Данное изобретение относится к многодвигательным электроприводам, содержащим по крайней мере два электродвигателя, в частности к электроприводам механизма подъема и опускания груза грузоподъемного крана грузовой двухдвигательной лебедкой башенного крана с двумя электродвигателями, один из которых является вспомогательным.
В практике широко известны приводы механизмов подъема и опускания груза грузоподъемных кранов, используемые в крановых электроприводах с динамическим торможением самовозбуждением электродвигателей с фазным ротором. Эти электроприводы имеют сравнительно сложную диаграмму замыкания контактов командоконтроллера, что приводит к необходимости использования громоздкого командоконтроллера, увеличения числа контактов и проводов, исключает возможность использования малогабаритных командоконтроллеров, имеющих более простую конструкцию, и широко распространенную симметричную диаграмму замыкания контактов командоконтроллера.
Из патентной документации Великобритании известен электропривод подъема и опускания груза грузоподъемного крана, в котором электродвигатель начинает опускать груз после замыкания переключателя, при этом заданная скорость спуска груза определяется напряжением, снимаемым с клемм, причем реле привода при его включении замыкает соответствующие контакты, срабатывает контактор привода, фазовая схема блока управления включает управляемые вентили и запускает электродвигатель, создавая полный момент на его валу. По мере ускорения электродвигателя напряжение, снимаемое с тахогенератора, возрастает и вычитается из заданного напряжения таким образом, что напряжение, поступающее в блок управления, уменьшается, блок управления задерживает запускающие импульсы, подаваемые на управляемые вентили, напряжение на статоре электродвигателя уменьшается. Если момент, создаваемый грузом, превышает момент, создаваемый электродвигателем, то сигнал рассогласования меняет знак, один контактор привода замыкается, а другой контактор привода размыкается. При этом блок управления увеличивает напряжение на статоре электродвигателя и создает тормозной момент [1].
В другом известном техническом решении США известен электропривод лебедки подъема и спуска подъемника, который содержит систему управления индукционным электродвигателем, скорость которого регулируется в широком диапазоне от нуля до максимальной скорости в режиме полной нагрузки, как в режиме спуска, так и в режиме подъема, причем система управления электроприводом обеспечивает автоматическое изменение скорости вращения электродвигателя в режиме спуска в зависимости от веса нагрузки. Скорость свободного падения относительно легкой нагрузки может составлять до 275% от синхронной скорости электродвигателя, а в случае тяжелой нагрузки скорость спуска замедляется и ограничивается на уровне синхронной скорости. Этот электропривод содержит электродвигатель с фазным ротором, механический тормоз привода, выпрямитель тормоза, первичную и вторичную цепи электродвигателя, электромагнитный тормоз нагрузки, резисторные цепи [2].
Известен электропривод механизма подъема крана, содержащий асинхронный электродвигатель с фазным ротором, обмотка статора которого через ключи направления вращения подключена к источнику переменного напряжения, пускотормозной резистор, включенный в цепь обмотки ротора, и асинхронный двухскоростной короткозамкнутый электродвигатель, в цепи обмоток статора которого включены ключи большой и малой скоростей, причем электропривод снабжен тиристорным коммутатором, вход которого связан с пускотормозными резисторами, а управляющие электроды тиристоров через распределитель импульсов и пороговый элемент связаны с цепью обмотки ротора и нагрузочным резистором, подключенным к выходу коммутатора, при этом обмотки статора двухскоростного электродвигателя через указанные ключи большой и малой скоростей соединены с обмоткой статора электродвигателя с фазным ротором [3].
По сущности и достигаемому техническому результату наиболее близким техническим решением к данному изобретению является электропривод механизма подъема, содержащий два асинхронных электродвигателя с короткозамкнутым ротором, два силовых и два реверсивных контактора с катушкой и тремя силовыми контактами каждый, одни выводы которых попарно объединены и присоединены к соответствующим выводам обмоток электродвигателей, другие выводы силовых контактов пофазно объединены и подключены к одним выводам параллельно включенных трехфазных автоматических переключателей, при этом привод содержит силовые и реверсивные контакторы с катушками и силовыми контактами, блок переключений, шаговый искатель, реле управления с катушкой, реле выбора направления вращения с катушкой, реле времени паузы с катушкой, реле времени работы к катушкой, ключи и контакты, состоянием которых определяется программа работы электропривода, при этом разнообразие программ обеспечивает возможность расширения области применения двухдвигательного привода [4].
