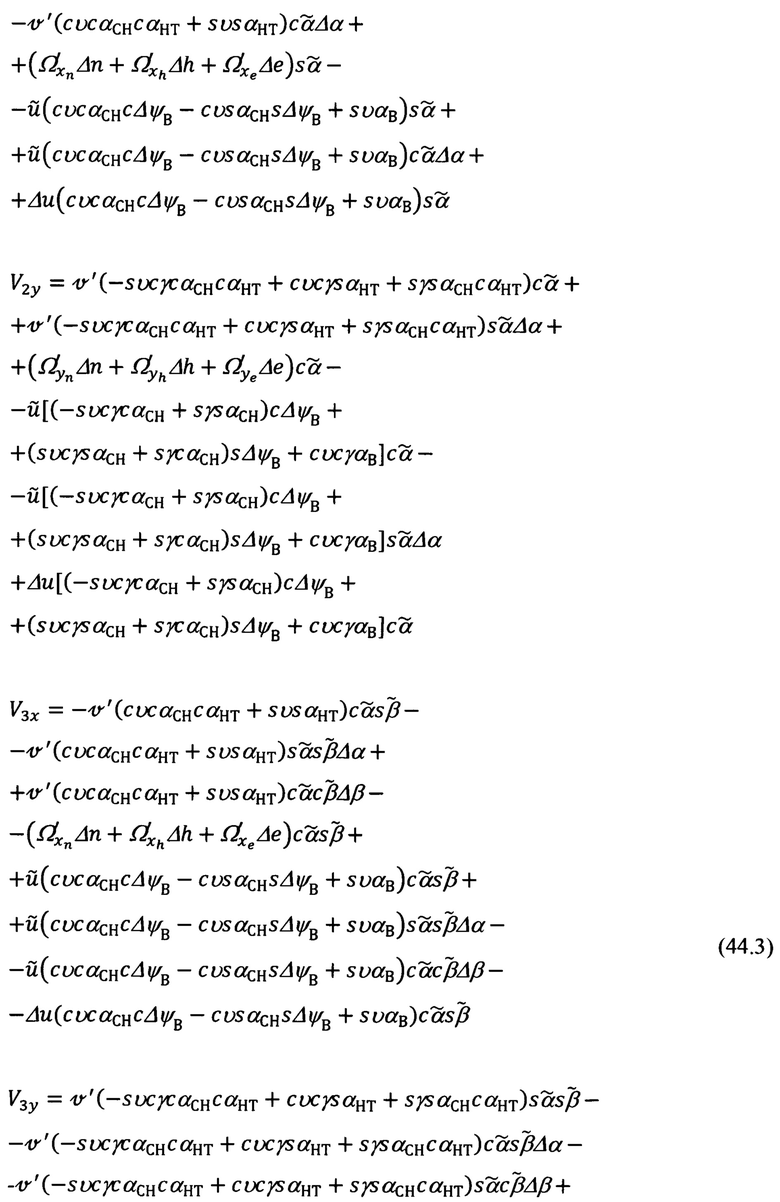

Приведенные выше уравнения связи (43) с учетом определяющих их математических блоков для Vix, Viy, Viz (i=1÷3) (44.1-44.3), в соответствии с традиционной схемой их дальнейшего преобразования, должны быть записаны так, чтобы в их правых частях были сгруппированы члены, не зависящие от подлежащих оцениванию параметров, вида ΔV, Δα, Δβ, Δu, sΔψB, cΔψB, αB, а в левых - все оставшиеся члены, то есть все, что представлено в функции перечисленных выше параметров состояния.
После чего, правые части указанных уравнений, которые определяются, исключительно, по измерениям СВС и ИНС в режиме ее инерциально-доплеровской коррекции, принимают за входные сигналы z1, z2, z3 оптимального фильтра-идентификатора ошибок воздушно-скоростных параметров, а по их левым частям - формируют соответствующие указанным сигналам измерения три строки матрицы наблюдения Н.
Учитывая громоздкость преобразований, предваряющих формирование сигналов измерения и матрицы наблюдения, запишем выражения для них без их проведения, на основании, исключительно, приведенных выше уравнений (43) и определяющих их математических блоков (44.1)-(44.3), но с обязательным учетом приведенных выше рекомендаций.
В соответствии с 1-м уравнением системы (43) и системой математических блоков (44.1), определяющих указанное уравнение, запишем расчетное выражения для сигнала измерения z1:

В соответствии со 2-м уравнением системы (43) и системой математических блоков (44.2), определяющих указанное уравнение, выражения для сигнала измерения z2 будет иметь следующий вид:

Выражение для расчета 3-го сигнала измерения z3, в соответствии с 3-м уравнением системы (43) и входящих в него математических блоков (44.3), будет иметь следующий вид:

Из приведенных выражений для входных сигналов оптимального идентификатора ошибок воздушно-скоростной информации следует, что все они сформированы по измерениям СВС, ДУАС и ИНС в режиме ее инерциально-доплеровской коррекции.
Именно по этой причине все параметры, сформированные по инерциальным измерениям, считаются идеальными, а всем сигналам, таким, как воздушная скорость  , углы атаки
, углы атаки  и скольжения
и скольжения  измеренным СВС и ДУАС, присущи ошибки ΔV, Δα, Δβ, которые подлежат их адекватному математическому описанию и оптимальному оцениванию. Указанные ошибки и, дополнительно, не входящие в явном виде в выражения (44.1), (44.2), (44.3) ошибка Δu расчетного значения скорости ветра
измеренным СВС и ДУАС, присущи ошибки ΔV, Δα, Δβ, которые подлежат их адекватному математическому описанию и оптимальному оцениванию. Указанные ошибки и, дополнительно, не входящие в явном виде в выражения (44.1), (44.2), (44.3) ошибка Δu расчетного значения скорости ветра  и неизвестные углы ΔψВ и αB его пространственной ориентации в совокупности с кинематическими погрешностями (34.11) определения путевой скорости объекта в месте установки ПВД, входят в левые части тех уравнений связи, которые выше не были приведены по причине громоздкости их представления.
и неизвестные углы ΔψВ и αB его пространственной ориентации в совокупности с кинематическими погрешностями (34.11) определения путевой скорости объекта в месте установки ПВД, входят в левые части тех уравнений связи, которые выше не были приведены по причине громоздкости их представления.
Обозначив правые части указанных уравнений связи через z1 (45.1), z2 (45.2), z3 (45.3), очевидно, что их левые части - это суть те же самые z1, z2, z3, но в функции подлежащих оцениванию параметров состояния системы, в перечень которых входят такие ошибки измерения/расчета воздушно-скоростных параметров, как ΔV, Δα, Δβ, Δu, sΔψB, cΔψB, αB, Δn, Δh, Δе.
Приведенный перечень будет уточнен после разработки полной математической модели, описывающей характер изменения указанных параметров.
Разработка указанной модели предполагает адекватное математическое описание характера изменения во времени всех, представленных выше параметров состояния. При этом, целесообразно исходить из опыта предыдущих разработок.
А опыт разработки, испытаний и эксплуатации оптико-электронных прицельно-навигационных комплексов (ОЭПрНК) современных объектов боевого назначения свидетельствует о том, что математическая модель, описывающая характер изменения погрешности ΔV измерения воздушной скорости  может быть представлена выражением вида:
может быть представлена выражением вида:

где:  - измеренное значение текущей воздушной скорости; ΔkV, ΔV0 - некоторые параметры, описываемые, как постоянные случайные величины:
- измеренное значение текущей воздушной скорости; ΔkV, ΔV0 - некоторые параметры, описываемые, как постоянные случайные величины:

Для определения текущей погрешности ΔV измерения воздушной скорости  параметры ΔkV и ΔV0 должны быть включены в перечень параметров состояния системы.
параметры ΔkV и ΔV0 должны быть включены в перечень параметров состояния системы.
Относительно практического использования измеренных ДУАС углов атаки  и скольжения
и скольжения  следует отметить, что на одном из объектов указанные углы перед их использованием для решения специальных задач предварительно «взвешивались» некоторыми коэффициентами, равными 0,8-0,85 для угла атаки и 0,6-0,65 для угла скольжения, после чего их корректировали в соответствии с методом, основанным на справедливости гипотезы об отсутствии вертикального ветра.
следует отметить, что на одном из объектов указанные углы перед их использованием для решения специальных задач предварительно «взвешивались» некоторыми коэффициентами, равными 0,8-0,85 для угла атаки и 0,6-0,65 для угла скольжения, после чего их корректировали в соответствии с методом, основанным на справедливости гипотезы об отсутствии вертикального ветра.
Указанный подход формирования углов атаки и скольжения обеспечивал достаточно эффективное применение всей номенклатуры неуправляемых авиационных средств поражения (АСП), но с некоторым ограничением их применения.
Учитывая приведенный опыт формирования рассматриваемых углов, представляется целесообразным характер изменения ошибок Δα и Δβ измерения углов атаки и скольжения, по аналогии с (46), представить в виде:

где 
 - измеренные значения углов атаки и скольжения; Δkα, Δkβ, Δα0, Δβ0 - некоторые параметры, описываемые, как постоянные случайные величины:
- измеренные значения углов атаки и скольжения; Δkα, Δkβ, Δα0, Δβ0 - некоторые параметры, описываемые, как постоянные случайные величины:

В соответствии с фиг. 1, 3, 5 и соотношением (21), выражение, определяющее курс горизонтальной составляющей скорости ветра относительно направления на Север, будет иметь следующий вид:

где ψп - путевой угол объекта: ψп=ψ+αCH
Для стационарной модели скорости ветра его направление относительно сторон Света на заданном интервале наблюдения следует считать постоянным. Это, очевидно, означает, что 
Записав выражение (48) в виде:

и продифференцировав его, получим следующее полезное соотношение:

Указанное соотношение позволяет достаточно просто получить дифференциальные уравнения, описывающие характер изменения таких параметров скорости ветра, как сΔψB и sΔψB. Приведем их:

Дифференциальное уравнение, описывающее характер изменения угла αB, определяющего направление вертикального ветра представим в виде уравнения, характерного для цветного шума 1-го порядка с ненулевым математическим ожиданием. Оно имеет следующий вид:

где 
 - параметры цветного шума 1-го порядка, характеризующие его изменчивость и интенсивность соответственно;
- параметры цветного шума 1-го порядка, характеризующие его изменчивость и интенсивность соответственно;  - белый шум 1-ой интенсивности.
- белый шум 1-ой интенсивности.
Дифференциальное уравнение, описывающее характер изменения погрешности Δu расчета скорости ветра может быть также представлено в виде цветного шума 1-го порядка с ненулевым математическим ожиданием:

где μu, σu, wu - соответствующие параметры цветного шума, функционально аналогичны параметрам уравнения (52).
Дифференциальные уравнения, описывающие характер изменения координат Δn, Δh, Δе относительного местоположения ПВД из состава СВС и ИНС в проекциях на оси ГСТ ONHE, представлены выше и имеют вид (34.4).
Таким образом, имеем следующий вектор х воздушно-скоростных параметров состояния, подлежащих оптимальному оцениванию в штатных режимах маневренного полета:

В завершение описания синтезируемой системы оптимальной фильтрации приведем вид ее матрицы наблюдения Н и выражения для расчета ее элементов hij (i=1÷3, j=1÷13).
Матрица наблюдения Н, в соответствии с (45.1)-(45.3) и видом вектора х параметров состояния системы (54) имеет размерность [3×13] и может быть представлена в следующем виде:

При определении линеаризованных выражений для расчета элементов hij матрицы измерения (55) использовалось следующее выражение:

представленное в Э. Сейдж, Дж. Меле «Теория оценивания и ее применение в связи и управлении», «Связь», Москва, 1976 г [3] (стр. 446-448).
При их нахождении использовались уравнения связи (43) и входящие в них математические блоки (44.1), (44.2), (44.3) с членами, зависящими от параметров состояния системы, представленными вектором (54), и соотношениями, определяющими ΔV (46) и Δα, Δβ (47).
Выражения для расчета представленных в (55) элементов hij матрицы наблюдения Н имеют следующий вид:





