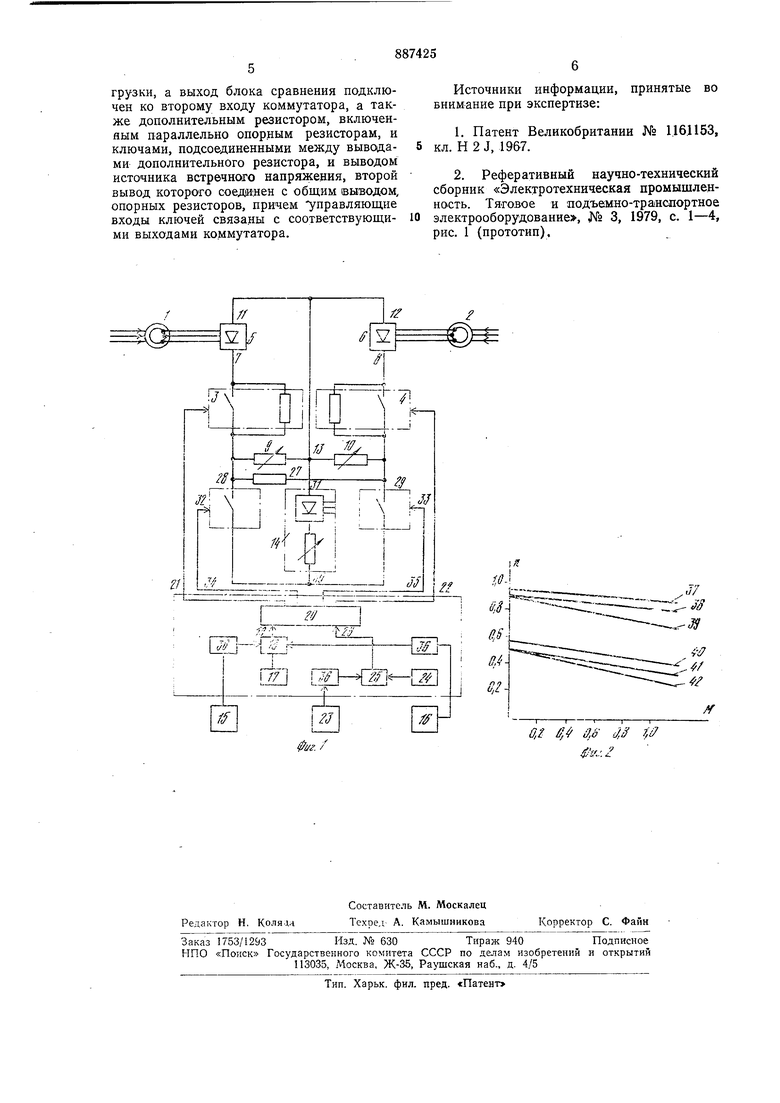
ристик механизмов грузоподъемного средства. Устройство для синхронного перемещения механизмов грузоподъемного средства предназначено лрвимущественяо для механизмов передвижения крана мостового типа и содержит синхронные двигатели 1, 2 механизмов, в цепь ротора которых включены регуляторы 3, 4 скольжения и выпрямители 5, 6, одни выходы 7, 8 которых подключены друг к другу через опорные резисторы 9, 10, а другие выхады 11, 12 соединены с общим выводом 13 опорных резисторов 9, 10, а также источник 14 встречного напряжения, включенный в цепь выпрямленного тока двигателей, и датчики 15, 16 перемещения механизмов с задатчиком 17 рассогласования, выходы которых через элемент 18 сравнения связаны со входом 19 коммутатора 20, выходы 21, 22 которого соединены со входами регуляторов 3, 4 скольжения.. Устройство снабжено датчиком 23 нагрузки грузоподъемного средства, задатчиком 24 нагрузки, блоком 25 сравнения, входы которого соединены с выходом датчика 23 нагрузки грузоподъемного средства и задатчика 24 нагрузки, а выход блока 25 сравнения подключен ко второму входу 26 коммутатора 20, а также дополнительным резистором 27, включенным параллельно опорным резистором 9, 10, и ключами 28, 29, подсоединенными между выводами дополнительного резистора и выводом 30 источника 14 встречного напряжения, второй вывод 31 которого соединен с общим выводом 13 опорных резисторов 9, 10, причем управляющие входы 32, 33 ключей 28, 29 связаны с соответствующими выходами 34, 35 коммутатора 20. Устройство может быть выполнено с усилителями 36. На фиг. 2 показаны механические характеристикп механизмов грузоподъемного средства. Характеристика 37 соответствует механической характеристике асинхронных двигателей 1, 2, характеристики 38, 39 соответствуют реальным механическим характеристикам механизмов с учетом разброса параметров регуляторов 3, 4, характеристики 40, 41, 42 соответствуют возможным механическим характеристикам механизмов с учетом разброса параметров резисторов 9, 10 и регуляторов 3, 4. Устройство работает следующим образом. Частота вращения двигателей 1, 2 может регулироваться с помощью регуляторов 3, 4 резисторов 9, 10 и ключей 28, 29. При отсутствии перекоса крана частота вращения двигателей 1, 2 может регулироваться посредством одновременного изменения сопротивления резисторов 9, 10 и изменения напряжения источника 14. В случае упреждения механизма крана с двигателем 2 на величину, превышающую заданную уставкой задатчика 17 величину рассогласования пути, может возникнуть два случая. При нагрузке, равной или превыщающей уставку задатчика 24, происходит следующее. Разность сигналов датчиков 15, 16 пути после усиления усилителями 36, сравнивается в элементе 19 сравнения с уставкой задатчика 17 рассогласования пути и, в случае превыщения этой уставки, сигнал подается в коммутатор 20. Второй сигнал подается в коммутатор 20 от блока 25 сравнения, так как сигнал датчика 23 нагрузки превыщает уставку задатчика 24 рассогласования нагрузки. В результате поступления на коммутатор 20 двух упомянутых входных