Перекрестная ссылка на родственные заявки
[0001]
Настоящее изобретение в соответствии с Разделом 35 Свода законов США, §119, заявляет приоритет японской патентной заявки № 2017-222158, поданной 17 ноября 2017 года. Содержание этих заявок полностью включено в настоящее описание путем отсылки.
Область техники
[0002]
Настоящее изобретение относится к устройству управления транспортным средством. В частности, настоящее изобретение относится к устройству управления транспортным средством, предназначенному для предотвращения столкновения транспортного средства с препятствиями.
Уровень техники
[0003]
Патентная заявка JP 2007-253714 A раскрывает встроенное радарное устройство транспортного средства, предназначенное для определения наличия следующего впереди транспортного средства на своей полосе, по которой движется заявленное транспортное средство, с использованием виртуальной ширины определения для своей полосы. Когда радарное устройство обнаруживает следующее впереди транспортное средство, ближайшее к заявленному транспортному средству, среди окружающих заявленное транспортное средство транспортных средств, обнаруживаемых встроенным радаром в пределах ширины определения для своей полосы, ближайшее следующее впереди транспортное средство считается следующим впереди транспортным средством на своей полосе. Когда радарное устройство распознает ближайшее следующее впереди транспортное средство на своей полосе, он применяет большую ширину определения для своей полосы к ближайшему следующему впереди транспортному средству на своей полосе и при этом малую ширину определения для своей полосы к другим следующим впереди транспортным средствам.
[0004]
В соответствии с радарным устройством, распознав ближайшее следующее впереди транспортное средство на своей полосе, возможно предотвратить ошибочное распознавание других транспортных средств на соседней полосе в качестве следующего впереди транспортного средства на своей полосе. Тем не менее, при распознавании ближайших следующих впереди транспортных средств на своей полосе возникает следующая проблема. А именно, когда ближайшее следующее впереди транспортное средство на своей полосе не было распознано, поскольку следующее впереди транспортное средство, ближайшее к заявленному транспортному средству, распознанное встроенным радаром, движется далеко от заявленного транспортного средства, трудно различить, движется ли обнаруженное ближайшее следующее впереди транспортное средство на своей или соседней полосе.
[0005]
Если значение «по умолчанию» ширины определения для своей полосы установлено на малую ширину, можно предотвратить то, что обнаруженное ближайшее следующее впереди транспортное средство распознается, как ближайшее следующее впереди транспортное средство на своей полосе, даже если оно фактически движется на соседней полосе. Тем не менее, если за значение «по умолчанию» принята малая ширина, для распознавания реального объекта на своей полосе требуется время. Это обусловлено тем, что если значение «по умолчанию» установлено на малую ширину, невозможно распознать реальный объект до тех пор, пока расстояние до заявленного транспортного средства не уменьшится до определенного расстояния.
[0006]
Если на распознавание реального объекта, подлежащего распознаванию, требуется время, возникает следующая проблема, в частности, когда транспортное средство, движущееся с высокой скоростью, приближается к концу затора в движении. То есть, если транспортное средство, следующее впереди заявленного транспортного средства, находится в конце затора в движении, для предотвращения столкновения с этим самым последним в заторе транспортным средством необходимо, чтобы заявленное транспортное средство начало управляемое замедление на относительно большом расстоянии. Однако, если на распознавание самого последнего в заторе транспортного средства требуется время, управляемое замедление будет начато после того, как заявленное транспортное средство приблизится к самому последнему в заторе транспортному средству на определенное расстояние. Таким образом, необходимо, чтобы заявленное транспортное средство начало быстро замедляться, что вызывает чувство дискомфорта у лица, находящегося в заявленном транспортного средства.
[0007]
Настоящее изобретение направлено на решение вышеописанной проблемы, и объектом данного раскрытия является разработка средств предотвращения столкновения заявленного транспортного средства с ближайшим следующим впереди транспортным средством даже в том случае, когда трудно различить полосу, по которой движется ближайшее следующее впереди транспортное средство.
Сущность изобретения
[0008]
Первый аспект настоящего изобретения относится к устройству управления транспортным средством, устраняющему вышеописанную проблему и имеющему следующие признаки.
Устройство управления транспортным средством содержит устройство обнаружения движущихся объектов и блок управления.
Устройство обнаружения движущихся объектов выполнено с возможностью обнаружения движущегося объекта впереди заявленного транспортного средства.
Блок управления выполнен с возможностью выполнения управляемого замедления заявленного транспортного средства на основании результата обнаружения движущегося объекта.
Упомянутый блок управления дополнительно выполнен с возможностью осуществления следующих действий:
вычисление относительного расстояния по направлению ширины заявленного транспортного средства для заявленного транспортного средства между заявленным транспортным средством и ближайшим к нему движущимся объектом среди всех движущихся объектов; а также
определение необходимо или нет выполнять управляемое замедление путем сопоставления относительного расстояния и ширины определения для установления своей полосы, по которой движется заявленное транспортное средство, причем ширина определения для своей полосы устанавливается на основании относительной скорости ближайшего движущегося объекта в направлении движения заявленного транспортного средства.
[0009]
Второй аспект настоящего изобретения имеет следующие признаки в зависимости от первого аспекта.
Упомянутый блок управления дополнительно выполнен с возможностью переменно устанавливать ширину определения для своей полосы.
Упомянутый блок управления выполнен с возможностью, когда знак относительной скорости ближайшего движущегося объекта в направлении движения заявленного транспортного средства является отрицательным, устанавливать ширину определения для своей полосы на расширение ширины по мере увеличения абсолютного значения относительной скорости ближайшего движущегося объекта в направлении движения заявленного транспортного средства.
[0010]
Третий аспект настоящего изобретения имеет следующие признаки в зависимости от первого аспекта.
Упомянутый блок управления дополнительно выполнен с возможностью устанавливать первый поправочный коэффициент для коррекции ширины определения для своей полосы.
Упомянутый блок управления выполнен с возможностью, когда знак относительной скорости ближайшего движущегося объекта в направлении ширины транспортного средства для заявленного транспортного средства является отрицательным, устанавливать первый поправочный коэффициент на большее значение по мере увеличения абсолютного значения относительной скорости в направлении ширины заявленного транспортного средства.
[0011]
Четвертый аспект настоящего изобретения имеет следующие признаки в зависимости от первого аспекта.
Упомянутый блок управления дополнительно выполнен с возможностью устанавливать второй поправочный коэффициент для коррекции ширины определения для своей полосы.
Упомянутый блок управления выполнен с возможностью, когда угол между продольной осью ближайшего движущегося объекта и осевой линией своей полосы находится в пределах предварительно заданного диапазона, устанавливать второй поправочный коэффициент на большее значение по мере увеличения упомянутого угла.
[0012]
Пятый аспект настоящего изобретения имеет следующие признаки в зависимости от первого аспекта.
Упомянутый блок управления дополнительно выполнен с возможностью осуществления следующих действий:
определение находится или нет ближайший движущейся объект на своей полосе на основании сопоставления между ширины определения для своей полосы и относительного расстояния; а также
выполнение первого управляемого замедления заявленного транспортного средства, когда определено, что ближайший движущийся объект находится на своей полосе.
Первое управляемое замедление выполняется на основании относительной скорости ближайшего движущегося объекта, которое определено, как находящееся на своей полосе, в направлении движения заявленного транспортного средства.
[0013]
Шестой аспект настоящего изобретения имеет следующие признаки в зависимости от первого аспекта.
Упомянутый блок управления дополнительно выполнен с возможностью осуществления следующих действий:
Определение, находится или нет ближайший движущийся объект на расположенной рядом полосе на основании сопоставления ширины определения для расположенной рядом полосы и относительного расстояния, причем ширина определения для расположенной рядом полосы устанавливается путем суммирования ширины расположенной рядом полосы и ширины определения для своей полосы; а также
выполнение второго управляемого замедления заявленного транспортного средства, если определено, что ближайший движущийся объект находится на расположенной рядом полосе.
Второе управляемое замедление выполняется на основании относительной скорости ближайшего движущегося объекта, который определен, как находящийся на расположенной рядом полосе, в направлении движения заявленного транспортного средства.
[0014]
В соответствии с первым аспектом определяется, необходимо или нет выполнять управляемое замедление посредством ширины определения для своей полосы, устанавливаемой на основании относительной скорости ближайшего движущегося объекта в направлении движения заявленного транспортного средства. Иными словами, выполнять или нет управляемое замедление, определяется не только, когда ближайший движущийся объект находится на своей полосе, но также при его нахождении на расположенной рядом полосе. Следовательно, управляемое замедление можно выполнять даже в том случае, если трудно различить полосу, по которой движется ближайшее следующее впереди транспортное средство.
[0015]
Согласно второму аспекту, когда знак относительной скорости ближайшего движущегося объекта в направлении движения заявленного транспортного средства является отрицательным, ширина определения для своей полосы устанавливается на расширение ширины по мере увеличения абсолютного значения относительной скорости в направлении движения. Знак относительной скорости в направлении движения является отрицательным, что означает, что расстояние в направлении движения между заявленным транспортным средством и ближайшим движущимся объектом уменьшается. Поэтому, если ширина определения для своей полосы установлена на расширение ширины в соответствии с абсолютным значением относительной скорости в направлении движения, то в случае уменьшения расстояния в направлении движения можно выполнить управляемое замедление, предполагая, что ближайший движущийся объект вторгнется на свою полосу в ближайшее время.
[0016]
Согласно третьему аспекту, когда знак относительной скорости ближайшего движущегося объекта в направлении ширины транспортного средства для заявленного транспортного средства является отрицательным, первый поправочный коэффициент, корректирующий ширину определения для своей полосы, устанавливается на большее значение по мере увеличения абсолютного значения относительной скорости в направлении ширины транспортного средства. Знак относительной скорости в направлении движения является отрицательным, что означает уменьшение расстояния в направлении ширины транспортного средства между заявленным транспортным средством и ближайшим движущимся объектом. Поэтому, если первый поправочный коэффициент устанавливается на большее значение в соответствии с абсолютной величиной относительной скорости в направлении ширины транспортного средства, то в случае уменьшения расстояния в направлении ширины транспортного средства можно выполнить управляемое замедление, предполагая, что ближайший движущийся объект вторгнется на свою полосу в ближайшее время.
[0017]
Согласно четвертому аспекту, когда угол между продольной осью ближайшего движущегося объекта и осевой линией своей полосы находится в пределах предварительно заданного диапазона, второй поправочный коэффициент, корректирующий ширину определения для своей полосы, устанавливается на большее значение по мере увеличения упомянутого угла. Надлежащий выбор заданного диапазона позволяет определить уменьшение расстояния в направлении ширины транспортного средства. Поэтому в случае уменьшения расстояния в направлении ширины транспортного средства можно выполнить управляемое замедление, предполагая, что ближайший движущийся объект вторгнется в свою полосу в ближайшее время.
[0018]
Согласно пятому аспекту, можно надлежащим образом предотвратить столкновение заявленного транспортного средства с ближайшим движущимся объектом, находящимся на своей полосе.
