Предпосылки создания изобретения
Настоящее изобретение относится к скважинным устройствам и способам для магнитных измерений, которые можно использовать во время бурения. Скважинные устройства для магнитных измерений могут быть полезными при определении ориентации скважинного прибора, уклонении от существующей скважины, пересечении скважины и контроле целостности измерительного прибора.
Желательно правильно и точно определять положение и ориентацию буровой компоновки во время буровых работ, особенно при бурении искривленной скважины. Обычно комбинацию датчиков используют для определения траектории ствола скважины и подземных условий. Данные, собираемые таким образом, обычно передают на поверхность по системе забойной телеметрии, известной в данной области техники, с тем, чтобы передать эту информацию о траектории на поверхность. Многие факторы могут сочетаться и непредсказуемо влиять на траекторию пробуриваемого ствола скважины. Важно точно определять траекторию ствола скважины, чтобы находить положение ствола скважины в любой заданной точке, представляющей интерес, и чтобы направлять ствол скважины к геологическому объекту. В дополнение к этому при бурении часто необходимо избегать пересечения других нежелательных объектов, геологических объектов, скважин или зон. В других случаях необходимо пересекать другие желательные объекты, геологические объекты, скважины или зоны. Поэтому, исходя из необходимости исключения пересечения или необходимости пересечения, желательно прогнозировать присутствие таких объектов.
В некоторых случаях исследование ствола скважины с использованием обычных способов включает в себя периодические измерения на компоновке низа бурильной колонны магнитного и гравитационного полей Земли для определения азимута и наклона ствола скважины. Традиционно эти измерения выполняют при неподвижной компоновке низа бурильной колонны, поскольку на эти измерения сильно влияет вращение компоновки низа бурильной колонны. Эти «статические» измерения обычно выполняют на отдельных исследовательских «станциях» вдоль ствола скважины, которые подвешивают при выполнении буровых работ, когда к бурильной колонне подсоединяют дополнительные звенья или свечи бурильных труб. Следовательно, глубина или расстояние вдоль ствола скважины между отдельными исследовательскими станциями обычно составляет от 30 до 60 или 90 футов (от 9,144 до 18,288 или 27,432 м) или больше, что соответствует длине звеньев или свечей бурильных труб, добавляемых на поверхности. Хотя имеются несколько причин, по которым измерения в процессе бурения выполняют только при отсутствии вращения бурильной колонны, главная причина, по которой делают это, заключается в том, что группами датчиков, обычно используемыми для измерения азимута и наклона бурильной колонны (например, группами трехосных акселерометрических и магнитометрических датчиков), формируются наиболее надежные выходные сигналы только в тех случаях, когда бурильная колонна является неподвижной.
Таким образом, в конкретных обычных способах скважинных исследований конкретные отсчеты параметров или результаты исследований получают в стволе скважины только в случае, когда бурильная колонна не вращается. Одним нежелательным следствием таких обычных способов получения отсчетов магнитометрического датчика только в отсутствие вращения бурильной колонны является то, что отсчеты магнитометрического датчика недоступны во время бурения, которое часто может продолжаться по глубине от 30 до 90 футов (от 9,144 до 27,432 м) или больше. В соответствии с этим в течение периода бурения на протяжении секции бурильной колонны бурение осуществляют без получения полезного результата от магнитометрических измерений в реальном времени. Как вариант бурение можно временно прекращать, чтобы делать возможными магнитометрические измерения, но такой подход приводит к значительным потерям времени, при этом существенно затягивается бурение.
Однако существуют обстоятельства, в которых особенно желательно иметь возможность измерять азимут или наклон в то время, когда бурильная колонна вращается. Примеры таких обстоятельств включают в себя, но без ограничения ими, (а) скважины, бурение которых является особенно трудным, и при любом временном прекращении вращения могут усугубляться проблемы, связанные с прихватом бурильной колонны, и (b) ситуации, в которых знание азимута является желательным для прогнозирования в реальном времени траектории ствола скважины.
Преимущественно с использованием математических способов компенсации и интерполяции делались попытки определять магнитное поле во время вращения бурильной колонны. Однако эти обычные способы имеют ряд недостатков, а именно неточности, которые часто складываются с течением времени, приводя в некоторых случаях к неточным и имеющим случайную ошибку данным. Таким образом, обычными способами невозможно обнаруживать и учитывать отклонения ствола скважины, которые наблюдаются между исследовательскими станциями, и/или им присущи неточности и случайные ошибки. В соответствии с этим для исключения одного или нескольких недостатков из предшествующего уровня техники имеется необходимость в усовершенствованных скважинных устройствах и способах для магнитных измерений.
Краткое изложение
Настоящее изобретения относится к скважинным устройствам и способам для магнитных измерений, которые можно использовать во время бурения. Скважинные устройства для магнитных измерений могут быть полезными при определении ориентации скважинного прибора, уклонении от существующей скважины, пересечении существующей скважины и контроле целостности измерительного прибора.
Один пример способа определения среднего значения полного магнитного поля во время бурения содержит размещение трехосного векторного магнитометра, прикрепляемого к узлу бурильной колонны, при этом трехосный векторный магнитометр выполняют с возможностью измерения трех ортогональных составляющих магнитных полей; обеспечение вращения узла бурильной колонны; и определение среднего значения (B TwR) полного магнитного поля как средней величины мгновенной векторной суммы трех ортогональных составляющих магнитных полей во время этапа обеспечения вращения узла бурильной колонны.