Общими признаками известного электропривода [4] и электропривода согласно данному изобретению является то, что электроприводы содержат электродвигатели, средства управления приводом с цепями подъема, спуска и переключения ступеней скорости электродвигателя, блок управления упомянутыми электродвигателями, включающий цепи с контакторами торможения, подъема и спуска груза, контакторы переключения ступеней скорости, контакторы скоростей подъема и спуска груза, контактор торможения, командоконтроллер, резисторы, кнопки управления, диоды, выпрямитель, блок переключений, реле управления, реле времени.
Известное наиболее близкое техническое решение [4] не отвечает условиям его применения в конструкции электропривода двухдвигательной грузовой лебедки грузоподъемного крана, валы двигателей которого соединены между собой.
Решаемой и достигаемой технической задачей данного изобретения является повышение удобства управления за счет обеспечения возможности автоматического выбора электроприводом зависимости скорости от нагрузки на крюке крана или массы груза при его спуске, а также упрощение конструкции за счет обеспечения возможности использования в устройстве более компактных и простых командоаппаратов, позволяющих при этом уменьшить число проводов и контактов устройства. Другой решаемой технической задачей данного изобретения является уменьшение износа электропривода, повышение его ресурса и надежности, что достигается благодаря автоматическому выбору электроприводом скорости подъема и опускания груза в зависимости от нагрузки на крюке крана.
Поставленная техническая задача решается тем, что электропривод механизма подъема и опускания груза грузоподъемного крана содержит основной электродвигатель с фазным ротором, вспомогательный двухскоростной электродвигатель, установленный на валу основного электродвигателя, электродвигатели гидротолкателей тормоза, командоконтроллер управления с цепями подъема, спуска и переключения ступеней скорости основного электродвигателя, блок управления упомянутыми электродвигателями, включающий цепи с контакторами торможения, подъема и спуска груза, сетевой контактор и контакторы переключения ступеней скорости, контакторы малой и большой скоростей подъема и спуска груза, контактор динамического торможения, при этом командоконтроллер управления и блок управления электродвигателями соединены упомянутыми цепями с источником подпитки, а статорные обмотки электродвигателя гидротолкателей тормоза через контакты 1КМ3 подключены к одноименным фазам основного электродвигателя, которые через контакты 1А3, 1В3, 1С3 и контакты 1С2, один из которых шунтирован контактами 1КМ1 и 1КМ2, подключены к питающей сети, обмотки высокой и низкой скоростей вспомогательного электродвигателя подключены соответственно через контакты 1КМ12 и 1КМ11 к одноименным фазам статорной обмотки основного электродвигателя, причем электропривод имеет трехфазный мостовой выпрямитель, основные и дополнительный резисторы, первые выводы основных резисторов соединены с фазными выводами обмотки ротора основного электродвигателя, первые выводы дополнительных резисторов соединены между собой, а вторые их выводы подключены к выводам переменного тока трехфазного мостового выпрямителя, а также блок резисторов, составленный из трех групп резисторов, причем первые выводы резисторов каждой группы соединены со вторым выводом резистора соответствующей фазы обмотки ротора основного электродвигателя, который через контакт 1КМ10 соединен со вторым выводом резистора соответствующей группы блока резисторов, подключенного ко вторым выводам двух других резисторов этой группы через контакты 1КМ9 и 1КМ8 соответственно и подключенного к соответствующему выводу трехфазного мостового выпрямителя переменного тока, при этом группы резисторов упомянутого блока резисторов соединены между собой вторыми выводами резисторов через контакты 1КМ7, катодный вывод трехфазного мостового выпрямителя соединен с электроприводом через реле максимального тока 1КА1, диод динамического торможения, резистор 1R и первый контакт 1КМ5 соединены с первой фазой статорной обмотки основного электродвигателя, третья фаза которого через контакт 1КМ5 соединена с анодным выводом трехфазного мостового выпрямителя, причем реле минимального тока 1КА2 через второй диод динамического торможения и контакты 1КМ6 подключено к первой и третей фазам основного электродвигателя.
