Изобретение относится к области комплексных навигационных систем, систем управления и наведения летательных аппаратов (ЛА).
Известен способ оптимального оценивания и коррекции инерциальной информации по измерениям спутниковой навигационной системы (СНС), представленный в учебном пособии В.В. Мелешко, О.И. Нестеренко «Бесплатформенные инерциальные навигационные системы», К., «Полимед-сервис», 2011 г [1].
Указанный способ основан на использовании процедуры оптимальной фильтрации Калмана. Входными сигналами фильтра-идентификатора ошибок инерциальной навигационной системы (ИНС) являются разности географических координат местоположения и составляющих абсолютной линейной скорости, измеренных ИНС и сформированных по измерениям СНС.
Указанные сигналы после их оптимальной обработки, включающей как фильтрацию, так и идентификацию, в соответствии с математическим описанием исходной системы, во-первых, практически «очищаются от высокочастотных ошибок СНС», а во-вторых, разделяются на известные, математически описанные составляющие ошибок ИНС.
При этом ошибки курсового канала ИНС не оцениваются и измеренные им параметры не корректируются (см. [1], стр. 97-107).
В соответствии с описанием рассматриваемого способа, корректируются только текущие значения географических координат местоположения  ,
,  , составляющие Vx, Vy абсолютной линейной скорости и углы крена
, составляющие Vx, Vy абсолютной линейной скорости и углы крена  и тангажа
и тангажа  объекта, причем последние - в случае, когда диапазон их изменения не превышает 5-10-ти градусов.
объекта, причем последние - в случае, когда диапазон их изменения не превышает 5-10-ти градусов.
Представлены два варианта алгоритмической реализации указанного способа коррекции, а именно, вариант с разомкнутой схемой комплексирования и вариант с замкнутой схемой коррекции.
Если исходить из приведенных в [1] материалов и сделанных там выводов, то следует отметить следующие недостатки рассматриваемого способа коррекции:
- отсутствие возможности оценивания параметров курсового канала ИНС и коррекции гироскопического курса  , расчетного значения угла
, расчетного значения угла  азимутальной ориентации опорного трехгранника гироплатформы (ГП) ИНС и истинного курса
азимутальной ориентации опорного трехгранника гироплатформы (ГП) ИНС и истинного курса  объекта (см. [1], стр. 98);
объекта (см. [1], стр. 98);
- отсутствие возможности реализации алгоритмической процедуры коррекции измеряемых ИНС углов эволюции объекта во всем диапазоне их изменения.
Указанные недостатки не следует рассматривать, как недостатки, объективно присущие описанному выше способу коррекции.
Будет абсолютно правильным расценивать их, как результат его недоисследованных возможностей.
И это действительно так, поскольку на протяжении ряда десятилетий, как в России, так и за рубежом для оценивания угла αz азимутального ухода ГП ИНС/БИНС и дрейфа εу гироскопа продольного канала используют такой методически доступный и эффективный прием, как высокодинамичный маневр, типа «змейки», координированного или боевого разворотов.
Для обоснования физической целесообразности и необходимости использования указанного приема из известных открытых источников можно сослаться на «Дополнение к задаче выставки на подвижном основании» Л.Г. Клибанова и В.Л. Леонидова (см. [2], стр. 155-162) в монографии А. Липтона «Выставка инерциальных систем на подвижном основании», «Наука», М., 1971 г [2], в котором впервые в практике решения подобных задач рассматривается редуцированная процедура оптимального оценивания в задаче согласования ГП двух инерциальных систем - базовой и выставляемой.
Рассмотрение ведется применительно к решению задачи начальной выставки ИНС ракеты по скоростной информации, измеряемой ИНС носителя, в котором ее авторы приводят то основное, что побудило обратиться к указанному источнику, а именно: «… для обеспечения наилучшего оценивания существенно влияние матрицы состояния системы (читай, модели ошибок ИНС), зависящей от траектории (параметров) движения объекта». И далее, авторы настоящего дополнения ссылаются на известную в инженерных кругах статью Sutherland A. «The Kalman Filter in Transfer Alignment of Inertial Guidance Sistems», journal Spacecraft and Rockets, vol. 5. No 10. 1968. - Сатерлэнд А. «Фильтр Калмана в задаче начальной выставки ИНС в полете», в которой выбираются оптимальные, с точки зрения наилучшего оценивания, маневры объекта при выставке инерциальных систем в полете (см. [2], последний абзац стр. 162).
Учитывая это, будет справедливым считать, что в представленном выше способе оптимального оценивания и коррекции ИНС [1], все параметры ее курсового канала являются не ненаблюдаемыми, а слабонаблюдаемыми, эффективное и раздельное оценивание которых требует выполнения соответствующего маневра.
Поэтому указанный способ коррекции ИНС можно считать прототипом предлагаемого способа оптимального оценивания ошибок инерциальной информации и ее коррекции по измерениям СНС.
Формализуя приведенное выше его описание [1], [2], излагая его в терминах используемых при решении подобных задач математических процедур с акцентом на выполняемые при этом физические операции, приведем его в следующем виде.
Способ оптимального оценивания и коррекции инерциальной информации по измерениям СНС, основанный на процедуре оптимальной фильтрации и идентификации сигналов измерения, которые формируют путем сравнения одноименных географических координат ϕ, λ текущего местоположения, счисленных ИНС и измеренных СНС, а также горизонтальных составляющих Vx, Vy абсолютной линейной скорости, измеренных ИНС и аналогичных составляющих, сформированных по измерениям СНС, а само оценивание осуществляют в полном соответствии с математическим описанием исходной системы, при этом полет организуют таким образом, что после 270 секунд горизонтального прямолинейного полета, осуществляют маневр, типа «змейки», координированного или боевого разворотов, после чего активную фазу процедуры оптимальной фильтрации и идентификации дискретной последовательности сигналов измерения приостанавливают и фильтр-идентификатор переводят в режим долгосрочного - до следующего сеанса коррекции, прогноза с начальными условиями, определяемыми значениями оценок на момент завершения активной фазы, и текущими значениями коэффициентов модели сообщения (модели ошибок ИНС), при этом коррекцию выходных параметров ИНС - географических координат местоположения и составляющих абсолютной линейной скорости, вследствие закрытости и недоступности ключевых управленческих входов каналов коррекции ИНС, реализуют в разомкнутом контуре с использованием текущих прогнозируемых значений оценок.
Основными недостатками наиболее близкого аналога являются:
- отсутствие в модели ошибок ИНС математического описания координат относительного размещения комплексируемых систем;
- при формировании матрицы наблюдения не учитывыается погрешность счисления угла азимутальной ориентации опорного трехгранника ГП ИНС в функции малых углов ее ухода;
- при выполнении традиционных для рассматриваемого режима коррекции маневров, типа «змейки», координированного или боевого разворотов, вместо ожидаемого, эффективного оценивания всех параметров состояния и, в первую очередь, слабонаблюдаемых, таких, как угол αz азимутального ухода ГП и дрейф εy гироскопа продольного канала, с целью чего и осуществляется маневр, имеет место абсолютно обратная картина расходимости последних и нарушение сходимости остальных;
- не характерные для процедуры оптимального оценивания точности и быстродействие, что свидетельствует о неэффективности процедуры оптимальной обработки и коррекции в целом.
Технический результат предлагаемого изобретения - повышение точности и быстродействия оптимального оценивания и коррекции всех измеряемых ИНС навигационных и пилотажных параметров в обеспечение эффективного решения навигационных, боевых и специальных задач.
Указанный технический результат достигается за счет того, что:
1. В способе оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы, включающем использование традиционной процедуры оптимальной фильтрации и идентификации Калмана, для чего сигналы измерения оптимального фильтра-идентификатора формируют посредством сравнения одноименных географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости в проекциях на оси опорного трехгранника ГП ИНС счисленных ИНС и сформированных по измерениям СНС, а его структуру синтезируют в соответствии с традиционной для ИНС моделью ошибок, при этом характер полета методически организуют таким образом, что, после 270-ти секунд прямолинейного горизонтального полета, на котором реализуют точное «горизонтирование» гироплатформы и оценивают хорошо наблюдаемые параметры горизонтальных каналов ИНС, осуществляют маневр, типа «змейки», координированного или боевого разворотов, после чего активную фазу процедуры оптимальной фильтрации и идентификации приостанавливают и фильтр-идентификатор переводят в режим долгосрочного - до следующего сеанса коррекции, прогноза, для реализации которого сигналы измерения обнуляют, а значения оценок на момент завершения активной фазы процедуры оценивания используют в качестве начальных условий в процедуре прогноза, при этом сам прогноз осуществляют в соответствии с дискретными уравнениями расчета априорных оценок ошибок ИНС, а коррекцию выходных параметров ИНС - географических координат местоположения и составляющих абсолютной линейной скорости, реализуют в разомкнутой схеме ИНС, для чего используют текущие прогнозируемые значения оценок параметров состояния ИНС, дополнительно используемую при решении подобных задач модель ошибок ИНС расширяют за счет включения в нее математического описания координат ее местоположения относительно антенного блока СНС, и представляют их в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси опорного трехгранника ГП ИНС, которые одновременно описывают аддитивно входящие в скоростные сигналы измерения кинематические составляющие относительной скорости движения ИНС, а при формировании сигналов измерения и матрицы наблюдения, используют кинематические соотношения, связывающие ошибки Δϕ, Δλ, Δχ счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС с погрешностями выдерживания вертикали αх, αy и углом αz азимутального ухода ГП ИНС, чем, с точностью до величин второго порядка малости относительно таких параметров, как Δϕ, Δλ, αх, αy, αz, обеспечивают определение текущих значений элементов матриц сообщения и наблюдения, и реализуют точное и эффективное оценивание и последующий прогноз таких ошибок автономного инерциального счисления, как  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , при этом коррекцию автономно счисленных значений географических координат
, при этом коррекцию автономно счисленных значений географических координат  ,
,  текущего местоположения и составляющих
текущего местоположения и составляющих  ,