Один пример способа обнаружения присутствия внешнего ферромагнитного материала содержит размещение трехосного векторного магнитометра, прикрепляемого к узлу бурильной колонны, при этом трехосный векторный магнитометр выполняют с возможностью измерения трех ортогональных составляющих магнитных полей; обеспечение вращения узла бурильной колонны; бурение секции ствола скважины; определение множества средних полных магнитных полей вдоль секции ствола скважины, при этом средние полные магнитные поля являются средним мгновенных модулей векторов трех ортогональных составляющих магнитных полей во время этапа обеспечения вращения узла бурильной колонны; и идентификацию присутствия внешнего ферромагнитного материала как участка секции, где средние полные магнитные поля отклоняются от ожидаемого магнитного поля Земли.
Один пример способа оценивания эксплуатационного качества скважинной аппаратуры содержит размещение трехосного векторного магнитометра, прикрепляемого к узлу бурильной колонны, при этом трехосный векторный магнитометр выполняют с возможностью измерения трех ортогональных составляющих магнитных полей; обеспечение вращения узла бурильной колонны; определение среднего (B TwR) полного магнитного поля как среднего мгновенных модулей векторов трех ортогональных составляющих магнитных полей во время этапа обеспечения вращения узла бурильной колонны; прекращение на время вращения узла бурильной колонны; измерение стационарного полного магнитного поля в то время, когда узел бурильной колонны является неподвижным, с тем, чтобы получать измерение стационарного полного магнитного поля; и сравнение среднего (B TwR) полного магнитного поля с измерением стационарного полного магнитного поля с тем, чтобы определять величину ошибки между полным магнитным полем (B TwR) и измерением стационарного полного магнитного поля.
Один пример устройства для определения среднего значения полного магнитного поля во время бурения содержит узел бурильной колонны; процессор; первый векторный магнитометр, при этом первый векторный магнитометр соответствует оси вдоль ствола скважины, при этом первый векторный магнитометр выполнен с возможностью измерения первой векторной составляющей магнитного поля, первый векторный магнитометр имеет выход, с возможностью передачи информации, связанный с процессором; второй векторный магнитометр, при этом второй векторный магнитометр соответствует оси поперек ствола скважины, при этом второй векторный магнитометр выполнен с возможностью измерения второй векторной составляющей магнитного поля, второй векторный магнитометр имеет выход, с возможностью передачи информации, связанный с процессором; третий векторный магнитометр, при этом третий векторный магнитометр соответствует оси поперек ствола скважины, при этом третий векторный магнитометр выполнен с возможностью измерения третьей векторной составляющей магнитного поля, третий векторный магнитометр имеет выход, с возможностью передачи информации связанный с процессором; в котором первый векторный магнитометр, второй векторный магнитометр и третий векторный магнитометр прикреплены к узлу бурильной колонны; в котором ось вдоль ствола скважины является ортогональной к оси поперек ствола скважины второго векторного магнитометра и третьего векторного магнитометра и в котором ось поперек ствола скважины второго векторного магнитометра является ортогональной к оси поперек ствола скважины третьего векторного магнитометра; в котором процессор выполнен с возможностью определения среднего значения (B TwR) полного магнитного поля как среднего мгновенных модулей векторов первой векторной составляющей магнитного поля, второй векторной составляющей магнитного поля и третьей векторной составляющей магнитного поля.
Один пример способа определения среднего значения магнитного поля поперек оси во время бурения содержит размещение двухосного векторного магнитометра, прикрепляемого к узлу бурильной колонны, при этом двухосный векторный магнитометр выполняют с возможностью измерения двух ортогональных составляющих магнитных полей; обеспечение вращения узла бурильной колонны; и определение среднего значения (B
CwR) магнитного поля поперек оси как средней величины мгновенной векторной суммы двух ортогональных составляющих магнитных полей во время этапа обеспечения вращения узла бурильной колонны, при этом значение (B
CwR) полного магнитного поля вычисляют в соответствии с формулой: 
Признаки и преимущества настоящего изобретения должны быть очевидными для специалистов в данной области техники. Хотя многочисленные изменения могут быть сделаны специалистами в данной области техники, такие изменения находятся в пределах сущности изобретения.
Краткое описание чертежей
Более полно понять настоящее раскрытие и преимущества его можно при обращении к нижеследующему описанию в сочетании с сопровождающими чертежами, на которых:
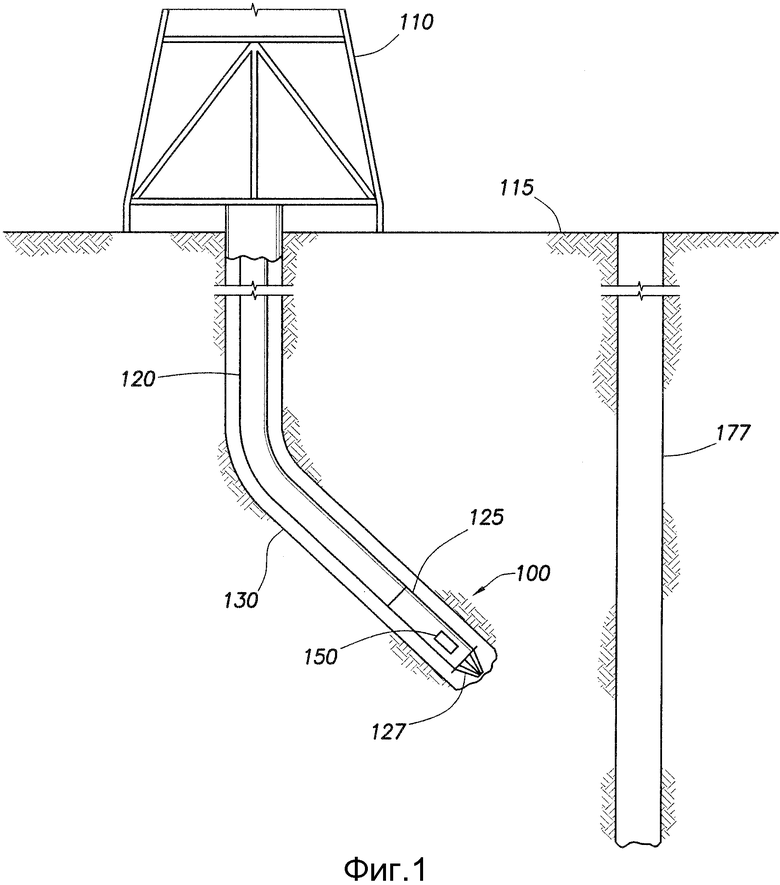
фиг.1 - вид бурильной колонны при бурении криволинейной скважины, при этом бурильная колонна несет устройство для измерения магнитного поля;
фиг.2 - функциональная схема устройства для измерения магнитного поля согласно некоторым осуществлениям настоящего изобретения; и
фиг.3 - график для сравнения измерений полного магнитного поля при вращении и в стационарном состоянии.