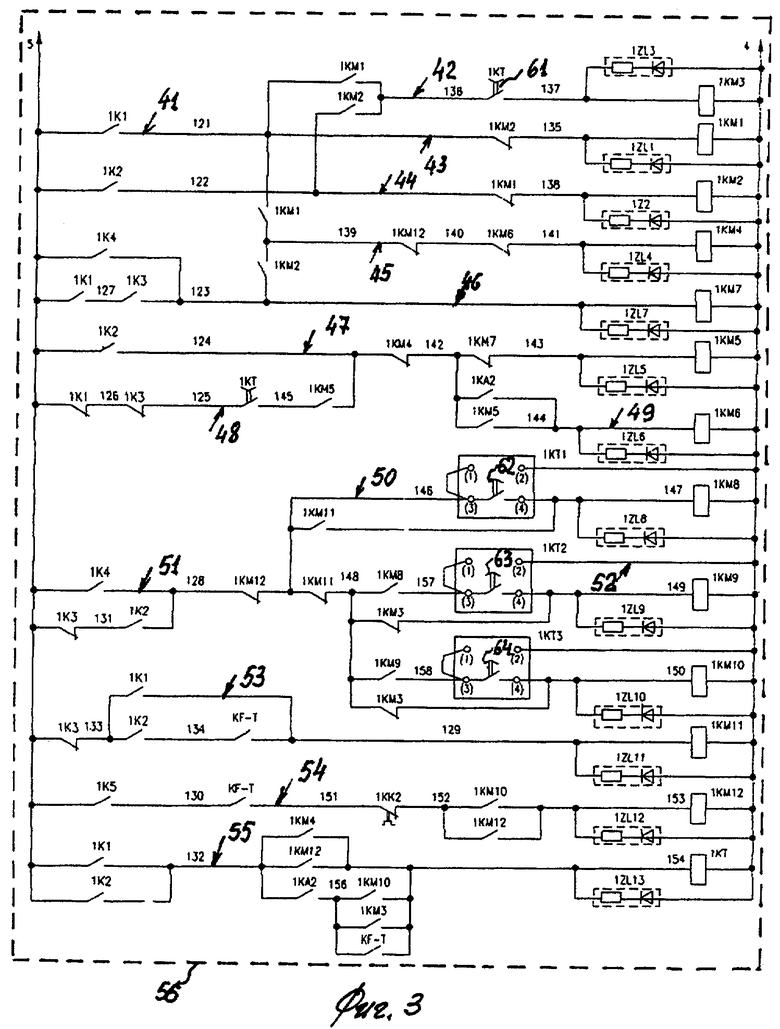
На фиг.1 показан электропривод механизма подъема и опускания груза грузоподъемного крана на примере электропривода башенного крана.
На фиг.2 - диаграмма включения электрических цепей электропривода по позициям командоконтроллера.
На фиг.3 - рабочая схема электропривода.
На фиг.4 - таблица контакторов, расположенных перед соответствующими им электрическими цепями электропривода.
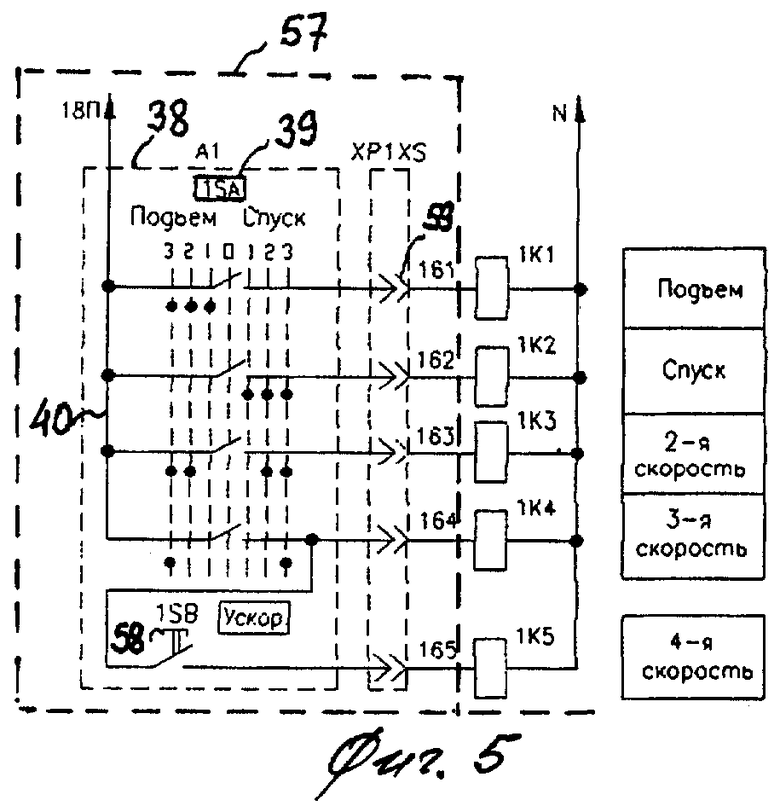
На фиг.5 - диаграмма замыкания контактов командоконтроллера электропривода.