[0019]
Согласно шестому аспекту, можно надлежащим образом предотвратить столкновение заявленного транспортного средства с ближайшим движущимся объектом, находящимся в данное время на расположенной рядом полосе и имеющим возможность вторгнуться в свою полосу в ближайшее время.
Краткое описание чертежей
[0020]
ФИГ. 1 представляет собой схему, демонстрирующую конфигурацию системы автоматического привода с устройством управления транспортным средством согласно первому варианту осуществления настоящего изобретения;
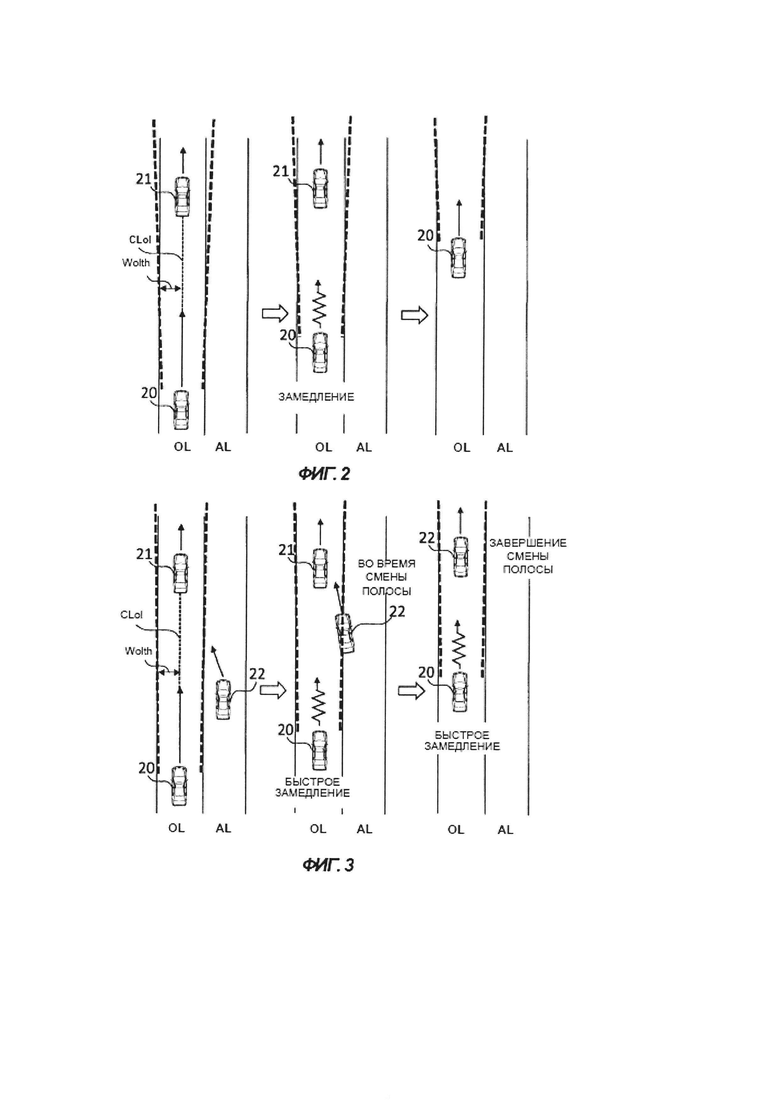
ФИГ. 2 представляет собой чертеж, для описания схемы стандартного управляемого замедления с использованием ширины Wolth определения для своей полосы;
ФИГ. 3 представляет собой чертеж, для описания проблемы стандартного управляемого замедления;
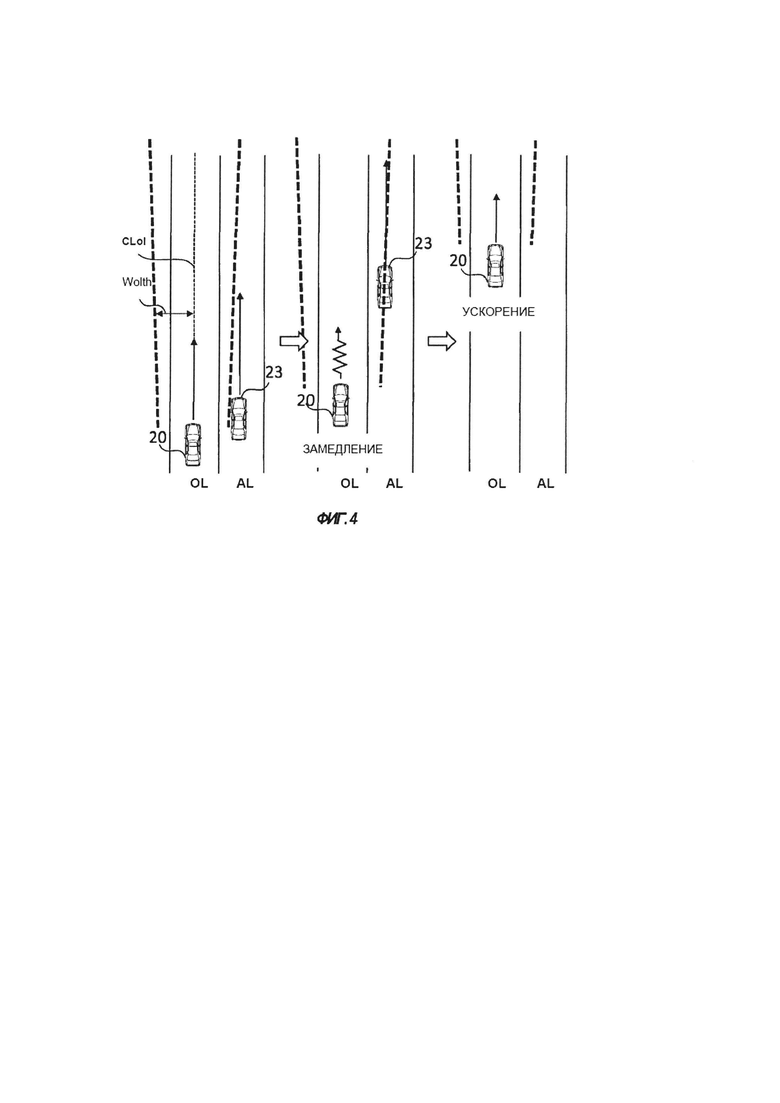
На ФИГ. 4 представляет собой чертеж, для описания другой проблемы стандартного управляемого замедления;
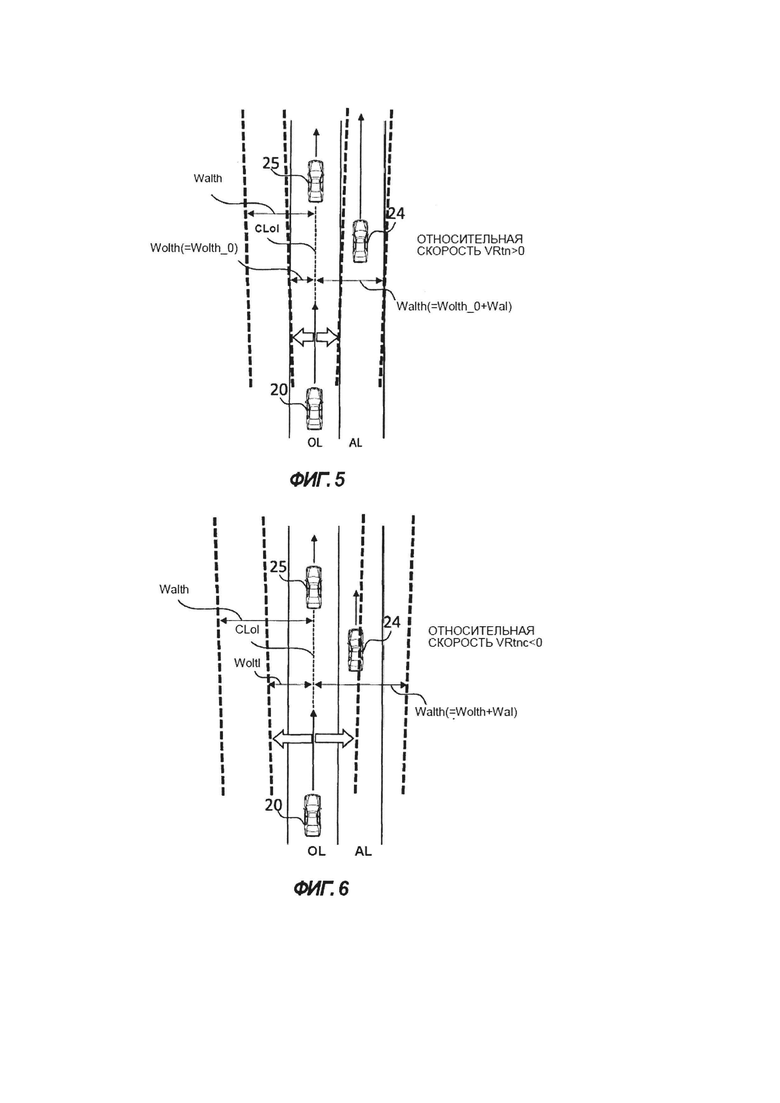
ФИГ. 5 представляет собой чертеж, для описания схемы модифицированной обработки ширины Wolth определения для своей полосы при помощи блока установления ширины определения;
ФИГ. 6 представляет собой чертеж, для описания схемы модифицированной обработки ширины Wolth определения для своей полосы при помощи блока установления ширины определения я;
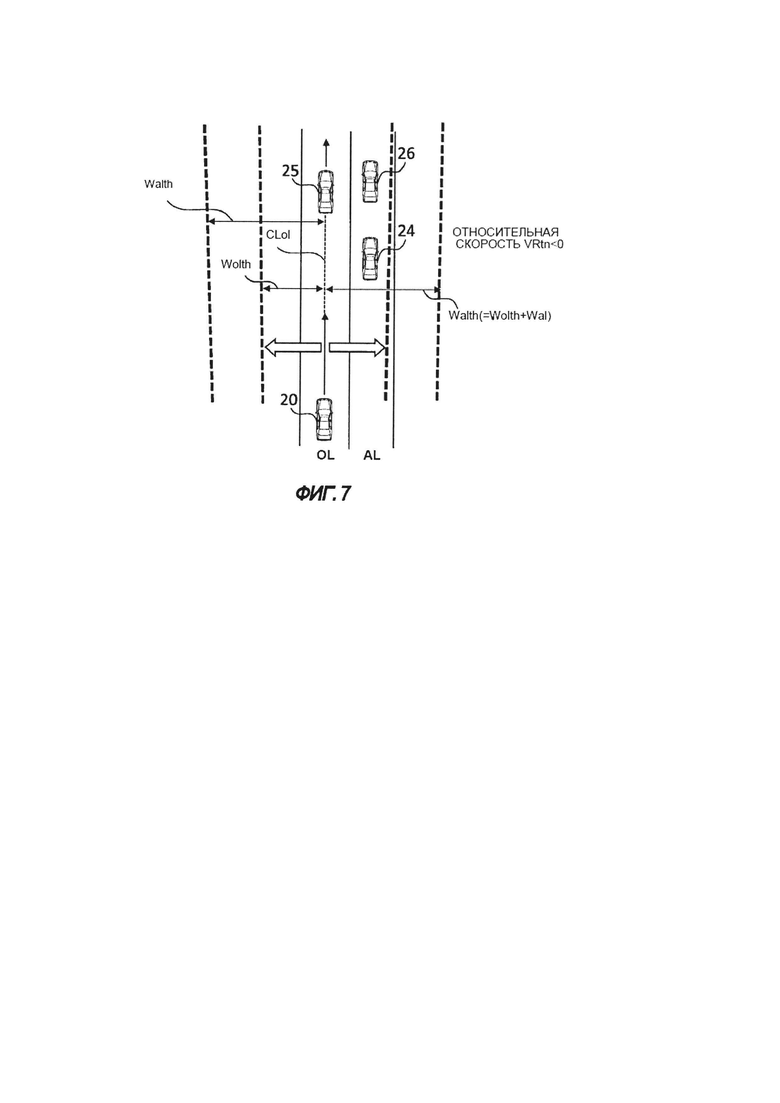
ФИГ. 7 представляет собой чертеж, для описания схемы модифицированной обработки ширины Wolth определения для своей полосы при помощи блока установления ширины определения;
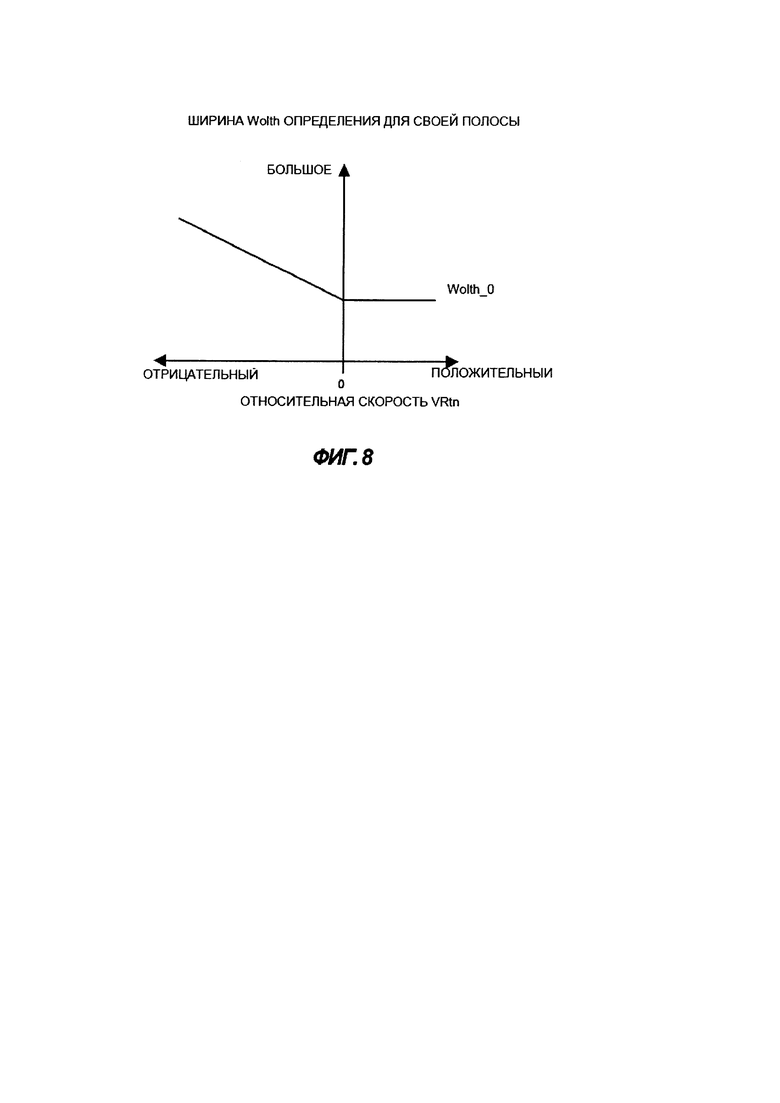
ФИГ. 8 представляет собой график, показывающий пример соотношения между относительной скоростью VRtn движущегося объекта NFOn и шириной Wolth определения для собственной полосы,;
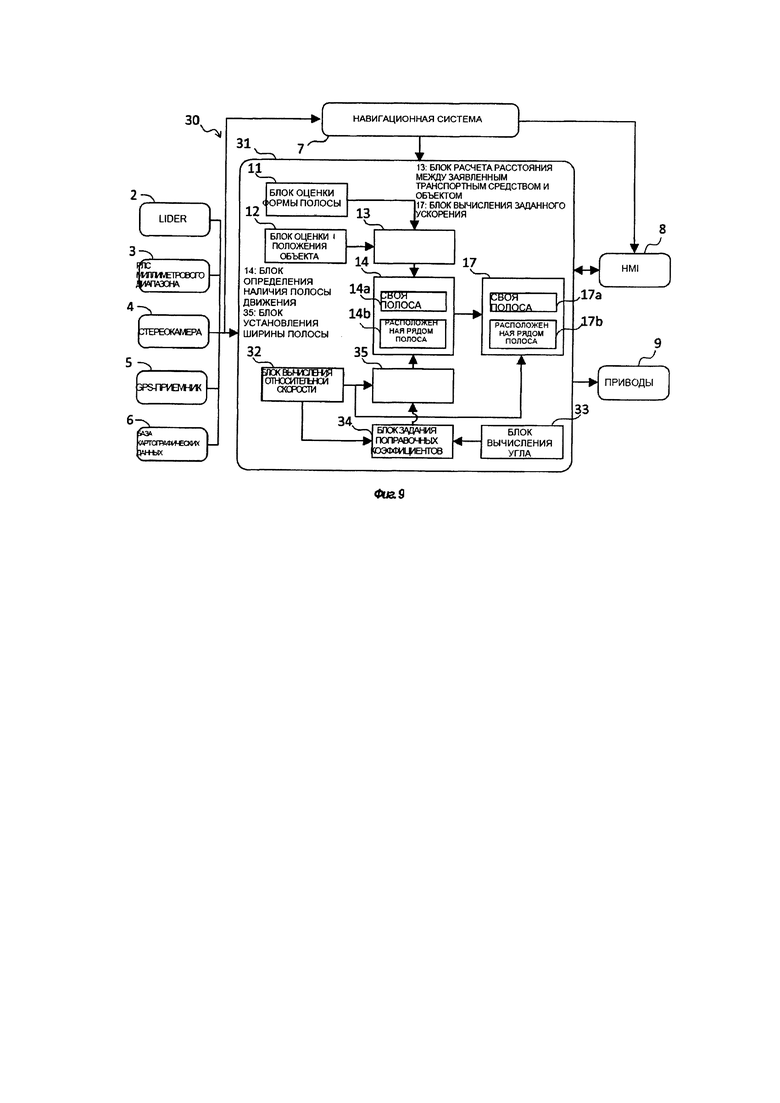
ФИГ. 9 представляет собой схему, демонстрирующую конфигурацию системы автоматического привода, для которой использовано устройство управления транспортным средством согласно второму варианту осуществления;
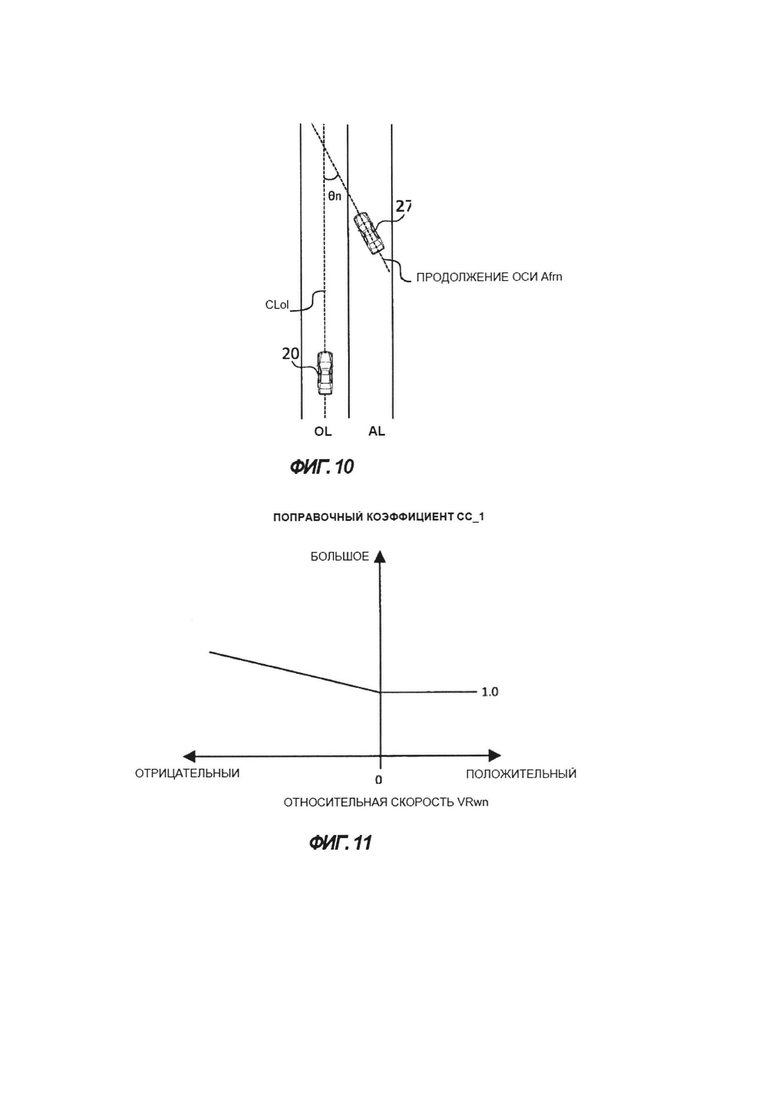
ФИГ. 10 представляет собой схему, описывающую угол θn между осевой линией CLol и продолжением продольной оси Afrn;
ФИГ. 11 представляет собой график, показывающий пример зависимости между относительной скоростью VRwn и поправочным коэффициентом CC_1;
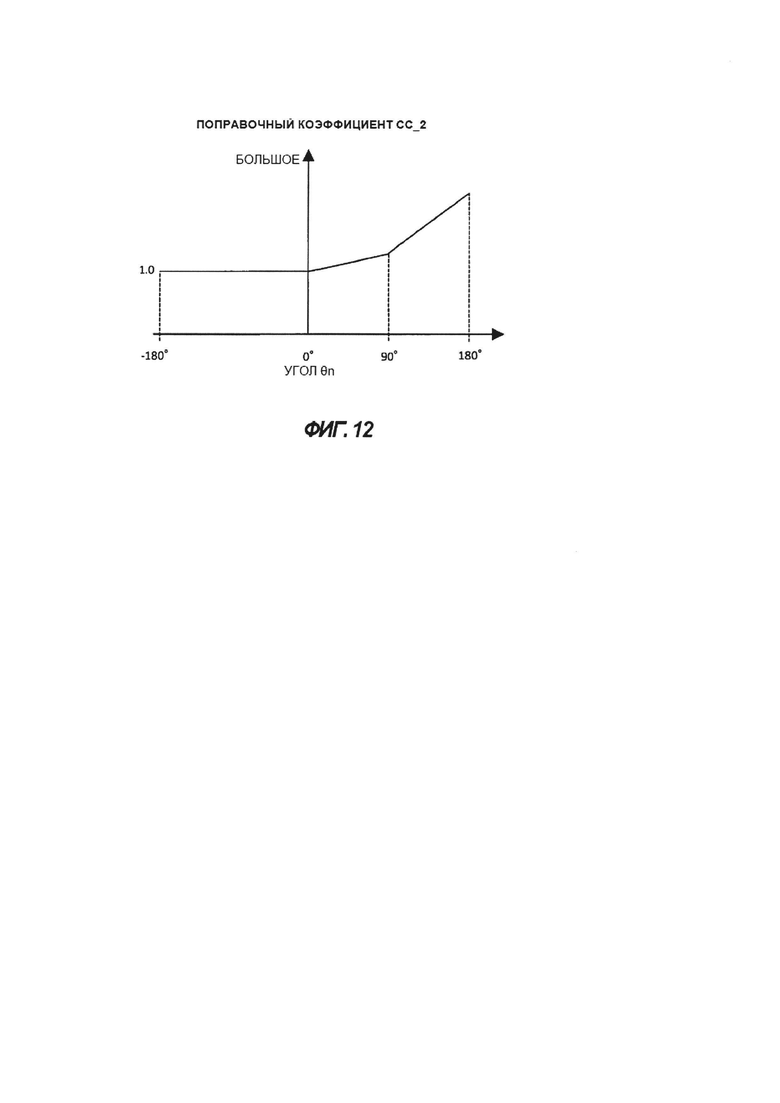
ФИГ. 12 представляет собой диаграмму, показывающую пример зависимости между углом θn и поправочным коэффициентом CC_2;
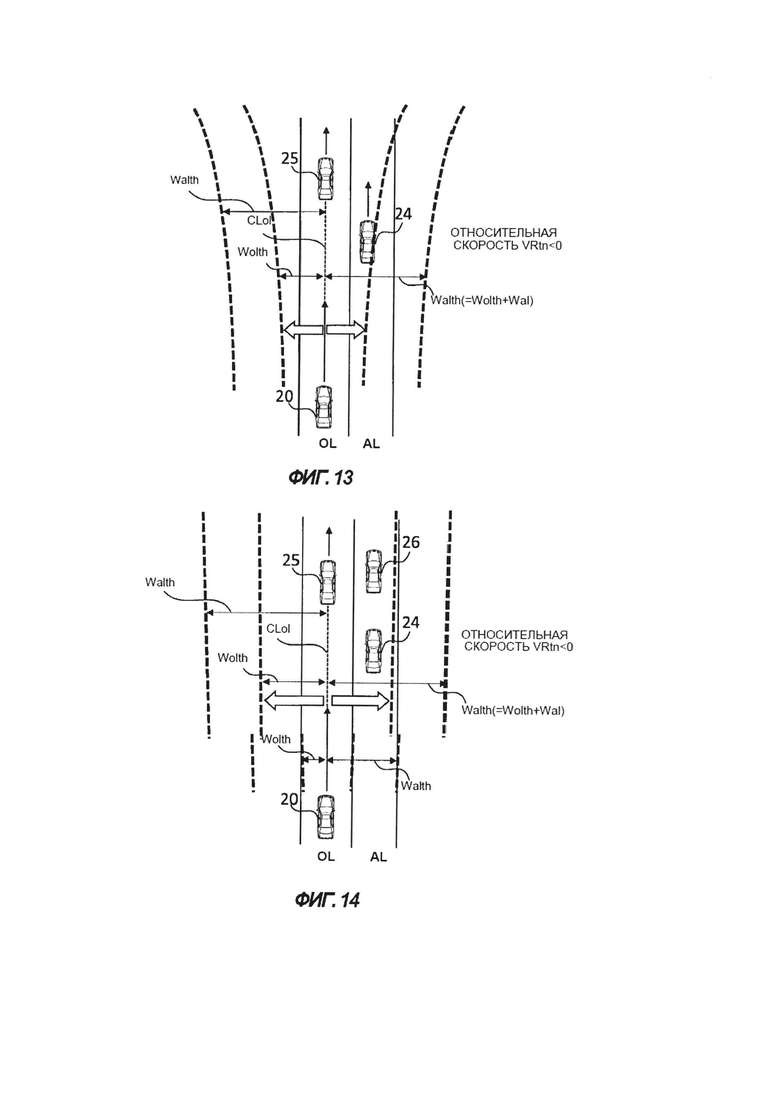
ФИГ. 13 представляет собой чертеж для описания схемы модифицированной обработки блоком задания ширины определения, в котором используется другая ширина Wolth определения для своей полосы; и
ФИГ. 14 представляет собой чертеж для описания схемы модифицированной обработки блоком задания ширины определения, в котором используется другая ширина Wolth определения для своей полосы.
Описание вариантов осуществления
[0021]
