Область техники, к которой относится изобретение
Изобретение инерционный вибратор относится к устройствам для получения механических колебаний и может быть использовано для интенсификации различных технологических процессов.
Уровень техники
Движение груза в данном изобретении похоже на движение дебалансного груза, описанного в изобретении «Инерционный центробежный двигатель» [В.Д.Корнилов, В.В.Корнилов, патент РФ №2034170 от 20.01.1993 г. на изобретение «Инерционный центробежный двигатель», RU 2034170 по заявке №93003420/06]. Однако изобретением «Инерционный центробежный двигатель» достигается технический результат, отличный от изобретения «Инерционный вибратор», описанного в данном документе, т.е. получение не вибраций, а движения системы.
Также существует изобретение «Вибратор» [Р.В.Белавина, С.О.Острова, Е.П.Тихонов, патент РФ №2267349 от 21.05.2004 г. на изобретение «Вибратор», RU 2267349 по заявке №2004115457/12]. В изобретении «Вибратор» вибрации происходят в одной плоскости, в отличие от изобретения «Инерционный вибратор», описанного в данном документе, где вибрации происходят сразу в двух взаимно перпендикулярных плоскостях. Также в изобретении «Вибратор» вибрации достигаются путем движения эксцентрика, что утяжеляет всю конструкцию при необходимости достижения необходимой силы инерции, в отличие от изобретения «Инерционный вибратор», описанного в данном документе, где используется дебалансный груз на рычаге.
Раскрытие изобретения
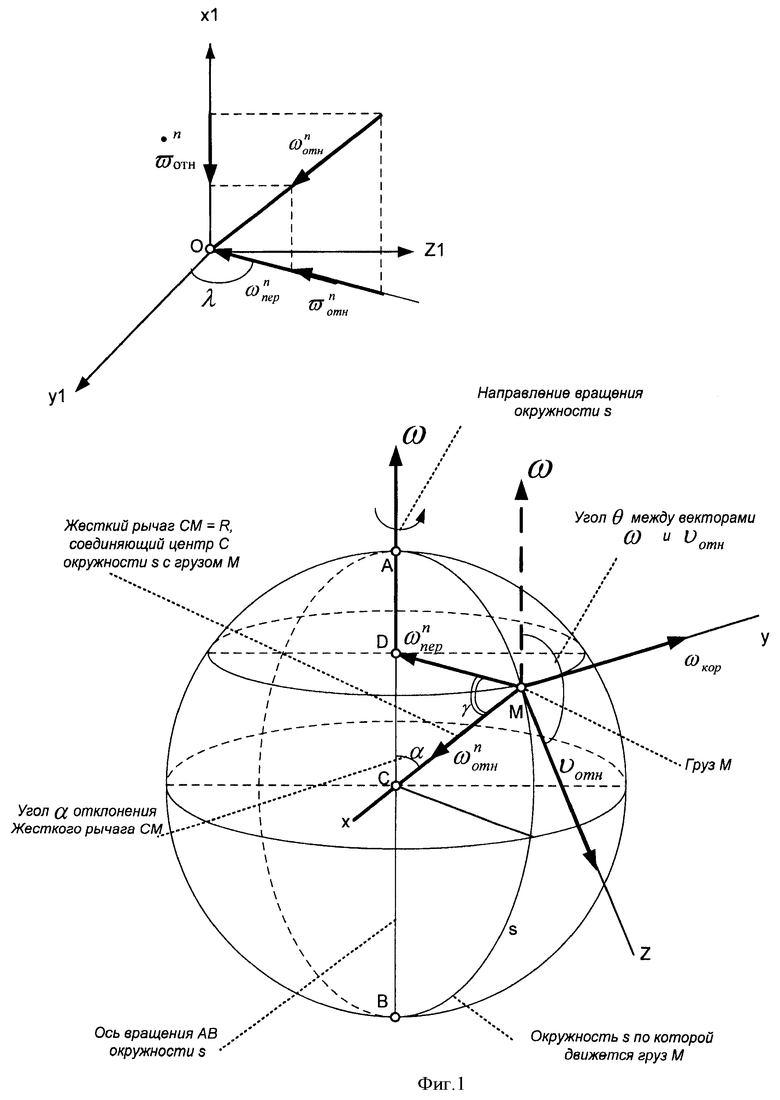
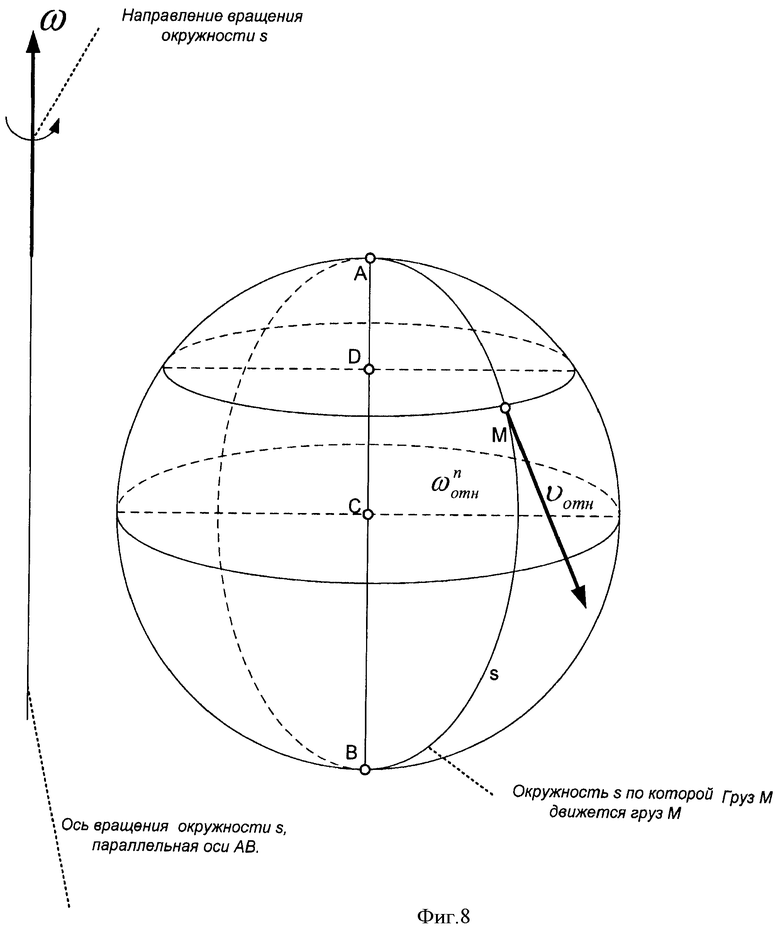
Рассмотрим процессы, происходящие при движении груза при одинаковых угловых скоростях: ω1=ω2=ω (фиг.1). Пусть в момент времени, когда груз М находится в точке А, окружность s совмещается с плоскостью, параллельной плоскости x1Oy1. Аналогично, в момент времени, когда груз М находится в точке В, окружность s совмещается с плоскостью, параллельной плоскости x1Oy1. Рассмотрим сложное движение груза как два простых движения: относительное движение и переносное движение. Пусть относительным движением груза будет движение груза по окружности s. Тогда переносным движением будет вращение окружности s. Пусть Ox1y1z1 - неподвижная система координат, где оси Oх1, Oy1, Oz1 взаимно перпендикулярны; Mxyz - подвижная система координат.