,  абсолютной линейной скорости осуществляют в соответствии с общепринятыми выражениями, для чего используют текущие спрогнозированные значения оценок
абсолютной линейной скорости осуществляют в соответствии с общепринятыми выражениями, для чего используют текущие спрогнозированные значения оценок  ,
,  , , и малых углов , , , а для коррекции истинного курса рассчитывают откорректированное значение угла
, , и малых углов , , , а для коррекции истинного курса рассчитывают откорректированное значение угла  азимутальной ориентации опорного трехгранника ГП в функции оцененных значений
азимутальной ориентации опорного трехгранника ГП в функции оцененных значений  и
и  и вычисляют откорректированное значение гироскопического курса
и вычисляют откорректированное значение гироскопического курса  в функции оценок и погрешности
в функции оценок и погрешности  измерения угла крена
измерения угла крена  , которую определяют расчетным путем в функции текущих, спрогнозированных значений оценок , и измеренных/откорректированных углов гироскопического курса ψг и тангажа υ, после чего рассчитывают истинный курс ψи, как сумму оценок
, которую определяют расчетным путем в функции текущих, спрогнозированных значений оценок , и измеренных/откорректированных углов гироскопического курса ψг и тангажа υ, после чего рассчитывают истинный курс ψи, как сумму оценок  и
и  .
.
2. В способе оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы по п. 1, дополнительно после завершения маневра и выхода на установившийся послеманевренный курс, факт чего устанавливают по осредненному на 5-секундном временном интервале значению составляющей  относительной угловой скорости объекта, которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-ой секунды после начала коррекции, при этом, если указанное среднее значение на выходе из маневра - начиная с 300-ой секунды, не превышает
относительной угловой скорости объекта, которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-ой секунды после начала коррекции, при этом, если указанное среднее значение на выходе из маневра - начиная с 300-ой секунды, не превышает  рад/с (~3 град/мин), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок
рад/с (~3 град/мин), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок  ,
,  ,
,  координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом текущие значения оценок
координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом текущие значения оценок  ,
,  ,
,  в соответствии с рекуррентной процедурой нахождения среднего, осредняют на 3-секундном интервале времени, после чего осредненные значения оценок
в соответствии с рекуррентной процедурой нахождения среднего, осредняют на 3-секундном интервале времени, после чего осредненные значения оценок  ,
,  ,
,  сравнивают с хранящимися в БЦВМ конструктивными значениями указанных координат и при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму полноценного прогноза и коррекции, в противном случае - формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных, на момент остановки оценивания значений оценок
сравнивают с хранящимися в БЦВМ конструктивными значениями указанных координат и при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму полноценного прогноза и коррекции, в противном случае - формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных, на момент остановки оценивания значений оценок  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Приведем перечень и описание фигур, которые потребуются при осуществлении предлагаемого изобретения.
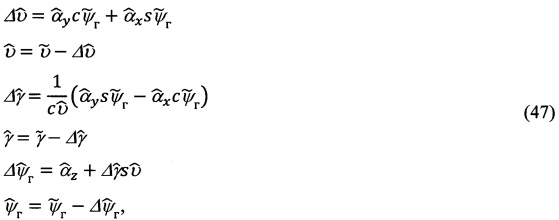
На фиг. 1 представлена схема относительного размещения ИНС1, ИНС2 и антенного блока (АБ) СНС на объекте. В качестве параметров, определяющих размещение указанных систем на объекте, приняты векторы  ,
,  и
и  , определяющие местоположение соответственно ИНС1, ИНС2 и ДИСС относительно начала (точка О) связанной с объектом системы координат (ССК) Oxyz.
, определяющие местоположение соответственно ИНС1, ИНС2 и ДИСС относительно начала (точка О) связанной с объектом системы координат (ССК) Oxyz.
На схеме также представлены векторы  и
и  , определяющие местоположение ИНС1 и ИНС2 соответственно относительно ДИСС, а также вектор
, определяющие местоположение ИНС1 и ИНС2 соответственно относительно ДИСС, а также вектор  положения ИНС2 относительно ИНС1.
положения ИНС2 относительно ИНС1.
Под ИНС2 следует понимать резервную ИНС, которая введена для общности рассмотрения.
 - вектор путевой скорости объекта.
- вектор путевой скорости объекта.
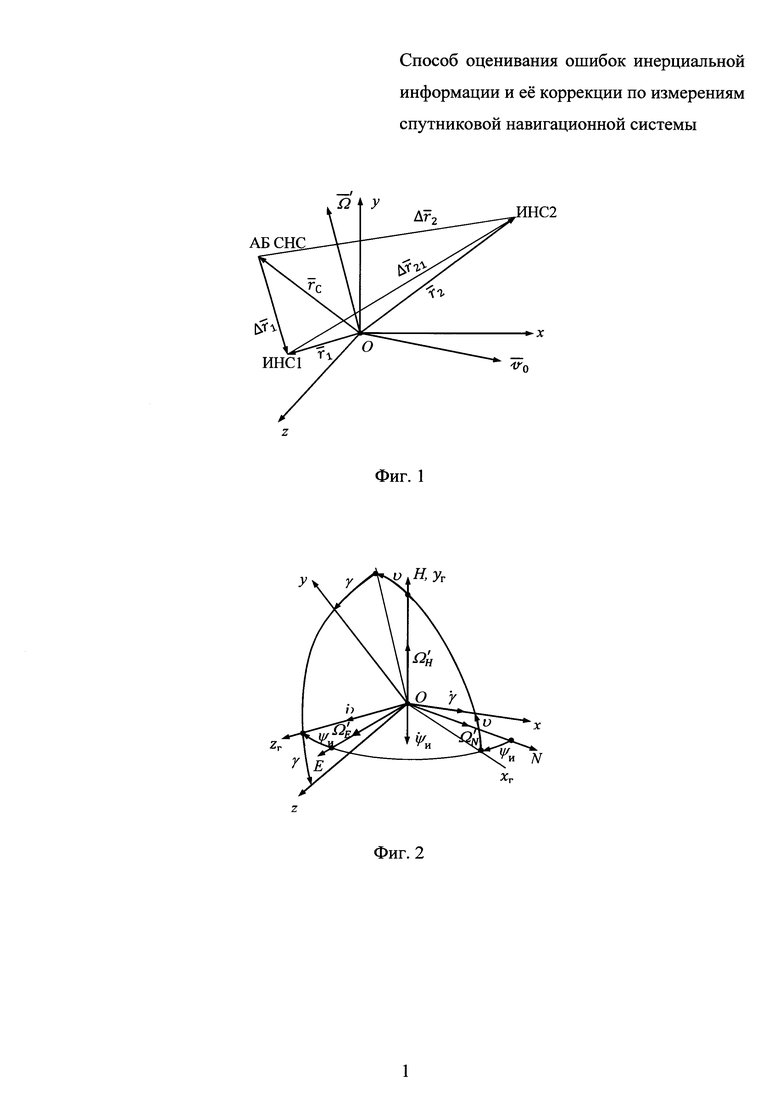
На фиг. 2 приведена взаимная ориентация географического сопровождающего трехгранника (ГСТ) ONHE и ССК Oxyz.
Их рассогласование определяется углами истинного курса ψи, тангажа и υ крена γ объекта.
Переход от осей ГСТ ONHE к осям ССК Oxyz осуществляется посредством трех последовательных поворотов на углы ψи, υ и γ с угловыми скоростями  ,
,  и
и  .
.
Приведенное на фиг. 2 направление отсчета углов ψи, υ и γ и угловых скоростей  ,
,  и
и  их изменения является положительным.
их изменения является положительным.
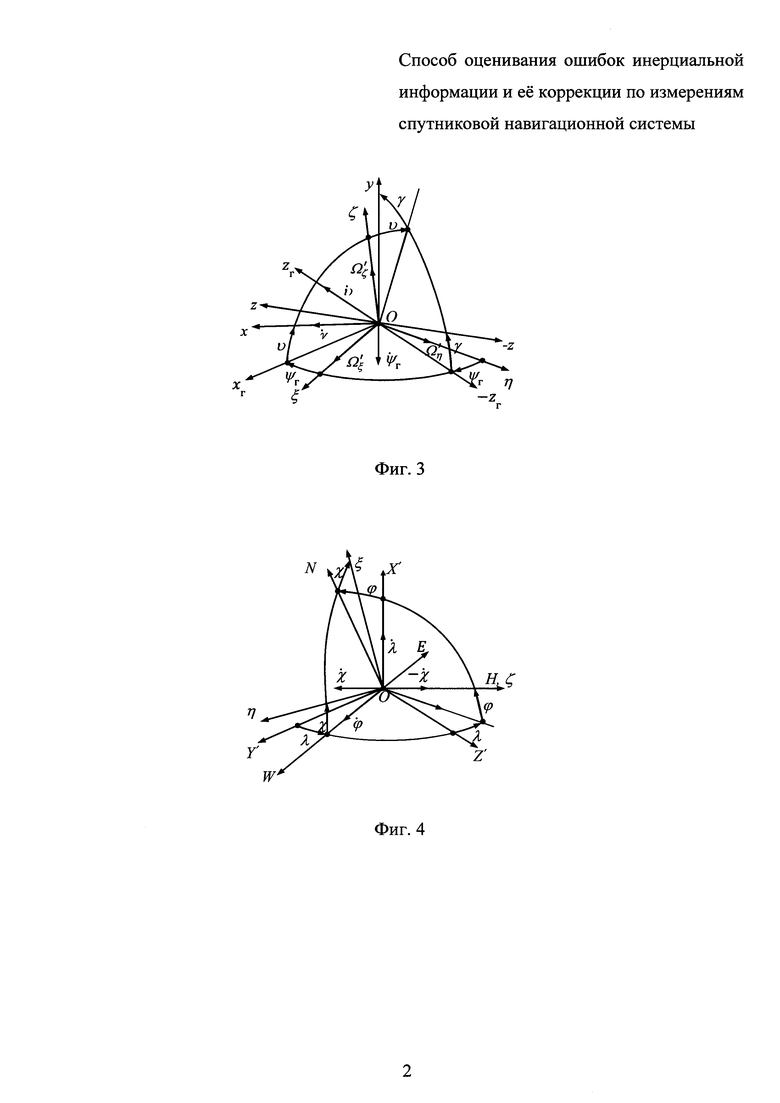
На фиг. 3 приведена взаимная ориентация опорного трехгранника гироплатформы (ОТГП) ОξηζИНС и ССК Oxyz.
Их рассогласование определяется углами гироскопического курса ψг, тангажа и υ крена γ объекта.
Переход от осей ОТГП Оξηζ ИНС к осям ССК Oxyz осуществляется посредством трех последовательных поворотов на углы ψг, υ и γ с угловыми скоростями  ,
,  и
и  .
.
Приведенное на фиг. 3 направление отсчета углов ψг, υ и γ и угловых скоростей , и является положительным.
На фиг. 4 приведена взаимная ориентация гринвичской системы координат (ГСК) OX'Y'Z', ОТГП ОξηζИНС и ГСТ ONHE.
Их рассогласование определяется углами географической долготы λ, широты ϕ и углом χ азимутальной ориентации ОТГП ОξηζИНС.
Переход от осей ГСК О X'Y'Z' к осям ГСТ ONHE и далее к осям ОТГП Оξηζ осуществляется посредством последовательных поворотов на углы λ и ϕ и далее на угол χ (см. Фиг. 4) с угловыми скоростями  ,
,  , и
, и  .
.
Приведенное на фиг. 4 направление отсчета углов λ, ϕ и χ и угловых скоростей , , и их изменения следует считать положительным.
С целью раскрытия физической сути и математического содержания предлагаемых алгоритмических и математических решений приведем их подробное описание.
Но прежде - обоснование необходимости алгоритмического учета относительного размещения задействованных в инерциально-спутниковой коррекции информационных систем ИНС и СНС.
При разработке алгоритма оптимальной коррекции ИНС по измерениям СНС исключительно важное значение имеет вопрос методического обеспечения раздельного наблюдения и оценивания всех, без исключения, параметров состояния ИНС и, в первую очередь, слабоонаблюдаемых, таких, как угол αz азимутального рассогласования реального и опорного трехгранников в гироплатформы ГП ИНС и нескомпенсированного ухода - дрейфа εy гироскопа продольного канала. В лабораторных условиях и для случая неподвижного объекта указанные параметры ненаблюдаемы и, как следствие, раздельно не оцениваются.
В условиях же движущегося объекта для обеспечения их наблюдаемости нет никакой необходимости в реализации каких-то дополнительных методических решений. И это связано, исключительно, с тем, что само движение объекта является достаточно эффективным инструментом, позволяющим управлять динамикой изменения ошибок выходных параметров ИНС от всех, без исключения, параметров состояния и, как следствие, их наблюдаемостью.
При этом, чтобы обеспечить максимальную эффективность связей всех параметров состояния с выходными сигналами ИНС, такими, как географическая широта ϕ и долгота λ, и горизонтальные составляющие Vx, Vy абсолютной скорости, необходимо выполнение маневров, типа координированного разворота, «змейки» или боевого разворота.
Выполнение упомянутых выше маневров, сопровождающихся достаточно интенсивным изменением угловой и пространственной ориентации объекта и, как следствие, высокодинамичным изменением составляющих его угловой и путевой скорости, при различном конструктивном размещении задействованных в рассматриваемых режимах коррекции информационных систем, приводят к появлению в сигналах измерения так называемых кинематических составляющих скорости.
Указанные составляющие скорости, будучи математически не описанными, и, как следствие, алгоритмически неучтенными, а это действительно так, вместо методически обоснованного и ожидаемого оценивания слабонаблюдаемых параметров приводят к совершенно обратному результату, а именно, к расходимости процедуры их оценивания.
Игнорирование спецификой этого явления приводит к таким выводам, типа: «курсовые ошибки хорошо оцениваются при наличии двух участков коррекции по 5…10 мин каждый, разделенных маневром по скорости и/или курсу» (см. Научно-технический журнал «Инженерная физика» №12/2012, стр. 49, 16 строка сверху).
В действительности курсовая ошибка оценивается хорошо, если она оценивается за 0,5-1 мин одного из упомянутых выше маневров.
При этом «наличие двух участков коррекции по 5…10 мин каждый» не имеет никакого физического объяснения.
Для качественного оценивания параметров горизонтальных каналов ИНС необходим участок коррекции длительностью, не более 4-4,5 минут, после чего осуществляется маневр, обеспечивающий оценивание азимутальной ошибки и не ухудшающий, что особенно важно, результаты проведенного «горизонтирования».
В представленном выше случае из «Инженерной физики» маневр не только не обеспечивает оценивание азимутальной ошибки, но даже ухудшает результаты «горизонтирования», проведенного на первом 5…10-минутном участке коррекции.
И, чтобы как-то сгладить последствия проведенного маневра, очевидно, и потребовался второй 5…10-минутный участок коррекции.
А теперь из общих физических представлений получим математическую модель, описывающую геометрию относительного размещения основных информационных систем на объекте, типа самолета или вертолета, и покажем, что указанная модель одновременно описывает и упоминавшиеся выше кинематические составляющие скорости.
Для раскрытия физической сути указанных составляющих скорости приведем вывод дифференциальных уравнений, описывающих характер изменения их относительных координат в проекциях на оси географического сопровождающего трехгранника ГСТ ONHE и опорного трехгранника гироплатформы ОТГП ИНС Оξηζ.
Для этого воспользуемся приведенной схемой относительного размещения на объекте ИНС1, ИНС2 и СНС (фиг. 1).
На указанной схеме начало связанной с объектом системы координат Oxyz совмещено с центром его тяжести ЦТ, а местоположение ИНС1, ИНС2 и антенного блока СНС определяется соответственно векторами  ,
,  и
и  . Это означает, что при векторе угловой скорости
. Это означает, что при векторе угловой скорости  вращения объекта вокруг его ЦТ будут иметь место линейные перемещения ИНС1, ИНС2 и СНС со скоростями вида:
вращения объекта вокруг его ЦТ будут иметь место линейные перемещения ИНС1, ИНС2 и СНС со скоростями вида:

где  - вектор предписанной заданием путевой скорости объекта.
- вектор предписанной заданием путевой скорости объекта.
В соответствии с представленными на фиг. 1 векторными треугольниками О-ИНС1-СНС и O-ИНС2-СНС, запишем следующие полезные матричные равенства:

где  ,
,  - вектора местоположения ИНС1 и ИHC2 соответственно относительно антенного блока (АБ) СНС.
- вектора местоположения ИНС1 и ИHC2 соответственно относительно антенного блока (АБ) СНС.
Очевидно, что сравнение скоростей  ,
,  перемещения ИНС1 и ИНС2 со скоростью
перемещения ИНС1 и ИНС2 со скоростью  АБ СНС приведет к выражениям вида:
АБ СНС приведет к выражениям вида:



Из приведенных выражений следует, что скорости  и
и  движения ИНС1 и ИНС2 относительно АБ СНС однозначно определяются угловой скоростью вращения Ω' объекта вокруг его ЦТ и местоположением ИНС1 и ИНС2 относительно АБ СНС Δr1, Δr2 (2).
движения ИНС1 и ИНС2 относительно АБ СНС однозначно определяются угловой скоростью вращения Ω' объекта вокруг его ЦТ и местоположением ИНС1 и ИНС2 относительно АБ СНС Δr1, Δr2 (2).
Выше  представлена, как угловая скорость вращения объекта вокруг ЦТ. Но этого абсолютно недостаточно для полной характеристики рассматриваемой скорости, поскольку, не ясно, относительно какой системы координат следует рассматривать вращение объекта, а посему непонятна процедура ее расчета.
представлена, как угловая скорость вращения объекта вокруг ЦТ. Но этого абсолютно недостаточно для полной характеристики рассматриваемой скорости, поскольку, не ясно, относительно какой системы координат следует рассматривать вращение объекта, а посему непонятна процедура ее расчета.
Для ответа на эти вопросы введем в рассмотрение абсолютную угловую скорость  вращения объекта и абсолютную угловую скорость
вращения объекта и абсолютную угловую скорость  вращения географического сопровождающего трехгранника ГСТ ONHE.
вращения географического сопровождающего трехгранника ГСТ ONHE.
Понятие абсолютной угловой скорости вращения означает вращение чего-то относительно инерциальной системы координат. В рассматриваемом случае и - это угловые скорости вращения объекта и ГСТ ONHE относительно инерциальной системы отсчета.
Очевидно, что угловая скорость вращения объекта относительно ГСТ ONHE будет равна разности угловых скоростей и :