Варианты осуществления настоящего изобретения будут подробно раскрыты ниже со ссылкой на прилагаемые чертежи. Необходимо отметить, что элементы, являющиеся общими для соответствующих чертежей, имеют одинаковые ссылочные обозначения, а их описание не повторяется. Кроме того, настоящее изобретение не ограничено описанными ниже вариантами осуществления.
[0022]
Первый вариант осуществления
Первый вариант осуществления настоящего изобретения будет описан со ссылкой на ФИГ. 1–8.
[0023]
1.Конфигурация системы автоматического привода
На ФИГ. 1 изображена схема, демонстрирующая конфигурацию системы автоматического привода, для которой использовано устройство управления транспортным средством согласно первому варианту осуществления. Система автоматического привода установлена в транспортном средстве и выполнена с возможностью автономного осуществления различных операций помощи в управлении движением транспортного средства или автоматического выполнения этих операций управления с разрешения водителя. Транспортное средство, оснащенное системой автоматического привода, также называют «заявленным транспортным средством».
[0024]
Система 1 автоматического привода, показанная на ФИГ. 1, содержит электронный блок 10 управления (ЭБУ), выполняющий функции устройства управления транспортным средством, и автономные датчики распознавания. К автономным датчикам распознавания относится прибор LIDER (то есть лазерная система обнаружения и определения дальности, т.н. лазерный локатор) 2, радар 3 миллиметрового диапазона и стереокамера 4. Такие автономные датчики распознавания подключены к ЭБУ 10 непосредственно или через сеть передачи данных, в частности, контроллерную сеть (CAN), встроенную в заявленное транспортное средство. На основании информации об объекте, полученной автономными датчиками распознавания, ЭБУ 10 способен распознать ситуацию, связанную с окружением заявленного транспортного средства.
[0025]
Кроме того, система 1 автоматического привода содержит приемник 5 глобальной системы позиционирования (GPS), картографическую базу 6 данных, навигационную систему 7, человеко-машинный интерфейс (HMI) и исполнительные элементы 9.
[0026]
Приемник GPS является средством для получения информации о местоположении. Информация о местоположении указывает на местоположение заявленного транспортного средства на основании сигнала, передаваемого, по меньшей мере, одним спутником GPS. Картографическая база 6 данных формируется, например, на устройстве хранения данных, в частности, жестком диске или твердотельном накопителе, установленном в заявленном транспортном средстве. Картографическая информация в картографической базе 6 данных содержит информацию о расположении и форме дороги, информацию о расположении перекрестков и ответвлений, полосах движения дороги и иную подобную информацию. Навигационная система 7 выполнена с возможностью расчета маршрута движения заявленного транспортного средства на основании информации о местоположении заявленного транспортного средства, полученной приемником 5 GPS, и картографической информации, хранящейся в картографической базе 6 данных. Кроме того, навигационная система 7 выполнена с возможностью передачи информации о рассчитанном маршруте движения водителю заявленного транспортного средства через HMI 8 и вывода информации о рассчитанном маршруте движения в ЭБУ 10.