Хотя в настоящем изобретении допускаются различные модификации и альтернативные формы, конкретные примеры осуществления его показаны на чертежах для примера и подробно описываются в этой заявке. Однако следует понимать, что описание в этой заявке конкретных осуществлений не предполагает ограничения изобретения конкретными раскрываемыми формами, а наоборот предполагает охват всех модификаций, эквивалентов и вариантов, попадающих в рамки сущности и объема изобретения, определяемых прилагаемой формулой изобретения.
Описание предпочтительных осуществлений
Настоящее изобретение относится к скважинным устройствам и способам для магнитных измерений, которые можно использовать во время бурения. Эти скважинные устройства для магнитных измерений могут быть полезными при определении ориентации скважинных приборов, уклонении от существующей скважины, пересечении существующей скважины и проверке целостности аппаратуры.
Предложены способы и системы, которые позволяют осуществлять скважинные измерения магнитных полей во время бурения. В некоторых осуществлениях трехосный векторный магнитометр размещают и прикрепляют к узлу бурильной колонны. Как следует из названия, трехосный векторный магнитометр выполнен с возможностью измерения трех ортогональных составляющих магнитных полей. Узел бурильной колонны обычно располагают вблизи бурового долота с тем, чтобы лучше аппроксимировать условия на буровом долоте. Когда узел бурильной колонны вращается во время буровых работ, среднее значение (B TwR) полного магнитного поля находят как среднее мгновенных модулей векторов трех ортогональных составляющих магнитных полей. Таким образом, оценки скважинного магнитного поля вблизи долота можно получать и использовать для решения различных задач.
Как будет показано ниже, в дополнение к этому наклон и/или азимут ствола скважины также можно определять на основании данных магнитометра и акселерометра. Кроме того, вычисляемые при этом значения можно использовать для решения прикладных задач уклонения от существующей скважины и пересечения существующей скважины. В некоторых осуществлениях способы и устройства этой заявки могут давать более высокую точность определения значений магнитного поля, наклона и азимута, чем обычные способы. Даже небольшие повышения точности могут оказывать значительное влияние на скважинные исследования и прогнозы уклонения/пересечения, поскольку при таких вычислениях существует тенденция суммирования существующих ошибок с течением времени. Осуществлениями настоящего изобретения предоставляются другие дополнительные признаки, поясняемые ниже. Кроме того, предложены способы обнаружения присутствия внешнего ферромагнитного материала, которые также можно использовать для решения прикладных задач уклонения от существующей скважины и пересечения существующей скважины.
Для содействия лучшему пониманию настоящего изобретения ниже приводятся примеры некоторых осуществлений. Нижеследующие примеры никоим образом не следует считать ограничивающими или определяющими объем изобретения.
Определение магнитного поля
На фиг.1 показано бурение искривленного ствола скважины бурильной колонной, несущей устройство для измерения магнитного поля. Более конкретно, буровая установка 110 на поверхности 115 показана осуществляющей бурение ствола 130 скважины. На этой упрощенной схеме бурильная колонна 120 состоит из нескольких секций бурильных труб и включает в себя компоновку 125 низа бурильной колонны с буровым долотом 127.
Устройство 150 представляет собой скважинный прибор или модуль измерительного прибора, предназначенный для измерения значений магнитного поля, и прикреплено к компоновке 125 низа бурильной колонны. Хотя устройство 150 показано здесь как прикрепленное определенно к компоновке 125 низа бурильной колонны, устройство 150 может быть прикреплено к любому узлу бурильной колонны. Используемый в этой заявке термин «узел бурильной колонны» обозначает любую секцию или узел бурильной колонны, включая любой участок компоновки низа бурильной колонны. Используемый в этой заявке термин «прикреплен к» однозначно включает в себя встраивание устройства 150 в узел бурильной колонны, закрепление на поверхности узла бурильной колонны или любое сочетание из них. В некоторых осуществлениях устройство 150 закреплено вблизи бурового долота в немагнитной муфте над забойным двигателем. Внешний ферромагнитный материал 177 (например, в виде обсадной колонны или бурильной колонны второй скважины) показан вблизи ствола 130 скважины. Как будет дополнительно пояснено ниже, в некоторых осуществлениях устройство 150 выполнено с возможностью обнаружения присутствия такого внешнего ферромагнитного материала 177.