Пусть
- λ - угол отклонения груза М от плоскости x1Oy1;
- α - угол отклонения груза М от оси вращения АВ окружности s; так как ω1=ω2=ω, тогда α=λ;
- γ - угол между ускорениями: нормальным переносным  и нормальным относительным
и нормальным относительным  ;
;
- ωкор - кориолисово ускорение груза М;
- ωа - абсолютное ускорение груза М;
- π=3.1415926 - постоянная пи;
- υотн - скорость груза М при относительном движении;
-  - относительное нормальное ускорение груза М;
- относительное нормальное ускорение груза М;
-  - проекция относительного нормального ускорения груза М на плоскость y1Oz1;
- проекция относительного нормального ускорения груза М на плоскость y1Oz1;
-  - сумма переносного нормального ускорения груза М и проекции относительного нормального ускорения груза М на плоскость y1Oz1;
- сумма переносного нормального ускорения груза М и проекции относительного нормального ускорения груза М на плоскость y1Oz1;
-  - проекция относительного нормального ускорения груза М на плоскость x1Oy1;
- проекция относительного нормального ускорения груза М на плоскость x1Oy1;
-  - проекция абсолютного ускорения груза М на плоскость y1Oz1;
- проекция абсолютного ускорения груза М на плоскость y1Oz1;
-  - проекция абсолютного ускорения груза М на плоскость x1Oy1;
- проекция абсолютного ускорения груза М на плоскость x1Oy1;
-  - тангенциальное относительное ускорение груза М;
- тангенциальное относительное ускорение груза М;
-  - тангенциальное переносное ускорение груза М;
- тангенциальное переносное ускорение груза М;
-  - переносное нормальное ускорение груза М;
- переносное нормальное ускорение груза М;
- F - равнодействующая сил;
-  - проекция равнодействующей сил на плоскость y1Oz1;
- проекция равнодействующей сил на плоскость y1Oz1;
-  - проекция равнодействующей сил на плоскость x1Oy1.