[0027]
HMI 8 представляет собой интерфейс для обмена информацией между лицом, находящимся в заявленном транспортном средстве, и ЭБУ 10. Каждый из исполнительных элементов 9 выполнен с возможностью осуществления действия в ответ на воздействующий сигнал от ЭБУ 10, результатом которого становится изменение состояние движения заявленного транспортного средства. Исполнительные элементы 9 предусмотрены, например, в системе привода, тормозной системе и системе рулевого управления. Кроме того, внутренние датчики, в частности, датчик скорости транспортного средства и датчик ускорения, предусмотрены в системе 1 автоматического привода. Эти датчики выполнены с возможностью получения информации о состоянии движения транспортного средства.
[0028]
ЭБУ 10 представляет собой электронный блок управления, содержащий, по меньшей мере, один центральный процессор (ЦП), по меньшей мере, одно постоянное запоминающее устройство (ПЗУ) и, по меньшей мере, одно оперативное запоминающее устройство (ОЗУ). Различные программы для автоматического привода заявленного транспортного средства и различные данные, в том числе картографические данные, хранятся в ПЗУ. Программа, хранящаяся в ПЗУ, загружается в ОЗУ и выполняется ЦП, что позволяет ЭБУ 10 выполнять различные упомянутые ниже функции. ЭБУ 10 может быть скомпоновано из нескольких ЭБУ.
[0029]
На ФИГ. 1 среди функций для помощи в управлении движением, выполняемых ЭБУ 10, в виде блоков представлены функции, относящиеся к распознаванию объектов и функции, относящиеся к управляемому замедлению. Другие функции для помощи в управлении движением не показаны.
[0030]
ЭБУ 10 имеет функции для распознавания объектов поблизости от заявленного транспортного средства и различения объектов, находящихся на полосе, по которой движется заявленное транспортное средство (далее «своя полоса OL»), объектов, находящихся на полосе, расположенной рядом со своей полосой (далее «расположенная рядом полоса AL»), и объектов, находящихся вне своей полосы OL и расположенной рядом полосы AL. Эта функция реализована блоком 11 оценивания формы полосы, блоком 12 оценивания местоположения объекта, блоком 13 расчета расстояния между заявленным транспортным средством и объектом, блоком 14 определения наличия полосы движения, блоком 15 вычисления относительной скорости и блоком 16 установки ширины определения полосы. Кроме того, ЭБУ 10 содержит функцию определения типа управляемого замедления заявленного транспортного средства на основании результата различения объектов, находящихся поблизости от заявленного транспортного средства. Эта функция реализована блоком 17 вычисления заданного ускорения в ЭБУ 10. Указанные блоки 11, 12, 13, 14, 15, 16 и 17 реализованы не в виде аппаратных средств в составе ЭБУ 10, а в виде программного обеспечения, то есть сохраненной в ПЗУ программы, выполняемой ЦП.