На фиг.2 показана функциональная схема устройства 150 для измерения магнитного поля согласно некоторым осуществлениям настоящего изобретения. На фиг.2 показана одна возможная реализация устройства 150. Специалист в данной области техники, имеющий выгоду от этого раскрытия, должен осознавать, что многие из отдельных компонентов, показанных на фиг.2, являются необязательными.
Трехосный векторный магнитометр 210 выполнен с возможностью измерения трех ортогональных составляющих магнитных полей. В этом осуществлении в корпусе трехосного векторного магнитометра 210 размещены три отдельных векторных магнитометра 211, 212 и 213. В некоторых осуществлениях векторные магнитометры 211, 212 и 213 могут быть объединены во всего лишь один датчик. В соответствии с этим используемый в этой заявке термин «трехосный векторный магнитометр» относится к трехосным компонентным магнитометрам, состоящим из множества независимых датчиков, и трехосным магнитометрам, в которых функции трехосных компонентных измерений объединены в одном датчике.
Акселерометры 201, 202 и 203 обеспечивают дополнительные данные измерений, которые, как представлено ниже, при необходимости могут использоваться в способах. В некоторых случаях вместо одного или нескольких акселерометров может быть инклинометр.
В таком случае выходные сигналы 207, 208, 209, 217, 218 и 219 датчика передаются на блок 220 обработки с фильтрацией и усилением для выполнения необязательной фильтрации и/или, по желанию, усиления сигналов. Понятно, что обработка, обеспечиваемая блоком 220 обработки с фильтрацией и усилением, может выполняться цифровыми схемами, такими как микропроцессор, или аналоговыми схемами. Соответственно, в данном случае термин «обработка» необязательно означает наличие процессора. Используемый по желанию задающий генератор 261 запускает генератор 263 феррозондов, который в свою очередь используется феррозондовыми магнитометрами.
Мультиплексор 230, аналого-цифровой преобразователь (АЦП) 233 и фиксирующий блок 235, а также микропроцессор 250 совместно обеспечивают обработку выходных сигналов 217, 218 и 219 датчика. Управляющая шина 242 и шина 244 данных обеспечивают стыкуемость и функциональность при обмене информацией между различными показанными компонентами и функционирование этих компонентов. Показанная здесь конкретная точная реализация аппаратного обеспечения является только одной возможной реализацией и, как должно быть понятно специалисту в данной области техники, имеющему выгоду от этого раскрытия, обработка, описываемая в этой заявке, может быть выполнена с помощью различных реализаций аппаратного обеспечения. Более конкретно, микропроцессор 250, который снабжается энергией от источника 249 питания, определяет среднее значение (B TwR) полного магнитного поля на основании выходных сигналов 217, 218 и 219 датчика.
Другой возможный вариант реализации включает в себя одновременно берущий выборки аналого-цифровой преобразователь, которые берет выборки каждого из входных сигналов B x, B y, B z одновременно, а не последовательно, как в показанной реализации с мультиплексором и простым аналого-цифровым преобразователем в аппаратном обеспечении, изображенной на фиг.2. Преимущество такого варианта технического решения заключается в исключении ошибки, обусловленной выборками B x, B y, B z, которые берутся в различные моменты времени. Однако эту ошибку можно уменьшать, используя частоту выборки, которая является достаточно высокой по сравнению с максимальной частотой вращения, ожидаемой для этого применения, с тем, чтобы уменьшать ошибку, которая является результатом угловых разностей между выборками.
Используемый в этой заявке термин «среднее значение полного магнитного поля» означает среднюю величину мгновенной векторной суммы трех ортогональных составляющих магнитных полей. Используемый в этой заявке термин «средняя величина мгновенной векторной суммы трех ортогональных составляющих магнитного поля» означает
 [Уравнение В1]
[Уравнение В1]
или его любой реальный математический эквивалент. В данном случае каждый член из B xi, B yi, B zi соответствует одной из трех ортогональных составляющих магнитных полей. Обычно B zi используют для обозначения составляющей магнитных полей, соответствующей оси вдоль ствола скважины, тогда как B xi и B yi обычно относят к составляющим магнитных полей поперек ствола скважины. Подходящие примеры реальных математических эквивалентов среднего мгновенных модулей векторов трех ортогональных составляющих магнитных полей включают в себя, но без ограничения ими,
 [Уравнение В2]
[Уравнение В2]
 [Уравнение В3]
[Уравнение В3]
или любую математическую функцию, которая дает по существу аналогичный результат вычислений в пределах заданного диапазона, представляющего интерес. Уравнение В3 может быть предпочтительным в некоторых осуществлениях, поскольку в соответствии с этим уравнением квадратный корень необходимо вычислять только один раз вместо нескольких раз. Понятно, что уравнение В1 и уравнение В3 не точно равны за исключением случая, когда сумма 

[Уравнение В4]
или любой реальный математический эквивалент его. Как и раньше, понятно, что двухосный магнитометр может состоять из двух независимых датчиков или может состоять из одного датчика, который объединяет функции двух независимых датчиков в одном датчике.
Эти вычисления можно выполнять, когда во время бурения узел бурильной колонны вращается. Соответственно, эти алгоритмы позволяют точно вычислять среднее полное магнитное поле и среднее магнитное поле поперек оси во время бурения. Таким образом, помещая устройство 150 в или на вращающуюся часть бурильной колонны, можно определять среднее полное магнитное поле и среднее магнитное поле поперек оси на участке бурильной колонны вблизи бурового долота.
Векторные магнитометры 211, 212 и 213 должны иметь достаточно большую ширину полосы частот, чтобы не было значительного ослабления сигнала при максимальной ожидаемой скорости вращения.
