Предлагаемое изобретение относится к инклинометрии скважин, в частности к решению задачи по определению пространственного положения ствола скважины феррозондовым инклинометром, в том числе в процессе бурения.
При определении параметров пространственного положения ствола скважины для измерения магнитного азимута используются феррозонды, состоящие из триады датчиков напряженности магнитного поля (магнитометров), оси чувствительности которых ортогональны и жестко связаны с корпусом инклинометра.
Показания каждого из магнитометров содержат информацию о проекциях напряженности магнитного поля Земли, величина которых зависит от ориентации осей чувствительности магнитометров относительно вектора напряженности магнитного поля Земли. На базе этой информации определяется азимут ствола скважины в месте нахождения инклинометра.
Известны феррозондовые скважинные инклинометры, которые содержат триаду из трех акселерометров с ортогональными осями чувствительности и триаду ортогональных магнитометров, оси чувствительности которых направлены параллельно осям корпуса инклинометра (Исаченко В.Х. Инклинометрия скважин. М.: Недра, 1987, стр.46). В различных вариантах исполнения они представлены в изобретениях, например, патенты RU №2235200, 2004 г., №2018646, 1994 г., №2204712, 2003 г., патент GB №2370361 А1 (Великобритания, 2003 г.).
Недостатком этих инклинометров являются большие погрешности в измерении магнитного азимута в случае, когда в зоне расположения феррозондов присутствуют элементы конструкции бурильного комплекса, состоящие из ферромагнитных материалов. При наличии помех вследствие намагниченности ферромагнитных элементов бурильного оборудования (забойный агрегат, колонна труб) показания магнитометров искажаются на величину проекций магнитного поля от источников помехи на оси чувствительности магнитометров.
Прототипом предлагаемого феррозондового скважинного инклинометра является устройство для контроля комплекса параметров искривления скважин по а.с. СССР №1208208, 1986 г. В этом устройстве один из магнитометров триады ориентирован по продольной оси корпуса инклинометра, а два других установлены под углом к продольной оси корпуса. Такая компоновка конструкции феррозондового инклинометра затрудняет эффективное использование модуляционного метода разделения полезного сигнала и помехи при повороте корпуса инклинометра по следующим причинам.
Поворот корпуса инклинометра в скважине вокруг продольной оси приводит к тому, что сигналы магнитометров изменяются по гармоническому закону с определенной амплитудой и фазой; при этом среднее значение информативных составляющих вектора напряженности магнитного поля Земли в показаниях магнитометров равно нулю. В то же время воздействие помех от намагниченных элементов бурильной системы направлено вдоль оси бурильной компоновки и не зависит от углов поворота инклинометра в стволе скважины. Поэтому при повороте корпуса инклинометра вокруг продольной оси из показаний магнитометров могут быть выделены параметры смещенной гармоники, в которых содержится информация о помехе, характеризуемой величиной среднего значения гармоники, и о полезном сигнале в виде ее амплитуды.
Аналогичные методы разделения полезного сигнала и постоянной помехи широко используются в технике приборостроения путем модуляции показаний источников информации. Однако для повышения качества определения параметров гармонической и постоянной составляющих суммарного сигнала необходимо, чтобы глубина модуляции измеренного сигнала была максимальной. Это связано с тем, что погрешности при определении параметров вектора напряженности магнитного поля Земли и помех от ферромагнитных элементов бурильной системы, которые вычисляются по показаниям магнитометров, зависят от амплитуды модулированных сигналов и, следовательно, от глубины их модуляции. Но в случае совпадения или параллельности оси чувствительности прибора и оси его поворота амплитуда модулированного сигнала равна нулю. Поэтому модуляция сигналов тех магнитометров, которые установлены под углом к продольной оси корпуса инклинометра, как это сделано в прототипе, позволяет решить эту задачу. Однако модуляция сигналов магнитометра, ориентированного в устройстве прототипа по оси корпуса, практически бесполезна. Для эффективного использования методов модуляции необходимо, чтобы в модулированных сигналах всех магнитометров содержалась информация, позволяющая разделить полезный сигнал и помеху.