сигналов регулятор 4 переводит двигатель на работу на более мягкой характеристике, при этом уменьщается скорость механизма с двигателем 2 на время устранения перекоса крана. В случае такого же перекоса крана, но при на грузке, не достигающей з-аданной задатчиком 24 уставки, устройство действует аналогично, но с выхода блока 25 сравнения поступает на коммутатор 20 сигнал, при этом отключается клю1Ч 28, что приводит к увеличению частоты вращения двигателя 1 на время устранения перекоса крана. Изобретение позволяет повысить производительность крана за счет повышения качества синхронизации механизмов. Формула изобретения Устройство для синхронного перемещения механизмов грузоподъемного средства, Преимущественно для механизмов передвижения кр.ана мостового типа, содержащее асинхронные двигатели механизмов, в цепь ротора которых включены регуляторы скольжения и выпрямители, одни выходы .которых подключены друг к другу -через опорные резисторы, а другие выходы соединены с общим выводом опорных резисторов, а также источник встречного напряжения, включенный в цепь выпрямленного тока двигателей, и датчики перемещения механизмов с задатчиками рассогласования, выходы которых через элементы сравнения связаны со входом коммутатора, выходы которого соединены со входами регуляторов скольжения, отличаю1п. е е с я тем, что, с целью повыщения производительности грузоподъемного средства за счет повышения качества синхронизации, оно снабжено датчиком нагрузки грузоподъемного средства, задатчиком нагрузки, блоком сравнения, входы которого соединены с выходом датчика нагрузки грузоподъемного средства и задатчика нагрузки, а выход блока сравнения подключен ко второму входу коммутатора, а также дополнительным резистором, включенным параллельно опорным резисторам, и ключами, подсоединенными между выводами дополнительного резистора, и выводом источника встречного напряжения, второй вывод которого соединен с общим выводом, опорных резисторов, причем управляющие входы ключей связаны с соответствующими выходами коммутатора.
Источники информации, принятые во внимание при экспертизе:
1.Патент Великобритании № 116.1153, кл. Н2 J, 1967.
2.Реферативный научно-технический сборник «Электротехническая промышленность. Тяговое и подъемно-транспортное
электрооборудование, № 3, 1979, с. 1-4, рис. 1 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Устройство для управления приводом механизма передвижения опор крана | 1982 |
|
SU1047821A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Асинхронный электропривод | 1989 |
|
SU1617611A1 |
| Устройство для управления электроприводами механизмов перемещения грузоподъемного средства | 1987 |
|
SU1421674A1 |
| Устройство для динамического торможения автономного транспортного средства | 1979 |
|
SU867718A1 |
| Устройство для управления асинхронным двигателем | 1978 |
|
SU773877A1 |
| Устройство для управления процессом бурения | 1989 |
|
SU1647126A1 |
| СПОСОБ ФОРМИРОВАНИЯ БЕССТЕННЫХ БАШЕННЫХ ХРАНИЛИЩ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2010487C1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