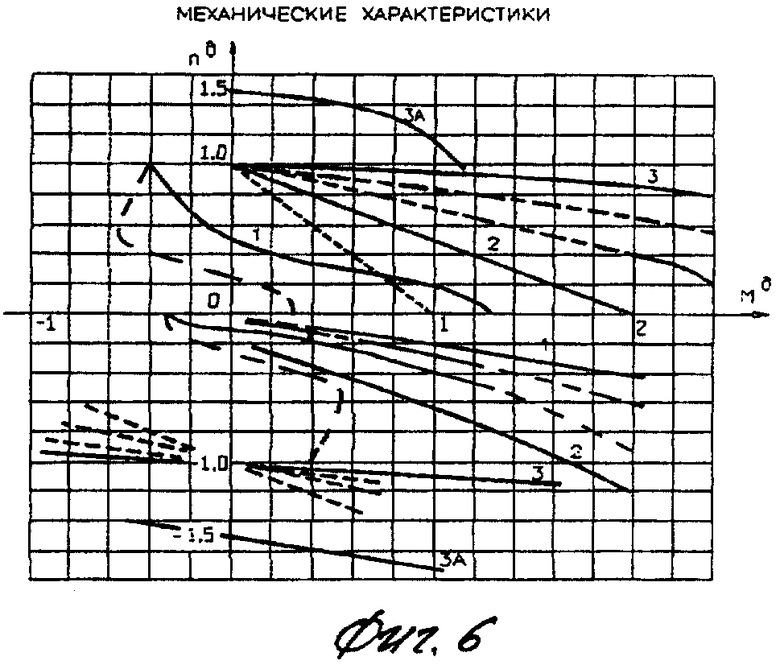
На фиг.6 - механические характеристики электропривода.
Электропривод механизма подъема и опускания груза грузоподъемного крана, на примере электропривода грузовой лебедкой башенного крана, содержит основной электродвигатель 1 (фиг.1) с фазным ротором, вспомогательный двухскоростной электродвигатель 2, при этом последний установлен на одном валу с основным электродвигателем 1, а также электродвигатель 3 привода гидротолкателей тормоза грузовой лебедки.
Электропривод содержит также электрически взаимосвязанные между собой диод 4 для тока динамического торможения, контактор 5 большой скорости, два реле 6, одно из которых, верхнее на схеме, является выходным реле максимального тока, воздействующим на ограничитель грузоподъемности крана (ограничитель не показан), а другое реле 6, нижнее на схеме, является реле минимального тока. Контакт реле 6 минимального тока замыкается, если масса груза на крюке крана не превышает определенного значения.
Электропривод содержит резисторы 7-19, диоды 20-25, при этом резисторы 10-18 образуют собой упомянутый ниже блок 26 резисторов, а резисторы 19 и диоды 20-25 образуют собой выпрямительный мост 27. Между блоком 26 резисторов и выпрямительным мостом 27 установлено соединенное с ними реле 28 контроля упомянутых диодов.
Диод 4 для тока динамического торможения, контактор 5 большой скорости, реле 6 минимального тока, контакторы 29-32, блок 33 времени наработки электропривода или счетчик моточасов и другие элементы, в частности резистор 34 или 1R, резистор 35 или 1R3 и нормально закрытый контактор 36 или 1КМ3 устройства, входят в состав цепи или блока 37 коммутации цепей электродвигателей 1 и 2 электропривода.
На фиг.5 условно показаны командоаппарат 38, кнопка 39 или 1SA, встроенная в рукоятку командоаппарата 38, и командоконтроллер 40. На фиг.3 показаны электрические цепи 41-55 с их элементами, которые условно показаны буквенно-цифровыми обозначениями и упомянуты в описании работы устройства. Цепи 41-55 образуют управляющий блок 56 устройства.
Командоаппарат 38 с кнопкой 39 и командоконтроллер 40 образуют собой блок 57 управления работой электропривода грузовой лебедки крана.
Электродвигатель 2 имеет обмотку 24С1-24С3 малой скорости и обмотку 4С1-4С3 большой скорости. Блок управления 57 имеет кроме того вторую кнопку 58 ускорения 1SB, показанную на фиг.5, которая служит для ускорения вращения вала электродвигателя 1.
Таким образом, электропривод содержит электрически соединенные между собой блок 26 резисторов (фиг.1), блок 27 диодов, блок 37 коммутации цепей электродвигателей, управляющий блок 56 (фиг.3) и блок управления 57 (фиг.5). Блок управления соединен с управляющим блоком электрическими разъемами 59 (фиг.5). Блок 37 коммутации соединен с электродвигателями устройства, а блок 27 диодов соединен с блоком 26 резисторов. На фиг.1 позицией 60 показан условно вал основного электродвигателя 1, на котором установлен вспомогательный электродвигатель 2. На фиг.3 позициями 61-64 показаны реле времени 1КТ, 1КТ1-1КТ3.