После описания характера изменения параметров состояния исходной системы (46), (46.1), (47), (47.1), (48)-(51), (52), (53), (54), (34.4), получения выражений для сигналов измерения (45.1), (45.2), (45.3), которые являются входными сигналами оптимального фильтра-идентификатора ошибок измерения/расчета и, одновременно, определения неизвестных воздушно-скоростных параметров и проведения достаточно трудоемких математических преобразований в обеспечение формирования матрицы измерения Н (55), элементы которой (57.1), (57.2), (57.3), из соображений повышения точности оптимального оценивания, рассчитывают с учетом нелинейных членов второго порядка малости (57), приведем в векторно-матричном виде оптимальную процедуру дискретного фильтра Калмана.
При этом, учитывая, что модель сообщения рассматриваемой системы является линейной, а элементы матрицы измерения представлены в аналитически проработанном, линеаризованном виде, приведем ее в традиционном для линейных систем дискретном виде (стр. 269 [3]):
1. Исходная модель сообщения:

2. Модель наблюдения:

3. Априорные данные, используемые при синтезе:

4. Структура оптимального фильтра:

где 
5. Вычисление матрицы априорных ошибок оценивания:

6. Вычисление оптимальных коэффициентов усиления:

7. Вычисление матрицы апостериорных ошибок оценивания:

Последнюю операцию, представленную выражением (64), следует рассматривать, как подготовительную к следующему такту вычислений.
В приведенных выше соотношениях (58÷64) приняты следующие условные обозначения:
xk - вектор параметров состояния системы;
 - вектор оптимальных апостериорных оценок параметров состояния;
- вектор оптимальных апостериорных оценок параметров состояния;
wk - вектор случайных возмущений модели сообщения;
Vk - вектор случайных шумов измерения;
Фk+1,k - фундаментальная матрица системы (модели сообщения);
Гk+1,k - матрица передачи случайных возмущений системы;
Hk - матрица измерения;
 - вектор априорных оценок параметров состояния системы;
- вектор априорных оценок параметров состояния системы;
Pk+1,k - априорная корреляционная матрица ошибок оценивания;
Pk+1 - апостериорная корреляционная матрица ошибок оценивания;
Qk - корреляционная матрица случайных шумов системы;
Rk - корреляционная матрица случайных шумов измерения;
zk - вектор сигналов измерения;
Kk+1 - матрица оптимальных коэффициентов усиления.
Сведем приведенные выше дифференциальные уравнения, описывающие характер изменения ошибок измерения/расчета и определения неизвестных воздушно-скоростных параметров (46), (46.1), (47), (47.1), (51)-(53), (34.4) в единую систему дифференциальных уравнений, представляя ее в дискретном виде:

где τ - дискретность решения рассматриваемой задачи (τ=0,1 сек); w1 - w6, ws, wc,  , wu, wn, wh, we - некоррелированные шумы возмущения известной интенсивности.
, wu, wn, wh, we - некоррелированные шумы возмущения известной интенсивности.
Необходимо помнить, что первые шесть параметров состояния приведенной системы уравнений связаны соотношениями (46), (47), что важно, как при формировании матрицы наблюдения Н, так и при синтезе структуры оптимального фильтра-идентификатора в целом.
На основании приведенной системы дискретных уравнений (65) достаточно просто может быть сформирована фундаментальная матрица Фk+1,k рассматриваемой системы и доопределены элементы матрицы измерения.
Относительно линеаризованной матрицы измерения Н (55) следует отметить, что отдельные ее элементы, представленные в функции априорных оценок параметров состояния системы, таких, как  как следует из выражения (56), должны быть представлены в функции их прогнозируемых значений, каждое из которых рассчитывается в соответствии с конкретным дискретным уравнением системы (65).
как следует из выражения (56), должны быть представлены в функции их прогнозируемых значений, каждое из которых рассчитывается в соответствии с конкретным дискретным уравнением системы (65).
В соответствии с (58)÷(64), полученными выше выражениями для сигналов z1, z2, z3 (45.1), (45.2), (45.3) и матрицы измерения Н (55), (57.1)÷(57.3), а также моделью сообщения (65), описывающей характер изменения во времени ошибок измерения/расчета основной тройки ΔV, Δα, Δβ воздушно-скоростных параметров и, одновременно, определения неизвестных параметров угловой ориентации скорости ветра  ,
,  , αB и координат Δn, Δh, Δе относительного размещения ПВД и ИНС, приведем математическое описание всех, используемых в процедуре (58)÷(64) матриц.
, αB и координат Δn, Δh, Δе относительного размещения ПВД и ИНС, приведем математическое описание всех, используемых в процедуре (58)÷(64) матриц.
Выражение для фундаментальной матрицы Фk+1,k размерностью [13×13] не приводится, поскольку все ее элементы Фik k+1,k (i,j = 1÷13) достаточно просто могут быть получены из системы дискретных уравнений (65).
Матрица передачи возмущений системы Гk+1,k имеет размерность [13×13] и равна единичной матрице 13-го порядка, умноженной на τ.

где [1] - единичная матрица размерности [13×13].
Матрица измерения Н представлена выше (55) и имеет размерность [3×13], ее элементы определяются выражениями (57.1)-(57.3). При этом вектор z сигналов измерения размерностью [3×1] представлен компонентами z1, z2, z3 (45.1)-(45.3), наблюдаемыми на фоне аддитивных некоррелированных шумов измерения V1, V2, V3 с известными интенсивностями.
Матрица шумов измерения Rk имеет размерность [3×3] и равна:

где  - дисперсии соответствующих шумов измерения.
- дисперсии соответствующих шумов измерения.
В соответствии с дискретной системой уравнений (65) матрица Qk шумов возмущения системы имеет 13-ый порядок, является диагональной с элементами вида:

где  - дисперсии шумов системы (65).
- дисперсии шумов системы (65).
Априорная (62) и апостериорная (64) корреляционные матрицы ошибок оценивания являются положительно-определенными симметрическими матрицами размерности [13×13].
Матрица оптимальных коэффициентов усиления оптимального фильтра-идентификатора ошибок воздушно-скоростных параметров имеет размерность [13×3] и может быть представлена в следующем виде:

При алгоритмической реализации рассматриваемого способа формирования воздушно-скоростных параметров будем использовать дискретную линеаризованную процедуру оптимальной фильтрации и идентификации (58)-(64).
Однако, с целью более наглядного и осмысленного восприятия рассматриваемой процедуры представляется целесообразным дополнительно провести синтез структуры оптимального фильтра-идентификатора для случая его непрерывного представления.
В этом случае будут определены роль и место каждого сигнала измерения, модели сообщения (65), каждого оптимального коэффициента усиления из всей совокупности входящих в матрицу (69) коэффициентов и каждого элемента hij (i=1÷3, j=1÷13) матрицы наблюдения (55). Достаточно наглядно будет раскрыто понятие каждой из 3-х невязок измерения ν1, ν2, ν3 и тем самым - суть всех присутствующих в них ошибок.
Для синтеза упомянутой структуры оптимального фильтра-идентификатора ошибок воздушно-скоростных параметров воспользуемся матричным дифференциальным уравнением оптимального фильтра-идентификатора для случая его непрерывного представления/описания:

где: F - матрица состояния системы; K - матрица оптимальных коэффициентов усиления;  - вектор оптимальных оценок параметров состояния системы; z - вектор сигналов измерения.
- вектор оптимальных оценок параметров состояния системы; z - вектор сигналов измерения.
Структура векторов z,  и матриц κ и Н соответствует представленному выше их описанию.
и матриц κ и Н соответствует представленному выше их описанию.
При этом матрица состояния системы F будет определяться системой приведенных выше дифференциальных уравнений (46.1), (47.1), (51), (52), (53), (34.4) с обязательным учетом соотношений (46) и (47), определяющих ошибки ΔV, Δα, Δβ измерения воздушной скорости  и углов атаки
и углов атаки  и скольжения
и скольжения 
Синтез структуры оптимального фильтра-идентификатора ошибок воздушно-скоростных параметров будем проводить методом структуризации системы дифференциальных уравнений 13-го порядка, сформированной в соответствии с матричным дифференциальным уравнением (70) и видом входящих в него матриц F, K, Н и векторов z, 
Приведем указанную систему дифференциальных уравнений, которая, в соответствии с видом матриц F, K, Н и векторов z,  , будет иметь следующий вид:
, будет иметь следующий вид:

В приведенной системе дифференциальных уравнений под ν1, ν2, ν3 следует понимать соответствующие невязки измерения, формируемые в соответствии с выражениями вида:


Следует отметить, что выражения (72) - это развернутая построчная запись векторно-матричного представления невязок измерения 
Приведенная выше система дифференциальных уравнений (71) в совокупности с выражениями (72) для невязок измерения ν1, ν2, ν3, а также определяющие их сигналы измерения z1, z2, z3 (45.1), (45.2), (45.3) и линеаризованные элементы (i=1÷3, j=1÷13) (57.1), (57.2), (57.3) матрицы наблюдения Н (55) однозначно определяют структуру оптимального фильтра-идентификатора ошибок измерения/расчета воздушно-скоростных параметров.
Для ее разработки воспользуемся методом структуризации системы дифференциальных уравнений (71).
Схема, определяющая структуру рассматриваемого фильтра-идентификатора, приведена на фиг. 9, сразу же после описанных выше фиг. 1-8. Но при этом, ее описание, также, как и двух блок-схем алгоритмов, представленных на фиг. 10 и фиг. 11, определяющих общую процедуру формирования, коррекции и восстановления всего перечня воздушно-скоростных параметров, включая и циклограмму ее организации, целесообразно проводить по окончании их разработки, что будет способствовать их более осмысленному восприятию.
Поэтому все представленное на фиг. 9, 10 и 11 следует рассматривать, как один из возможных примеров реализации предлагаемого способа формирования воздушно-скоростных параметров (ВСП).
На структурной схеме (фиг. 9) приняты традиционные для теории управления обозначения для усилительных, интегрирующих и суммирующих блоков.
Обозначения для оптимальных коэффициентов усиления kij (i=1÷13, j=1÷3) и передаточных блоков, реализующих функцию «взвешивания» проходящих через них сигналов, абсолютно аналогичны.
Единственной особенностью, которая делает рассматриваемую структурную схему отличной от приведенного ее математического описания, является то обстоятельство, что в ней вместо элементов матрицы h11, h13 и h15 используются элементы h12, h14 и h16, поскольку используемая в h11, h13 и h15 операция взвешивания текущими измеренными значениями сигналов  проведена в соответствующей модели формирования оценок
проведена в соответствующей модели формирования оценок  (см. фиг. 7).
(см. фиг. 7).
Следует также отметить одно достаточно важное для программной реализации рассматриваемой процедуры оптимального оценивания обстоятельство, заключающееся в том, что существенно упростить ее можно путем использования известного приема декомпозиции фильтра.
Суть его состоит в том, что вместо программной реализации фильтра 13-го порядка при трех сигналах измерения предлагается разработать три независимых фильтра-идентификатора, каждый из которых работает по собственному сигналу измерения. При этом первый из них будет иметь 13-й порядок, а размерность двух других - на два порядка меньше (за счет отсутствия описания параметров ΔKV, ΔV0, определяющих ошибку ΔV измерения модуля  воздушной скорости (46), (46.1)).
воздушной скорости (46), (46.1)).
Указанный прием позволит существенно сократить объем производимых вычислений и, как следствие, повысить быстродействие процедуры оптимального оценивания практически без ущерба для ее точности.
Венцом процедуры оптимального оценивания является коррекция измеряемых воздушно-скоростных параметров и формирование их полного перечня в штатном режиме полета. Под штатным далее будем понимать такой полет, при котором измеряемые СВС и ДУАС параметры являются формально достоверными. Приведем ее.
Полученные в результате оптимального оценивания текущие значения оценок  ошибок измерения воздушной скорости
ошибок измерения воздушной скорости  и углов атаки
и углов атаки  и скольжения
и скольжения  используют для их коррекции и формирования истинных значений указанных параметров:
используют для их коррекции и формирования истинных значений указанных параметров:

Используя полученные значения  (73), рассчитывают истинные составляющие воздушной скорости в проекциях на оси ССК Oxyz объекта. Указанные составляющие, в соответствии с векторно-матричным выражением (13) и видом матрицы С (15), имеют вид:
(73), рассчитывают истинные составляющие воздушной скорости в проекциях на оси ССК Oxyz объекта. Указанные составляющие, в соответствии с векторно-матричным выражением (13) и видом матрицы С (15), имеют вид:

Дополнительно, зная текущее значение оценки  ошибки расчета модуля скорости ветра
ошибки расчета модуля скорости ветра  рассчитывают его откорректированное значение
рассчитывают его откорректированное значение  :
:

При известных углах 
 текущей пространственной ориентации скорости ветра
текущей пространственной ориентации скорости ветра  один из которых рассчитывают по известным оценкам
один из которых рассчитывают по известным оценкам 

и сформированному по инерциальным измерениям текущему значению угла сноса αCH, в соответствии с (21), вычисляют курсовой угол ветра  :
:

После чего, используя текущие значения углов  определяющих пространственную ориентацию скорости ветра относительно ГСК OxГyГzГ и ГСТ ONHE (фиг. 5, фиг. 1), рассчитывают составляющие скорости ветра в проекциях на оси ГСК OxГyГzГ и ГСТ ONHE:
определяющих пространственную ориентацию скорости ветра относительно ГСК OxГyГzГ и ГСТ ONHE (фиг. 5, фиг. 1), рассчитывают составляющие скорости ветра в проекциях на оси ГСК OxГyГzГ и ГСТ ONHE:

В соответствии с векторно-матричным выражением (5) и видом матрицы S (7), рассчитывают составляющие скорости ветра в проекциях на оси ССК Oxyz:


Приведенные составляющие (79), в совокупности с откорректированными компонентами воздушной скорости (74), в штатном режиме полета могут быть использованы для расчета поправок на стрельбу при применении всей номенклатуры неуправляемых авиационных средств поражения (АСП), а также при решении специальных задач.
Для сверхманевренного истребителя с управляемым вектором тяги штатными режимами полета сегодня являются все режимы, в которых предполагается выполнение высокодинамичных фигур высшего пилотажа, типа «бочки», «петли Нестерова», боевого разворота, … которые не приводят к снятию достоверности основных воздушно-скоростных параметров, таких, как, измеряемые СВС модуль воздушной (приборной и истинной) скорости и ДУАС - углы атаки и скольжения, точное знание которых важно не только для решения боевых и специальных задач, но прежде всего, для пилотирования, что входит в круг вопросов несколько другого порядка, связанных с обеспечением безопасности полета, и требует более внимательного отношения как к контролю, так и формированию указанных параметров.
И в этом смысле, самыми информационно незащищенными режимами являются режимы малых скоростей, которые характерны не только для вертолетов - режим висения, но и для современных высокоманевренных истребителей, типа СУ-30СМ, МиГ-29СМТ, МиГ-35, когда они, выполняя фигуры высшего пилотажа, кратковременно останавливаются, зависая в воздухе. Это имеет место при выполнении таких фигур, как «кобра Пугачева», «колокол Квочура» и т.п.
И эта незащищенность обусловлена, исключительно, тем, что в режимах малых скоростей, при:
- воздушной скорости  снимается ее достоверность;
снимается ее достоверность;
- воздушной скорости  выдаются ошибочно измеренные углы атаки
выдаются ошибочно измеренные углы атаки  и скольжения
и скольжения  со снятыми признаками их достоверности;
со снятыми признаками их достоверности;
-  снимается достоверность углов атаки и скольжения, а измеряемые значения углов обнуляются.
снимается достоверность углов атаки и скольжения, а измеряемые значения углов обнуляются.
На основании приведенных данных представляется целесообразным при  полет из разряда штатного переводить в разряд малых скоростей и, как следствие, описанную выше процедуру оптимального оценивания ошибок измерения/расчета воздушно-скоростных параметров приостанавливать, весь срез полученных оценок, и прежде всего, определяющих параметры пространственной модели скорости ветра, запоминать, и после расчета составляющих скорости ветра в проекциях на оси ГСТ ONHE (78), переходить к решению обратной задачи пространственного треугольника скоростей.
полет из разряда штатного переводить в разряд малых скоростей и, как следствие, описанную выше процедуру оптимального оценивания ошибок измерения/расчета воздушно-скоростных параметров приостанавливать, весь срез полученных оценок, и прежде всего, определяющих параметры пространственной модели скорости ветра, запоминать, и после расчета составляющих скорости ветра в проекциях на оси ГСТ ONHE (78), переходить к решению обратной задачи пространственного треугольника скоростей.
Суть ее заключается в восстановлении всего перечня воздушно-скоростных параметров на основе использования составляющих (78) и текущих компонент путевой скорости, измеренных ИНС в режиме ее инерциально-доплеровской коррекции.
Первой операцией решения указанной задачи является расчет составляющих воздушной скорости в проекциях на оси ГСТ ONHE. Она выполняется в полном соответствии с определением воздушной скорости, как скорости перемещения объекта относительно ветра:

где  - запомненные компоненты скорости ветра (78);
- запомненные компоненты скорости ветра (78);  - составляющие текущей путевой скорости объекта.
- составляющие текущей путевой скорости объекта.
Следующая операция - это расчет составляющих воздушной скорости в проекциях на оси ССК Oxyz. Она осуществляется в соответствии с векторно-матричным выражением вида:

которое достаточно просто может быть получено посредством подстановки (1) в (5).
Представляя (81) в скалярном виде, получим следующие выражения для расчета составляющих 

Составляющие воздушной скорости (82), в совокупности с составляющими скорости ветра (79), могут быть использованы для расчета текущих поправок на стрельбу.
И последняя операция - это расчет восстановленных углов атаки  и скольжения
и скольжения  по известным составляющим (82).
по известным составляющим (82).
Выражения для расчета указанных углов могут быть получены на основе использования соотношений вида:

для проекций вектора воздушной скорости  на оси ССК Oxyz (фиг. 4). В соответствии с (83), искомые выражения для расчета углов атаки
на оси ССК Oxyz (фиг. 4). В соответствии с (83), искомые выражения для расчета углов атаки  и скольжения
и скольжения  будут иметь следующий вид:
будут иметь следующий вид:

Выше представлены две близкие по физической сути математические процедуры формирования воздушно-скоростных параметров.
Первая из них представлена выражениями (73)-(79) и используются в штатном режиме полета для коррекции и формирования полного перечня воздушно-скоростных параметров по результатам оптимального оценивания как текущих углов пространственной ориентации скорости ветра сΔψB, sΔψB, αB, так и ошибок измерения или расчета основных из них, таких, как ΔV, Δα, Δβ, Δu.
Вторая процедура представлена выражениями (80)-(84) и предназначена для формирования полного перечня воздушно-скоростной информации и, прежде всего, для восстановления той ее части, которая утрачивает свою достоверность в критических для СВС и ДУАС режимах полета, характеризующихся малым скоростным напором. Указанная процедура используется в режиме малых скоростей и для своей реализации предполагает стационарный характер изменения скорости ветра.
При этом, учитывая, что рассматриваемый режим полета является кратковременным и для самолета не превышает единиц секунд, а для вертолета - единиц минут, упомянутое выше условие не следует рассматривать как нечто, ограничивающее область применения рассматриваемого способа.
Важно также отметить, что оба представленных выше алгоритма формирования воздушно-скоростных параметров основаны на реализации ключевой для них процедуры оптимальной фильтрации и идентификации всех, необходимых для этого, параметров состояния, включающей:
- формирование физически и математически корректных уравнений связи;
- формирование входных сигналов оптимального фильтра-идентификатора;
- получение линеаризованных выражений для расчета элементов матрицы измерения системы;
- математическое описание характера изменения всех параметров состояния рассматриваемой системы и формирование инженерно обоснованной модели изменения ее параметров состояния;
- описание и синтез структуры оптимального фильтра-идентификатора ошибок измерения/расчета воздушно-скоростных параметров и оценивания текущих углов пространственной ориентации скорости ветра.
Место, взаимодействие и циклограмма включения в работу каждой из представленных выше процедур, а именно:
- оптимальной фильтрации и идентификации воздушно-скоростных параметров (ОФИВСП);
- коррекции их текущих, ошибочно измеренных значений (КВСП);
- формирования всей номенклатуры воздушно-скоростной информации в режиме малых скоростей (ФВСИ), достаточно наглядно приведено на блок-схеме алгоритма (фиг. 10) информационного взаимодействия подпрограмм ОФИВСП (блок 2), КВСП (блок 10), ФВСИ (блок 17).
На фиг. 10 принято традиционное для рассматриваемых схем начертание логических блоков (блоки 1, 6, 7, 11, 12, 15, 16, 22), подпрограмм (блоки 2, 10, 17), счетчиков времени (блоки 4, 18) и блоков присваивания/переприсваивания (блоки 3, 5, 8, 9, 13, 14, 19, 20, 21, 23, 24).
Приведенная блок-схема характерна для всех режимов полета, начиная со взлета, штатного для боевого объекта режима маневренного полета и режима малых скоростей.
Подпрограмма ОФИВСП (блок 2), структурная схема которой в ее непрерывном исполнении приведена на фиг. 9, предшествует как штатному режиму коррекции, реализуемому подпрограммой КВСП (блок 10), так и режиму малых скоростей, реализуемому подпрограммой ФВСИ (блок 17).
При этом процедуру коррекции ВСП в штатном режиме маневренного полета реализуют при скоростях полета V>100 км/ч (блок 1) и начинают спустя 180 секунд (блок 6) после начала работы оптимального фильтра-идентификатора ошибок ВСП.
Указанный временной сдвиг выбран из соображений использования для коррекции гарантированно точных значений оценок ошибок измерения ВСП.
Далее процедура оптимального оценивания (п/п ОФИВСП) и коррекции ВСП (п/п КВСП) осуществляются параллельно. Причем, до тех пор, пока объект ни перейдет в режим малых скоростей, при котором осредненное значение воздушной скорости принимается равным  (блок 16). Для гарантированного выполнения полета в режиме малых скоростей необходимо, чтобы пр. ОФИ (блок 9, где он устанавливается, и блок 15, где он контролируется) был равен 1.
(блок 16). Для гарантированного выполнения полета в режиме малых скоростей необходимо, чтобы пр. ОФИ (блок 9, где он устанавливается, и блок 15, где он контролируется) был равен 1.
Следует отметить, что в режиме малых скоростей процедура оптимальной фильтрации и идентификации приостанавливается. И для формирования полного перечня воздушно-скоростной информации используются сформированные на момент приостановки работы п/п ОФИВСП значения скорости ветра и текущие значения путевой скорости, измеренные в режиме инерциально-доплеровской коррекции.
После окончания режима малых скоростей и устойчивого перехода в штатный режим полета описанная выше процедура работы повторяется. Используемые в представленной выше блок-схеме (фиг. 10) осредненные на 3-х секундном интервале времени tocp (блок 11) значения  воздушной скорости формируют в соответствии с алгоритмом, приведенным на блок-схеме фиг. 11.
воздушной скорости формируют в соответствии с алгоритмом, приведенным на блок-схеме фиг. 11.
Сама процедура нахождения среднего осуществляется в соответствии с рекуррентным выражением блока 6 (фиг. 11).
При этом используются измеренные СВС текущие значения модуля воздушной скорости V (см. выражение блока 6).
Полученное осредненное значение воздушной скорости  хранится в памяти (блок 13) и используется на следующем интервале осреднения до получения его обновленного значения.
хранится в памяти (блок 13) и используется на следующем интервале осреднения до получения его обновленного значения.
Приведенная процедура осреднения является циклической и осуществляется на всем интервале полета.
Время осреднения tocp (блок 11) может быть уточнено по результатам проведения натурных работ и предположительно доведено с принятых 3-х секунд до 2-х секунд.
Используемый в рассматриваемой блок-схеме пр. П1 является признаком 1-го прохода.
Заявляемый способ формирования воздушно-скоростных параметров маневренного объекта реализуется следующим образом:
1. На основе обработки текущей воздушно-скоростной, навигационной и пилотажной информации реализуют совместную обработку измеряемых СВС модуля воздушной скорости  и углов атаки
и углов атаки  и скольжения
и скольжения  его текущей ориентации относительно связанной с объектом системы координат с ДУАС, расчетного значения модуля
его текущей ориентации относительно связанной с объектом системы координат с ДУАС, расчетного значения модуля  скорости ветра и неизвестных, подлежащих оцениванию углов его пространственной ориентации относительно горизонтированной системы координат объекта, а также измеряемых в режиме инерциально-доплеровской коррекции текущих углов истинного курса ψ, крена γ и тангажа υ объекта, составляющих
скорости ветра и неизвестных, подлежащих оцениванию углов его пространственной ориентации относительно горизонтированной системы координат объекта, а также измеряемых в режиме инерциально-доплеровской коррекции текущих углов истинного курса ψ, крена γ и тангажа υ объекта, составляющих 
 и модуля
и модуля  его путевой скорости, а также текущих значений углов сноса αCH и наклона траектории αHT его ориентации относительно ГСК объекта, по результатам проведения которой формируют полный перечень воздушно-скоростных параметров.
его путевой скорости, а также текущих значений углов сноса αCH и наклона траектории αHT его ориентации относительно ГСК объекта, по результатам проведения которой формируют полный перечень воздушно-скоростных параметров.
Дополнительно, для достижения заявленного технического результата осуществляют:
2. В соответствии с определением воздушной скорости объекта, как скорости его перемещения относительно скорости ветра, формируют составляющие Vx, Vy, Vz воздушной скорости в проекциях на оси ССК Oxyz (35), (36), (37). Для этого используют соответствующие составляющие  его путевой скорости в месте установки ПВД (34.6) и компоненты ux, uy, uz скорости ветра (33).
его путевой скорости в месте установки ПВД (34.6) и компоненты ux, uy, uz скорости ветра (33).
Использование составляющих путевой скорости (34.6) продиктовано необходимостью обеспечения адекватности формируемых составляющих воздушной скорости (35) их действительным значениям, полученным по измерениям СВС и ДУАС.
3. С целью реализации замкнутой процедуры формирования составляющих воздушной скорости (35) на основе выражений (34.6) для компонент путевой скорости объекта в месте установки ПВД и определяющих их инерциальных составляющих (34) и соответствующих компонент  кинематической скорости относительного перемещения ПВД (34.6), (34.7)÷(34.11), в перечень оцениваемых параметров состояния системы, наряду с воздушно-скоростными параметрами, включают координаты Δn, Δh, Δе местоположения ПВД относительно ИНС в проекциях на оси ГСТ ONHE.
кинематической скорости относительного перемещения ПВД (34.6), (34.7)÷(34.11), в перечень оцениваемых параметров состояния системы, наряду с воздушно-скоростными параметрами, включают координаты Δn, Δh, Δе местоположения ПВД относительно ИНС в проекциях на оси ГСТ ONHE.
Характер изменения указанных координат определяется составляющими 