- проекция равнодействующей сил на плоскость x1Oy1.
Угловая скорость находится по формуле ω=πn/30, где n - число оборотов в минуту.
Кориолисово ускорение вычисляется по формуле:
ωкор=2(ωXυотн),
где ω - угловая скорость переносного движения.
Заметим, что в нашем случае угловые скорости переносного движения относительного движения равны, а также постоянны. Поэтому тангенциальные ускорения груза, переносное и относительное, обратятся в нуль:  ;
;  .
.
Таким образом, кориолисово ускорение точки равно удвоенному векторному произведению угловой скорости переносного движения на относительную скорость точки.
Если угол между векторами ω и υотн обозначить через θ, то по модулю:
ωкор=2|ωυотн|sinθ.
Вычислим угол θ через угол α:
θ=π/2+α.
Таким образом, кориолисово ускорение в данном случае равняется:
ωкор=2|ωυотн|sin(π/2+α).
Пусть R - радиус кривизны кривой при относительном движении тела, тогда:
υотн=Rπn/30, тогда
ωкор=2(πn/30)2Rsin(π/2+α)=2(πn/30)2Rcosα.
Далее находим:

Пусть r - расстояние точки М до оси вращения в данный момент времени, выразим r через R, получим:
r/R=sinα, откуда:
 , получаем окончательно:
, получаем окончательно:
 .
.
Таким образом, мы нашли основные силы, участвующие в данном процессе перемещения нашей материальной точки (груза).
 ,
,  ,
,  .
.
Обозначим (πn/30)2R=Z, тогда:
 ,
,  ,
,  .
.
Найдем проекцию на плоскость y1Oz1 (плоскость, перпендикулярную оси вращения окружности, по которой движется груз):
 .
.
Тогда найдем проекцию на плоскость y1Oz1 абсолютного ускорения:
 .
.
Найдем проекцию на плоскость x1Oy1 (плоскость, параллельную оси вращения окружности s, по которой движется груз М):
 .
.
Поскольку проекции кориолисова и переносного ускорений на плоскость x1Oy1 равны нулю (так как кориолисово и переносное ускорения всегда перпендикулярны оси вращения окружности), таким образом, проекция абсолютного ускорения на плоскость x1Oy1 будет равна проекции относительного ускорения на данную плоскость:
 .
.