Работает электропривод следующим образом.
Схемы и условия работы.
Когда привод подъема груза работает на подъем, то тихоходная обмотка электродвигателя 2 подключена к питанию совместно с основным электродвигателем 1 в направлении подъема груза на первой позиции командоаппарата, что обеспечивает задаваемую жесткую механическую характеристику (1) работы привода, которая показана на фиг.6.
Когда привод подъема и опускания груза работает на спуск груза, то тихоходная обмотка электродвигателя 2 подключается к питанию на одной из заданных позиций командоаппарата совместно с основным электродвигателем 1, работающим в режиме динамического торможения самовозбуждением, что обеспечивает получение силового спуска груза на малой скорости, соответствующего характеристике (2) работы привода, которая показана на фиг.6. Поскольку устройство управления электроприводом имеет четыре ступени скорости лебедки на подъем груза и пять ступеней скорости в направлении спуска груза, а применяемый командоаппарат имеет по три положения в направлении подъема и спуска, то для включения четырех ступеней скорости подъема и пяти ступеней скорости спуска в данном устройстве применена кнопка управления, встроенная в рукоятку командоаппарата. Для исключения возможности подъема тяжелых грузов на повышенной скорости последовательно с упомянутой кнопкой управления в цепь катушки контактора большой скорости 1КМ12 включен контакт KF-T реле ограничителя грузоподъемности, который замыкается, если масса груза на крюке башенного крана не превышает определенного значения.
В случае подъема груза грузовой лебедкой электропривод работает следующим образом.
Устанавливают командоаппаратом 38 (фиг.5) командоконтроллер 40 в положение «подъем» на позицию «1» (фиг.2). При этом включаются в работу (фиг.3) контакты 1К1 в цепях 41, 46, 53 и 55 и включаются в работу показанные на фиг.1 контакторы 1КМ1, 1КМ11, 1КМ4, последний включает реле 61 (фиг.3) времени 1КТ в цепи 42. Получает питание электродвигатель 1 (фиг.1) и обмотки 24С1-24С3 малой скорости электродвигателя 2, а также получает питание обмотка электродвигателя 3 гидротолкателя тормоза, который растормаживает лебедку и груз поднимается при совместной работе электродвигателей 1 и 2. При этом происходит подъем максимального груза на пониженной скорости.
Устанавливают командоконтроллер 40 (фиг.2) в положение «подъем» на позицию «2». При этом включаются в работу в цепи 46 (фиг.3) контакт 1К3, который включает контактор 1КМ7 (фиг.1, 3) и отключает показанный на фиг.1 контактор 1КМ11, который отключает электродвигатель 2. Контактор 1КМ7 (фиг.1, 3) при включении шунтирует часть сопротивления в цепи ротора электродвигателя 1, скорость вращения вала которого увеличивается.
Устанавливают командоконтроллер 40 (фиг.2) в положение «подъем» на позицию «3». При этом включается в цепи 51 (фиг.3) контакт 1К4, получают питание и включаются в работу с выдержкой времени контакторы 1КМ8-1КМ10 (фиг.1, 3). В этом случае выдержку времени обеспечивают реле 61 времени 1КТ (фиг.3), реле 62 времени 1КТ1, реле 63 времени 1КТ2 и реле 64 времени 1КТ3. При этом скорость вращения вала электродвигателя 1 будет номинальной и происходит подъем номинального груза с номинальной скоростью его подъема.
При нажатии на кнопку 58 ускорения (фиг.2, 5) блока управления 57 включается в цепи 54 (фиг.3) контакт 1К5. Если масса груза не превышает уставку ограничителя грузоподъемности, то контакт KF-T ограничителя грузоподъемности в цепи 54 будет замкнут. При этом включается показанный на фиг.1 контактор 1КМ12 и подключает обмотки 4С1-4С3 (фиг.1) вспомогательного электродвигателя 2. Одновременно контактор 1КМ12 отключает контакторы 1КМ4, 1КМ8-1КМ10. При этом отключается электродвигатель 1 от сети. Включается в цепь ротора электродвигателя блок 26 резисторов (фиг.1) и происходит подъем легкого груза на повышенной скорости.