[0031]
В данном случае под «объектами, находящимися поблизости от заявленного транспортного средства», понимают движущиеся объекты, в частности, пешеходов, велосипеды и транспортные средства, а также неподвижные объекты, в частности, уличные зеленые насаждения, телефонные будки, здания, дорожные конструкции. Движущиеся объекты не ограничиваются объектами, находящимися в состоянии движения, и могут включать остановившиеся или стоящие объекты. Иными словами, под движущимися объектами понимают объекты, не привязанные к определенному положению на дороге и в других зонах при обнаружении автономными датчиками распознавания и способные прийти в движение в ближайшее время. В дальнейшем такой движущийся объект называют «движущимся объектом NFO». Кроме того, «расположенная рядом полоса AL» относится к полосе, расположенной рядом со своей полосой OL с левой или правой стороны. Тем не менее, понятие «расположенная рядом полоса AL» включает в себя боковую полосу, примыкающую к своей полосе OL с левой или правой стороны. Боковая полоса относится к области, расположенной далее снаружи, чем крайняя внешняя разделительная линия полосы (граница полосы), когда заявленное транспортное средство движется вдоль крайней полосы. Тем не менее, полосы, по которым другие транспортные средства, отличающиеся от заявленного транспортного средства, могут двигаться в направлении, противоположном направлению движения заявленного транспортного средства, исключаются из «расположенной рядом полосы AL».
[0032]
Блок 11 оценивает форму и положение полосы поблизости от заявленного транспортного средства. Обработку по оценке формы и положения полосы выполняют, например, следующим образом. Сначала фиксируют данные мгновенного изображения перед заявленным транспортным средством, полученного стереокамерой 4, после чего вычисляют вектор градиента яркости каждого пикселя мгновенного изображения. Следующим шагом оценивают вектор градиента яркости каждого пикселя и определяют разделительную линию полосы движения на основании результата оценки. После этого определяют осевую линию распознанной разделительной линии и оценивают форму и положение распознанной полосы, используя пиксели, формирующие эту осевую линию, и предварительно заданную модель формы. Следует отметить, что такая обработка по оценке известна и раскрыта, например, в патентной заявке JP 2008-21102 A. Если информация о форме полосы движения включена в картографическую информацию картографической базы 6 данных, форма и положение полосы может быть оценена на основании информации о форме и местоположении заявленного транспортного средства.
[0033]
Блок 12 оценивает положение объекта, находящегося поблизости от заявленного транспортного средства. Обработку по оценке положения объекта выполняют, например, следующим образом. Сначала регистрируют данные измерения расстояния до объекта, полученные прибором LIDER 2, после чего выполняют обработку по группированию. Обработку по группированию выполняют на основании местоположения и высоты каждой точки измерения расстояния на опорном кадре, в котором находится заявленное транспортное средство. При такой обработке по группированию поддерживается непрерывность с результатом обработки предыдущего кадра. Впоследствии, сгруппированные точки измерения расстояния окружают прямоугольной рамкой наземного ориентира на опорном кадре с целью формирования наземного ориентира. Необходимо отметить, что положение объекта может быть оценено на основании данных измерения расстояния до объекта, полученных радаром 3 миллиметрового диапазона. Обработка по оценке, применимая к настоящему изобретению, не ограничивается вышеупомянутой обработкой и допускает использование иных известных методов обработки по оценке.
[0034]
Блок 13 вычисляет относительное расстояние DRw в направлении ширины заявленного транспортного средства между положением заявленного транспортного средства и положением объекта, находящегося поблизости от заявленного транспортного средства. Положение объекта, находящегося поблизости от заявленного транспортного средства, является тем, что оценивается блоком 12. Положение заявленного транспортного средства определяется, например, по сигналу GPS, принимаемому приемником 5 GPS. Вычислительная обработка относительного расстояния DRw выполняется, например, следующим образом. Во-первых, выполняют координатное преобразование по сигналу GPS в опорном кадре. Затем в этом опорном кадре вычисляют кратчайшее расстояние от продолжения продольной оси Afrov заявленного транспортного средства до координат положения объекта. Кратчайшее расстояние соответствует относительному расстоянию DRw. Относительное расстояние DRw рассчитывают для каждого объекта поблизости от заявленного транспортного средства. Тем не менее, вычислительную обработку относительного расстояния DRw не требуется выполнять для всех объектов поблизости от заявленного транспортного средства. То есть, вычислительная обработка может быть выполнена для объектов, находящихся на относительно небольшом расстоянии по прямой линии от заявленного транспортного средства. Вычислительная обработка может быть выполнена только для относительного расстояния DRwn между положением заявленного транспортного средства и положением движущегося объекта NFO, находящегося на кратчайшем расстоянии по прямой линии от заявленного транспортного средства (далее именуемый «ближайший движущийся объект NFOn» или просто «движущийся объект NFOn»).
[0035]
Блок 14 определяет, находится ли объект поблизости от заявленного транспортного средства на своей полосе OL или на расположенной рядом полосе AL. Блок 14 содержит блок 14a определения наличия в своей полосе и блок 14b определения наличия в расположенной рядом полосе. Блок 14a определяет, находится или нет объект на своей полосе OL. Если будет обнаружено, что объект не находится на своей полосе OL, блок 14b определяет, находится ли объект на расположенной рядом полосе AL.
[0036]
Обработка по определению в блоке 14a выполняется путем сравнения ширины Wolth определения для своей полосы (см. ниже) и относительного расстояния DRw. Если относительное расстояние DRw меньше ширины Wolth определения для своей полосы, то определяется, что объект с относительным расстоянием DRw находится на своей полосе OL. И наоборот, если относительное расстояние DRw больше ширины Wolth определения для своей полосы, то определяется, что объект с относительным расстоянием DRw не находится на своей полосе OL. Если относительное расстояние DRw больше ширины Wolth определения для своей полосы, обработка по определению выполняется блоком 14b на основании того же относительного расстояния DRw.
[0037]
Обработка по определению в блоке 14b выполняется путем сравнения ширины определения для расположенной рядом полосы Walth и относительного расстояния DRw (например, DRw > Wolth). Ширина Walth определения для расположенной рядом полосы является значением, полученным суммированием ширины Wal расположенной рядом полосы с шириной Wolth определения для своей полосы (то есть Walth = Wolth + Wal). Ширину Wal расположенной рядом полосы вычисляют на основании формы соседней полосы AL по данным блока11. Если относительное расстояние DRw меньше ширины Walth определения для расположенной рядом полосы, то определяется, что объект с относительным расстоянием DRw находится на расположенной рядом полосе AL. И наоборот, если относительное расстояние DRw больше ширины Walth определения для расположенной рядом полосы, то определяется, что объект с относительным расстоянием DRw не находится на расположенной рядом полосе AL. Таким образом, если относительное расстояние DRw больше ширины Walth определения для расположенной рядом полосы, то определяется, что объект с относительным расстоянием DRw находится на полосе, отличающейся от своей полосы OL и расположенной рядом полосы AL (например, в полосе, следующей за своей полосой OL).
[0038]
Следует отметить, что при обработке по определению блоком 14b можно использовать значение, полученное суммированием ширины Wol своей полосы к ширине Wolth определения для своей полосы (то есть Wolth + Wol) вместо использования ширины Walth определения для расположенной рядом полосы. Ширину Wol своей полосы вычисляют на основании формы своей полосы OL по данным блока 11. Это обусловлено тем, что ширина Wal расположенной рядом полосы и ширина Wol своей полосы в большинстве случаев одинаковы. Таким образом, обработка по определению в блоке 14a или 14b не должна выполняться для всех относительных расстояний DRw для всех объектов поблизости от заявленного транспортного средства. То есть обработка по определению может быть выполнена для относительных расстояний DRw некоторых объектов, находящихся на относительно небольшом расстоянии по прямой линии от заявленного транспортного средства. Обработка по определению может быть выполнена только для относительного расстояния DRwn.
[0039]
Блок 15 вычисляет относительную скорость VRt объекта в направлении движения заявленного транспортного средства. Относительную скорость VRt в направлении движения вычисляют, например, следующим образом. Сначала вычисляют несколько точек отражения электромагнитных волн, испускаемых радаром 3 миллиметрового диапазона, и отраженных от поверхности объекта. После этого задают положение репрезентативной точки объекта на основании этих точек отражения. Репрезентативной точкой считают, например, местоположение точки отражения на конце объекта или местоположение центра тяжести объекта. Затем, на основании репрезентативной точки, рассчитывают параметр относительного состояния, формируемый из относительного местоположения и относительного расстояния между заявленным транспортным средством и объектом. Относительную скорость VRt рассчитывают на основании изменения этого параметра относительного состояния в зависимости от времени. Необходимо отметить, что необязательно выполнять вычисление относительной скорости VRt всех объектов поблизости от заявленного транспортного средства. То есть вычисления относительной скорости VRt могут быть выполнены для объектов, находящихся на относительно небольшом расстоянии по прямой линии от заявленного транспортного средства. Вычисление относительной скорости VRt может выполняться только для ближайшего движущегося объекта NFOn. Таким образом, только относительная скорость VRtn ближайшего движущегося объекта NFOn может быть вычислена.
[0040]
Блок 16 устанавливает ширину Wolth определения для своей полосы, которая будет использоваться для обработки по определению в блоке 14. Ширина Wolth определения для своей полосы задается виртуально перед заявленным транспортным средством с целью определения существует или нет объект на своей полосе OL. Например, ширину Wolth определения для своей полосы устанавливают постепенно расширяющейся в направлении ширины полосы по мере удаления от заявленного транспортного средства. Как будет детально описано ниже, ширина Wolth определения для своей полосы изменяется (увеличивается или уменьшается) в направлении ширины полосы движения на основании относительной скорости VRtn, рассчитанной блоком 15. Если перед заявленным транспортным средством нет движущегося объекта NFO, ширину Wolth определения для своей полосы устанавливают на основании ширины Wol своей полосы. В этом случае, например, ширина Wolth определения для своей полосы в максимально приближенном к заявленному транспортному средству местоположении (например, у переднего бампера заявленного транспортного средства) имеет значение Wolth_0, по существу равное половине ширины Wol своей полосы (то есть Wolth_0 = Wol/2).
[0041]
Блок 17 вычисляет целевое ускорение (точнее, целевое замедление) TA заявленного транспортного средства в процессе управляемого замедления. Блок 17 имеет блок 17a расчета целевого ускорения в своей полосе и блок 17b расчета целевого ускорения в расположенной рядом полосе. Блок 17а вычисляет целевое ускорение TAol, когда ближайший движущийся объект NFOn находится на своей полосе OL. Блок 17b вычисляет целевое ускорение (точнее, целевое замедление) TAal, когда ближайший движущийся объект NFOn находится на расположенной рядом полосе AL.
[0042]
Вычислительная обработка целевого ускорения TAol в блоке 17a выполняется, например, следующим образом. Сначала рассчитывают относительное расстояние DRt в направлении движения заявленного транспортного средства между местоположением движущегося объекта NFOn и местоположением заявленного транспортного средства. После этого, на основании относительной скорости VRt движущегося объекта NFOn и относительного расстояния DRt рассчитывают прогнозируемое время TTC столкновения (то есть время до столкновения), под которым понимают период от текущего момента до момента столкновения заявленного транспортного средства с движущимся объектом NFOn (то есть оставшееся время до столкновения), используя следующее уравнение (1).