Вычисляем ускорения для груза с рычагом R=0,25 метра с изменением угла α от 0 до 180 градусов с шагом 10 градусов, данные представлены в таблице 1:
, м/с2
, м/с2
,м/с2
, м/с2
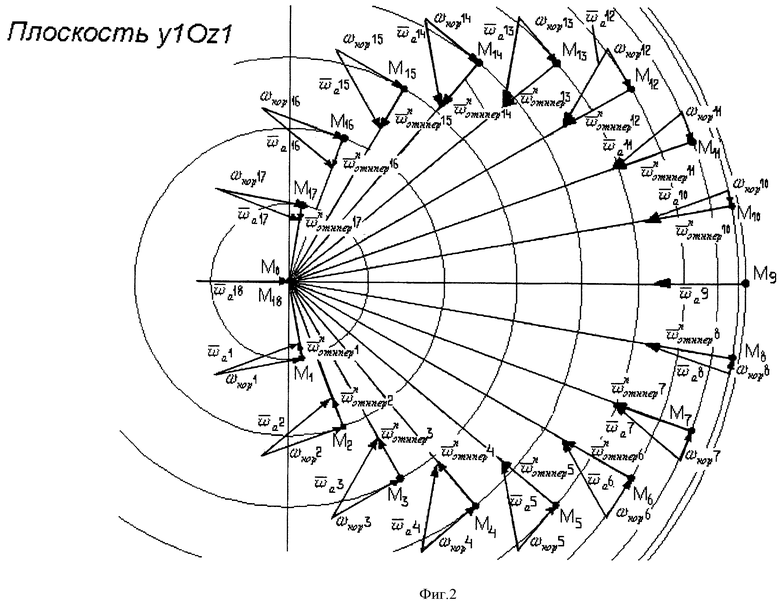
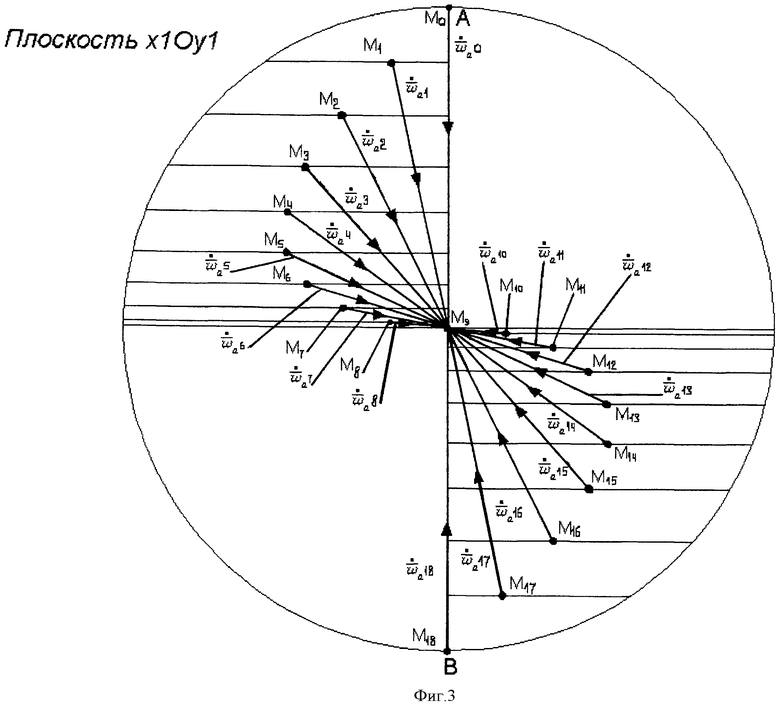
Изменения величин проекций ускорений на плоскости представлены в фиг.2 и фиг.3. Величины векторов пропорциональны длинам отрезков на фиг.2 и фиг.3, из рисунков можно увидеть, как меняются величины проекций абсолютного ускорения на плоскости x1Oy1 и y1Oz1.
Таким образом, при условии, когда масса груза m=1 кг и длина рычага груза R=0,25 метра, находим проекцию равнодействующей сил F на плоскость x1Oy1 и плоскость y1Oz1 в каждый момент времени отклонения груза на угол α от 0 до 180 градусов, с шагом 10 градусов, данные представлены в таблице 2:
 , H
, H , H
, H
где  - проекция равнодействующей сил F на плоскость y1Oz1;
- проекция равнодействующей сил F на плоскость y1Oz1;
 - проекция равнодействующей сил F на плоскость x1Oy1.
- проекция равнодействующей сил F на плоскость x1Oy1.
Из таблицы 2 видно, что вся система будет вибрировать вдоль оси вращения окружности, характер вибраций: возвратно-поступательные (фиг.3), а также система будет вибрировать перпендикулярно оси вращения, характер вибраций: круговые (фиг.2). Поскольку соответствующие проекции сил на плоскости , пропорциональны и направлены так же, как соответствующие проекции на те же плоскости абсолютных ускорений ϖa,  , можно рассматривать на фиг.3 и фиг.2 направления проекций абсолютных ускорений и их величины как направления и величины проекций соответствующих сил. И по фиг.3 и фиг.2 можно судить о направлении вибраций относительно положения груза всей системы. Заметим, что сила инерции имеет направление, противоположное равнодействующей сил F, а соответственно и проекции равнодействующей сил на плоскости y1Oz1 и x1Oy1 будут противоположно направлены соответствующим проекциям сил инерции. Поэтому движение системы будет происходить не в направлении проекций абсолютных ускорений на фиг.3 и фиг.2, а в противоположных направлениях.