При отпускании кнопки 58 ускорения (фиг.2, 5) отключаются контакторы 1КМ12 (фиг.1) и обмотки 4С1-4С3 электродвигателя 2, включается контактор 1КМ4, который подключает электродвигатель 1 к сети и с выдержкой времени включаются контакторы 1КМ8-1КМ10 (фиг.1, 3), при этом электродвигатель 1 переходит на номинальную скорость.
При переводе командоконтроллера 40 в позицию «2» (фиг.2) отключается в цепи 46 (фиг.3) контакт 1К4 и контакторы 1КМ8-1КМ10 (фиг.1, 3), при этом достигается вторая скорость вращения вала электродвигателя 1.
В позиции «1» командоконтроллера 40 (фиг.2) отключаются в цепи 48 (фиг.3) контакты 1К3 и 1К7, подключается контактор 1КМ11 (фиг.1, 3), который включает обмотки 24С1-24С3, при этом вал электродвигателя 1 вращается на первой скорости подъема груза.
В позиции «0» командоконтроллера 40 (фиг.2) в цепях 41, 55 (фиг.3) отключаются контакты 1К1 и отключаются показанные на фиг.1, 3 контакторы 1КМ1, 1КМ3, 1КМ4, при этом электродвигатель 1 отключается, обмотки 24С1-24С3 (фиг.1) и электродвигатели 1 и 2 обесточиваются, отключается электродвигатель 3 гидротолкателя тормоза и последний накладывается на тормозной шкив лебедки. Барабан лебедки не вращается, грузовой крюк находится в неподвижном положении.
В случае опускания груза грузовой лебедкой.
Устанавливают командоаппаратом 38 командоконтроллер 40 (фиг.2) в положение «спуск» на позицию «1». При этом включаются в цепях 44, 47, 49, и 51 (фиг.3) контакторы 1КМ2, 1КМ5, включается в цепи 44 контактор 1КМ2 и включается реле 1КА2, подключая контакторы 1КМ6 в цепи 49, 1КМ9 и 1КМ10 в цепи 51, при этом контакторы 1КМ5 и 1КМ6 подключают блок 37 коммутации (фиг.1). При нарастании тока подпитки электродвигателей до величины у ставки реле 1КА2 в цепи 44, это реле включается и подключает реле 61 времени 1КТ (фиг.3), которое подключает контактор 1КМ3 (фиг.1, 3) и растормаживает тормоз лебедки. Осуществляется опускание груза. При этом в электроприводе процесс опускания осуществляется методом динамического торможения самовозбуждением (при снятом тормозе на тормозном шкиву грузовой лебедки). При этом методе опускания груза могут быть два варианта.
Вариант первый. Если груз опускается легкий и не превышает уставку выходного реле KF-T (фиг.3) ограничителя грузоподъемности, то контакт реле KF-T замкнут.
При установке рукоятки командоконтроллера 40 (фиг.2) в положение "1" спуска (фиг.2) включается промежуточное реле 1К2 (фиг.3) в цепи 53 и через замкнутый контакт KF-T подает питание на контактор 1КМ11 (фиг.1, 3) малой скорости, который подключает к сети тихоходную обмотку вспомогательного электродвигателя 2. Одновременно контактором 1КМ11, без выдержки времени, подключается контактор ускорения 1КМ8, выводящий часть сопротивления из роторной цепи электродвигателя 1. Разомкнувшийся нормально закрытый контакт 1КМ11 (фиг.3) препятствует включению остальных контакторов ускорения. При этом осуществляется сложение механических характеристик динамического торможения самовозбуждения основного электродвигателя 1 и тихоходной обмотки 24С1-24С3 двухскоростного электродвигателя 2. Причем, если момент вращения от груза не превышает момента сопротивления от потерь в механической передаче механизма привода подъема и опускания груза, то осуществляется силовой спуск груза с малой скоростью на тихоходной обмотке электродвигателя 1.
Вариант второй. Если груз тяжелый и его масса превышает уставку выходного реле KF-T в цепи 53 (фиг.3) ограничителя грузоподъемности, то контакт реле KF-T разомкнут. При установке рукоятки командоаппарата 38 в положение "1" командоконтроллера 40 (фиг.2) включается в цепи 51 (фиг.3) промежуточное реле 1К2, при этом тихоходная обмотка 24С1-24С3 электродвигателя 2 (фиг.1) не включается, однако включаются контакторы 1КМ9, 1КМ10 (фиг.1, 3) через нормально закрытые контакты тормозного контактора 1КМ3. Последний в начальный момент времени не включается, а включается с выдержкой времени через контактор 1КМ8. Таким образом, из ротора электродвигателя 2 выводится все сопротивление (кроме небольшой невыключаемой ступени) и характеристика динамического торможения становится более жесткой, соответствующей кривой (1) на фиг.6. Происходит тормозной спуск тяжелого груза на малой скорости.