 угловой скорости вращения объекта относительно ГСТ ONHE и описывается системой линейных дифференциальных уравнений вида (34.4), а сами составляющие
угловой скорости вращения объекта относительно ГСТ ONHE и описывается системой линейных дифференциальных уравнений вида (34.4), а сами составляющие  кинематической скорости движения ПВД относительно ИНС определяются выражениями (34.5) (см. фиг. 7).
кинематической скорости движения ПВД относительно ИНС определяются выражениями (34.5) (см. фиг. 7).
Расширение традиционной для воздушно-скоростных параметров модели ошибок и включение в нее дифференциальных уравнений (34.4), описывающих характер изменения координат относительного местоположения ПВД и ИНС, позволяет:
- обеспечить математически корректное и физически обоснованное описание рассматриваемой системы;
- реализовать унифицированную, замкнутую процедуру решения рассматриваемой задачи для всего многообразия объектов боевого назначения;
- и, как следствие, достичь максимальной точности и быстродействия оптимального оценивания всего перечня воздушно-скоростных параметров (54) за счет устранения основной причины их возможной расходимости в маневренном полете.
4. С целью получения расчетных выражений для входных сигналов оптимального фильтра-идентификатора воздушно-скоростных параметров состояния системы (54) и выражений для расчета текущих элементов его матрицы наблюдения, формируют алгебраическую систему уравнений, связывающих между собой идеальные значения воздушно-скоростных, навигационных, пилотажных и других физически целесообразных параметров, типа, координат относительного местоположения ПВД и ИНС.
В предлагаемом решении указанные уравнения формируют путем приведения составляющих Vx, Vy, Vz воздушной скорости V объекта к осям скоростной системы координат OxCyCzC (фиг. 4). Указанные уравнения представлены системой алгебраических уравнений (28).
После подстановки в уравнения (28) выражений для составляющих Vx, Vy, Vz (38) с учетом соотношений вида (39), связывающих измеренные/расчетные значения воздушно-скоростных параметров  и их идеальные значения V, α, β, u, получают искомую систему уравнений связи (43) с определяющими их математическими блоками для V1x, V1y, V1z (44.1), V2x, V2y, V2z (44.2), V3x, V3y, V3z (44.3).
и их идеальные значения V, α, β, u, получают искомую систему уравнений связи (43) с определяющими их математическими блоками для V1x, V1y, V1z (44.1), V2x, V2y, V2z (44.2), V3x, V3y, V3z (44.3).
5. В соответствии с традиционной схемой преобразования полученных уравнений (43), (44.1)-(44.3), их представляют таким образом, чтобы в их правых частях были сгруппированы члены, не зависящие от подлежащих оцениванию параметров, вида ΔV, Δα, Δβ, Δu, sΔψB, сΔψB, αB, Δn, Δh, Δе, а в левых - все оставшиеся члены, представленные в функции перечисленных выше параметров.
6. Правые части указанных уравнений (43), которые определяются по измерениям СВС, ДУАС и ИНС принимают за сигналы измерения z1, z2, z3 (45.1), (45.2), (45.3), а по левым частям, в соответствии с (56), формируют линеаризованные выражения для расчета элементов матрицы измерения Н (55).
Расчет их текущих значений осуществляют в соответствии с выражениями (57.1), (57.2), (57.3).
7. На основании экспериментальных данных, базирующихся на многолетнем опыте эксплуатации и испытаний объектов боевого назначения, предложены практически целесообразные и инженерно обоснованные модели, описывающие характер изменения ошибок измерения/расчета основных воздушно-скоростных параметров.
В частности, в соответствии с моделью, представленной выражением (46), и ее параметрами вида (46.1), изменяются аэродинамические ошибки измерения воздушной скорости отечественных СВС.
Аналогично, в основу модели, описывающей характер изменения ошибок измерения углов атаки и скольжения (47), (47.1), положены опытные данные, полученные в процессе летной эксплуатации и боевого применения ряда современных объектов боевого назначения.
При разработке дифференциальных уравнений, описывающих характер изменения во времени sΔψB и cΔψB, показано, что угловая скорость изменения угла ΔψB при стационарной относительно сторон Света модели ветра, будет определяться угловой скоростью изменения путевого угла, взятой с обратным знаком (50).
В соответствии с этим, уравнения, описывающие динамику изменения таких параметров скорости ветра, как sΔψB и cΔψB, для общего случая маневренного полета, будут иметь вид, представленный дифференциальными уравнениями (51).
Указанные дифференциальные уравнения позволяют обеспечить эффективное оценивание описываемых ими параметров, как в случае маневренного полета, сопровождающегося изменением путевого угла объекта, так и без него.
Дифференциальные уравнения, описывающие характер изменения угла αB вертикального ветра, а также ошибки Δu расчета скорости ветра, учитывая изменчивость указанных параметров, представляют в виде цветных шумов первого порядка с ненулевыми математическими ожиданиями и известными параметрами, характеризующими их интенсивность и изменчивость (52), (53).
8. Учитывая, что все представленные выше параметры, определяющие вектор состояния рассматриваемой системы (54), описываются линейными дифференциальными уравнениями, а нелинейная матрица измерения Н (55) после применения к ее элементам процедуры (56)приобретают характер линеаризованной матрицы с элементами hij (i=1-3, j=1-13) (57.1), (57.2), (57.3) в функции априорных оценок воздушно-скоростных параметров, вида 
 поэтому при синтезе процедуры оптимальной фильтрации и идентификации представляется целесообразным использовать линейный вариант ее дискретной реализации (58)-(64).
поэтому при синтезе процедуры оптимальной фильтрации и идентификации представляется целесообразным использовать линейный вариант ее дискретной реализации (58)-(64).
Применительно к предлагаемой процедуре оптимального оценивания вид используемых при ее реализации матриц и векторно-матричных уравнений представлен выражениями (66)-(72).
9. Предлагаемый способ формирования воздушно-скоростных параметров используют как в штатном режиме полета, так и в режиме малых скоростей, который, в отличие от штатного, является проблемным для СВС и ДУАС, поскольку измеряемая ими информация при скоростях полета, меньших 100 км/ч, утрачивает свою достоверность.
В штатном режиме полета, когда измеряемая СВС и ДУАС информация достоверна, для повышения ее точности реализуют рекуррентную процедуру оптимального оценивания ошибок измеряемых и рассчитываемых воздушно-скоростных сигналов и идентификации априори неизвестных параметров, определяющих значения углов текущей ориентации скорости ветра ΔψB, αB и координат Δn, Δh, Δе относительного местоположения ПВД и ИНС в проекциях на оси ГСТ ONHE.
Параллельно с ней, используя полученные в процессе оптимальной фильтрации и идентификации оценки воздушно-скоростных параметров, осуществляют коррекцию как измеренных СВС и ДУАС сигналов  так и аналитического значения модуля
так и аналитического значения модуля  скорости ветра и формируют таким образом полный перечень откорректированной воздушно-скоростной информации, необходимой как для решения боевых и специальных задач, так и для пилотирования объекта.
скорости ветра и формируют таким образом полный перечень откорректированной воздушно-скоростной информации, необходимой как для решения боевых и специальных задач, так и для пилотирования объекта.
Операции, в соответствии с которыми осуществляется упомянутая коррекция и формирование воздушно-скоростной информации, представлены выражениями (73)-(79).
10. В режиме малых скоростей, при утрате достоверности измеряемой СВС и ДУАС информации, процедуру оптимального оценивания приостанавливают, полученные до наступления нештатной для СВС и ДУАС ситуации значения оценок воздушно-скоростных параметров запоминают и используют в качестве начальных условий в следующем сеансе оценивания, при этом последнее откорректированное значение скорости ветра (75) и запомненные значения углов  его пространственной ориентации используют для формирования его составляющих в проекциях на оси ГСТ ONHE (78), на основе которых формируют полный срез воздушно-скоростных параметров (80)-(84), используя при этом текущие значения соответствующей навигационной и пилотажной информации, измеренной ИНС в режиме инерциально-доплеровской коррекции.
его пространственной ориентации используют для формирования его составляющих в проекциях на оси ГСТ ONHE (78), на основе которых формируют полный срез воздушно-скоростных параметров (80)-(84), используя при этом текущие значения соответствующей навигационной и пилотажной информации, измеренной ИНС в режиме инерциально-доплеровской коррекции.
Следующий сеанс оптимального оценивания реализуют в штатном для СВС и ДУАС режиме работы.
11. То обстоятельство, что при разработке предлагаемого способа формирования воздушно-скоростных параметров используются уравнения связи (28), является неслучайным, поскольку, как представляется, только в этом случае описание воздушно-скоростных параметров осуществляется с общесистемных позиций.
Действительно, кроме приема, который непосредственно используется при формировании уравнений (28), указанный подход предполагает обязательное предварительное формирование составляющих воздушной скорости в проекциях на оси ССК Oxyz (35), в соответствии с ее определением, как скорости перемещения объекта относительно ветра.
Громоздкость получаемых при этом рабочих выражений является закономерным следствием используемого при этом подхода формирования выбранных уравнений связи.
Представляется, что в случае использования скалярной записи векторного выражения вида:

в проекциях на оси ССК Oxyz, уравнения связи и, как следствие, вся последующая процедура синтеза, несколько упростятся.
Но и в этом случае должны быть использованы те основополагающие приемы синтеза, которые составляют физическую и математическую суть предлагаемого решения.
Основными из них являются следующие:
- математическая модель, описывающая характер изменения воздушно-скоростных параметров состояния системы, таких, как ошибки измерения углов атаки Δα и скольжения Δβ и модуля воздушной скорости ΔV, а также текущие значения параметров sΔψB, сΔψB, αB, определяющих пространственную ориентацию скорости ветра, включая и ошибку Δu ее расчета, должна иметь представленный при осуществлении изобретения вид;
- с целью корректного математического описания уравнений связи, вида (85), и, как следствие, повышения наблюдаемости, быстродействия и точности оптимального оценивания всего перечня воздушно-скоростных параметров состояния, представленную выше модель их изменения расширяют, включая в нее дифференциальные уравнения вида (34.4), описывающие характер изменения координат Δn, Δh, Δе относительного местоположения ПВД и ИНС в проекциях на оси ГСТ ONHE;
- учитывая то обстоятельство, что уравнения связи (28), (85) справедливы, исключительно, для идеальных значений xj входящих в них параметров, но, как правило, некоторые из них, либо вообще неизвестны (sΔψB, сΔψB, αB, Δn, Δh, Δе), либо известны их текущие ошибочно измеренные значения 
 для решения поставленной задачи представляется целесообразным использовать известный прием замены идеальных значений xj рассматриваемых параметров их физически равноценными значениями, равными
для решения поставленной задачи представляется целесообразным использовать известный прием замены идеальных значений xj рассматриваемых параметров их физически равноценными значениями, равными  (39), где Δxj - неизвестная, подлежащая оцениванию погрешность измерения или расчета сигнала
(39), где Δxj - неизвестная, подлежащая оцениванию погрешность измерения или расчета сигнала 
Полученные после указанной замены уравнений связи приводят к виду, удобному для определения сигналов измерения zj и элементов hij (i=1-3, у=1-13) матрицы наблюдения;
- с целью конкретизации рассматриваемой задачи и сведения ее до рамок оценивания и коррекции, исключительно, воздушно-скоростных параметров, представляется целесообразным ее решение проводить с учетом того, что используемая при этом инерциальная информация измеряется ИНС, функционирующей в режиме инерциально-доплеровского оценивания ее ошибок и с коррекцией, осуществляемой по разомкнутой схеме, при этом, при утрате достоверности измеряемой ДИСС информации, процедуру оценивания приостанавливают и, не прерывая коррекции, реализуют ее по результатам прогноза полученных оценок.
При этом, при синтезе комплексной инерциально-доплеровской системы необходимо использовать следующие новые инженерно-целесообразные и достаточно эффективные приемы и математические процедуры.
Один из основных приемов синтеза эффективной по точности и быстродействию оптимальной процедуры инерциально-доплеровского оценивания и коррекции продиктован необходимостью алгоритмического учета относительного размещения задействованных в этом режиме информационных систем ИНС и ДИСС.
Неучет координат размещения ИНС относительно ДИСС при выполнении объектом высокодинамичных маневров, типа «змейки», координированного или боевого разворотов приводит к появлению в сигналах измерения математически неописанных составляющих кинематической скорости, которые, будучи алгоритмически неучтенными, вместо методически обоснованного и ожидаемого оценивания всех параметров состояния, включая и слабонаблюдаемые, приводит к совершенно обратному результату, а именно, к расходимости процедуры оценивания.
Для реализации алгоритмического учета относительного размещения ИНС и ДИСС достаточно расширить традиционную для ИНС модель ошибок, включив в нее систему из трех дифференциальных уравнений первого порядка, описывающих характер изменения относительных координат Δξ, Δη, Δζ, размещения на объекте указанных информационных систем в проекциях на оси опорного трехгранника гироплатформы ИНС.
Из простых физических соображений можно показать, что указанные уравнения будут иметь следующий вид:

где  - составляющие угловой скорости вращения объекта относительно опорного трехгранника гироплатформы ИНС Oξηζ;
- составляющие угловой скорости вращения объекта относительно опорного трехгранника гироплатформы ИНС Oξηζ;  - кинематические составляющие скорости перемещения ИНС относительно ДИСС.
- кинематические составляющие скорости перемещения ИНС относительно ДИСС.
Включение приведенных выше дифференциальных уравнений (85.1) в проекциях на оси ОТГП ИНС Оξηζ в состав традиционной для инерциально-допплеровского режима коррекции модели ошибок ИНС позволяет получить ее расширенную модель, которая описывает не только традиционные для ИНС параметры и их связи, но и те кинематические составляющие сигналов измерения, которые ранее не учитывались.
Расширение модели ошибок ИНС позволяет устранить основную причину алгоритмической несостоятельности известных алгоритмов коррекции, заключающуюся в некорректном математическом описании исходной системы, и обеспечить тем самым гарантированную наблюдаемость и устойчивую сходимость всех и, в первую очередь, слабонаблюдаемых параметров состояния ИНС, таких, как угол αz азимутального ухода гироплатформы и дрейф εу продольного канала ИНС.
Более того, только в этом случае достаточно просто и эффективно может быть обеспечен алгоритмический учет и устранение всех нежелательных последствий, к которым приводят математически не описанные кинематические составляющие скорости, имеющие место при маневре объекта и обусловленные геометрией относительного размещения задействованных в рассматриваемом режиме информационных систем.
Важное практическое значение имеет и математически строгая, структурно замкнутая, унифицированная процедура алгоритмического учета текущих ошибок счисления/ измерения навигационной информации и ее эффективной коррекции по результатам оптимального оценивания или прогноза.
Использование указанной процедуры в режиме инерциально-доплеровского оценивания и коррекции осуществляется всякий раз, при формировании сигналов измерения оптимального фильтра-идентификатора.
При их формировании необходимо знать математическое описание как выходных сигналов ИНС, так и аналогичных сигналов, сформированных по измерениям ДИСС с использованием при этом дополнительных измерений ряда навигационных и пилотажных параметров с ИНС.
Следует отметить, что при разработке (выводе) модели ошибок ИНС важное значение имеет форма аналитического представления ее выходных сигналов по скорости, которая не только определяет вид матрицы наблюдения (измерения), но от нее существенным образом зависит и сама модель ошибок ИНС.
Не приводя и не анализируя возможные формы указанного представления, отметим, что наиболее распространенным, проработанным и приемлемым для решения рассматриваемой задачи является представление вида:

где Vξ, Vη, Vζ - составляющие абсолютной линейной скорости объекта в проекциях на оси ОТГП ИНС; αх, αу, αz - углы рассогласования реального и опорного трехгранников ГП; ΔVx, ΔVy - погрешности измерения/расчета горизонтальных составляющих абсолютной скорости, входящие, наряду с малыми углами αх, αу, αz рассогласования, в перечень параметров состояния ИНС.
Составляющие (85.2) по своей физической сути являются чисто инерциальными и в явном виде не включают в себя компоненты скорости кинематического характера (85.1).
Кинематические составляющие скорости будут представлены при сравнении составляющих скорости (85.2) и аналогичных составляющих, сформированных по текущим измерениям ДИСС.
Прежде, чем переходить к рассмотрению этих вопросов, целесообразно отметить, что при этом, впервые в практике разработки подобных алгоритмов, будут использованы известные кинематические соотношения, связывающие погрешности Δϕ, Δλ, Δχ автономного инерциального счисления основных навигационных параметров, а именно, географической широты ϕ, долготы λ и угла χ азимутальной ориентации опорного трехгранника гироплатформы ИНС, и погрешности Δυ, Δγ, Δψг измерения основной тройки пилотажных углов тангажа υ, крена γ и гироскопического курса ψг с малыми ошибками αх, αу выдерживания вертикали ИНС углом αz азимутального ухода ее гироплатформы ГП.
Указанные соотношения имеют следующий вид:

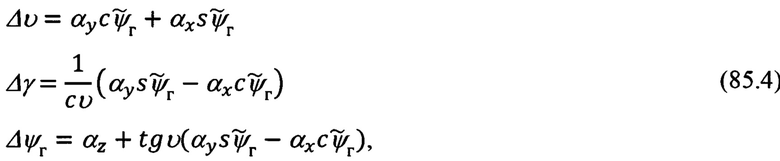
При формировании горизонтальных составляющих абсолютной линейной скорости объекта по измерениям ДИСС с использованием счисленных ИНС текущих значений географической широты и угла азимутальной ориентации опорного трехгранника ее гироплатформы должны быть выполнены следующие математические операции:
- приведение измеренных ДИСС составляющих 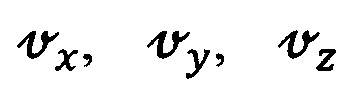 путевой скорости в проекциях на оси связанной с объектом системы координат к осям опорного трехгранника гироплатформы ИНС;
путевой скорости в проекциях на оси связанной с объектом системы координат к осям опорного трехгранника гироплатформы ИНС;
- расчет горизонтальных составляющих 
 абсолютной линейной скорости, обусловленной суточно-годовым вращением Земли.
абсолютной линейной скорости, обусловленной суточно-годовым вращением Земли.
Первая операция достаточно просто может быть реализована в соответствии с векторно-матричным выражением (21.2).
Итак, в соответствии с (21.2) и видом матрицы  (21.3), выражения для расчета составляющих
(21.3), выражения для расчета составляющих  будут иметь следующий вид:
будут иметь следующий вид:

Приведенные выражения для расчета составляющих путевой скорости объекта по измерениям ее компонент  в проекциях на оси ССК Oxyz предполагают использование точных углов ψг, υ, γ эволюции объекта.
в проекциях на оси ССК Oxyz предполагают использование точных углов ψг, υ, γ эволюции объекта.
Не располагая указанными углами, подставим в выражения (85.5) вместо ψг, υ, γ их значения, определяемые соотношениями:

в которых  - измеренные значения углов эволюции объекта; Δγ, Δυ, Δψг - погрешности их измерения.
- измеренные значения углов эволюции объекта; Δγ, Δυ, Δψг - погрешности их измерения.
Можно показать, что подстановка (85.6) в выражения для (85.5), приведет к их следующему представлению:

где приняты следующие обозначения для ошибочно рассчитанных составляющих 

 путевой скорости и ошибок
путевой скорости и ошибок  их расчета:
их расчета:



Подставляя в (85.9) вместо Δψг, Δυ, Δγ их значения в функции малых углов αх, αу, αz рассогласования реального и опорного трехгранников ГП ИНС (85.4), получим их следующее представление:

в котором приняты следующие обозначения:
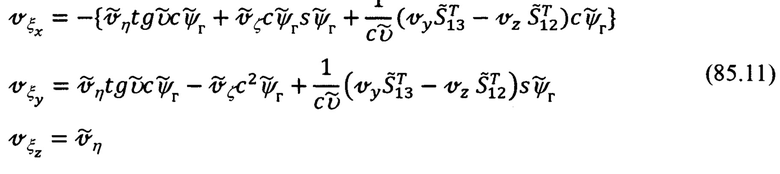

В приведенных выражениях (85.9), (85.11) под  следует понимать соответствующие элементы матрицы
следует понимать соответствующие элементы матрицы  (21.3), но в функции измеренных углов эволюции объекта
(21.3), но в функции измеренных углов эволюции объекта 
Все последующие операции будут исполнены на основе использования инерциальной информации и кинематических соотношений (85.3), связывающих ошибки счисления основных навигационных параметров Δϕ, Δλ, Δχ с малыми углами αх, αу, αz рассогласования реального и опорного трехгранников ГП ИНС.
Учитывая, что эти операции приводятся впервые, представим их без сокращений.
Запишем выражение для идеальной восточной составляющей  линейной скорости, обусловленной суточным вращением Земли:
линейной скорости, обусловленной суточным вращением Земли:

где ϕ - идеальное значение географической широты.
Учитывая, что идеальная широта, в общем случае, не известна, представим ее в виде:

где:  - счисленное значение широты, а Δϕ - погрешность ее счисления.
- счисленное значение широты, а Δϕ - погрешность ее счисления.
Подставляя (85.14) в (85.13), с учетом соотношения для Δϕ (85.3) получим следующее выражение для :

Входящий в (85.15) главный радиус RE земного эллипсоида вращения, определяемый выражением вида:

запишем в следующем, более целесообразном для дальнейшего рассмотрения виде:

В выражениях (85.16) и (85.17) под е2 следует понимать квадрат первого эксцентриситета эллипсоида вращения Земли, который для измерений, произведенных Ф.Н. Красовским, равен е2=0,0066934; h - бароинерциальная высота объекта.
Подставим в (85.17) соотношение (85.14). В результате, с точностью до величин первого порядка малости относительно Δϕ, получим:

где 

Подставляя (85.18) в выражение для (85.15) получим следующее выражение для восточной составляющей линейной скорости, обусловленной суточно-годовым вращением Земли:

С учетом обозначений, принятых для  и ΔRE (85.18), выражение (85.19) примет вид:
и ΔRE (85.18), выражение (85.19) примет вид:

Запишем последнее выражение в более приемлемом для дальнейшего рассмотрения виде:

Выражение для проекций на оси опорного трехгранника гироплатформы ИНС будут равны:

С учетом того, что идеальное значение угла азимутальной ориентации опорного трехгранника гироплатформы ИНС равно:

выражения для горизонтальных составляющих 
 (85.22) примут вид:
(85.22) примут вид:

Подставим в (85.24) выражение для  (85.21). В результате, с точностью до величин первого порядка малости относительно Δϕ и Δχ, получим следующие выражения для составляющих
(85.21). В результате, с точностью до величин первого порядка малости относительно Δϕ и Δχ, получим следующие выражения для составляющих  и
и 

Если к составляющим (85.25) прибавить соответствующие компоненты путевой скорости (85.7), то, с точностью, определяемой величинами первого порядка малости относительно малых величин вида Δϕ и Δχ, будут получены горизонтальные составляющие абсолютной линейной скорости объекта. Приведем их:

В дальнейшем, несмотря на то, что при формировании (85.26) использовалась не только информация, измеренная ДИСС, указанные составляющие абсолютной линейной скорости будем трактовать, как скорости, сформированные по измерениям ДИСС.
Входящие в (85.26) составляющие скорости  описываются представленными выше выражениями (85.8) и (85.10).
описываются представленными выше выражениями (85.8) и (85.10).
Полученные выше идеальные составляющие 
 (85.25) абсолютной линейной скорости, обусловленные вращением Земли, целесообразно представить в следующем виде:
(85.25) абсолютной линейной скорости, обусловленные вращением Земли, целесообразно представить в следующем виде:

В приведенных выражениях, в соответствии с (85.25), приняты следующие обозначения:

С учетом (85.27), выражения (85.26) примут вид:

Представляется целесообразным выражения (85.29) записать в следующем виде:

Сравнивая соответствующие выражения (85.2) и (85.30), вычитая из левых частей выражений (85.2) левые части выражений (85.30) и аналогично, для правых частей указанных выражений, учитывая при этом кинематиеские составляющие 
 скорости (85.1), имеющие место при маневреном полете объекта и обусловленные координатами относительного размещения рассматриваемых информационных систем (ИНС, ДИСС), получим следующие уравнения связи:
скорости (85.1), имеющие место при маневреном полете объекта и обусловленные координатами относительного размещения рассматриваемых информационных систем (ИНС, ДИСС), получим следующие уравнения связи:
Обозначим левые части приведенных уравнений связи через z1 и z2, понимая под ними сигналы измерения, наблюдаемые на фоне некоррелированных шумов измерения V1 и V2 с известными интенсивностями:

Подставляя в (85.32) выражения (85.28) для 
 и (85.8) для
и (85.8) для 
 получим развернутое представление для сигналов измерения z1 и z2:
получим развернутое представление для сигналов измерения z1 и z2:


Приведенные выражения в дальнейшем будем рассматривать, как выражения для расчета сигналов измерения оптимального фильтра-идентификатора параметров комплексной инерциально-доплеровской системы.
В правые части полученных уравнений связи (85.31) вместо 
 подставим соответствующие выражения (85.28) и (85.10). В результате получим следующее развернутое представление матричного выражения вида:
подставим соответствующие выражения (85.28) и (85.10). В результате получим следующее развернутое представление матричного выражения вида:
z=Нх+W,
где х - вектор параметров состояния рассматриваемой системы, Н - матрица наблюдения.
Но прежде, чем выполнить упомянутые выше подстановки, целесообразно выражения для  и
и  (85.28) представить в функции инерциально-доплеровской системы параметров состояния. Для этого вместо Δϕ и Δχ необходимо подставить в них соответствующие соотношения системы (85.3).
(85.28) представить в функции инерциально-доплеровской системы параметров состояния. Для этого вместо Δϕ и Δχ необходимо подставить в них соответствующие соотношения системы (85.3).
В результате получим:

Группируя в приведенных выражениях члены по параметрам состояния αх, αу, αz, получим их следующее представление:


Приведем компактное представление полученных выражений:

где приняты следующие обозначения:
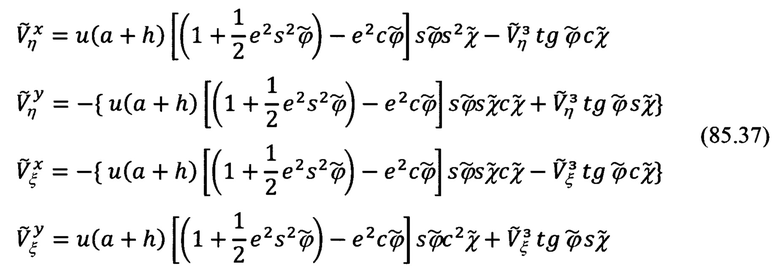
После приведения выражений для 
 (85.28) к алгоритмически целесообразному виду (85.36) могут быть реализованы упомянутые выше операции по приведению правой части уравнений связи (85.31) к виду, удобному для формирования элементов матрицы наблюдения.
(85.28) к алгоритмически целесообразному виду (85.36) могут быть реализованы упомянутые выше операции по приведению правой части уравнений связи (85.31) к виду, удобному для формирования элементов матрицы наблюдения.
Для этого подставим (85.36) и (85.10) в (85.31). В результате получим следующее представление для сигналов измерения:
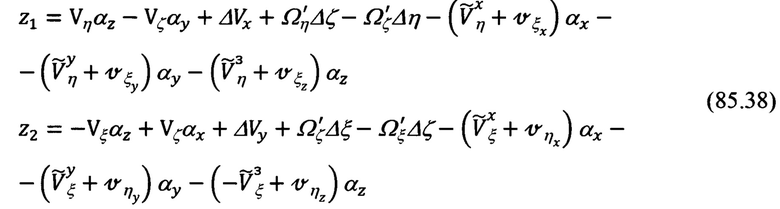
После приведения подобных членов в выражениях для z1 и z2 (85.38) они примут следующий вид:


Для формирования матрицы наблюдения необходимо знать порядок следования параметров состояния рассматриваемой системы в векторе оцениваемых параметров. Приведем его:

В соответствии с (85.39) и (85.40) матрица наблюдения будет иметь следующий вид:

Из полученной матрицы наблюдения следует, что в рассматриваемом режиме инерциально-доплеровской коррекции практически все параметры состояния, кроме нескомпенсированных дрейфов εх, εy, εz, имеют прямую непосредственную связь и, как следствие, влияние на выходные - измеряемые сигналы ИНС, что свидетельствует о потенциальной наблюдаемости указанных параметров.
Способность параметров состояния рассматриваемой системы напрямую влиять на характер изменения выходных сигналов ИНС следует расценивать, как необходимое условие их наблюдаемости.
И главное при этом - это активизировать эти потенциально существующие связи между конкретными параметрами и измеряемыми выходными сигналами. Основным инструментом управления указанными связями является движение объекта, а конкретно, различные виды выполняемых им маневров. И это важно, прежде всего, для управления процедурой устойчивого оценивания всех параметров состояния рассматриваемой системы и, прежде всего, слабонаблюдаемых.
Отличительной особенностью предлагаемого способа коррекции ИНС по измерениям ДИСС, выделяющей его из всего многообразия существующих алгоритмов, является то, что для реализации эффективной процедуры оптимального оценивания и коррекции, включая и коррекцию автономно счисленных координат местоположения объекта, впервые в практике разработки подобных алгоритмов, помимо алгоритмического учета геометрии относительного пространственного размещения комплесируемых систем, при формировании сигналов и матрицы измерения используются кинематические соотношения связи погрешностей счисления основной тройки навигационных параметров Δϕ, Δλ, Δχ и ошибок измерения углов эволюции объекта Δυ, Δγ, Δψг с малыми углами αх, αу, αz рассогласования реального и опорного трехгранников гироплатформы ИНС.
И при этом преследуется, прежде всего, цель обеспечения максимально корректного и математически строгого описания исходной системы, которая работает, исключительно, на достижение заявленной выше основной цели предлагаемого способа коррекции, а именно, на повышение его точности и быстродействия.
Именно указанный подход, при отсутствии точных навигационных и пилотажных параметров позволяет, с точностью до величин первого порядка малости относительно таких параметров, как малые углы αх, αу, αz рассогласования реального и опорного трехгранников гироплатформы ИНС, получить искомые математически строгие и информационно обеспеченные выражения для определения сигналов измерения оптимального идентификатора ошибок ИНС и элементов его матрицы наблюдения.
Наличие точных оценок 
 погрешностей выдерживания вертикали и оценки
погрешностей выдерживания вертикали и оценки  угла азимутального ухода гироплатформы позволяет не только откорректировать составляющие абсолютной линейной скорости Vx, Vy, но и сформировать оценки ошибок
угла азимутального ухода гироплатформы позволяет не только откорректировать составляющие абсолютной линейной скорости Vx, Vy, но и сформировать оценки ошибок  а также
а также  и откорректировать счисленные ИНС навигационные парметры и измеренные углы эволюции объекта.
и откорректировать счисленные ИНС навигационные парметры и измеренные углы эволюции объекта.
Для оценивания всех ошибок ИНС, математическое описание которых представлено в виде расширенной системы взаимосвязанных дифференциальных уравнений первого порядка с вектором параметров состояния вида (85.40), необходимо предусмотреть два участка полета.
На первом горизонтальном участке прямолинейного полета без ускорений осуществляется так называемое «горизонтирование» гироплатформы с оцениванием хорошо наблюдаемых параметров горизонтальных каналов ИНС, таких как ΔVx, ΔVy, αх, αу, εх и согласованное (не раздельное) оценивание слабонаблюдаемых паараметров, типа αz, εy. Длительность этого участка коррекции составляет не более 4,5-5-ти минут, по окончании которого, с целью точного оценивания слабонаблюдаемых параметров, выполняется маневр, типа «змейки», координированного или боевого разворотов.
Длительность маневра, как правило, не превышает 30-40 сек.
В результате его выполнения осуществляется точное оценивание таких параметров состояния, как αz, εу, Δξ, Δη, Δζ, а также доуточнение оценки дрейфа εz азимутального гироскопа.
Точное оценивание координат Δξ, Δη, Δζ местоположения ИНС относительно ДИСС является показателем качества оптимального оценивания в целом.
По окончании маневра завершается активная фаза оптимального оценивания ошибок автономного инерциального счисления, основанная на рекуррентной процедуре обработки, фильтрации и идентификации постоянно обновляющейся входной последовательности сигналов, формируемых по измерениям ИНС и ДИСС.
После чего фильтр-идентификатор переводят в режим долгосрочного - до следующего сеанса коррекции, прогноза полученных оценок, по результатам которого, также, как и в процессе оптимального оценивания осуществляют коррекцию всех счисленных и измеренных ИНС параметров.
Саму процедуру коррекции навигационных  и пилотажных
и пилотажных  параметров, включая и истинный курс
параметров, включая и истинный курс  объекта, осуществляют в соответствии с кинематическими соотношениями (85.3) и (85.4) и с учетом таких удивительных свойств инерциальных систем, построенных на основе принципа невозмущенного измерения ускорений, которые заключаются в их способности опосредованно «запоминать» и «хранить» информацию о текущих значениях ошибок автономного инерциального счисления.
объекта, осуществляют в соответствии с кинематическими соотношениями (85.3) и (85.4) и с учетом таких удивительных свойств инерциальных систем, построенных на основе принципа невозмущенного измерения ускорений, которые заключаются в их способности опосредованно «запоминать» и «хранить» информацию о текущих значениях ошибок автономного инерциального счисления.
Формализованно, эти свойства как раз и представлены приведенными выше соотношениями.
И физический смысл их заключается в том, что текущие значения ошибок Δχ, Δλ, Δϕ (85.3) счисления основной тройки навигационных параметров χ, λ, ϕ и ошибок Δψг, Δγ, Δυ (85.4) измерения текущих углов ψг, γ, υ эволюции объекта могут быть определены по результатам оптимального оценивания таких параметров состояния ИНС, как входящие в (85.3) и (85.4) малые углы αх, αу, αz ухода реальной ГП ИНС (виртуальной ГП для БИНС) относительно ее опорного трехгранника.
Таким образом, располагая текущими значениями оценок  малых углов αх, αу, αz ухода реальной/виртуальной ГП ИНС/БИНС относительно ее опорного трехгранника, полученными в процессе инерциально-доплеровского оценивания, и счисленными/измеренными значениями навигационных ϕ, λ, χ и пилотажных параметров ψг, γ, υ достаточно просто могут быть сформированы оценки
малых углов αх, αу, αz ухода реальной/виртуальной ГП ИНС/БИНС относительно ее опорного трехгранника, полученными в процессе инерциально-доплеровского оценивания, и счисленными/измеренными значениями навигационных ϕ, λ, χ и пилотажных параметров ψг, γ, υ достаточно просто могут быть сформированы оценки  ошибок счисления навигационных параметров и оценки
ошибок счисления навигационных параметров и оценки 