, можно рассматривать на фиг.3 и фиг.2 направления проекций абсолютных ускорений и их величины как направления и величины проекций соответствующих сил. И по фиг.3 и фиг.2 можно судить о направлении вибраций относительно положения груза всей системы. Заметим, что сила инерции имеет направление, противоположное равнодействующей сил F, а соответственно и проекции равнодействующей сил на плоскости y1Oz1 и x1Oy1 будут противоположно направлены соответствующим проекциям сил инерции. Поэтому движение системы будет происходить не в направлении проекций абсолютных ускорений на фиг.3 и фиг.2, а в противоположных направлениях.
II. Рассмотрим случай, когда скорости вращения переносного и относительного движений различаются на какой-либо коэффициент k, отличный от нуля. Пусть kω1=ω2.
Тогда получим для переносного движения равенства, аналогичные приведенным выше:
.
Относительная скорость изменится на коэффициент k:
υотн=kRπn/30.
Следовательно, кориолисово ускорение будет равно:
 .
.
Относительное ускорение равняется:

Обозначим (πn/30)2R=Z, тогда:
 , ,
, ,  .
.
Найдем проекцию на плоскость y1Oz1 (плоскость, перпендикулярную оси вращения окружности, по которой движется груз):
 .
.
Тогда найдем проекцию на плоскость y1Oz1 абсолютного ускорения:

Найдем проекцию на плоскость x1Oy1 (плоскость, параллельную оси вращения окружности s, по которой движется груз М):
 .
.
Поскольку проекции кориолисова и переносного ускорений на плоскость x1Oy1 равны нулю (так как кориолисово и переносное ускорения всегда перпендикулярны оси вращения окружности), таким образом, проекция абсолютного ускорения на плоскость x1Oy1 будет равна проекции относительного ускорения на данную плоскость:
.
Из данных равенств несложно заметить, что если коэффициент k>1, т.е. угловая скорость относительного движения больше угловой скорости переносного движения в k раз, то проекция относительного ускорения будет увеличиваться в k2 раз. И наоборот, если угловая скорость относительного движения меньше угловой скорости переносного движения, то относительное ускорение будет уменьшено, чем при одинаковых угловых скоростях переносного и относительного движений. А соответственно этому будет вести себя и сила , прямо пропорциональная проекции относительного ускорения.
III. Рассмотрим случай, когда окружность s с вращающимся грузом вращается вокруг оси, параллельной оси АВ, проходящей через ее центр и лежащей в одной плоскости с окружностью s (фиг.8). Здесь очевидно, что вибрация всей системы будет происходить параллельно оси АВ. Смещение оси вращения окружности повлияет лишь на силы, действующие перпендикулярно данной оси, очевидно, что вибрации, перпендикулярные оси вращения окружности, будут усиливаться либо уменьшаться.
Краткое описание чертежей
Груз М движется по окружности s с постоянной угловой скоростью ω1 (фиг.1), соединенный с центром этой окружности жестким рычагом R; и одновременно данная окружность вращается вокруг оси АВ, проходящей через ее центр и лежащей в одной плоскости с окружностью s, также с постоянной угловой скоростью ω2; угловые скорости вращения груза и окружности могут как совпадать, так и отличаться; такое движение груза необходимо для получения механических колебаний.
Окружность s с вращающимся грузом в п.1 вращается вокруг оси, параллельной оси АВ, проходящей через ее центр и лежащей в одной плоскости с окружностью s (фиг.8).