TTC=DRt/VRt (1)
[0043]
Далее, предполагая, что заявленное транспортное средство движется, сохраняя текущий режим движения, выполняется определение риска столкновения с движущимся объектом NFOn (далее «риск столкновения»). Определение риска столкновения выполняют путем сопоставления спрогнозированного времени TTC столкновения и параметра Tth1 столкновения. Если спрогнозированное время TTC столкновения меньше параметра Tth1 столкновения, риск столкновения определяется, как высокий. В противном случае риск столкновения определяется, как низкий. Если риск столкновения определен как высокий, устанавливают целевое ускорение TAol. Целевое ускорение TAol устанавливают на основании, например, относительной скорости VRt движущегося объекта NFOn, относительного расстояния DRt и градиента своей полосы OL. Если риск столкновения определен как низкий, целевое ускорение TAol не устанавливают. Или же целевое ускорение TAol устанавливают равным текущему целевому ускорению TAol. То есть поддерживается текущее целевое ускорение TAol.
[0044]
Вычислительная обработка целевого ускорения TAal в блоке 17b является, по существу, такой же, как обработка целевого ускорения TAol в блоке 17a. Однако, в этом случае для определения риска столкновения используют параметр Tth2 столкновения (например, Tth2 > Tth1), так как движущийся объект NFOn находится в соседней полосе Al. Если спрогнозированное время TTC столкновения меньше параметра Tth2 столкновения, риск столкновения определяется, как ставший высоким при условии, что движущийся объект NFOn вторгнется в свою полосу в ближайшее время. В противном случае риск столкновения определяется, как остающийся низким, даже если движущийся объект NFOn вторгнется в свою полосу OL в ближайшее время.
[0045]
Если риск столкновения определен, как ставший высоким, устанавливают целевое ускорение TAal. Целевое ускорение TAal устанавливают на основании, например, относительного расстояния DRt и градиента своей полосы OL, так что относительная скорость VRt движущегося объекта NFOn уменьшается до значения, равного или меньшего предварительно заданной относительной скорости VRc. Если риск столкновения определен как низкий, целевое ускорение TAal не устанавливают. Или же целевое ускорение TAal устанавливают на такое же значение, как текущее целевое ускорение TAal. То есть поддерживается текущее целевое ускорение TAal.
[0046]
2. Подробные сведения о блоке 16 установки ширины определения для полосы движения
2.1 Схема стандартного управляемого замедления
ФИГ. 2 представляет собой чертеж, для описания схемы стандартного управляемого замедления с использованием ширины Wolth определения для своей полосы. На ФИГ. 2 показаны три сопутствующих обстоятельства для заявленного транспортного средства 20, изменяющиеся с течением времени. Ширину Wolth определения для своей полосы устанавливают таким образом, чтобы она проходила в направлении ширины полосы от осевой линии CLol своей полосы OL. Осевую линию CLol вычисляют на основании формы своей полосы OL по оценке блоком 11. Диапазон, охватываемый двумя пунктирными линиями, показанными на ФИГ. 2, соответствует диапазону, определяемому, как своя полоса OL с шириной Wolth определения для своей полосы. Перед каждым транспортным средством, показанным на ФИГ. 2, изображена стрелка, длина которой увеличивается по мере увеличения скорости движения транспортного средства. То есть, в примере, показанном на ФИГ. 2, заявленное транспортное средство 20 движется со скоростью, превышающей скорость следующего впереди транспортного средства 21. Соотношение между длиной стрелки и скоростью движения установлено аналогично на других фигурах, отличающихся от ФИГ. 2.
[0047]
В ситуации, показанной в левой части ФИГ. 2, заявленное транспортное средство 20 обнаруживает, что следующее впереди транспортное средство 21 (то есть ближайший движущийся объект NFOn на этой фигуре) находится на своей полосе OL. Однако, в ситуации, показанной в левой части фигуры, дополнительно определено, что риск столкновения с находящимся впереди транспортным средством 21 является низким. Следовательно, управляемое замедление не будет выполняться. После этого, по мере сокращения относительного расстояния DRt, ситуация изменяется на изображенную в средней части ФИГ. 2. Ситуация, изображенная в средней части фигуры, соответствует ситуации, где определяется, что риск столкновения со следующим впереди транспортным средством 21 становится высоким. В такой ситуации выполняется управляемое замедление, и заявленное транспортное средство 20 замедляется. Выполнение управляемого замедления продолжается до тех пор, пока не будет определено, что риск столкновения со следующим впереди транспортным средством 21 снижается. Затем, по мере уменьшения относительной скорости VRt, ситуация изменяется на изображенную в правой части ФИГ. 2. Ситуация, изображенная в правой части фигуры, соответствует ситуации, где определено, что риск столкновения со следующим впереди транспортным средством 21 снижается. В такой ситуации выполнение управляемого замедления прекращается, и заявленное транспортное средство 20 перемещается с постоянной скоростью под управлением другой системы помощи водителю (например, системы круиз-контроля), которая выполняется вместо управляемого замедления.
[0048]
2.2 Проблемы стандартного управляемого замедления
ФИГ. 3 и 4 представляют собой чертежи, описывающие проблемы стандартного управляемого замедления. Аналогично ФИГ. 2, на ФИГ. 3 показаны три сопутствующих обстоятельства для заявленного транспортного средства 20, изменяющиеся с течением времени. Различие между ФИГ. 2 и ФИГ. 3 заключается в том, что следующее впереди транспортное средство 22 (то есть ближайший движущийся объект NFOn на этой фигуре), показанное на ФИГ. 3, находится в расположенной рядом полосе AL.
[0049]
В ситуации, показанной в левой части ФИГ. 3, заявленное транспортное средство 20 не обнаруживает, что следующее впереди транспортное средство 22 находится в своей полосе OL. Кроме того, в ситуации, показанной в левой части фигуры, риск столкновения со следующим впереди транспортным средством 21 только предполагается, и этот риск оценивается, как низкий. Таким образом, управляемое замедление не выполняется. Тем не менее, когда вторжение следующего впереди транспортного средства 22 в область, распознаваемую как своя полоса OL, возникает в сочетании с операцией смены полосы движения, ситуация изменяется на показанную в средней части ФИГ. 3. Ситуация, показанная в средней части фигуры, соответствует ситуации, где определено, что следующее впереди транспортное средство 22 находится на своей полосе OL и, тем самым, риск столкновения со следующим впереди транспортным средством 22 становится высоким. В такой ситуации, разумеется, управляемое замедление выполняется, однако резкое торможение заявленного транспортного средства 20 является неизбежным. После этого ситуация изменяется на показанную в правой части ФИГ. 3 в сочетании с завершением смены полосы движения следующего впереди транспортного средства 22. В такой ситуации, показанной в правой части фигуры, управляемое замедление выполняется непрерывно, поскольку относительное расстояние DRt все еще остается малым.
[0050]
Как было описано выше, когда следующее впереди транспортное средство 22 не принято во внимание, лицо, находящееся в заявленном транспортном средстве 20 получит дискомфортные ощущения при смене полосы движения следующим впереди транспортным средством 22. В связи с этим, если ширина Wolth определения для своей полосы расширяется в направлении ширины полосы, можно распознать находящееся впереди транспортное средство на расположенной рядом полосе AL. Однако, при расширении ширины Wolth определения для своей полосы возникает другая проблема. На ФИГ. 4 изображена схема, для описания проблемы, связанной с увеличением ширины Wolth определения для своей полосы. Аналогично ФИГ. 2, на ФИГ. 4 показаны три сопутствующих обстоятельства для заявленного транспортного средства 20, изменяющиеся с течением времени. Различие между ФИГ. 2 и ФИГ. 4 заключается в том, что следующее впереди транспортное средство 21 отсутствует на ФИГ. 4, ширина Wolth определения для своей полосы, показанная на ФИГ. 4, относительно велика, а следующее впереди транспортное средство 23 (то есть ближайший движущийся объект NFOn на этой фигуре), показанное на ФИГ. 4, движется быстрее заявленного транспортного средства 20.
[0051]
В ситуации, показанной в левой части ФИГ. 4, заявленное транспортное средство 20 не обнаруживает, что следующее впереди транспортное средство 23 находится на своей полосе OL. Таким образом, управляемое замедление не выполняется. Тем не менее, когда вторжение находящегося впереди транспортного средства 23 в область, распознаваемую как своя полоса OL, возникает, ситуация изменяется на показанную в правой части ФИГ. 4. Ситуация, показанная в правой части фигуры, соответствует ситуации, где определено, что риск столкновения со следующим впереди транспортным средством 23 является низким. В такой ситуации выполнение управляемого замедления прекращается, и заявленное транспортное средство 20 ускоряется под управлением другой системы помощи водителю (например, системы управляемого ускорения), которая выполняется вместо управляемого замедления.
[0052]
Как уже было описано, следующее впереди транспортное средство 23 перемещается быстрее, чем заявленное транспортное средство 20. Поэтому, даже если следующее впереди транспортное средство 23, показанное в средней части ФИГ. 4, вторгается в свою полосу OL в сочетании с операцией смены полосы движения, имеется малый риск столкновения со следующим впереди транспортным средством 23. Затем, если ширина Wolth определения для своей полосы просто увеличивается в направлении ширины полосы, будет выполнено ненужное замедление транспортного средства 20, что приведет к дискомфортным ощущениям для лица, находящегося в заявленном транспортном средстве 20.
[0053]
2.3 Развитие блока 2.3 установки ширины определения полосы движения
С учетом проблем, показанных на ФИГ. 3–4, блок 16 изменяет ширину Wolth определения для своей полосы в направлении ширины полосы движения на основании относительной скорости VRtn ближайшего движущегося объекта NFOn, рассчитанной блоком 15. ФИГ. 5–7 представляют собой чертежи для описания схемы модифицированной обработки ширины Wolth измерения для своей полосы при помощи блока 16.
[0054]
На ФИГ. 5 показан пример ширины Wolth определения для своей полосы, установленной при положительном знаке относительной скорости VRtn (то есть, VRtn > 0). В примере, показанном на ФИГ. 5, движущийся объект NFOn соответствует не следующему впереди транспортному средству 21, движущемуся в своей полосе OL, а следующему впереди транспортному средству 24, движущемуся в находящейся рядом полосе AL. Следовательно, относительная скорость VRtn движущегося объекта NFOn соответствует относительной скорости VRt следующего впереди транспортного средства 24. Знак относительной скорости VRtn положителен. Это обусловлено тем, что следующее впереди транспортное средство 24 движется быстрее заявленного транспортного средства 20.