Внутренними часами микропроцессора 250 обеспечивается дата и маркеры времени для измеряемых и вычисляемых данных, сохраняемых в запоминающем устройстве 237. В некоторых осуществлениях запоминающее устройство 237 может содержать флэш-память. Кроме того, измеряемые и вычисляемые данные могут передаваться на последовательную шину 257 через контроллер 255 последовательной шины для передачи к наземному компьютеру или для использования другими датчиками и/или приборами. Передача этих данных к наземному компьютеру может осуществляться с использованием каротажного кабеля снабженной проводом скважинной колонны, забойной телеметрии по гидроимпульсному каналу связи, забойной телеметрии по радиоканалу или других способов скважинной беспроводной телеметрии, таких как акустическая телеметрия, или любого их сочетания.
Определение магнитного угла
Кроме того, устройство 150 можно также выполнять с возможностью определения угла между осью ствола скважины и вектором магнитного поля Земли, в дальнейшем обозначаемого как B Angle(θ). В частности, микропроцессор 250 можно выполнять с возможностью определения вычисляемого B Angle(θ) узла бурильной колоны в соответствии с формулой:

 [Уравнение Т1]
[Уравнение Т1]
или ее реальным математическим эквивалентом, где B z обозначает составляющую (B z) вектора магнитного поля вдоль оси ствола скважины. Таким образом, B Angle(θ) узла бурильной колонны можно использовать для оценивания изменений направления ствола скважины, а при бурильных работах в качестве индикатора расположенного поблизости ферромагнитного материала.
Определение азимута
Устройство 150 можно также выполнять с возможностью определения вычисляемого азимута. После определения наклона независимым датчиком, таким как инклинометр, вычисляемый магнитный азимут Azm может быть найден микропроцессором 250. В частности, может быть использована формула:
 [Уравнение А1]
[Уравнение А1]
где Inc является измерением инклинометра, где B Angle(θ) находится в соответствии с уравнением Т1 и где Dip является углом наклона, то есть наклоном от горизонтали магнитного поля Земли. Чтобы исключать ошибку, обусловленную изменением наклона с течением времени, измерение инклинометра должно почти совпадать по времени с измерениями магнитометра, используемыми для определения B Angle(θ). Угол наклона может быть найден из геомагнитной модели или из стационарного измерения с использованием магнитометров и акселерометров. Знак Azm, определяемый таким образом, может быть положительным или отрицательным и должен выбираться на основании предшествующих исследований в стационарных условиях. В дополнение к этому реальный математический эквивалент уравнения А1 можно использовать как вариант для получения по существу аналогичного значения.
Обнаружение внешнего ферромагнитного материала
Кроме того, устройство 150 можно также выполнить с возможностью обнаружения присутствия внешнего ферромагнитного материала во время бурения. Обнаружение присутствия внешнего ферромагнитного материала, такого как другие скважинные обсадные колонны или другие бурильные колонны, является особенно полезным при решении прикладных задач уклонения от существующей скважины или пересечения существующей скважины. В некоторых осуществлениях способы обнаружения присутствия внешнего ферромагнитного материала во время бурения содержат определение множества средних полных магнитных полей вдоль пробуриваемой секции ствола скважины и идентификацию присутствия внешнего ферромагнитного материала в виде участка секции, где среднее полное магнитное поле отклоняется от ожидаемого магнитного поля Земли. В этом случае используемый в этой заявке термин «среднее полное магнитное поле» означает среднюю величину мгновенной векторной суммы трех ортогональных составляющих магнитных полей, которую можно оценивать любым из предшествующих способов, описанных выше. Этот вариант устройства также включает в себя использование только некоторых составляющих среднего полного магнитного поля, включая по меньшей мере одну из B TwR, B CwR и B z.
Термином «ожидаемое магнитное поле Земли» представлено значение магнитного поля Земли в отсутствие всякого внешнего ферромагнитного материала. Это значение можно определять рядом способов, в том числе, но без ограничения им, измерением магнитного поля Земли в секции ствола скважины, заведомо находящейся вне зоны действия любого внешнего ферромагнитного материала. Как вариант это значение можно получать из математической модели геомагнитного поля, результата измерения на поверхности или из любого их сочетания.
В дополнение к определению присутствия внешнего ферромагнитного материала можно также оценивать расстояние до внешнего ферромагнитного материала. Способы оценивания расстояния до внешнего ферромагнитного материала содержат определение амплитуды и пространственной частоты разности между ожидаемым магнитным полем Земли и средним значением (B TwR) полного магнитного поля на протяжении секции ствола скважины и сравнение амплитуды и пространственной частоты разностного сигнала B TwR с амплитудой и пространственной частотой ожидаемого разностного сигнала от предполагаемого источника на предполагаемом расстоянии. Ожидаемый разностный сигнал можно оценивать на основании теоретических данных по компьютерной модели. В общем случае разностный сигнал B TwR можно определять вычитанием полного магнитного поля Земли из сигнала B TwR.
Амплитуда и пространственная частота характеризуют расстояние до источника помехи, которым может быть скважинная обсадная колонна или другая бурильная колонна. Сравнивая амплитуду и пространственную частоту измеряемого разностного сигнала B TwR с ожидаемым разностным сигналом от предполагаемого источника на предполагаемом расстоянии, можно оценивать расстояние до внешнего ферромагнитного материала как расстояние, которое соответствует предполагаемым источнику и расстоянию, при которых создаются те же самые амплитуда и пространственная частота. Соответственно, при желании это оцениваемое расстояние можно использовать при уклонении от существующей скважины или пересечении существующей скважины.