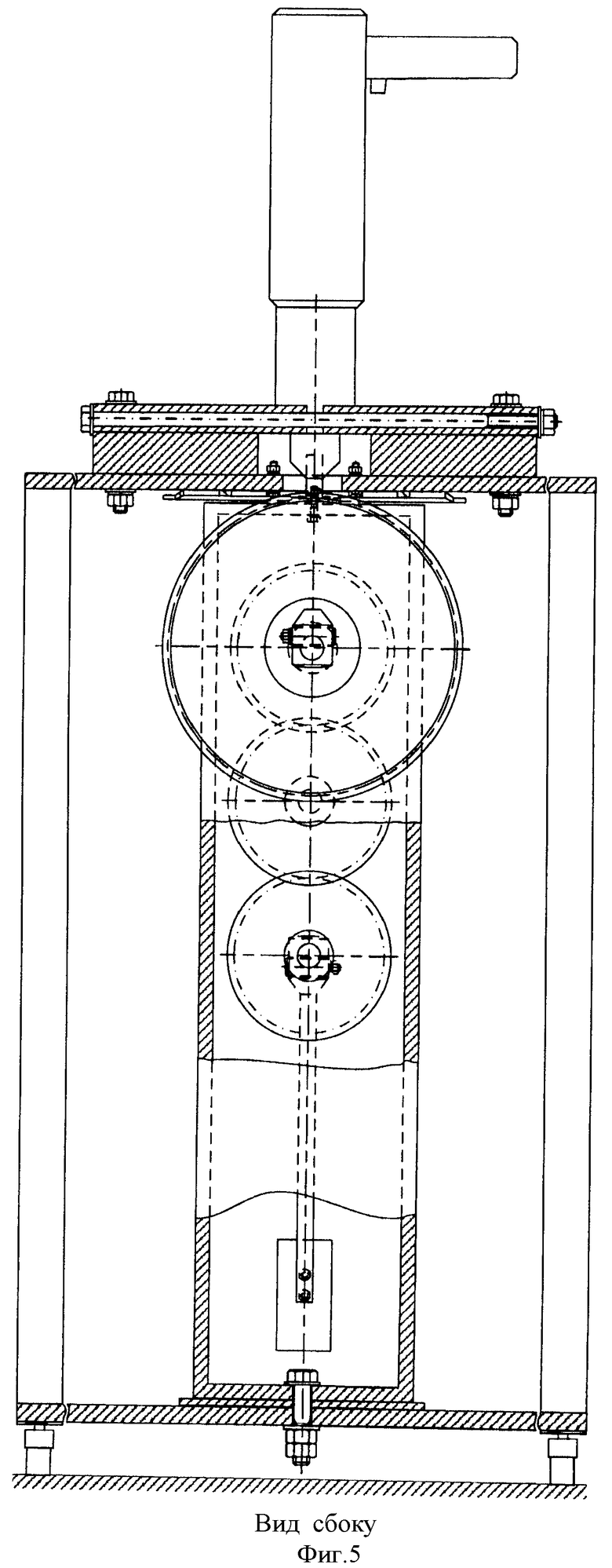
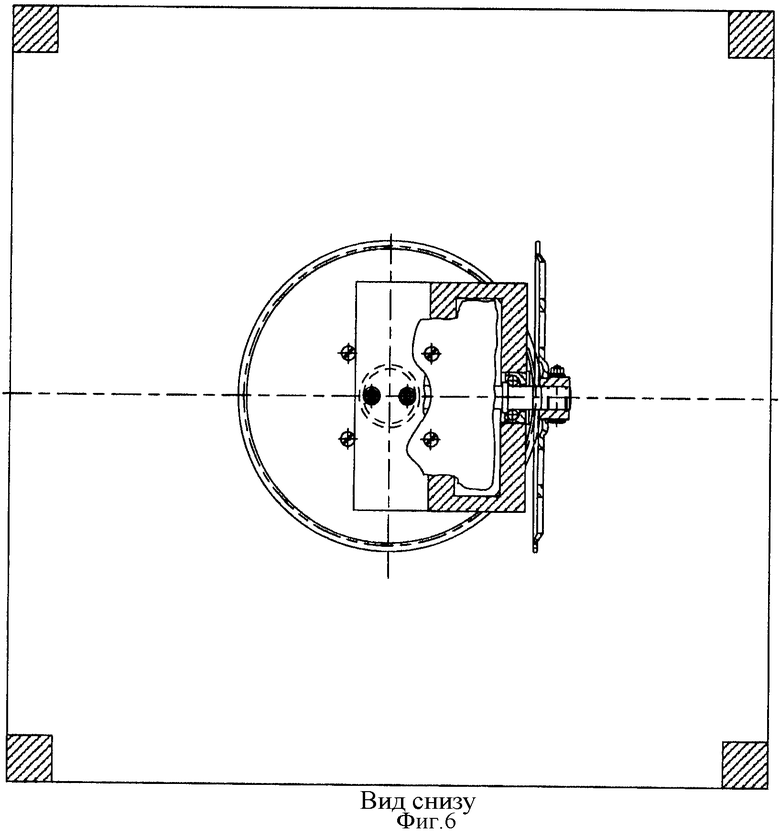
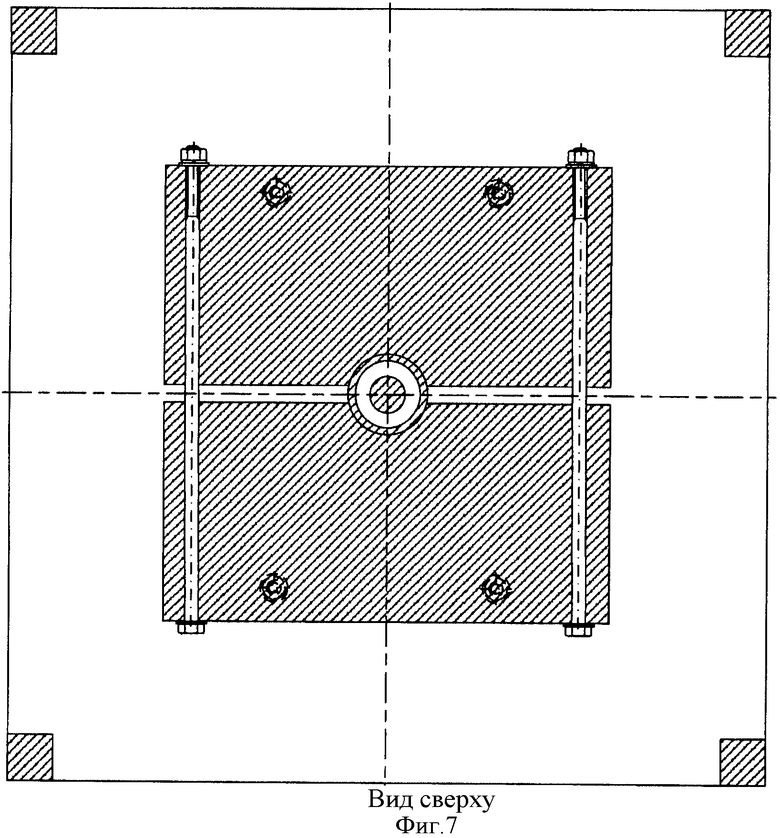
Инерционный вибратор (фиг.4, фиг.5, фиг.6, фиг.7) состоит из тележки на четырех колесах, состоящей из двух параллельных прямоугольных оснований 3, 11, соединенных четырьмя стойками, и неподвижной звездочки 2, закрепленной в центре верхнего основания 3, имеющей в центре отверстие, верхнее основание имеет отверстие так, что отверстия неподвижной звездочки и верхнего основания совпадают; содержит редуктор, находящийся внутри тележки и содержащий подвижную звездочку 4, имеющую сцепление с неподвижной звездочкой тележки так, что плоскости звездочек взаимно перпендикулярны, подвижная звездочка редуктора соединена через валы и цилиндрическую передачу между шестернями на валах с грузом 9 на рычаге 16; корпус электродвигателя 1 жестко закреплен на верхнем основании 3, а подвижная часть 13 электродвигателя, подводимая через отверстия в верхнем основании и неподвижной звездочки, не касаясь верхнего основания и неподвижной звездочки, жестко соединена с редуктором 6; ось вращения редуктора непараллельна оси вращения груза с рычагом редуктора.
Осуществление изобретения
На прямоугольном основании 3 (фиг.4, фиг.5, фиг.6, фиг.7) с помощью крепления 12 установлена электрическая дрель 1, служащая приводом. В патрон электрической дрели вставлена деталь 13, позволяющая закрепить и привести во вращательное движение редуктор 