 ошибок измерения углов эволюции объекта, и откорректированы все ошибочно счисленные/измеренные параметры ИНС, включая и истинный курс.
ошибок измерения углов эволюции объекта, и откорректированы все ошибочно счисленные/измеренные параметры ИНС, включая и истинный курс.
При этом коррекцию истинного курса ψи объекта осуществляют по той же схеме, что и представленные выше навигационные и пилотажные параметры.
В соответствии с (85.3) и (85.4) можно показать, что текущее значение оценки  ошибки определения истинного курса объекта будет равно:
ошибки определения истинного курса объекта будет равно:

Следовательно, откорректированное значение истинного курса  может быть определено в соответствии с выражением:
может быть определено в соответствии с выражением:

Из представленной процедуры коррекции следует, что оценка ошибки  определения истинного курса объекта не зависит от угла αz азимутального ухода ГП ИНС, являющегося следствием нескомпенисрованного ухода εz ее ГП.
определения истинного курса объекта не зависит от угла αz азимутального ухода ГП ИНС, являющегося следствием нескомпенисрованного ухода εz ее ГП.
Из приведенного описания заявляемого способа формирования воздушно-скоростных параметров маневренного объекта следует, что суть предлагаемого способа раскрыта и технический результат изобретения достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ БАРОИНЕРЦИАЛЬНОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2713583C1 |
| ЗАЩИЩЕННЫЙ СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2019 |
|
RU2713584C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| СПОСОБ ОПТИМАЛЬНОГО ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И ЕЁ КОРРЕКЦИИ ПО НЕПОДВИЖНОМУ НАЗЕМНОМУ ОРИЕНТИРУ С ИЗВЕСТНЫМИ ГЕОГРАФИЧЕСКИМИ КООРДИНАТАМИ | 2019 |
|
RU2713582C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ МОДИФИЦИРОВАННОЙ, ИНВАРИАНТНОЙ К РЕЛЬЕФУ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ УГЛОМЕСТНОЙ ПРОЦЕДУРЫ РАСЧЁТА ДАЛЬНОСТИ | 2016 |
|
RU2617373C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ СУБОПТИМАЛЬНОЙ ПРОЦЕДУРЫ УГЛОВОГО СОПРОВОЖДЕНИЯ | 2016 |
|
RU2621374C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПРИЦЕЛИВАНИЯ ПО ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2016 |
|
RU2629130C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2461801C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
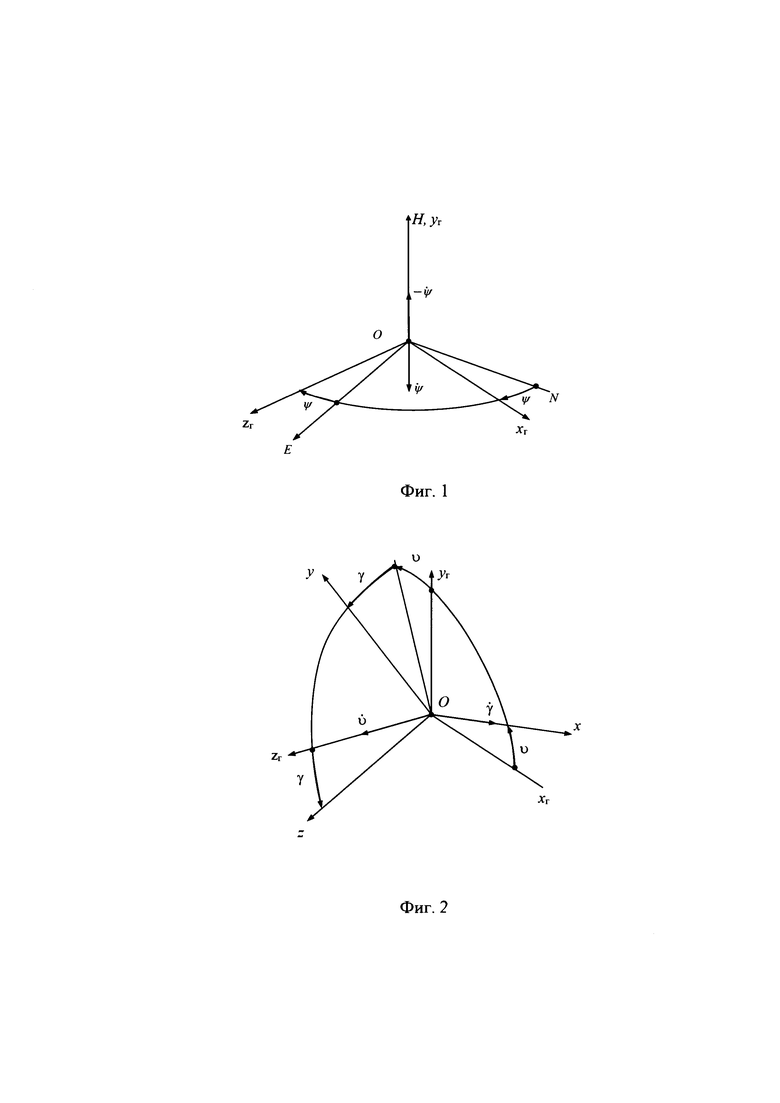