Проверка целостности измерительного прибора
Среднее полное магнитное поле (B TwR), которое вычисляют во время бурения, можно также использовать для проверки целостности измерительного прибора. Как и раньше, среднее полное магнитное поле (B TwR) можно вычислять во время бурения. Затем это значение можно сравнивать с измерениями стационарного магнитного поля. Можно сравнивать среднее полное магнитное поле (B TwR) с измерением стационарного полного магнитного поля с тем, чтобы определять величину ошибки между полным магнитным полем (B TwR) и измерением стационарного полного магнитного поля. Если значения расходятся в отсутствие внешнего ферромагнитного материала, можно заключить, что существует проблема с измерительным прибором.
В некоторых осуществлениях этап измерения стационарного полного магнитного поля можно выполнять путем измерения стационарного полного магнитного поля независимым прибором для измерения магнитного поля в то время, когда компоновка узла бурильной колонны является неподвижной. В других осуществлениях этап измерения стационарного полного магнитного поля можно выполнять путем измерения стационарного полного магнитного поля трехосным векторным магнитометром в то время, когда компоновка узла бурильной колонны является неподвижной.
Однозначно понятно, что любой из элементов и признаков каждого из устройств, описанных в этой заявке, можно использовать без ограничения вместе с любым из других устройств, описанных в этой заявке. Кроме того, однозначно понятно, что этапы способов, изложенных в этой заявке, можно выполнять в любом порядке за исключением случаев, когда ясно указано иное или в соответствии с конкретным способом по существу требуется иное.
Примеры
Для содействия лучшему пониманию настоящего изобретения ниже даются примеры отдельных аспектов некоторых осуществлений. Ни в коей мере нижеследующие примеры не следует считать ограничивающими или определяющими объем изобретения.
Прибор для измерения в процессе бурения, модифицированный для регистрации B TwR, спускали в ствол скважины в сочетании со стандартным прибором для измерения в процессе бурения. Измеряемые значения B TwR регистрировали при возобновлении бурения. Затем без вращения бурильной колонны значения получали в стационарном состоянии через каждые 2 фута (0,6096 м) вдоль ствола скважины и согласовывали с точками данных B TwR. Значения B z от двух различных приборов корректировали для компенсации магнитной интерференции, обусловленной различными положениями в бурильной колонне.
На фиг.3 показаны для сравнения данные B TwR, зарегистрированные при возобновлении бурения, и значения B total в стационарном состоянии, зарегистрированные стандартным прибором для измерения в процессе бурения. Прибор для измерения B TwR был расположен примерно на 6 футов (1,8288 м) ниже места измерения в процессе бурения. Соответственно, как показано с помощью данных на фиг.3, вычисленные значения B TwR во время бурения хорошо коррелированны со значениями B total, зарегистрированными стандартным прибором в стационарном состоянии, что демонстрирует эффективность отдельных осуществлений настоящего изобретения.
Следовательно, настоящее изобретение хорошо приспособлено для достижения упомянутых результатов и преимуществ. Конкретные осуществления, раскрытые выше, являются только иллюстративными, поскольку настоящее изобретение можно модифицировать и применять на практике различными, но эквивалентными способами, очевидными для специалистов в данной области техники, имеющих выгоду от идей, изложенных в этой заявке. Кроме того, не предполагаются ограничения относительно деталей конструкции или расчета, показанных в этой заявке, за исключением описанных ниже в формуле изобретения. Поэтому очевидно, что конкретные иллюстративные осуществления, раскрытые выше, могут быть изменены или модифицированы, и все такие варианты считаются находящимися в пределах объема и сущности настоящего изобретения. Кроме того, термины в формуле изобретения имеют ясные обычные значения за исключением случаев, когда иное однозначно и явно не определено заявителем патента.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО АЗИМУТА В СКВАЖИННОМ ИНКЛИНОМЕТРЕ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2290673C2 |
| АВТОМАТИЧЕСКАЯ ОЦЕНКА СКВАЖИННОГО ИССЛЕДОВАНИЯ | 2014 |
|
RU2613688C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ИНКЛИНОМЕТРИИ В ПРОЦЕССЕ БУРЕНИЯ НЕФТЕГАЗОВЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2758931C1 |
| ФЕРРОЗОНДОВЫЙ СКВАЖИННЫЙ ИНКЛИНОМЕТР | 2005 |
|
RU2291294C1 |
| УПРАВЛЕНИЕ С ОБРАТНОЙ СВЯЗЬЮ ПОЛОЖЕНИЕМ ОТКЛОНИТЕЛЯ В ХОДЕ БУРЕНИЯ | 2014 |
|
RU2611806C1 |
| СПОСОБ РАСЧЕТА ЛОКАЛЬНОГО ГЕОМАГНИТНОГО ВОЗМУЩАЮЩЕГО ПОЛЯ И ЕГО ПРАКТИЧЕСКОЕ ПРИМЕНЕНИЕ | 2014 |
|
RU2644179C2 |
| ВЫЧИСЛЕНИЕ СКОРОСТИ И ГЛУБИНЫ БУРЕНИЯ ДЛЯ СКВАЖИННЫХ ИНСТРУМЕНТОВ | 2013 |
|
RU2582608C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО АЗИМУТА В ПРОЦЕССЕ БУРЕНИЯ | 2009 |
|
RU2387827C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО АЗИМУТА В ПРОЦЕССЕ БУРЕНИЯ | 2007 |
|
RU2349938C1 |
| УСТРОЙСТВО, СИСТЕМЫ И СПОСОБЫ МАГНИТНОГО ОБНАРУЖЕНИЯ | 2012 |
|
RU2576627C1 |

Изобретение относится к магнитным измерениям в скважинах во время бурения. Сущность: прикрепляют трехосный векторный магнитометр к узлу бурильной колонны. Трехосный векторный магнитометр выполняют с возможностью измерения трех ортогональных составляющих магнитных полей. Вращают узел бурильной колонны. Определяют среднее значение (BTwR) полного магнитного поля во время вращения узла бурильной колонны в соответствии с формулой, выбираемой из группы, состоящей из:
 и
и
 где каждый член Bxi, Byi и Bzi соответствует одной из трех ортогональных составляющих магнитных полей. Технический результат: возможность оценивания наклона и азимута узлов бурильной колонны в стволе скважины во время буровых работ, обнаружения присутствия внешних электромагнитных материалов и расстояний до них, включая уклонение от существующей скважины, пересечение скважины и контроль целостности измерительного прибора. 19 з.п. ф-лы, 3 ил.