6 параллельно основанию 11. В нижней части редуктора 6 находится отверстие, посредством которого он связан с основанием 11 тележки через болт 8. Между шайбой болта 8 и основанием 11 тележки оставлен зазор, чтобы обеспечить свободное вращение редуктора 6. Между редуктором 6 и основанием 11 тележки положена пластиковая прокладка 10, выполняющая роль подшипника. Звездочка 5 закреплена неподвижно на прямоугольном основании 3 и сцеплена зубьями со звездочкой 4 редуктора 6, передаточное число 1:1. При вращении редуктора 6 обеспечивается вращение с такой же угловой скоростью звездочки 4. Звездочка 4 закреплена на валу, соединенном с шестерней 7, передаточное число звездочки 4 и шестерни 7 1:1. Шестерня 7 приводит в движение шестерню 14, передаточное число 1:1. Шестерня 14 приводит в движение шестерню 15, передаточное число 1:1. Шестерня 15 через вал приводит в движение груз 9 с рычагом 16, передаточное число 1:1. Таким образом, угловая скорость вращения редуктора 6 равна угловой скорости вращения груза 9. Данная конструкция обеспечивает вращение груза 9 во вращающемся редукторе 6, причем оси вращения груза 9 и редуктора 6 взаимно непараллельны и ось вращения редуктора 6 лежит в плоскости вращения груза 9. Данная модель массой 17 кг подпрыгивает, отрываясь от поверхности на примерно на 10 сантиметров, затем снова падает на поверхность, а также постоянно совершает колебательно-вращательные движения параллельно основанию 11.