Задачей предлагаемого изобретения является повышение точности измерений пространственного положения ствола скважины феррозондовым скважинным инклинометром путем определения и компенсации помех, возникающих в магнитометрах вследствие влияния намагниченных элементов конструкции бурильной компоновки при использовании методов модуляции показаний магнитометров.
Решение поставленной задачи достигается тем, что в предлагаемом устройстве феррозондового скважинного инклинометра третий датчик напряженности магнитного поля установлен перпендикулярно продольной оси корпуса инклинометра.
При такой установке феррозонда в корпусе инклинометра оси чувствительности всех магнитометров триады не параллельны оси поворота инклинометра в стволе скважины.
Устройство предлагаемого феррозондового скважинного инклинометра показано на чертеже.
В прочном немагнитном корпусе 1 цилиндрической формы размещены триада 2 магнитометров с взаимно ортогональными измерительными осями, триада 3 акселерометров, а также электронный блок 4, в котором содержатся источники питания, средства преобразования сигналов акселерометров и магнитометров, устройства обработки и передачи их сигналов.
При этом триада 2 магнитометров установлена в корпусе 1 инклинометра так, что измерительная ось датчика 5 (с осью чувствительности Хm) перпендикулярна продольной оси корпуса 1, а оси магнитометров 6 и 7 (Zm,Ym) повернуты на некоторый угол λ относительно плоскости, образованной продольной осью корпуса Z и осью чувствительности датчика 5.
Устройство функционирует следующим образом.
Корпус 1 инклинометра вместе с колонной бурильных труб поворачивается в скважине вокруг своей продольной оси (приблизительно на один оборот). При этом вместе с показаниями магнитометров триады 2 фиксируются углы поворота инклинометра относительно плоскости горизонта, определяемые с помощью акселерометров триады 3.
Массив полученных данных отражает периодическую зависимость показаний магнитометров от угла поворота инклинометра. По этим данным в блоке 4 вычисляются средние значения периодических функций, которые характеризуют величины проекций магнитных помех на измерительные оси феррозонда с магнитометрами 5-7. Эти величины поступают в память вычислительного устройства, где они хранятся до следующего режима определения помех, генерируемых ферромагнитными элементами бурильной системы.
Угол разворота λ осей чувствительности магнитометров 6 и 7 относительно продольной оси корпуса инклинометра целесообразно делать близким 45°, поскольку при этом модуляция сигналов магнитометров 6 и 7 полем Земли вследствие вращения инклинометра вокруг своей продольной оси вместе с колонной бурильных труб и забойным агрегатом оказывается достаточно глубокой и практически одинаковой для обоих магнитометров, что обеспечивает повышение точности определения составляющих магнитных помех.
При измерении магнитного азимута из показаний магнитометров вычитаются значения определенных выше магнитных помех и таким образом находятся проекции на измерительные оси феррозонда напряженности магнитного поля Земли ( ,
, ,
, ). Затем путем преобразования координат вычисляются проекции напряженности магнитного поля Земли на оси инклинометра OXYZ, связанные с его корпусом:
). Затем путем преобразования координат вычисляются проекции напряженности магнитного поля Земли на оси инклинометра OXYZ, связанные с его корпусом:



Далее по найденным величинам проекций магнитного поля Земли на оси инклинометра значение магнитного азимута вычисляется по известному алгоритму (Исаченко В.Х. Инклинометрия скважин. М.: Недра, 1987).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКВАЖИННОЙ ИНКЛИНОМЕТРИИ И СКВАЖИННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2770874C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО АЗИМУТА В СКВАЖИННОМ ИНКЛИНОМЕТРЕ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2290673C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО АЗИМУТА В СКВАЖИННОМ ИНКЛИНОМЕТРЕ В ПРОЦЕССЕ БУРЕНИЯ | 2014 |
|
RU2586341C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО АЗИМУТА В ПРОЦЕССЕ БУРЕНИЯ | 2009 |
|
RU2387827C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОРИЕНТАЦИИ СТВОЛА СКВАЖИНЫ В ПРОЦЕССЕ БУРЕНИЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2001 |
|
RU2204017C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
Изобретение относится к области инклинометрии скважин, в частности к определению пространственного положения ствола скважины феррозондовым инклинометром. Техническим результатом изобретения является обеспечение наибольшей глубины модуляции сигналов магнитометров при повороте корпуса инклинометра вокруг продольной оси для разделения помехи, вызванной влиянием намагниченных элементов бурильной компоновки, и полезного сигнала о магнитном азимуте ствола скважины. Для этого инклинометр содержит жестко связанные с немагнитным корпусом триады взаимно ортогональных акселерометров и триады взаимно ортогональных датчиков напряженности магнитного поля. При этом два датчика установлены под углом к продольной оси корпуса и повернуты относительно плоскости, образованной продольной осью корпуса и осью чувствительности третьего датчика на угол, близкий 45°. Третий датчик расположен перпендикулярно продольной оси корпуса. Такое расположение магнитометров позволяет повысить точность измерений пространственного положения ствола скважины. 1 ил.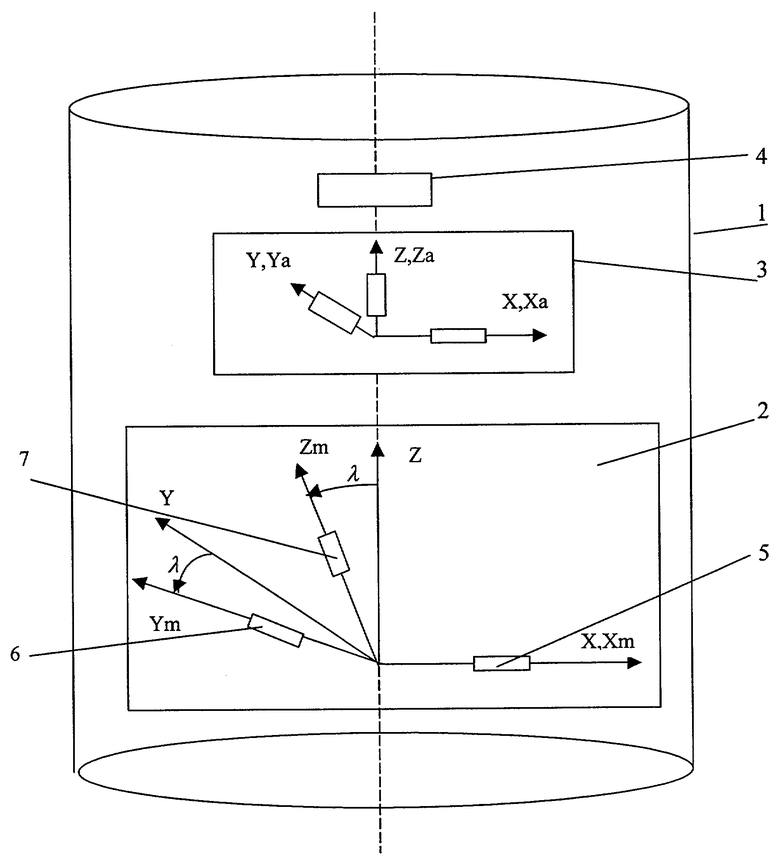
Феррозондовый скважинный инклинометр, содержащий немагнитный корпус и жестко связанные с ним триаду акселерометров и триаду взаимно ортогональных датчиков напряженности магнитного поля, в которой два датчика установлены под углом к продольной оси корпуса, и соединенный с ними электронный блок, отличающийся тем, что третий датчик напряженности магнитного поля установлен перпендикулярно продольной оси корпуса, а два других датчика повернуты относительно плоскости, образованной продольной осью корпуса и осью чувствительности третьего датчика на угол, близкий 45°.
| Устройство для контроля комплекса параметров искривления скважин | 1984 |
|
SU1208208A1 |
| Прибор для определения напора жидкости в потоке | 1948 |
|
SU78184A1 |
| Феррозондовый датчик азимута | 1982 |
|
SU1025877A1 |
| ДАТЧИК МАГНИТНОГО АЗИМУТА | 1990 |
|
RU2018646C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ОРИЕНТАЦИИ СКВАЖИНЫ И ИНКЛИНОМЕТР | 2003 |
|
RU2253838C2 |
| US 4987684 A, 29.01.1991 | |||
| БРИТВА ДЛЯ СУХОГО БРИТЬЯ | 2007 |
|
RU2370361C2 |
| ИСАЧЕНКО В.Х | |||
| и др | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987, с.46. | |||