где каждый член Bxi, Byi и Bzi соответствует одной из трех ортогональных составляющих магнитных полей. Технический результат: возможность оценивания наклона и азимута узлов бурильной колонны в стволе скважины во время буровых работ, обнаружения присутствия внешних электромагнитных материалов и расстояний до них, включая уклонение от существующей скважины, пересечение скважины и контроль целостности измерительного прибора. 19 з.п. ф-лы, 3 ил.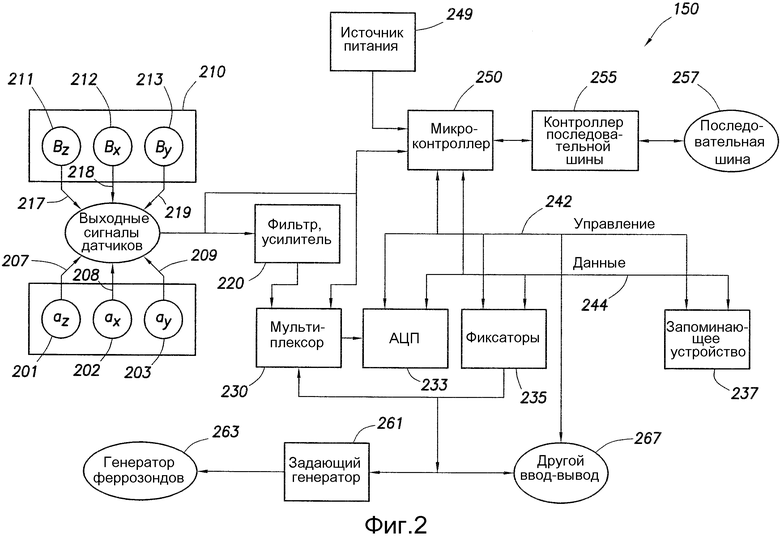
1. Способ определения среднего значения полного магнитного поля во время бурения, содержащий этапы, на которых:
размещают трехосный векторный магнитометр, прикрепляемый к узлу бурильной колонны, при этом трехосный векторный магнитометр выполняют с возможностью измерения трех ортогональных составляющих магнитных полей;
вращают узел бурильной колонны; и
определяют среднее значение (BTwR) полного магнитного поля во время этапа вращения узла бурильной колонны;
причем значение (BTwR) полного магнитного поля вычисляют в соответствии с формулой, выбираемой из группы, состоящей из:
и
где каждый член Bxi, Byi и Bzi соответствует одной из трех ортогональных составляющих магнитных полей.
2. Способ по п. 1, в котором трехосный магнитометр содержит три векторных магнитометра.
3. Способ по п. 2, в котором Bzi соответствует оси вдоль ствола скважины и в котором Bxi и Byi соответствуют оси поперек ствола скважины.
4. Способ по п. 1, в котором среднее вычисляют в соответствии с нижеследующей формулой:
 где каждый член Bxi, Byi и Bzi соответствует одной из трех ортогональных составляющих магнитных полей.
где каждый член Bxi, Byi и Bzi соответствует одной из трех ортогональных составляющих магнитных полей.
5. Способ по п. 2, в котором три векторных магнитометра являются достаточно широкополосными, так что отсутствует значительное ослабление сигнала при максимальной ожидаемой частоте вращения.
6. Способ по п. 1, дополнительно содержащий:
определение векторной составляющей (Bz) магнитного поля вдоль оси ствола скважины; и
определение вычисляемого BAngle(θ) узла бурильной колонны в соответствии с формулой  причем BAngle(θ) представляет собой угол между осью ствола скважины и вектором магнитного поля Земли.
причем BAngle(θ) представляет собой угол между осью ствола скважины и вектором магнитного поля Земли.
7. Способ по п. 6, дополнительно содержащий:
временное прекращение вращения узла бурильной колонны;
измерение наклона и азимута узла бурильной колонны в то время, когда узел бурильной колонны является неподвижным, с тем, чтобы определять исходные стационарные азимут и наклон;
обеспечение вращения узла бурильной колонны во время бурения; и
определение вычисляемого азимута (Azm) во время бурения в соответствии с формулой 
где Inc является наклоном во время бурения, где Dip является отклонением от горизонтали магнитного поля Земли и где BAngle представляет собой вычисляемый BAngle(θ).
8. Способ по п. 7, дополнительно содержащий этап уклонения от пересечения траекторий скважин с использованием вычисляемого Azm для определения направления ствола скважины.
9. Способ по п. 6, дополнительно содержащий этап пересечения скважины с использованием вычисляемого Azm для определения направления ствола скважины.
10. Способ по п. 7, дополнительно содержащий этап использования вычисляемого BAngle(θ) и вычисляемого Azm для одного из уклонения от пересечения траекторий скважин и пересечения скважины.