Учитывая, что векторы  ,
,  ,
,  , жестко связанные с объектом, изменяют свои проекции на оси ГСТ ONHE, исключительно только за счет вращения связанной с объектом системы координат oxyz, относительно ГСТ ONHE, угловая скорость которого определяется выражением (4), то, очевидно, справедливы следующие выражения для их производных:
, жестко связанные с объектом, изменяют свои проекции на оси ГСТ ONHE, исключительно только за счет вращения связанной с объектом системы координат oxyz, относительно ГСТ ONHE, угловая скорость которого определяется выражением (4), то, очевидно, справедливы следующие выражения для их производных:

Сравнивая 1-ую и 2-ую производные с 3-ей (5), получим выражения:

которые, с учетом (2), можно записать в следующем виде:

Сравнивая полученные векторные выражения (7) с полученными ранее (3), и объединяя их можно записать следующие обобщенные выражения вида:

Если представить полученные выражения в скалярном виде, в проекциях на оси географического сопровождающего трехгранника ГСТ ONHE, то они приобретут вид, вполне приемлемый для их алгоритмического использования.
Приведем его:


где  ,
,  ,
,  и
и  ,
,  ,
,  - проекции векторов
- проекции векторов  и
и  (2) на оси ГСТ ONHE.
(2) на оси ГСТ ONHE.
Полученные выражения имеют вид дифференциальных уравнений первого порядка, представленные в нормальной форме Коши, что, кстати, и необходимо для описания исходной системы - модели сообщения в традиционной процедуре оптимального оценивания. Это, если смотреть слева.
С другой стороны, если на (9) и (10) смотреть справа, то это выражения для расчета составляющих скорости перемещения ИНС1 (9) и ИНС2 (10) относительно АБСНС.
В некоторых случаях, вместо уравнений/выражений (9), (10), представленных в проекциях на оси ГСТ ONHE, целесообразно использовать аналогичные уравнения/выражения, но в проекциях на оси опорного трехгранника гироплатформы ОТГП ИНС Oξηζ.
Очевидно, что указанные уравнения/выражения, по аналогии с (9), (10) будут иметь следующий вид:


где Δξ1, Δη1, Δζ1 и Δξ2, Δη2, Δζ2 - текущие значения координат местоположения ИНС1/БИНС1 и ИНС2/БИНС2 относительно АБ СНС в проекциях на оси ОТГП ИНС Оξηζ, a ΔV1ξ, ΔVlη, ΔV1ζ и ΔV2ξ, ΔV2η, ΔV2ζ - кинематические составляющие скорости движения ИНС1/БИНС1 и ИНС2/БИНС2 в проекциях на оси ОТГП ИНС Oξηζ.
В процедуре оптимальной фильтрации и идентификации ошибок ИНС по измерениям СНС приведенные выше дифференциальные уравнения (11), (12) используются, как составная часть традиционных моделей ошибок ИНС или БИНС, разработанных на основе строгого математического описания их функционирования и в полном соответствии с основополагающим принципом невозмущенного измерения ускорений.
Полученная таким образом расширенная модель ошибок ИНС описывает не только традиционные для ИНС параметры и их связи, но и те кинематические составляющие сигналов измерения, которые ранее не учитывались.
Расширение модели ошибок ИНС позволяет устранить основную причину алгоритмической несостоятельности всех известных алгоритмов коррекции, заключающуюся в некорректном математическом описании исходной системы, и обеспечить тем самым быструю и устойчивую сходимость всех и, в первую очередь, слабонаблюдаемых параметров состояния, таких, как αz, εy, Δni(Δξi), Δni(Δζi), Δei(Δηi).
Для алгоритмического использования полученных выше дифференциальных уравнений (11), (12) необходимо знать текущие значения входных для указанных уравнений параметров, а именно, составляющих  ,
,  ,
,  относительной угловой скорости вращения объекта. Приведем возможные математические процедуры расчета рассматриваемых угловых скоростей.
относительной угловой скорости вращения объекта. Приведем возможные математические процедуры расчета рассматриваемых угловых скоростей.
Очевидно, что угловые скорости вращения ССК Oxyz относительно ГСТ ONHE определяются угловыми скоростями  ,
,  ,
,  изменения углов эволюции объекта. При этом угловые скорости
изменения углов эволюции объекта. При этом угловые скорости  ,
,  ,
,  и
и  ,
,  ,
,  вращения объекта относительно ГСТ ONHE и ОТГП Oξηζ могут быть определены путем приведения компонент , , , и
вращения объекта относительно ГСТ ONHE и ОТГП Oξηζ могут быть определены путем приведения компонент , , , и  , , к осям ГСТ и ОТГП соответственно. Очевидно, они будут равны (см. фиг. 2, 3):
, , к осям ГСТ и ОТГП соответственно. Очевидно, они будут равны (см. фиг. 2, 3):


В выражениях (13), (14) и далее под «s» следует понимать синус угла, а под «с» - косинус.
Приведенные выражения могут быть использованы для расчета искомых составляющих угловой скорости.
При этом производные , , , целесообразно определять методом численного дифференцирования с дискретом 0,1 сек.
Выражения (13), (14) могут быть использованы по их назначению как по измерениям ИНС, так и по измерениям БИНС.
На практике может быть использован и другой подход расчета рассматриваемых составляющих угловой скорости объекта, но он может быть реализован исключительно только по измерениям БИНС. Он представляется несколько более сложным, но его достоинством является отсутствие необходимости выполнения операций численного дифференцирования, что немаловажно.
Указанный вариант расчета рассматриваемых составляющих угловой скорости объекта основан на определении относительной угловой скорости и предполагает знание, как абсолютной угловой скорости вращения объекта, так и абсолютных угловых скоростей вращения ГСТ и ОТГП. При этом искомые угловые скорости находятся, как разности абсолютной угловой скорости объекта и соответственно двух вторых. По причине того, что абсолютная угловая скорость объекта измеряется исключительно только системами, типа БИНС, указанный подход может быть использован только при их коррекции.
Учитывая, что составляющие абсолютной угловой скорости объекта, измеряемые БИНС, выдаются в проекциях на оси связанной системы координат, необходимо их предварительное преобразование по осям ГСТ ONHE и ОТГП Оξηζ.
Для этого запишем прямые и обратные матричные преобразования для систем координат, приведенных на фиг. 2 и фиг. 3:
В соответствии с фиг. 2 и фиг. 3, приведем транспонированные матрицы  и
и  для реализации указанных процедур. Они, очевидно, имеют следующий вид:
для реализации указанных процедур. Они, очевидно, имеют следующий вид:


В соответствии с матрицей (16) выражения для составляющих абсолютной угловой скорости объекта в проекциях на оси ГСТ ONHE будут иметь следующий вид:

Аналогичные выражения в проекциях на оси ОТГП Oξηζ будут равны:

Для определения составляющих абсолютной угловой скорости ГСТ ONHE и ОТГП Оξηζ, воспользуемся взаимной ориентацией ГСК OX'Y'Z', ГСТ ONHE и ОТГП Оξηζ, приведенной на фиг. 4.
Для нахождения абсолютной угловой скорости вращения ГСТ ONHE запишем сначала выражения для его угловой скорости относительно ГСК OX'Y'Z', связанной с Землей, в проекциях на оси ГСТ ONHE. В соответствии с фиг. 4, они, очевидно, будут равны:

где приняты следующие очевидные обозначения:

где  ,
,  - северная и восточная составляющие путевой скорости объекта,
- северная и восточная составляющие путевой скорости объекта,
RN,RE - главные радиусы кривизны земного эллипсоида вращения.
Очевидно, что искомые абсолютные составляющие угловой скорости вращения ГСТ будут равны сумме составляющих (19) и соответствующих проекций, обусловленных суточным вращением Земли, а именно:
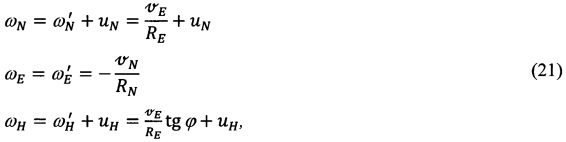
где составляющие uN и uH равны

a u - скорость суточного вращения Земли.
Следовательно, искомые составляющие угловой скорости объекта относительно ГСТ ONHE будут равны:

где ΩN, ΩН, ΩE определяются выражениями (17), а ωN, ωH, ωЕ выражениями (21).
Для определения составляющих относительной угловой скорости ОТГП Оξηζ, в соответствии с фиг. 3, приведем все три угловые скорости  ,
,  ,
,  произведенных поворотов на углы λ, ϕ, χ к осям ОТГП Oξηζ. В результате получим:
произведенных поворотов на углы λ, ϕ, χ к осям ОТГП Oξηζ. В результате получим:

Выражения для  и
и  представлены выше (20).
представлены выше (20).
Очевидно, что выражения для составляющих абсолютной угловой скорости ОТГП будут равны сумме составляющих (24) и соответствующих составляющих угловой скорости суточного вращения Земли:

где uN,uH определяются выражениями (23).
Выражения для искомых составляющих угловой скорости вращения объекта относительно ОТГП Оξηζ будут равны:

где Ωξ, Ωn, Ωζ определяются выражениями (18), a ωξ, ωη, ωζ - выражениями (25).
Таким образом показано, что корректное описание исходной системы достигается расширением традиционной модели ошибок ИНС путем включения в нее нетрадиционных для нее дифференциальных уравнений, описывающих характер изменения координат ее установки на объекте относительно той информационной системы, которая выполняет функции измерителя, или корректора ИНС. В качестве последней рассматривается СНС.
Необходимость указанного расширения обусловлена тем, что только в этом случае достаточно просто и эффективно может быть обеспечен алгоритмический учет и устранение всех нежелательных последствий, к которым приводят кинематические составляющие скорости, имеющие место при маневре объекта и обусловленные геометрией относительного размещения задействованных в рассматриваемых режимах информационных систем.
Далее рассмотрим важнейшие для разрабатываемого алгоритма операции, которые определяют физическую суть предлагаемого инженерного решения.
При разработке (выводе) модели ошибок ИНС важное значение имеет форма представления ее выходных сигналов по скорости. Указанная форма не только определяет вид матрицы наблюдения, но от нее существенным образом зависит и сама модель ошибок ИНС.
Не приводя и не анализируя всевозможные формы указанного представления, следует отметить, что наиболее аналитически проработанным и приемлемым для решения рассматриваемой задачи является представление вида:
 ,
,
где: Vξ, Vη, Vζ - составляющие абсолютной линейной скорости ИНС в проекциях на оси ОТГП Оξηζ, αх, αy, αz - углы рассогласования реального и опорного трехгранников ГП; ΔVx, ΔVy - погрешности измерения/расчета горизонтальных составляющих абсолютной скорости, входящие, наряду с малыми углами αх, αy, αz рассогласования, в перечень параметров состояния ИНС.
Составляющие (27) по своей физической сути являются чисто инерциальными и в явном виде не включают в себя компоненты скорости кинематического характера. Хотя в неявном виде они присутствуют, как в составляющих (27), так и в составляющих скорости, сформированных по измерениям СНС.
В явном виде указанные составляющие скорости будут представлены при сравнении горизонтальных составляющих абсолютной скорости (27) и аналогичных составляющих, сформированных по текущим измерениям СНС. Как будет показано ниже, в результате указанного сравнения будут получены так называемые уравнения связи, из которых достаточно просто могут быть сформированы искомые сигналы измерения и определены все элементы матрицы наблюдения для рассматриваемой процедуры оценивания и коррекции.
Прежде, чем переходить к рассмотрению указанных вопросов, следует отметить, что при этом будут использованы известные кинематические соотношения, связывающие погрешности Δϕ, Δλ, Δχ автономного инерциального счисления основных навигационных параметров с ошибками αх, αy выдерживания вертикали ИНС и углом αz азимутального ухода ее ГП и аналогичные соотношения для погрешностей Δυ, Δγ, Δψг измерения углов эволюции объекта.
Указанные соотношения имеют следующий вид:
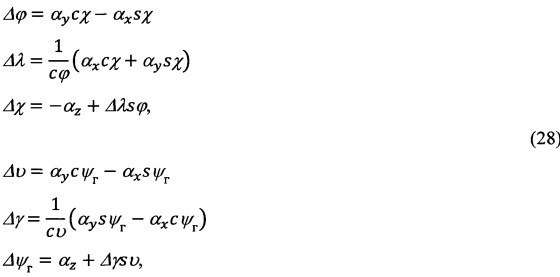
Следует отметить, что приведенные соотношения правомочны исключительно для режима автономного инерциального счисления и никоим образом не могут быть распространены на такие автономные режимы, как курсодоплеровский КДР, или курсовоздушный КВР режимы счисления.
Выходные сигналы ИНС для горизонтальных составляющих абсолютной линейной скорости в проекциях на оси опорного трехгранника ГП Оξηζ представлены выражениями (27).
Сформируем аналогичные выражения по измерениям СНС с использованием счисленного ИНС текущего значения угла χ азимутальной ориентации ГП ИНС.
Здесь и далее будем использовать следующие обозначения для счисленных ИНС параметров  ,
,  ,
,  и их идеальных значений ϕ, λ, χ - Очевидно, что связывающие их соотношения имеют вид:
и их идеальных значений ϕ, λ, χ - Очевидно, что связывающие их соотношения имеют вид:

Следует заметить, что для входящих в (29) ошибок счисления Δϕ, Δλ, Δχ правомочны приведенные выше соотношения (28).
Будем также полагать, что все навигационные параметры, сформированные по измерениям СНС, равны их идеальным значениям, аддитивно замешанным на нормальных некоррелированных шумах соответствующей интенсивности.
Очевидно, что зная текущие значения географической широты ϕс с СНС, а также горизонтальные составляющие  ,
,  путевой скорости достаточно просто могут быть сформированы соответствующие составляющие абсолютной линейной скорости
путевой скорости достаточно просто могут быть сформированы соответствующие составляющие абсолютной линейной скорости  ,
,  :
:

где: u - угловая скорость суточного вращения Земли; RE - один из главных радиусов земного эллипсоида вращения.
Проектируя составляющие (30) на оси опорного трехгранника ГП ИНС, получим следующие выражения для расчета составляющих  ,
,  :
:

Достаточно просто можно показать, что подстановка в (31) значения  приводит к следующим выражениям для составляющих , :
приводит к следующим выражениям для составляющих , :

где для составляющих  ,
,  абсолютной линейной скорости приняты следующие обозначения:
абсолютной линейной скорости приняты следующие обозначения:
 ,
,
Очевидно, что, с точностью до случайных шумов измерения, составляющие , (31) равны соответствующим составляющим Vξ Vη выражений (27).
Подставляя в (32) вместо Δχ его значение, определяемое соотношением (28), получим следующее выражение для , :

Вычитая из составляющих скорости (27) соответствующие составляющие (33) и помня об отмеченной выше близости компонент , , и Vξ, Vη получим следующие уравнения связи:
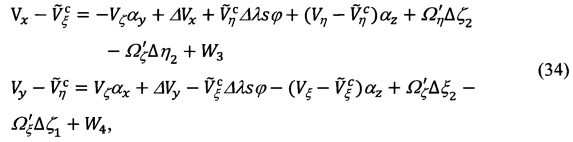
где: W3, W4 - упомянутые выше шумы измерения;  - составляющие ΔVξ, ΔVη кинематической скорости (12).
- составляющие ΔVξ, ΔVη кинематической скорости (12).
Обозначим левые части уравнений (34) через Z3 и Z4:

где Z3, Z4 - традиционно принятые в процедуре оптимальной фильтрации обозначения для сигналов измерения, которые находятся путем сравнения составляющих скорости Vx, Vy, измеряемых ИНС (27), и составляющих  ,
,  , сформированным по измерениям СНС (33).
, сформированным по измерениям СНС (33).
По правой части уравнений связи (34), которые в матричном представлении, как правило, записываются в виде:

определяются элементы матриц-строк H3 и Н4 наблюдения.
Для их определения приведем вид вектора параметров состояния расширенной системы для случая коррекции по измерениям СНС.
В соответствии с проведенной проработкой рассматриваемый вектор x имеет размерность [13×1] и должен включать в себя следующие параметры состояния:

где все параметры состояния выше были уже представлены, за исключением нескомпенсированных составляющих εx, εy, εz ухода соответствующих гироскопов.
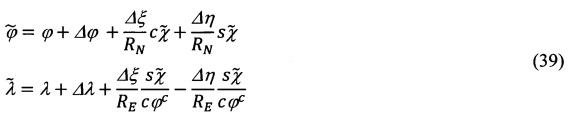
Сигналы измерения, сформированные по измерениям координат текущего местоположения объекта, могут быть получены сравнением географических координат, счисленных инерциальной системой и измеренных СНС.
Если вторые из них записать в виде:

то первые - инерциальные координаты, очевидно, будут равны:
где

суть координаты местоположения ИНС относительно АБ СНС. Точность их представления определяется величинами второго порядка малости относительно таких параметров состояния (37), как Δξ, Δη, Δλ, αz.
Сравнение координат местоположения, счисленных инерциальной системой (39) и измеренных СНС (38) приведет к следующим уравнениям связи:

где W1, W2 - нормальные шумы измерения известной интенсивности.
Принимая левые части уравнений (41) в качестве сигналов измерения Z1 и Z2:

по правым частям, в соответствии с (41), могут быть получены соответствующие элементы матрицы наблюдения.
Указанная матрица, в соответствии с (34), (41) и (37), будет иметь следующий вид:
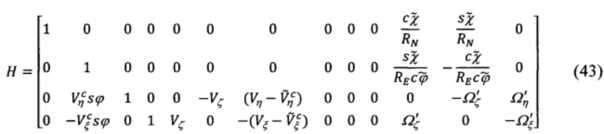
Учитывая, что процедура оптимальной коррекции всех параметров состояния ИНС в классическом варианте ее исполнения с оцениванием и управлением в соответствии с представленной в монографии А.А. Красовского «Аналитическое конструирование контуров управления летательными аппаратами», «Машиностроение», Москва, 1969 [3] теоремой разделения, для современных ИНС является невозможной, вследствие их закрытости и отсутствия доступа к основным управленческим точкам измерительных каналов рассматриваемых систем, поэтому не остается ничего более приемлемого, как ее программная реализация в разомкнутой схеме, или в БЦВМ комплекса.
Прежде, чем переходить к ее математическому описанию, представим предшествующую ей процедуру оптимального оценивания и циклограмму ее реализации.
Для оценивания всех ошибок ИНС, математическое описание которых представлено в виде расширенной системы взаимосвязанных дифференциальных уравнений первого порядка, необходимо предусмотреть два участка полета.
На первом горизонтальном участке прямолинейного полета без ускорений осуществляется так называемое «горизонтирование» гироплатформы с оцениванием хорошо наблюдаемых параметров горизонтальных каналов ИНС, таких как ΔVx, ΔVy, αх, αy, εх и согласованное (нераздельное) оценивание слабонаблюдаемых паараметров, типа αz, εy. Длительность этого участка коррекции составляет не более 4-4,5 минут, по окончании которого, с целью точного оценивания слабонаблюдаемых параметров, выполняется маневр, типа «змейки», координированного или боевого разворотов.
Длительность маневра, как правило, не превышает 30-40 сек.
В результате его выполнения осуществляется точное оценивание таких параметров состояния, как αz, εy, Δξ, Δη, Δζ, а также доуточнение оценки дрейфа εz азимутального гироскопа. Точное оценивание координат Δξ, Δη, Δζ местоположения ИНС относительно АБ СНС является показателем качества оценивания и необходимо для алгоритмического учета кинематических составляющих скорости.
По окончании маневра завершается активная фаза оптимального оценивания ошибок автономного инерциального счисления, основанная на рекуррентной процедуре обработки, фильтрации и идентификации постоянно обновляющейся входной последовательности сигналов, формируемых по измерениям ИНС и СНС.
После чего фильтр-идентификатор переводят в режим долгосрочного - до следующего сеанса коррекции, прогноза полученных оценок.
Особенностью его работы в режиме прогноза является обнуление входных сигналов фильтра и приостановка математической процедуры расчета оптимальных коэффициентов усиления, которые на все время прогноза также принимаются равными нулю.
При этом в качестве начальных значений оценок в процедуре прогноза используют их значения, полученные по завершении маневра, а все значения коэффициентов, взвешивающих рассматриваемые оценки, рассчитываются в соответствии с их аналитическим представлением в расширенной модели ошибок ИНС. При этом для их расчета используются текущие значения автономно счисленных / откорректированных параметров.
Далее полученные в результате прогноза значения оценок будем обозначать так же, как и оптимальные оценки, а именно,  ,
,  ,
,  ,
,  ,
,  …, а счисленные значения инерциальных параметров, как
…, а счисленные значения инерциальных параметров, как  ,
,  ,
,  , Vx, Vy ….
, Vx, Vy ….
Приведем процедуру коррекции основных навигационных параметров.
При коррекции географических координат местоположения и истинного курса будем считать, что счисленные значения , , определяются выражениями (29). Тогда, располагая значениями оценок  и
и  , выражения для расчета откорректированных географических координат местоположения будут иметь вид:
, выражения для расчета откорректированных географических координат местоположения будут иметь вид:

Для коррекции истинного курса воспользуемся выражением, в соответствии с которым осуществляется его расчет:

где  - счисленное значение угла азимутальной ориентации опорного трехгранника ГП ИНС, а
- счисленное значение угла азимутальной ориентации опорного трехгранника ГП ИНС, а  - измеренный гироскопический курс.
- измеренный гироскопический курс.
Из выражения (45) следует, что для того, чтобы откорректировать истинный курс необходимо, очевидно, предварительно списать ошибки счисления угла и ошибки измерения гироскопического курса .
Процедура коррекции счисленного значения угла осуществляется в соответствии с соотношениями:

где  ,
,  - оцененные/спрогнозированные значения оценок угла αz азимутального ухода ГП ИНС и ошибки счисления географической долготы, а
- оцененные/спрогнозированные значения оценок угла αz азимутального ухода ГП ИНС и ошибки счисления географической долготы, а  - откорректированное значение географической широты (44).
- откорректированное значение географической широты (44).
При этом коррекцию угла гироскопического курса осуществляют в соответствии со следующей цепочкой соотношений:
где  ,
,  ,
,  оцененные/спрогнозированные значения малых углов рассогласования реального и опорного трехгранников ГП ИНС.
оцененные/спрогнозированные значения малых углов рассогласования реального и опорного трехгранников ГП ИНС.
Следовательно, откорректированное значение истинного курса  , в соответствии с (45) будет равно:
, в соответствии с (45) будет равно:

Для коррекции составляющих Vx, Vy абсолютной линейной скорости воспользуемся выражениями (27).
Зная текущие спрогнозированные значения оценок  ,
,  ,
,  ,
,  ,
,  , в соответствии с упомянутыми выше выражениями (27), достаточно просто могут быть рассчитаны текущие откорректированные значения составляющих
, в соответствии с упомянутыми выше выражениями (27), достаточно просто могут быть рассчитаны текущие откорректированные значения составляющих  ,
,  абсолютной линейной скорости.
абсолютной линейной скорости.
Выражения для их расчета имеют вид:

Указанные значения горизонтальных составляющих  ,
,  абсолютной линейной скорости могут быть использованы в качестве входных параметров при реализации алгоритма автономного инерциального счисления. При этом в качестве начальных значений координат ϕ, λ, χ используются их откорректированные значения (44), (46).
абсолютной линейной скорости могут быть использованы в качестве входных параметров при реализации алгоритма автономного инерциального счисления. При этом в качестве начальных значений координат ϕ, λ, χ используются их откорректированные значения (44), (46).
Дополнительно, с целью реализации эффективной процедуры контроля качества оценивания параметров состояния ИНС, после завершения маневра и выходе на установившийся послеманевренный курс, что устанавливают по осредненному на 5-секундном временном интервале значению составляющей  (14), (26), вычисляемой в соответствии с рекуррентным выражением вида:
(14), (26), вычисляемой в соответствии с рекуррентным выражением вида:

где  - предыдущее и последующее значения осредненной скорости;
- предыдущее и последующее значения осредненной скорости;  - текущее входное значение осредняемой величины после выхода на установившийся послеманевренный курс - спустя 30 сек после начала маневра и при выполнении неравенства вида:
- текущее входное значение осредняемой величины после выхода на установившийся послеманевренный курс - спустя 30 сек после начала маневра и при выполнении неравенства вида:

При выполнении указанного неравенства формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок  ,
,  ,
,  координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат.
координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат.
Получаемые при этом текущие значения оценок  ,
,  ,
,  осредняют на 3-секундном интервале времени, в соответствии с приведенной выше рекуррентной процедурой нахождения среднего (50), и сравнивая полученные осредненные значения оценок
осредняют на 3-секундном интервале времени, в соответствии с приведенной выше рекуррентной процедурой нахождения среднего (50), и сравнивая полученные осредненные значения оценок  ,
,  ,
,  с хранящимися в БЦВМ конструктивными значениями указанных координат, при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка+», останавливают процедуру оценивания и переходят к режиму полноценного прогноза и коррекции.
с хранящимися в БЦВМ конструктивными значениями указанных координат, при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка+», останавливают процедуру оценивания и переходят к режиму полноценного прогноза и коррекции.
В противном случае формируют признак «Оценка-» и после остановки оценивания прогноз не реализуется, а коррекция текущих значений счисленных/измеренных параметров осуществляют с использованием запомненных на момент остановки оценивания значений оценок  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Целесообразность использования апосредованного контроля качества оптимального оценивания всех параметров состояния ИНС, включая и слабонаблюдаемые, такие, как угол αz азимутального ухода ГП ИНС и дрейф εy гироскопа продольного канала, по характеру оценивания координат местоположения ИНС относительно антенного блока АБ СНС может быть подтверждена теоретическими и экспериментальными исследованиями, а также результатами стендовых и натурных испытаний, при проведении которых получено основное из того, что в настоящем изобретении предлагается в качестве технического результата.
В ходе упомянутых работ дополнительно были проведены всесторонние исследования по оценке:
- влияния интенсивности выполняемого маневра на точность и быстродействие оценивания параметров ИНС;
- зависимости указанных показателей качества оценивания от точности опорной информации, частоты ее обновления и времени запаздывания.
Основной вывод проведенных исследований и натурных испытаний заключается в том, что без точного оценивания координат относительного размещения задействованных в комплексной обработке информации навигационных измерительных систем невозможно качественное решение таких задач, как начальная выставка и коррекция ИНС в специфических условиях возмущенного и маневренного полета ЛА.
Точное оценивание относительных координат местоположения задействованных в совместной обработке информации навигационных систем - это необходимое и достаточное условие точного оценивания всех параметров состояния ИНС, включая и слабонаблюдаемые.
Заявляемый способ оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы реализуется следующим образом.
1. Оптимальное оценивание ошибок инерциальной информации осуществляют на основе классической процедуры оптимальной фильтрации и идентификации Калмана и в точном соответствии с традиционной для рассматриваемого режима оценивания математической моделью ошибок ИНС.
2. Входные сигналы оптимального фильтра-идентификатора формируют посредством сравнения одноименных географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости объекта в проекциях на оси ОТГП ИНС, измеренных ИНС и сформированных по измерениям СНС, а сам фильтр-идентификатор синтезируют в полном соответствии с математическим описанием ИНС.
3. Оценивание ошибок инерциальной информации методически организуют таким образом, что после 270-ти секунд прямолинейного горизонтального полета, на котором реализуют точное «горизонтирование» с оцениванием хорошо наблюдаемых параметров горизонтальных каналов ИНС, осуществляют высокодинамичный маневр, типа «змейки», координированного или боевого разворотов, на котором оценивают слабонаблюдаемые параметры ИНС, типа азимутального ухода αz ее ГП и нескомпенсированного дрейфа εу гироскопа продольного канала.
4. По окончании маневра активную фазу оптимальной фильтрации параметров ИНС приостанавливают и фильтр-идентификатор переводят в режим долгосрочного - до следующего сеанса оптимального оценивания ошибок ИНС, прогноза полученных оценок.
5. Для его реализации сигналы измерения и оптимальные коэффициенты усиления фильтра-идентификатора обнуляют, предварительно останавливая процедуру их рекуррентного расчета, а значения оценок на момент завершения активной фазы оптимального оценивания используют в качестве начальных условий в процедуре их прогноза.
6. При этом прогноз оптимальных оценок осуществляют в соответствии с дискретными уравнениями, используемыми в процедуре оптимального оценивания для расчета априорных оценок.
7. Коррекцию выходных параметров ИНС - географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости реализуют в разомкнутом контуре, для чего используют текущие спрогнозированные значения оценок  ,
,  ,
,  ,
,  и счисленные значения навигационных параметров
и счисленные значения навигационных параметров  ,
,  ,
,  ,
,  .
.
Дополнительно для достижения заявленного технического результата осуществляют:
8. Традиционную, разработанную для решения подобных задач модель ошибок ИНС расширяют за счет включения в нее математического описания координат ее местоположения относительно антенного блока СНС, которое представляют в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси опорного трехгранника ГП ИНС, которые одновременно описывают и аддитивно входящие в сигналы измерения оптимального фильтра-идентификатора составляющие кинематической скорости ИНС.
Обоснование необходимости расширения модели ошибок ИНС и вывод дифференциальных уравнений ее движения относительно АБ СНС приведен в разделе осуществления изобретения и представлен выражениями (1)÷(12), где сами уравнения, и одновременно, выражения для составляющих кинематической скорости движения ИНС относительно АБ СНС, имеют вид (11), (12).
При этом вывод расчетных выражений для составляющих  ,
,  ,
,  относительной угловой скорости объекта, которые являются входными параметрами дифференциальных уравнений (11), (12), представлен выражениями (13)÷(26).
относительной угловой скорости объекта, которые являются входными параметрами дифференциальных уравнений (11), (12), представлен выражениями (13)÷(26).
9. При формировании входных сигналов оптимального фильтра-идентификатора и матрицы наблюдения используют кинематические соотношения (28), связывающие ошибки Δϕ, Δλ, Δχ, счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС с погрешностями выдерживания вертикали αх, αy и углом αz азимутального ухода ГП ИНС, чем, с точностью до величин второго порядка малости относительно таких параметров, как Δϕ, Δλ, αх, αy, αz, обеспечивают определение значений элементов матриц сообщения и наблюдения, чем обеспечивают эффективное по точности и быстродействию оценивание и последующий долгосрочный прогноз таких ошибок автономного инерциального счисления, как  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Подробное описание процедуры формирования позиционных (41) и скоростных (34) уравнений связи и получения на их основе выражений для расчета сигналов измерения по координатам (42) и скорости (35) и матрицы наблюдения (43), представлено в соответствующем подразделе осуществления изобретения, в котором представлен вывод упомянутых сигналов и матрицы наблюдения (28)÷(43).
10. Коррекцию счисленных инерциальной системой географических координат местоположения  ,
,  , осуществляют в соответствии с общепринятыми выражениями (44), в которых используют текущие спрогнозированные значения оценок
, осуществляют в соответствии с общепринятыми выражениями (44), в которых используют текущие спрогнозированные значения оценок  ,
,  , а коррекцию горизонтальных составляющих Vx, Vy абсолютной линейной скорости реализуют в соответствии с выражениями (49). Для чего используют текущие значения спрогнозированных оценок
, а коррекцию горизонтальных составляющих Vx, Vy абсолютной линейной скорости реализуют в соответствии с выражениями (49). Для чего используют текущие значения спрогнозированных оценок  ,
,  ,
,  ,
,  ,
,  и расчетные значения составляющих Vx и Vy (27).
и расчетные значения составляющих Vx и Vy (27).
11. Коррекцию истинного курса объекта реализуют в соответствии с физическим определением углов ψг и χ, его определяющих (45), (48).
Для этого рассчитывают откорректированное значение угла  азимутальной ориентации опорного трехгранника ГП ИНС (46), используя текущие спрогнозированные значения оценок
азимутальной ориентации опорного трехгранника ГП ИНС (46), используя текущие спрогнозированные значения оценок  ,
,  и откорректированное значение широты
и откорректированное значение широты  (44).
(44).
При этом для расчета оценки  погрешности счисления угла
погрешности счисления угла  используют соответствующее кинематическое соотношение связи Δχ с αz и Δλ (28).
используют соответствующее кинематическое соотношение связи Δχ с αz и Δλ (28).
Текущее откорректированное значение гироскопического курса  рассчитывают в соответствии с цепочкой соотношений, представленной выражениями (47). Для этого используют текущие спрогнозированные значения оценок
рассчитывают в соответствии с цепочкой соотношений, представленной выражениями (47). Для этого используют текущие спрогнозированные значения оценок  ,
,  ,
,  и измеренные/откорректированные значения текущих углов тангажа
и измеренные/откорректированные значения текущих углов тангажа  , крена
, крена  и гироскопического курса
и гироскопического курса  . При этом сама процедура расчета (47) основана на кинематических соотношениях связи ошибок Δυ, Δγ, Δψг измерения углов эволюции объекта с малыми углами αх, αy, αz рассогласования реального и опорного трехгранников ГП ИНС (28).
. При этом сама процедура расчета (47) основана на кинематических соотношениях связи ошибок Δυ, Δγ, Δψг измерения углов эволюции объекта с малыми углами αх, αy, αz рассогласования реального и опорного трехгранников ГП ИНС (28).
Откорректированное значение истинного курса  рассчитывают, как сумму откорректированных значений
рассчитывают, как сумму откорректированных значений  (46) и
(46) и  (47).
(47).
Дополнительно для контроля качества оценивания и реализации полезной схемы принятия решения осуществляют:
12. После завершения маневра и выходе на установившийся послеманевренный курс, факт чего устанавливают по осредненному на 5-секундном временном интервале значению составляющей  относительной угловой скорости объекта (5), которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-ой секунды после начала коррекции.
относительной угловой скорости объекта (5), которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-ой секунды после начала коррекции.
При этом, если указанное среднее значение на выходе из маневра - начиная с 300-ой секунды не превышает  рад/с (~3 град/мин) (51), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок
рад/с (~3 град/мин) (51), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок  ,
,  ,
,  координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом значения оценок
координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом значения оценок  ,
,  ,
,  , в соответствии с рекуррентной процедурой нахождения среднего (50), осредняют на 3-секундном интервале времени, после чего осредненные значения оценок
, в соответствии с рекуррентной процедурой нахождения среднего (50), осредняют на 3-секундном интервале времени, после чего осредненные значения оценок  ,
,  ,
,  сравнивают с хранящимися в БЦВМ конструктивными значениями указанных координат и при его положительном исходе, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму прогноза и коррекции, в противном случае формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных, на момент остановки оценивания, значений оценок