Для получения отличных угловых скоростей груза 9 и редуктора 6 нужно использовать шестерни 7, 14, 15 с различными радиусами.
Для того чтобы редуктор вращался вокруг оси, параллельной оси вращения окружности, требуется увеличить или уменьшить расстояние от крайней боковой стенки редуктора до детали 13 и расстояние от крайней боковой стенки редуктора 6 до болта 8. Ось вращения редуктора непараллельна оси вращения груза с рычагом редуктора. Это зависит от взаимного расположения подвижной и неподвижной звездочек, их плоскости могут быть как взаимно перпендикулярны, так и находиться под углом к друг другу.
Ось вращения редуктора перпендикулярна оси вращения груза с рычагом редуктора. В данном случае плоскости подвижной и неподвижной звездочек должны быть взаимно перпендикулярными.
Предложенный инерционный вибратор относится к устройствам для получения механических колебаний и может быть использован для интенсификации различных технологических процессов. Инерционный вибратор, содержащий электродвигатель, отличается тем, что состоит из тележки на четырех колесах, состоящей из двух параллельных прямоугольных оснований, соединенных четырьмя стойками, и неподвижной звездочки, закрепленной в центре верхнего основания, имеющей в центре отверстие, верхнее основание имеет отверстие так, что отверстия неподвижной звездочки и верхнего основания совпадают; редуктор, находящийся внутри тележки и содержащий подвижную звездочку, имеющую сцепление с неподвижной звездочкой тележки так, что плоскости звездочек взаимно перпендикулярны, подвижная звездочка редуктора соединена через валы и цилиндрическую передачу между шестернями на валах с грузом на рычаге; корпус электродвигателя жестко закреплен на верхнем основании, а подвижная часть электродвигателя, подводимая через отверстия в верхнем основании и неподвижной звездочки, не касаясь верхнего основания и неподвижной звездочки, жестко соединена с редуктором; ось вращения редуктора непараллельна оси вращения груза с рычагом редуктора. Технический результат, достигаемый при реализации заявленного инерционного вибратора, заключается в том, что вибрации происходят сразу в двух взаимно перпендикулярных плоскостях. 8 ил., 2 табл.
Инерционный вибратор, содержащий электродвигатель, отличающийся тем, что состоит из тележки на четырех колесах, состоящей из двух параллельных прямоугольных оснований, соединенных четырьмя стойками, и неподвижной звездочки, закрепленной в центре верхнего основания, имеющей в центре отверстие, верхнее основание имеет отверстие так, что отверстия неподвижной звездочки и верхнего основания совпадают; редуктор, находящийся внутри тележки и содержащий подвижную звездочку, имеющую сцепление с неподвижной звездочкой тележки так, что плоскости звездочек взаимно перпендикулярны, подвижная звездочка редуктора соединена через валы и цилиндрическую передачу между шестернями на валах с грузом на рычаге; корпус электродвигателя жестко закреплен на верхнем основании, а подвижная часть электродвигателя, подводимая через отверстия в верхнем основании и неподвижной звездочки, не касаясь верхнего основания и неподвижной звездочки, жестко соединена с редуктором; ось вращения редуктора непараллельна оси вращения груза с рычагом редуктора.
| ИНЕРЦИОННЫЙ ЦЕНТРОБЕЖНЫЙ ДВИГАТЕЛЬ | 1993 |
|
RU2034170C1 |
| ВИБРАТОР | 2004 |
|
RU2267349C1 |
| Многоканальный делитель мощности | 1988 |
|
SU1626283A1 |