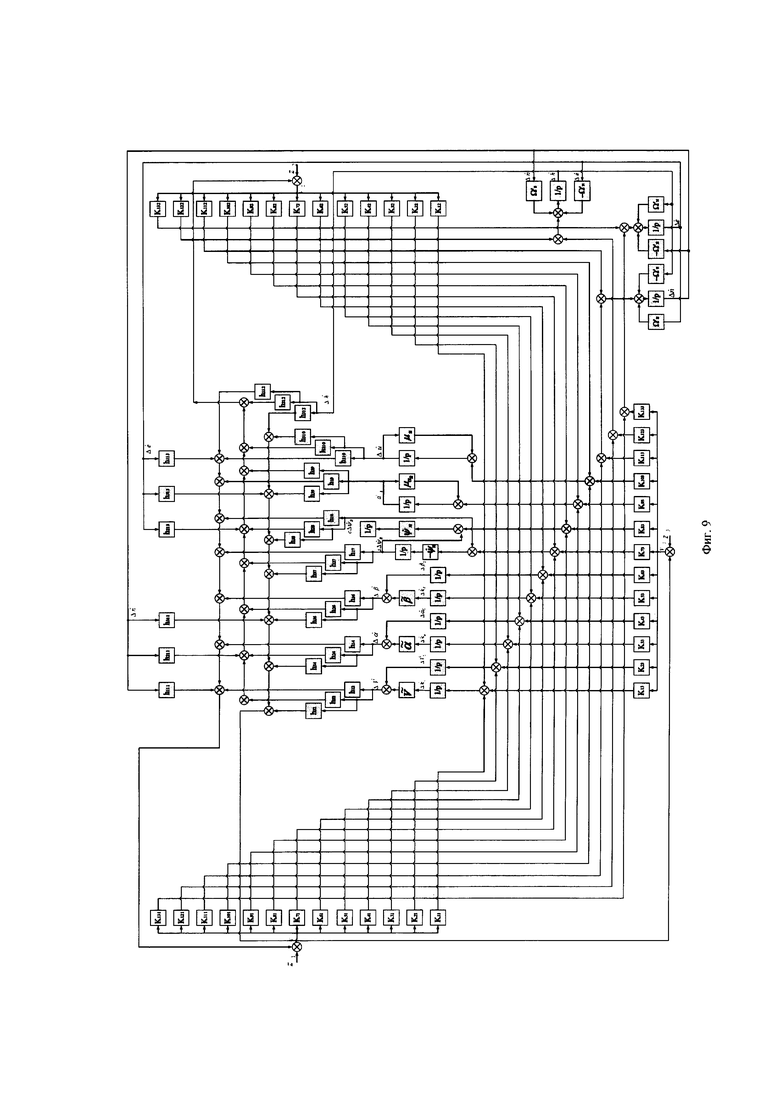
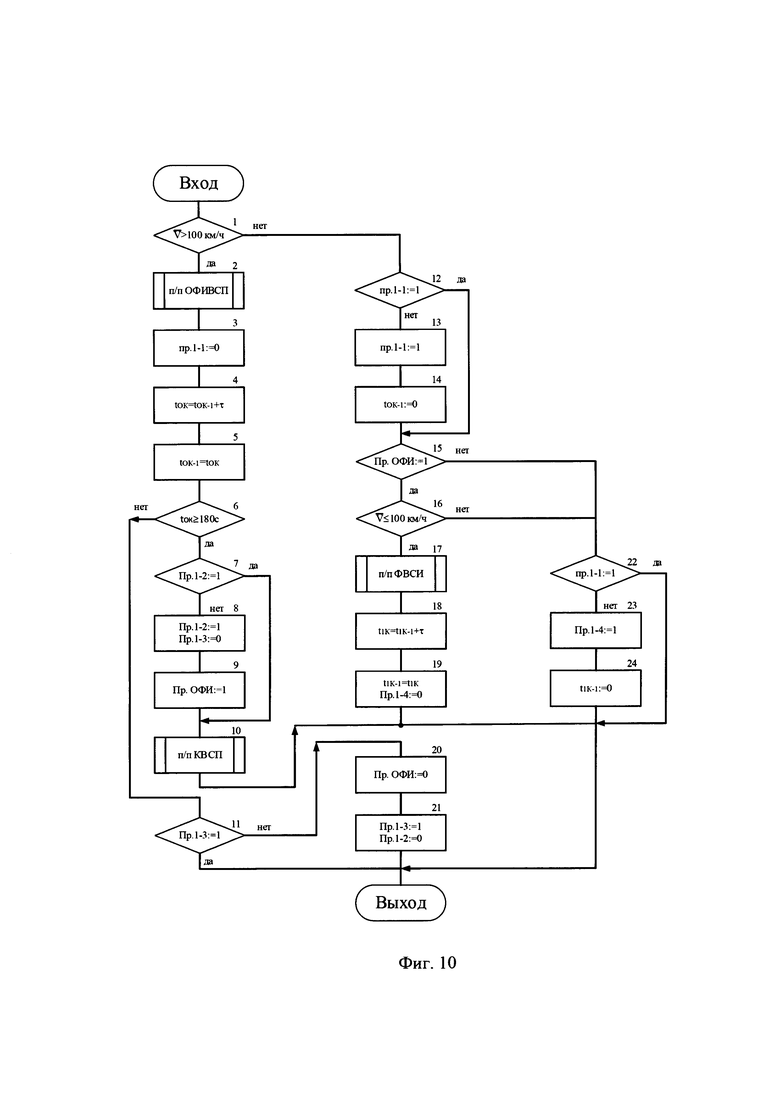
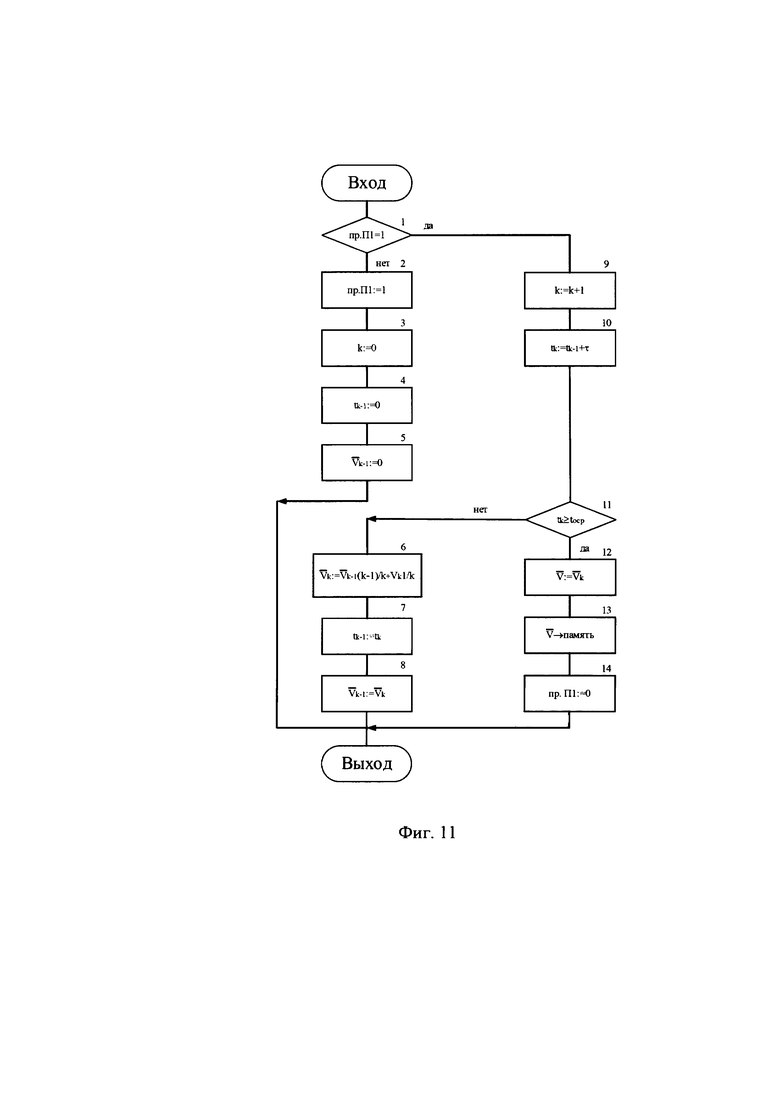
Изобретение относится к области измерительных информационных систем и комплексов боевых летательных аппаратов ЛА. Предложенный способ формирования воздушно-скоростных параметров маневренного объекта заключается в совместной обработке информации, включающей измеряемые системой воздушных сигналов и датчиком углов атаки и скольжения текущие значения модуля воздушной скорости и углов атаки и скольжения, ориентации объекта относительно связанной с ним системы координат, текущее расчетное значение модуля скорости ветра, а также неизвестные, подлежащие оцениванию, функциональные параметры, формируемые по результатам инерциально-доплеровской коррекции углов истинного курса, крена и тангажа объекта и модуля путевой скорости объекта с определяющими его текущую пространственную ориентацию относительно собственной системы координат. Техническим результатом изобретения является расширение функциональных возможностей современной авиационной техники и повышение точности и эффективности ее пилотирования и боевого применения во всех условиях эксплуатации. 11 ил.
Способ формирования воздушно-скоростных параметров маневренного объекта, основанный на совместной обработке первичной воздушно-скоростной информации, включающей измеряемые системой воздушных сигналов (СВС) и датчиком углов атаки и скольжения (ДУАС) текущие значения модуля воздушной скорости V и углов атаки α и скольжения β, его ориентации относительно связанной с объектом системы координат (ССК) Oxyz, текущее расчетное значение модуля u скорости ветра и неизвестные, подлежащие оцениванию, функциональные параметры cosΔψB, sinΔψB, αB его пространственной ориентации относительно горизонтированной системы координат (ГСК) OxГyГzГ объекта, и формируемых по результатам инерциально-доплеровской коррекции углов истинного курса ψи, крена γ и тангажа υ объекта, составляющих  и модуля
и модуля  его путевой скорости с определяющими его текущую пространственную ориентацию относительно ГСК OxГyГzГ объекта расчетными значениями углов сноса αСН и наклона траектории αНТ, по результатам которой формируют полный массив воздушно-скоростной информации, отличающийся тем, что используемую модель ошибок воздушно-скоростных параметров расширяют за счет включения в нее математического описания координат Δn, Δh, Δе размещения (на объекте) приемника воздушного давления (ПВД) относительно инерциальной навигационной системы (ИНС), которое представляют в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси географического сопровождающего трехгранника (ГСТ) ONHE, чем обеспечивают корректное формирование системы из трех физически обоснованных и математически строгих уравнений связи, на основе которых получают расчетные выражения для входных сигналов z1, z2, z3 оптимального фильтра-идентификатора воздушно-скоростных параметров и элементов его матрицы наблюдения, реализуя замкнутую, встроенную в структуру оптимального оценивания, процедуру автоматического учета кинематической разницы путевой скорости, измеряемой комплексной инерциально-доплеровской системой в месте размещения ИНС и ее значением, соответствующим месту установки ПВД, кардинально сужая круг возможных причин расходимости процедуры оптимального оценивания воздушно-скоростных параметров в штатных для СВС и ДУАС режимах маневренного полета, дополнительно при формировании воздушно-скоростных уравнений связи используют прием замены идеальных значений xj воздушно-скоростных параметров их физически адекватным представлением вида
его путевой скорости с определяющими его текущую пространственную ориентацию относительно ГСК OxГyГzГ объекта расчетными значениями углов сноса αСН и наклона траектории αНТ, по результатам которой формируют полный массив воздушно-скоростной информации, отличающийся тем, что используемую модель ошибок воздушно-скоростных параметров расширяют за счет включения в нее математического описания координат Δn, Δh, Δе размещения (на объекте) приемника воздушного давления (ПВД) относительно инерциальной навигационной системы (ИНС), которое представляют в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси географического сопровождающего трехгранника (ГСТ) ONHE, чем обеспечивают корректное формирование системы из трех физически обоснованных и математически строгих уравнений связи, на основе которых получают расчетные выражения для входных сигналов z1, z2, z3 оптимального фильтра-идентификатора воздушно-скоростных параметров и элементов его матрицы наблюдения, реализуя замкнутую, встроенную в структуру оптимального оценивания, процедуру автоматического учета кинематической разницы путевой скорости, измеряемой комплексной инерциально-доплеровской системой в месте размещения ИНС и ее значением, соответствующим месту установки ПВД, кардинально сужая круг возможных причин расходимости процедуры оптимального оценивания воздушно-скоростных параметров в штатных для СВС и ДУАС режимах маневренного полета, дополнительно при формировании воздушно-скоростных уравнений связи используют прием замены идеальных значений xj воздушно-скоростных параметров их физически адекватным представлением вида  и после переформатирования полученных уравнений связи приводят их к виду, удобному для формирования сигналов измерения zi и элементов hij (i=1-3, j=1-13) матрицы наблюдения, для которых характерно построчное выполнение равенств вида
и после переформатирования полученных уравнений связи приводят их к виду, удобному для формирования сигналов измерения zi и элементов hij (i=1-3, j=1-13) матрицы наблюдения, для которых характерно построчное выполнение равенств вида  а при математическом описании ошибок измерения воздушно-скоростных параметров, типа ΔV, Δα, Δβ, используют легко реализуемые и подкрепленные опытными данными модели, которые, в совокупности с моделью, описывающей характер изменения пространственной ориентации скорости ветра, обеспечивают гарантированную наблюдаемость, быстродействие и точность оптимального оценивания всех воздушно-скоростных параметров в штатных для СВС и ДУАС режимах маневренного полета, при этом измеряемую ИНС навигационную и пилотажную информацию формируют в процессе и по результатам инерциально-доплеровского оценивания, при реализации которого традиционную для ИНС модель ошибок расширяют за счет включения в нее дифференциальных уравнений, описывающих характер изменения координат Δξ, Δη, Δζ, размещения ИНС относительно доплеровского измерителя составляющих скорости (ДИСС) в проекциях на оси опорного трехгранника гироплатформы ИНС Оξηζ, чем обеспечивают математически строгое описание комплексной инерциально-доплеровской системы и устраняя одну из основных причин расходимости ее фильтра в маневренном полете, достигают повышенные характеристики точности оценивания ошибок ИНС и коррекции ее выходной информации, при реализации которой, также, как и при синтезе самой процедуры оптимального инерциально-доплеровского оценивания, основанной на комплексной обработке счисленных ИНС горизонтальных составляющих Vx, Vy абсолютной линейной скорости объекта, географической широты
а при математическом описании ошибок измерения воздушно-скоростных параметров, типа ΔV, Δα, Δβ, используют легко реализуемые и подкрепленные опытными данными модели, которые, в совокупности с моделью, описывающей характер изменения пространственной ориентации скорости ветра, обеспечивают гарантированную наблюдаемость, быстродействие и точность оптимального оценивания всех воздушно-скоростных параметров в штатных для СВС и ДУАС режимах маневренного полета, при этом измеряемую ИНС навигационную и пилотажную информацию формируют в процессе и по результатам инерциально-доплеровского оценивания, при реализации которого традиционную для ИНС модель ошибок расширяют за счет включения в нее дифференциальных уравнений, описывающих характер изменения координат Δξ, Δη, Δζ, размещения ИНС относительно доплеровского измерителя составляющих скорости (ДИСС) в проекциях на оси опорного трехгранника гироплатформы ИНС Оξηζ, чем обеспечивают математически строгое описание комплексной инерциально-доплеровской системы и устраняя одну из основных причин расходимости ее фильтра в маневренном полете, достигают повышенные характеристики точности оценивания ошибок ИНС и коррекции ее выходной информации, при реализации которой, также, как и при синтезе самой процедуры оптимального инерциально-доплеровского оценивания, основанной на комплексной обработке счисленных ИНС горизонтальных составляющих Vx, Vy абсолютной линейной скорости объекта, географической широты  его текущего местоположения, угла
его текущего местоположения, угла  азимутальной ориентации опорного трехгранника Оξηζ, ее гироплатформы, измеренных углов гироскопического курса
азимутальной ориентации опорного трехгранника Оξηζ, ее гироплатформы, измеренных углов гироскопического курса  крена
крена  и тангажа
и тангажа  объекта, и доплеровских составляющих
объекта, и доплеровских составляющих  путевой скорости, вместо идеальных значений инерциальных параметров xj используют их адекватное представление вида
путевой скорости, вместо идеальных значений инерциальных параметров xj используют их адекватное представление вида  и кинематические соотношения связи ошибок основной тройки навигационных
и кинематические соотношения связи ошибок основной тройки навигационных  и пилотажных
и пилотажных  параметров с малыми углами αх, αу, αz рассогласования реального и опорного трехгранников гироплатформы ИНС, а сравнивая счисленные ИНС горизонтальные составляющие Vx, Vy абсолютной линейной скорости и аналогичные комплексные компоненты
параметров с малыми углами αх, αу, αz рассогласования реального и опорного трехгранников гироплатформы ИНС, а сравнивая счисленные ИНС горизонтальные составляющие Vx, Vy абсолютной линейной скорости и аналогичные комплексные компоненты  абсолютной скорости, получают скоростные инерциально-доплеровские уравнения связи, из которых в функции измеренных навигационных и пилотажных параметров ИНС формируют расчетные выражения для входных сигналов фильтра-идентификатора и элементов его матрицы наблюдения, чем обеспечивают синтез математически замкнутой унифицированной процедуры автоматического, встроенного в структуру оптимального оценивания, учета ошибок счисления/измерения навигационной и пилотажной информации и ее эффективной коррекции как в процессе оптимального оценивания ошибок ИНС, так и по результатам прогноза, при этом восстановление полного массива воздушно-скоростной информации в режиме малых скоростей и висения осуществляют при справедливости гипотезы о стационарности скорости ветра и реализуют посредством решения обратной задачи пространственного треугольника скоростей.
абсолютной скорости, получают скоростные инерциально-доплеровские уравнения связи, из которых в функции измеренных навигационных и пилотажных параметров ИНС формируют расчетные выражения для входных сигналов фильтра-идентификатора и элементов его матрицы наблюдения, чем обеспечивают синтез математически замкнутой унифицированной процедуры автоматического, встроенного в структуру оптимального оценивания, учета ошибок счисления/измерения навигационной и пилотажной информации и ее эффективной коррекции как в процессе оптимального оценивания ошибок ИНС, так и по результатам прогноза, при этом восстановление полного массива воздушно-скоростной информации в режиме малых скоростей и висения осуществляют при справедливости гипотезы о стационарности скорости ветра и реализуют посредством решения обратной задачи пространственного треугольника скоростей.
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ ПОЛЕТА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2006 |
|
RU2314541C1 |
| АЭРОМЕХАНИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СОСТОЯНИЯ ВЕРТОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352914C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| CN 102716889 B, 14.01.2015 | |||
| FR 2891368 B1, 30.11.2007. | |||