[0055]
В примере, показанном на ФИГ. 5, поскольку знак относительной скорости VRtn является положительным, ширину Wolth определения для своей полосы устанавливают равной ширине Wolth_0, которая имеет место при отсутствии объекта перед заявленным транспортным средством. Когда ширина Wolth_0 установлена, считается, что следующее впереди транспортное средство 25 (то есть расстояние по прямой линии от заявленного транспортного средства является вторым кратчайшим путем до движущегося объекта NFO на этой фигуре) определяется, как находящееся на своей полосе OL. Поэтому, если определено, что риск столкновения со следующим впереди транспортным средством 25 является высоким, выполняется управляемое замедление для предотвращения столкновения со следующим впереди транспортным средством 25. Кроме того, в примере, показанном на ФИГ. 5, ширину Walth определения для находящейся рядом полосы устанавливают на значение, полученное суммированием ширины Wal находящейся рядом полосы с шириной Wolth_0 (то есть Walth = Wolth_0 + Wal). Поэтому, если определено, что риск столкновения со следующим впереди транспортным средством 24 возрастает, выполняется управляемое замедление для предотвращения столкновения со следующим впереди транспортным средством 24.
[0056]
На ФИГ. 6 показан пример ширины Wolth определения для своей полосы, установленной, когда знак относительной скорости VRtn является отрицательным (то есть, VRtn < 0). Аналогично примеру, показанному на ФИГ. 5, в примере, показанном на ФИГ. 6, следующее впереди транспортное средство 24, движущееся на находящейся рядом полосе AL, соответствует движущемуся объекту NFOn, а относительная скорость VRtn движущегося объекта NFOn соответствует относительной скорости VRt следующего впереди транспортного средства 24. Знак относительной скорости VRtn является отрицательным. Причиной этого является то, что следующее впереди транспортное средство 24 движется медленнее, чем заявленное транспортное средство 20.
[0057]
В примере, показанном на ФИГ. 6, поскольку знак относительной скорости VRtn является отрицательным, ширина Wolth определения для своей полосы увеличивается в направлении ширины полосы. Когда ширина Wolth определения для своей полосы увеличивается, следующие впереди транспортные средства 24 и 25 определяются, как находящиеся на своей полосе OL. Поэтому, если определено, что риск столкновения со следующим впереди транспортным средством 24 является высоким, выполняется управляемое замедление для предотвращения столкновения со следующим впереди транспортным средством 24. Кроме того, если определено, что риск столкновения со следующим впереди транспортным средством 25 является высоким, выполняется управляемое замедление для предотвращения столкновения со следующим впереди транспортным средством 25.
[0058]
На ФИГ. 7 показан пример ширины Wolth определения для своей полосы, установленной в случае, когда заявленное транспортное средство достигает конца затора на дороге. В примере, показанном на ФИГ. 7, конец затора на находящейся рядом полосе AL расположен ближе к боковой стороне заявленного транспортного средства, чем конец затора на своей полосе OL. Кроме того, следующее впереди транспортное средство 24 и следующее впереди транспортное средство 26 на находящейся рядом полосе AL остановились или движутся с чрезвычайно низкой скоростью, в то время как следующее впереди транспортное средство 25 на своей полосе движется с низкой скоростью.
[0059]
Модифицированная обработка ширины Wolth определения для своей полосы в примере, показанном на ФИГ. 7, по существу, не отличается от примера, показанного на ФИГ. 6. То есть, знак относительной скорости VRtn следующего впереди транспортного средства 24 является отрицательным и ширина Wolth определения для своей полосы увеличивается в направлении ширины полосы. Однако, в примере, показанном на ФИГ. 7, абсолютное значение относительной скорости VRtn больше, чем в примере, показанном на ФИГ. 6. Следовательно, ширина Wolth определения для своей полосы, показанная на ФИГ. 7, увеличена в направлении ширины полосы движения больше, по сравнению с примером, показанном на ФИГ. 6.
[0060]
На ФИГ. 8 изображен график, показывающий пример соотношения между относительной скоростью VRtn движущегося объекта NFOn и шириной Wolth определения для собственной полосы, которое используется для модифицированной обработки ширины Wolth определения для своей полосы. Как показано на фиг. 8, если знак относительной скорости VRtn положительный или относительная скорость VRtn равна нулю, ширину Wolth определения для своей полосы устанавливают равной постоянному значению (то есть Wolth_0). Если знак VRtn отрицательный, ширину Wolth определения для своей полосы устанавливают на большее значение по мере увеличения абсолютного значения относительной скорости VRtn. Причиной этого является то, что риск столкновения возрастает по мере увеличения абсолютной величины отрицательной относительной скорости VRtn.
[0061]
3. Эффект первого варианта осуществления
В соответствии с устройством управления транспортным средством в первом варианте осуществления, описанном выше, определяется, на какой полосе находится ближайший движущийся объект NFDn, за счет использования ширины Wolth определения для своей полосы, которая устанавливается изменяющейся в зависимости от относительной скорости VRt. Поэтому, если определено, что движущийся объект NFDn находится на своей полосе OL, можно выполнять стандартное управляемое замедление. Даже если будет обнаружено, что движущийся объект NFDn находится на расположенной рядом полосе AL, можно выполнять управляемое замедление, учитывая вероятность вторжения движущегося объекта NFDn на свою полосу OL в ближайшее время.
[0062]
В частности, ситуация, описанная на фиг. 7, предполагается, когда заявленное транспортное средство достигает конца затора во время движения по шоссе. Если ширина Wolth определения для своей полосы не изменяется, заявленное транспортное средство 20, показанное на ФИГ. 7, может догнать следующие впереди транспортные средства 24 и 26 на расположенной рядом полосе AL на высокой скорости. В данном случае следующие впереди транспортные средства 24 и 26 остановились или движутся с чрезвычайно низкой скоростью. Таким образом, когда заявленное транспортное средство 20 обгоняет следующие впереди транспортные средства 24 и 26 на высокой скорости, это может вызвать чувство беспокойства у лица, находящегося в заявленном транспортном средства, кто предполагает внезапное перемещение этих транспортных средств на свою полосу. В связи с этим, согласно первому варианту осуществления, устройство управления транспортным средством рассматривает следующее впереди транспортное средство 24 как движущийся объект NFDn с выполнением управляемого замедления, предполагая, соответственно, изменение полосы движения следующим впереди транспортным средством 24 в ближайшее время. Следовательно, возможно для заявленного транспортного средства 20 в умеренно замедленном состоянии достичь конца затора движения в своей полосе OL, не вызывая беспокойных ощущений у лица, находящегося в заявленном транспортном средстве 20.
[0063]
В первом варианте осуществления, описанном выше, прибор LIDER 2 или радар 3 миллиметрового диапазона, показанный на ФИГ. 1, соответствует «устройству распознавания движущихся объектов» согласно первому аспекту. ЭБУ 10, показанный на ФИГ. 1, соответствует «блоку управления» согласно первому аспекту.
[0064]
Второй вариант осуществления
Ниже будет раскрыт второй вариант осуществления настоящего изобретения со ссылкой на ФИГ. 9–12.
Следует отметить, что конфигурация, общая с первым вариантом осуществления, и ее описание будут опущены.
[0065]
1. Конфигурация системы автоматического привода
ФИГ. 9 представляет собой схему, демонстрирующую конфигурацию системы автоматического привода, для которой использовано устройство управления транспортным средством согласно второму варианту осуществления. Система 30 автоматического привода, показанная на ФИГ. 9, содержит ЭБУ 31. Подобно ЭБУ 10, показанному на ФИГ. 1, ЭБУ 31 представляет собой электронный блок управления, содержащий, по меньшей мере, один центральный процессор (ЦП), по меньшей мере, одно постоянное запоминающее устройство (ПЗУ) и, по меньшей мере, одно оперативное запоминающее устройство (ОЗУ).
[0066]
На ФИГ. 9 среди функций помощи при управлении движением, выполняемых ЭБУ 31, в виде блоков представлены функции, относящиеся к распознаванию объектов и управляемому замедлению. Другие функции помощи при управлении движением, которыми обладает ЭБУ 31, не показаны. ЭБУ 31 имеет функцию, связанную с распознаванием объектов, блок 32 вычисления относительной скорости, блок 33 вычисления угла, блок 34 установки поправочных коэффициентов и блок 35 задания ширины определения полосы в дополнение к блокам 11, 12, 13, 14, 17, общим для ФИГ. 1. Эти блоки 32, 33, 34 и 35 реализованы не в виде аппаратных средств в составе ЭБУ 31, а в виде программного обеспечения, когда сохраненная в ПЗУ программа выполняется ЦП.
[0067]
Подобно блоку 15, показанному на ФИГ. 1, блок 32 рассчитывает относительную скорость VRt. Помимо относительной скорости VRt, блок 32 также вычисляет относительную скорость VRw в направлении ширины транспортного средства для заявленного транспортного средства. Относительную скорость VRt и относительную скорость VRw рассчитывают на основании изменения этой величины относительного состояния в зависимости от времени, как описано выше. Следует помнить, что вычисление относительной скорости VRt и относительной скорости VRw необязательно выполняется для всех объектов вблизи от заявленного транспортного средства. То есть вычисления относительной скорости VRt и относительной скорости VRw могут выполняться для объектов, находящихся на относительно небольшом расстоянии по прямой линии от заявленного транспортного средства. Вычисление относительной скорости VRt и относительной скорости VRw может быть выполнено только для ближайшего движущегося объекта NFOn. Таким образом, только относительная скорость VRwn ближайшего движущегося объекта NFOn и относительная скорость VRtn может быть вычислена.
[0068]
Блок 33 вычисляет угол θn между продолжением продольной оси Afrn ближайшего движущегося объекта NFOn и осевой линией CLol. На ФИГ. 10 представлен вид, иллюстрирующий угол θn. На ФИГ. 10 следующее впереди транспортное средство 27, находящееся на расположенной рядом полосе AL, показано, как ближайший движущийся объект NFOn. Угол θn вычисляют как угол между линией продолжения продольной оси Afrn следующего впереди транспортного средства 27 и осевой линией CLol. Учитывая относительное направление движущегося объекта NFOn, знак угла θn устанавливают при задании осевой линии CLol в качестве начальной линии (то есть угол θn на осевой линии CLol равен 0°). В частности, на ФИГ. 10, так как относительное направление следующего впереди транспортного средства 27 находится справа от заявленного транспортного средства 20, принимается, что поворот линии продолжения против часовой стрелки считается положительным углом, в то время как поворот линии продолжения по часовой стрелке считается отрицательным углом. Полагая, что относительное направление следующего впереди транспортного средства 27 находится слева от заявленного транспортного средства 20, принимается, что поворот линии продолжения против часовой стрелки считается отрицательным углом, в то время как поворот линии продолжения по часовой стрелке считается положительным углом.
[0069]
Блок 34 устанавливает, по меньшей мере, один из поправочных коэффициентов CC_1 и CC_2 для коррекции ширины Wolth определения для своей полосы. На ФИГ. 11 изображен график, показывающий пример зависимости между относительной скоростью VRwn и поправочным коэффициентом CC_1. Как показано на фиг. 11, если знак относительной скорости VRwn является положительным или равен нулю, поправочный коэффициент CC_1 будет иметь постоянное значение (то есть CC_1 = 1,0). Если знак относительной скорости VRwn является отрицательным, поправочный коэффициент CC_1 представлен большим значением при возрастании абсолютного значения относительной скорости VRwn. Это обусловлено тем, что если движущийся объект NFOn находится на расположенной рядом полосе AL, риск столкновения становится выше по мере увеличения абсолютного значения отрицательной относительной скорости VRwn.