При переводе рукоятки командоаппарата 38 в позицию "2" командоконтрорллера 40 (фиг.2) выключается контакт 1К3 в цепи 51 (фиг.3) и отключает контакторы 1КМ8-1КМ10 (фиг.1, 3). Происходит увеличение скорости опускания груза.
При переводе рукоятки командоаппарата в позицию "3" командоконтроллера 40 (фиг.2) получают в цепях 46 и 51 (фиг.3) питание контакты 1К4, при этом включается 1КМ7, который отключает 1КМ5 (фиг.1, 3). При снижении тока подпитки ниже уставки реле 1КА2 в цепи 49, это реле отключается и отключается контактор 1КМ6, который подключает контактор 1КМ4. При этом контакт 1К4 подключает с выдержкой времени контакторы 1КМ8-1КМ10 (фиг.1, 3). При этом электродвигатель 1 выходит из режима динамического торможения самовозбуждением, подключается к сети и осуществляется бестоковая коммутация контактора 1КМ6 (фиг.1, 3) путем предварительного шунтирования контактором 1КМ7 выпрямительного моста 27 (фиг.1), в состав которого входят диоды 20-25 (фиг.1). При этом происходит опускание груза с номинальной скоростью.
При нажатии на кнопку ускорения 58 (фиг.5), при условии если масса груза не превышает уставки выходного реле KF-T ограничителя грузоподъемности, получает питание контактор 1КМ12 (фиг.1, 3), отключая контакторы 1КМ4 и 1КМ8-1КМ10. Электродвигатель 1 отключается от сети, вводятся сопротивления 1P блока 26 (фиг.1) цепи ротора этого электродвигателя и подключаются к сети обмотки 4С1-4С3 электродвигателя 2. Осуществляется опускание легкого груза на максимальной скорости.
Как следует из диаграммы включения в работу командоконтроллера по позициям, достигнуто формирование требуемой диаграммы замыкания при помощи комбинации выходных контактов промежуточного реле и благодаря этому сокращено число контактов и позиций включения. Это позволило в электроприводе применить в конструкции башенного крана всего два унифицированных упрощенной конструкции командоаппарата с симметричной схемой включения одной модели на четыре электропривода: электропривод механизма поворота крана, электропривод механизма перемещения крана по рельсовому пути, электропривод механизма подъема и опускания груза и электропривод механизма перемещения по стреле грузовой тележки. Возможность применения в электроприводе одной модели командоаппарата позволило сократить количество проводов, контактных элементов для различных типов низковольтных комплектующих устройств управления. При этом применяемый командоаппарат имеет по три позиции включения скоростей в каждом направлении подъема и спуска груза. Включение четвертой позиции осуществляется кнопкой, вмонтированной в рукоятку командоаппарата. Это позволило сохранить количество фиксированных скоростей электродвигателя - четыре скорости в направлении подъема груза и пять скоростей в направлении спуска груза.
Благодаря использованию данного электропривода в конструкции башенного крана обеспечена возможность осуществления порядка подключения тихоходной обмотки вспомогательного электродвигателя в тот момент, когда это необходимо, т.е. при легких грузах для формирования режима силового спуска груза. Опускание тяжелых грузов, преодолевших момент от потерь в механической передаче, осуществляется на меньшей скорости без подключения тихоходной обмотки. Обеспечена возможность подключения быстроходной обмотки вспомогательного двухскоростного электродвигателя кнопкой на рукоятке командоаппарата под контролем ограничителя грузоподъемности крана. Это позволило уменьшить износ электропривода, увеличить его ресурс и надежность.