сравнивают с хранящимися в БЦВМ конструктивными значениями указанных координат и при его положительном исходе, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму прогноза и коррекции, в противном случае формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных, на момент остановки оценивания, значений оценок  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
, .
.
Обоснование возможности и целесообразности реализации указанной схемы контроля оценивания приведено в заключительной части раздела осуществления изобретения.
Из представленного описания заявляемого способа оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы следует, что технический результат изобретения достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| СПОСОБ ОПТИМАЛЬНОГО ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И ЕЁ КОРРЕКЦИИ ПО НЕПОДВИЖНОМУ НАЗЕМНОМУ ОРИЕНТИРУ С ИЗВЕСТНЫМИ ГЕОГРАФИЧЕСКИМИ КООРДИНАТАМИ | 2019 |
|
RU2713582C1 |
| ЗАЩИЩЕННЫЙ СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2019 |
|
RU2713584C1 |
| СПОСОБ ФОРМИРОВАНИЯ БАРОИНЕРЦИАЛЬНОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2713583C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ МОДИФИЦИРОВАННОЙ, ИНВАРИАНТНОЙ К РЕЛЬЕФУ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ УГЛОМЕСТНОЙ ПРОЦЕДУРЫ РАСЧЁТА ДАЛЬНОСТИ | 2016 |
|
RU2617373C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ СУБОПТИМАЛЬНОЙ ПРОЦЕДУРЫ УГЛОВОГО СОПРОВОЖДЕНИЯ | 2016 |
|
RU2621374C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПРИЦЕЛИВАНИЯ ПО ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2016 |
|
RU2629130C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2590935C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
Изобретение относится к области комплексных навигационных систем, систем управления и наведения летательных аппаратов (ЛА). Технический результат изобретения - повышение точности и быстродействия оптимального оценивания и коррекции всех измеряемых инерциальной навигационной системой (ИНС) навигационных и пилотажных параметров в обеспечение эффективного решения навигационных, боевых и специальных задач. Способ оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы заключается в том, что используют традиционную процедуру оптимальной фильтрации и идентификации Калмана, для чего сигналы измерения оптимального фильтра-идентификатора формируют посредством сравнения одноименных географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости в проекциях на оси опорного трехгранника гироплатформы (ГП) ИНС, сформированных по измерениям спутниковой навигационной системы (СНС), а его структуру синтезируют в соответствии с традиционной для ИНС моделью ошибок, при этом характер полета методически организуют таким образом, что после 270 секунд прямолинейного горизонтального полета, на котором реализуют точное «горизонтирование» гироплатформы и оценивают хорошо наблюдаемые параметры горизонтальных каналов ИНС, осуществляют маневр, типа «змейки», координированного или боевого разворотов, после чего активную фазу процедуры оптимальной фильтрации и идентификации приостанавливают и фильтр-идентификатор переводят в режим долгосрочного - до следующего сеанса коррекции, прогноза, для реализации которого сигналы измерения обнуляют, а значения оценок на момент завершения активной фазы процедуры оценивания используют в качестве начальных условий в процедуре прогноза, при этом сам прогноз осуществляют в соответствии с дискретными уравнениями расчета априорных оценок ошибок ИНС, а коррекцию выходных параметров ИНС - географических координат местоположения и составляющих абсолютной линейной скорости, реализуют в разомкнутой схеме ИНС, для чего используют текущие прогнозируемые значения оценок параметров состояния ИНС. При этом модель ошибок ИНС расширяют за счет включения в нее математического описания координат ее местоположения относительно антенного блока (АБ) СНС и представляют их в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси опорного трехгранника ГП ИНС, которые одновременно описывают аддитивно входящие в скоростные сигналы измерения кинематические составляющие относительной скорости движения ИНС, а при формировании сигналов измерения и матрицы наблюдения используют кинематические соотношения, связывающие ошибки Δϕ, Δλ, Δχ счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС с погрешностями выдерживания вертикали αx, αy и углом αz азимутального ухода ГП ИНС с точностью до величин второго порядка малости относительно таких параметров, как Δϕ, Δλ, αх, αy, αz, обеспечивают определение текущих значений элементов матриц сообщения и наблюдения. 1 з.п. ф-лы, 4 ил.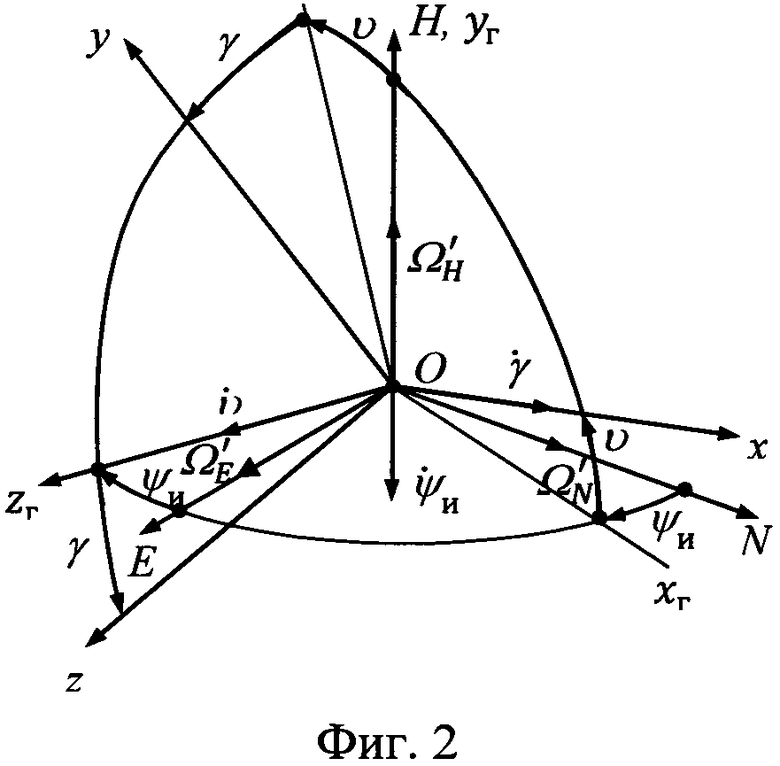
1. Способ оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы, включающий использование традиционной процедуры оптимальной фильтрации и идентификации Калмана, для чего сигналы измерения оптимального фильтра-идентификатора формируют посредством сравнения одноименных географических координат местоположения и горизонтальных составляющих абсолютной линейной скорости в проекциях на оси опорного трехгранника гироплатформы (ГП) инерциальной навигационной системы (ИНС) счисленных ИНС и сформированных по измерениям спутниковой навигационной системы (СНС), а его структуру синтезируют в соответствии с традиционной для ИНС моделью ошибок, при этом характер полета методически организуют таким образом, что после 270 секунд прямолинейного горизонтального полета, на котором реализуют точное «горизонтирование» гироплатформы и оценивают хорошо наблюдаемые параметры горизонтальных каналов ИНС, осуществляют маневр, типа «змейки», координированного или боевого разворотов, после чего активную фазу процедуры оптимальной фильтрации и идентификации приостанавливают и фильтр-идентификатор переводят в режим долгосрочного - до следующего сеанса коррекции, прогноза, для реализации которого сигналы измерения обнуляют, а значения оценок на момент завершения активной фазы процедуры оценивания используют в качестве начальных условий в процедуре прогноза, при этом сам прогноз осуществляют в соответствии с дискретными уравнениями расчета априорных оценок ошибок ИНС, а коррекцию выходных параметров ИНС - географических координат местоположения и составляющих абсолютной линейной скорости, реализуют в разомкнутой схеме ИНС, для чего используют текущие прогнозируемые значения оценок параметров состояния ИНС, отличающийся тем, что используемую при решении подобных задач модель ошибок ИНС расширяют за счет включения в нее математического описания координат ее местоположения относительно антенного блока (АБ) СНС и представляют их в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси опорного трехгранника ГП ИНС, которые одновременно описывают аддитивно входящие в скоростные сигналы измерения кинематические составляющие относительной скорости движения ИНС, а при формировании сигналов измерения и матрицы наблюдения используют кинематические соотношения, связывающие ошибки Δϕ, Δλ, Δχ счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС с погрешностями выдерживания вертикали αx, αy и углом αz азимутального ухода ГП ИНС, чем, с точностью до величин второго порядка малости относительно таких параметров, как Δϕ, Δλ, αх, αy, αz, обеспечивают определение текущих значений элементов матриц сообщения и наблюдения и реализуют тем самым точное и эффективное оценивание и последующий прогноз таких ошибок автономного инерциального счисления, как  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , при этом коррекцию автономно счисленных географических координат
, при этом коррекцию автономно счисленных географических координат  ,
,  текущего местоположения и составляющих Vx, Vy абсолютной линейной скорости осуществляют в соответствии с общепринятыми выражениями, для чего используют текущие спрогнозированные значения оценок , , , и малых углов , , , а для коррекции истинного курса рассчитывают откорректированное значение угла
текущего местоположения и составляющих Vx, Vy абсолютной линейной скорости осуществляют в соответствии с общепринятыми выражениями, для чего используют текущие спрогнозированные значения оценок , , , и малых углов , , , а для коррекции истинного курса рассчитывают откорректированное значение угла  азимутальной ориентации опорного трехгранника ГП в функции оцененных значений и и вычисляют откорректированное значение гироскопического курса
азимутальной ориентации опорного трехгранника ГП в функции оцененных значений и и вычисляют откорректированное значение гироскопического курса  в функции оценок
в функции оценок  и погрешности
и погрешности  измерения угла крена
измерения угла крена  , которую определяют расчетным путем в функции текущих, спрогнозированных значений оценок , и измеренных/откорректированных углов гироскопического курса ψг и тангажа υ, после чего рассчитывают истинный курс ψи как сумму оценок и .
, которую определяют расчетным путем в функции текущих, спрогнозированных значений оценок , и измеренных/откорректированных углов гироскопического курса ψг и тангажа υ, после чего рассчитывают истинный курс ψи как сумму оценок и .
2. Способ оценивания ошибок инерциальной информации и ее коррекции по измерениям спутниковой навигационной системы по п. 1, отличающийся тем, что после завершения маневра и выхода на установившийся послеманевренный курс, факт чего устанавливают по осредненному на 5-секундном временном интервале значению составляющей  относительной угловой скорости объекта, которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-й секунды после начала коррекции, при этом, если указанное среднее значение на выходе из маневра, начиная с 300-й секунды, не превышает
относительной угловой скорости объекта, которое постоянно вычисляют с момента начала маневра, отсчет которого, в соответствии с циклограммой коррекции, начинают с 270-й секунды после начала коррекции, при этом, если указанное среднее значение на выходе из маневра, начиная с 300-й секунды, не превышает  рад/с (~3 град/мин), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок
рад/с (~3 град/мин), формируют команду «Маневр завершен» и, не прекращая процедуры оптимального оценивания, приводят текущие значения оценок  ,
,  ,
,  координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом текущие значения оценок
координат местоположения ИНС относительно АБ СНС к осям связанной с объектом системы координат, а получаемые при этом текущие значения оценок  ,
,  ,
,  , в соответствии с рекуррентной процедурой нахождения среднего, осредняют на 3-секундном интервале времени, после чего осредненные значения оценок
, в соответствии с рекуррентной процедурой нахождения среднего, осредняют на 3-секундном интервале времени, после чего осредненные значения оценок  ,
,  ,
,  сравнивают с хранящимися в бортовой цифровой вычислительной машине (БЦВМ) конструктивными значениями указанных координат и при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму полноценного прогноза и коррекции, в противном случае формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных на момент остановки оценивания значений оценок , , , , , , ,
сравнивают с хранящимися в бортовой цифровой вычислительной машине (БЦВМ) конструктивными значениями указанных координат и при положительном исходе сравнения, когда их разница не превышает 1-2%, формируют признак «Оценка +», останавливают процедуру оптимального оценивания и переходят к режиму полноценного прогноза и коррекции, в противном случае формируют признак «Оценка -» и после остановки оценивания прогноз не реализуют, а коррекцию текущих значений счисленных параметров осуществляют с использованием запомненных на момент остановки оценивания значений оценок , , , , , , ,  ,
,  ,
,  .
.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ИЗМЕРЕНИЯ СКОРОСТИ ЛА ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ И БОРТОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2411538C2 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 1999 |
|
RU2156959C1 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ ГИРОСКОПИЧЕСКИХ НАВИГАЦИОННЫХ СИСТЕМ МОРСКИХ ОБЪЕКТОВ | 2008 |
|
RU2428659C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ЭТАПЕ НАЧАЛЬНОЙ ВЫСТАВКИ | 2005 |
|
RU2300081C1 |