[0070]
На ФИГ. 12 изображена диаграмма, показывающая пример зависимости между углом θn и поправочным коэффициентом CC_2. Как показано на фиг. 12, если угол θn находится в диапазоне от -180° до 0°, поправочный коэффициент CC_2 будет иметь постоянное значение (то есть CC_12 = 1,0). Если угол θn находится в диапазоне от 0° до 90°, поправочный коэффициент CC_2 представлен большим значением по мере увеличения угла θn. Это обусловлено тем, что если движущийся объект NFOn находится на расположенной рядом полосе AL, риск столкновения становится выше с увеличением угла θn. Кроме того, если угол θn находится в диапазоне от 90° до 180°, поправочный коэффициент CC_2 представлен большим значением по мере увеличения угла θn. Это обусловлено тем, что если угол θn больше 90°, движущийся объект NFOn направляется в сторону заявленного транспортного средства, и риск столкновения резко возрастает.
[0071]
Блок 35 изменяет ширину Wolth определения для своей полосы на основании относительной скорости VRtn аналогично блоку 16, показанному на Фиг. 1. 1. Блок 35 дополнительно корректирует измененную ширину Wolth определения для своей полосы, используя, по меньшей мере, либо относительную скорость VRwn, либо угол θn.
[0072]
2. Результат второго варианта осуществления
Для устройства управления транспортным средством согласно описанному выше второму варианту осуществления, ширина Wolth определения для своей полосы корректируется, используя, по меньшей мере, либо относительную скорость VRwn, либо угол θn. Таким образом, можно повысить точность определения того, на какой полосе находится движущийся объект NFDn.
[0073]
В описанном выше втором варианте осуществления поправочный коэффициент CC_1 соответствует «первому поправочному коэффициенту» третьего аспекта изобретения, а поправочный коэффициент CC_2 соответствует «второму поправочному коэффициенту» четвертого аспекта изобретения.
[0074]
Другие варианты осуществления
Устройство управления транспортным средством в соответствии с любым из описанных выше вариантов осуществления может быть модифицировано следующим образом.
[0075]
В первом варианте осуществления, упомянутом выше, ширина Wolth определения для своей полосы была установлена с линейным расширением в направлении ширины полосы по мере удаления от заявленного транспортного средства. Тем не менее, ширина Wolth определения для своей полосы может быть установлена на увеличение экспоненциально в направлении ширины полосы по мере удаления от заявленного транспортного средства. ФИГ. 13 представляет собой чертеж для описания схемы модифицированной обработки блоком 16 задания ширины определения, в котором используется другая ширина Wolth определения для своей полосы. Так же, как и в примере, показанном на ФИГ. 6, в примере, показанном на ФИГ. 13, следующее впереди транспортное средство 24, движущееся в расположенной рядом полосе AL, соответствует движущемуся объекту NFOn, а относительная скорость VRtn движущегося объекта NFOn соответствует относительной скорости VRt следующего впереди транспортного средства 24.
[0076]
Как показано на фиг. 13, знак относительной скорости VRtn является отрицательным. Таким образом, в примере, показанном на ФИГ. 13, ширина Wolth определения для своей полосы увеличивается в направлении ширины полосы. В соответствии с этой шириной Wolth определения для своей полосы следующие впереди транспортные средства 24 и 25 распознаются, как находящиеся на своей полосе OL. Поэтому, если определено, что риск столкновения со следующим впереди транспортным средством 24 является высоким, выполняется управляемое замедление для предотвращения столкновения с находящимся впереди транспортным средством 24. Кроме того, если определено, что риск столкновения со следующим впереди транспортным средством 25 является высоким, выполняется управляемое замедление для предотвращения столкновения со следующим впереди транспортным средством 25.
[0077]
В описанном выше первом варианте осуществления при модифицированной обработке блоком 16, когда ширина Wolth определения для своей полосы увеличивается в направлении ширины полосы, темп расширения был фиксированным. Тем не менее, темп такого расширения не обязательно должен быть постоянным. Например, темп расширения может увеличиваться последовательно, начиная с положения, расположенного ближе к заявленному транспортному средству. ФИГ. 14 представляет собой чертеж для описания схемы модифицированной обработки блоком 16, в котором используется другая ширина Wolth определения для своей полосы. Так же, как и в примере, показанном на ФИГ. 6, в примере, показанном на ФИГ. 14, следующее впереди транспортное средство 24, движущееся на расположенной рядом полосе AL, соответствует движущемуся объекту NFOn, а относительная скорость VRtn движущегося объекта NFOn соответствует относительной скорости VRt следующего впереди транспортного средства 24.
[0078]
Как показано на фиг. 14, знак относительной скорости VRtn является отрицательным. Таким образом, в примере, показанном на ФИГ. 14, ширина Wolth определения для своей полосы увеличивается в направлении ширины полосы. Однако, темп расширения устанавливается на низкое значение в месте, примыкающем к заявленному транспортному средству 20, тогда как устанавливается на относительно высокое значение в месте, удаленном от заявленного транспортного средства 20. Даже в таком случае распознается, что следующие впереди транспортные средства 24 и 25 находятся на своей полосе OL. Поэтому, если определено, что риск столкновения со следующим впереди транспортным средством 24 является высоким, выполняют управляемое замедление для предотвращения столкновения со следующим впереди транспортным средством 24. Кроме того, если определено, что риск столкновения со следующим впереди транспортным средством 25 является высоким, выполняют управляемое замедление для предотвращения столкновения со следующим впереди транспортным средством 25.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ | 2016 |
|
RU2654839C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ, ДВИЖУЩИХСЯ ДРУГ ЗА ДРУГОМ ПО ОДНОЙ ПОЛОСЕ | 2023 |
|
RU2822940C1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2729856C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2014 |
|
RU2665208C2 |
| СИСТЕМА ПОДДЕРЖКИ РУЛЕВОГО УПРАВЛЕНИЯ | 2018 |
|
RU2685108C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2020 |
|
RU2740820C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 2014 |
|
RU2657656C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СТОП-ЛИНИИ И СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2020 |
|
RU2745936C1 |

Устройство управления транспортным средством содержит устройство обнаружения движущегося объекта и блок управления, выполненный с возможностью замедления транспортного средства на основе результата обнаружения объекта. Кроме того, блок управления выполнен с возможностью вычисления относительного расстояния в направлении ширины транспортного средства между основным транспортным средством и движущимся объектом. Также блок управления выполнен с возможностью определять необходимость замедления путем сравнения относительного расстояния и ширины определения для установления своей полосы. Ширина определения для своей полосы устанавливается на основании относительной скорости движущегося объекта в направлении движения основного транспортного средства. Обеспечивается предотвращение столкновения основного транспортного средства с ближайшим, следующим впереди, транспортным средством даже в том случае, когда трудно различить полосу, по которой движется ближайшее, следующее впереди, транспортное средство. 5 з.п. ф-лы, 14 ил.
1. Устройство управления транспортным средством, содержащее:
устройство обнаружения движущегося объекта, выполненное с возможностью обнаружения движущегося объекта впереди заявленного транспортного средства; и
блок управления, выполненный с возможностью осуществления управляемого замедления заявленного транспортного средства на основании результата обнаружения движущегося объекта,
в котором упомянутый блок управления дополнительно выполнен с возможностью осуществлять:
вычисление относительного расстояния в направлении ширины транспортного средства для заявленного транспортного средства между заявленным транспортным средством и движущимся объектом, ближайшим к заявленному транспортному средству из всех движущихся объектов; и
определение, необходимо или нет выполнять управляемое замедление, путем сопоставления относительного расстояния и ширины определения для установления своей полосы, по которой движется заявленное транспортное средство, причем ширина определения для своей полосы устанавливается на основании относительной скорости ближайшего движущегося объекта в направлении движения заявленного транспортного средства.
2. Устройство управления транспортным средством по п. 1,
в котором упомянутый блок управления дополнительно выполнен с возможностью переменно устанавливать ширину определения для своей полосы,
причем упомянутый блок управления выполнен с возможностью, когда знак относительной скорости ближайшего движущегося объекта в направлении движения заявленного транспортного средства является отрицательным, устанавливать ширину определения для своей полосы на расширение ширины по мере увеличения абсолютного значения относительной скорости ближайшего движущегося объекта в направлении движения заявленного транспортного средства.
3. Устройство управления транспортным средством по п. 1,
в котором упомянутый блок управления дополнительно выполнен с возможностью устанавливать первый поправочный коэффициент для коррекции ширины определения для своей полосы,
причем упомянутый блок управления выполнен с возможностью, когда знак относительной скорости ближайшего движущегося объекта в направлении ширины транспортного средства для заявленного транспортного средства является отрицательным, устанавливать первый поправочный коэффициент на большее значение по мере увеличения абсолютного значения относительной скорости в направлении ширины транспортного средства.
4. Устройство управления транспортным средством по п. 1,
в котором упомянутый блок управления дополнительно выполнен с возможностью устанавливать второй поправочный коэффициент для коррекции ширины определения для своей полосы,
причем упомянутый блок управления выполнен с возможностью, когда угол между продольной осью ближайшего движущегося объекта и осевой линией своей полосы находится в пределах предварительно заданного диапазона, устанавливать второй поправочный коэффициент на большее значение по мере увеличения упомянутого угла.
5. Устройство управления транспортным средством по п. 1,
в котором упомянутый блок управления дополнительно выполнен с возможностью осуществлять:
определение, находится или нет ближайший движущийся объект на своей полосе, на основании сопоставления между шириной определения для своей полосы и относительным расстоянием; а также
выполнение первого управляемого замедления заявленного транспортного средства, когда определено, что ближайший движущийся объект находится на своей полосе,
причем первое управляемое замедление выполняется на основании относительной скорости ближайшего движущегося объекта, который определен как находящийся на своей полосе, в направлении движения заявленного транспортного средства.
6. Устройство управления транспортным средством по п. 1,
в котором упомянутый блок управления дополнительно выполнен с возможностью осуществлять:
определение, находится или нет ближайший движущийся объект на расположенной рядом полосе, на основании сопоставления ширины определения для расположенной рядом полосы и относительного расстояния, причем ширина определения для расположенной рядом полосы устанавливается путем суммирования ширины расположенной рядом полосы и ширины определения для своей полосы; а также
выполнение второго управляемого замедления заявленного транспортного средства, если определено, что ближайший движущийся объект находится на расположенной рядом полосе,
причем упомянутое второе управляемое замедление выполняется на основании относительной скорости ближайшего движущегося объекта, который определен как находящийся на расположенной рядом полосе, в направлении движения заявленного транспортного средства.
| US 20060136132 A1, 22.06.2006 | |||
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ | 2012 |
|
RU2605812C2 |
| WO 2016051460 A1, 07.04.2016 | |||
| Самолет | 1929 |
|
SU17016A1 |