Источники информации
1. GB 1129492 A, 09.10.1968.
2. US 3772579 A, 13.11.1973.
3. SU 1708748 A1, 30.01.1992.
4. SU 1741246 A1, 15.06.1992 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Устройство для управления лебедкой | 1981 |
|
SU981196A1 |
| Устройство для управления грузоподъемным механизмом | 1985 |
|
SU1384538A1 |
| Электропривод для грузоподъемного механизма | 1979 |
|
SU860246A1 |
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИМПУЛЬСНО-КЛЮЧЕВЫМ КОММУТАТОРОМ | 2002 |
|
RU2249297C2 |
| Устройство для динамического торможения асинхронного электродвигателя с фазным ротором | 1976 |
|
SU613469A1 |


Изобретение относится к многодвигательным электроприводам, используемым на грузоподъемных кранах. Основной электродвигатель выполнен с фазным ротором. На его валу установлен вспомогательный двухскоростной электродвигатель. Имеются также электродвигатели гидротолкателей тормоза, командоконтроллер управления с цепями подъема, спуска и переключения ступеней скорости основного электродвигателя, блок управления электродвигателями, сетевой контактор и контакторы переключения ступеней скорости, контакторы малой и большой скоростей подъема и спуска груза, контактор динамического торможения. Командоконтроллер управления и блок управления электродвигателями соединены с источником подпитки. Статорные обмотки электродвигателя гидротолкателей тормоза подключены к одноименным фазам основного электродвигателя, которые подключены к питающей сети. Обмотки высокой и низкой скоростей вспомогательного электродвигателя подключены к одноименным фазам статорной обмотки основного электродвигателя. В электропривод входит трехфазный мостовой выпрямитель, основные и дополнительный резисторы. Первые выводы основных резисторов соединены с фазными выводами обмотки ротора основного электродвигателя, первые выводы дополнительных резисторов соединены между собой, а вторые их выводы подключены к выводам переменного тока выпрямителя. Электропривод имеет блок резисторов. Первые выводы резисторов каждой группы соединены со вторым выводом резистора соответствующей фазы обмотки ротора основного электродвигателя, который соединен со вторым выводом резистора соответствующей группы блока резисторов. Последний подключен ко вторым выводам двух других резисторов этой группы и подключен к соответствующему выводу выпрямителя. Группы резисторов соединены между собой вторыми выводами резисторов, а катодный вывод выпрямителя соединен с электроприводом через реле максимального тока и диод динамического торможения. Один резистор соединен с первой фазой статорной обмотки основного электродвигателя, третья фаза которого соединена с анодным выводом выпрямителя. Реле минимального тока через второй диод динамического торможения подключено к первой и третьей фазам основного электродвигателя. Изобретение позволяет снизить износ электропривода, увеличить его ресурс и надежность. 6 ил.
Электропривод механизма подъема и опускания груза грузоподъемного крана, содержащий основной электродвигатель с фазным ротором, вспомогательный двухскоростной электродвигатель, установленный на валу основного электродвигателя, электродвигатели гидротолкателей тормоза, командоконтроллер управления с цепями подъема, спуска и переключения ступеней скорости основного электродвигателя, блок управления упомянутыми электродвигателями, включающий цепи с контакторами торможения, подъема и спуска груза, сетевой контактор и контакторы переключения ступеней скорости, контакторы малой и большой скоростей подъема и спуска груза, контактор динамического торможения, при этом командоконтроллер управления и блок управления электродвигателями соединены упомянутыми цепями с источником подпитки, а статорные обмотки электродвигателя гидротолкателей тормоза подключены к одноименным фазам основного электродвигателя, которые подключены к питающей сети, обмотки высокой и низкой скоростей вспомогательного электродвигателя подключены к одноименным фазам статорной обмотки основного электродвигателя, причем электропривод имеет трехфазный мостовой выпрямитель, основные и дополнительный резисторы, первые выводы основных резисторов соединены с фазными выводами обмотки ротора основного электродвигателя, при этом первые выводы дополнительных резисторов соединены между собой, а вторые их выводы подключены к выводам переменного тока трехфазного мостового выпрямителя, при этом электропривод имеет также блок резисторов, составленный из трех групп резисторов, причем первые выводы резисторов каждой группы соединены со вторым выводом резистора соответствующей фазы обмотки ротора основного электродвигателя, который соединен со вторым выводом резистора соответствующей группы блока резисторов, причем последний подключен ко вторым выводам двух других резисторов этой группы и подключен к соответствующему выводу трехфазного мостового выпрямителя переменного тока, причем группы резисторов упомянутого блока резисторов соединены между собой вторыми выводами резисторов, а катодный вывод трехфазного мостового выпрямителя соединен с электроприводом через реле максимального тока, диод динамического торможения, при этом один резистор соединен с первой фазой статорной обмотки основного электродвигателя, третья фаза которого соединена с анодным выводом трехфазного мостового выпрямителя, при этом реле минимального тока через второй диод динамического торможения подключено к первой и третьей фазам основного электродвигателя.
| Двухдвигательный электропривод | 1989 |
|
SU1741246A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1999 |
|
RU2176848C2 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 1992 |
|
RU2081504C1 |
| Многодвигательный электропривод переменного тока | 1991 |
|
SU1804693A3 |