11. Способ по п. 7, дополнительно содержащий этап вывода значения, на котором значение выбирают из группы, состоящей из BTwR, вычисляемого BAngle(θ), вычисляемого наклона и вычисляемого Azm, при этом этап вывода выбирают из группы, состоящей их сохранения значения в запоминающем устройстве и передачи значения к наземному компьютеру.
12. Способ по п. 1, дополнительно содержащий:
размещение инклинометра, прикрепляемого к узлу бурильной колонны;
измерение наклона с использованием инклинометра;
прекращение на время вращения узла бурильной колонны;
измерение азимута узла бурильной колонны в то время, когда узел бурильной колонны является неподвижным, с тем, чтобы
определять исходный стационарный азимут;
обеспечение вращения узла бурильной колонны во время бурения; и
определение вычисляемого азимута во время бурения в соответствии с формулой  где Inc является наклоном во время бурения и Dip является отклонением от горизонтали магнитного поля Земли.
где Inc является наклоном во время бурения и Dip является отклонением от горизонтали магнитного поля Земли.
13. Способ по п. 1, дополнительно содержащий:
размещение трехосного векторного магнитометра, прикрепляемого к узлу бурильной колонны, при этом трехосный векторный магнитометр выполняют с возможностью измерения трех ортогональных составляющих магнитных полей;
обеспечение вращения узла бурильной колонны;
бурение секции ствола скважины;
определение множества средних полных магнитных полей вдоль секции ствола скважины, при этом средние полные магнитные поля являются средним мгновенных модулей векторов трех ортогональных составляющих магнитных полей во время этапа обеспечения вращения узла бурильной колонны; и
идентификацию присутствия внешнего ферромагнитного материала как участка секции, где средние полные магнитные поля отклоняются от ожидаемого магнитного поля Земли.
14. Способ по п. 13, в котором ожидаемое магнитное поле Земли определяют как стационарное магнитное поле в отсутствие всякого внешнего ферромагнитного материала.
15. Способ по п. 13, дополнительно содержащий:
определение амплитуды и пространственной частоты разности между ожидаемым магнитным полем Земли и средним значением (BTwR) полного магнитного поля на протяжении секции ствола скважины;
сравнение амплитуды и пространственной частоты разностного сигнала с амплитудой и пространственной частотой ожидаемого разностного сигнала от предполагаемого источника на предполагаемом расстоянии с тем, чтобы получать результат сравнения, при этом ожидаемый разностный сигнал представляет оценочные теоретические данные из компьютерной модели; и
оценивание расстояния до внешнего ферромагнитного вещества, соответствующего расстоянию, на котором амплитуда и пространственная частота измеряемого разностного сигнала BTwR являются по существу такими же, как ожидаемого разностного сигнала.
16. Способ по п. 15, в котором внешний ферромагнитный материал соответствует скважинной обсадной колонне или другой бурильной колонне, и этап оценивания расстояния используют для одного из исключения возможности пересечений траекторий скважин и пересечения скважины с объектами.
17. Способ по п. 1, дополнительно содержащий:
размещение трехосного векторного магнитометра, прикрепляемого к узлу бурильной колонны, при этом трехосный векторный магнитометр выполняют с возможностью измерения трех ортогональных составляющих магнитных полей;
обеспечение вращения узла бурильной колонны; и
определение среднего полного магнитного поля (BTwR) как среднего мгновенных модулей векторов трех ортогональных составляющих магнитных полей во время этапа обеспечения вращения узла бурильной колонны;
прекращение на время вращения узла бурильной колонны;
измерение стационарного полного магнитного поля в то время, когда узел бурильной колонны является неподвижным, с тем, чтобы получать измерение стационарного полного магнитного поля; и
сравнение среднего полного магнитного поля (BTwR) с измерением стационарного полного магнитного поля с тем, чтобы определять величину ошибки между полным магнитным полем (BTwR) и измерением стационарного полного магнитного поля.
18. Способ по п. 17, в котором этап измерения стационарного полного магнитного поля содержит измерение стационарного полного магнитного поля независимой аппаратурой для измерения магнитного поля в то время, когда узел бурильной колонны является неподвижным, с тем, чтобы получать измерение стационарного полного магнитного поля.
19. Способ по п. 17, в котором этап измерения стационарного полного магнитного поля содержит измерение стационарного полного магнитного поля трехосным векторным магнитометром в то время, когда узел бурильной колонны является неподвижным, с тем, чтобы получать измерение стационарного полного магнитного поля.
20. Способ по п. 17, в котором этап определения среднего полного магнитного поля (BTwR) осуществляют по существу в отсутствие присутствия внешнего ферромагнитного материала.
| СПОСОБ ИЗГОТОВЛЕНИЯ ВЫПЕЧНОГО ПРОДУКТА (ВАРИАНТЫ), ВЫПЕЧНОЙ ПРОДУКТ (ВАРИАНТЫ), ПРИМЕНЕНИЕ НЕМАЛЬТОГЕННОЙ ЭКЗОАМИЛАЗЫ, УЛУЧШАЮЩАЯ КОМПОЗИЦИЯ ДЛЯ ТЕСТА И ТЕСТО ДЛЯ ВЫПЕЧНОГО ПРОДУКТА | 1999 |
|
RU2225118C2 |
| US 4875014, 17.10.1989 | |||
| US 6411094 B1, 25.06.2002 | |||
| US 4072200, 07.02.1978 | |||
| ФЕРРОЗОНДОВЫЙ СКВАЖИННЫЙ ИНКЛИНОМЕТР | 2005 |
|
RU2291294C1 |

