Изобретение относится к измерительным устройствам, которые могут использоваться для осмотра и освидетельствования колесных пар вагонов железных дорог.
Система контроля износа вагонных колесных пар может быть установлена в пунктах подготовки вагонов к перевозкам и перед постановкой в поезд, а также в других местах, где правилами предусмотрен осмотр колесных пар под вагонами.
Для контроля износа вагонных колесных пар используются измерительный инструмент и шаблоны, перечень которых устанавливается Министерством путей сообщения. Контроль выполняется, в основном, вручную, поэтому является трудоемким и длительным по времени.
Наиболее близким устройством по своей технической сущности к заявляемому является бесконтактный трехкоординатный измеритель по патенту РФ на изобретение N2191348, который содержит формирующий зондовую световую линию на поверхности объекта измерения осветительный узел, двухканальную оптическую приемную проекционную систему, ПЗС-матрицу и преобразовательно-вычислительный блок, на вход которого включен выход ПЗС-матрицы. ПЗС-матрица установлена на оптической оси проекционного объектива двухканальной оптической приемной системы, которая снабжена двумя пентапризмами и зеркально-призменным разделительным узлом. Осветительный узел содержит расположенные на общей оптической оси цилиндрическую линзу, объектив и лазерный диод, установленный в фокальной плоскости объектива. Преобразовательно-вычислительный блок содержит персональный компьютер, видеокарту, выход которой подключен к входу персонального компьютера, и усилитель, выход которого включен на вход видеокарты, а его выход соединен с выходом ПЗС-матрицы.
Недостатком устройства являются его ограниченные возможности, связанные с необходимостью последовательного измерения координат точек движущегося объекта, что усложняет структуру преобразовательно-вычислительного блока при измерении объектов, имеющих сложную пространственную конфигурацию.
Задачей предлагаемого устройства является расширение его функциональных возможностей, в результате чего осуществляется измерение следующих параметров колесных пар:
- расстояние между внутренними гранями бандажей,
- разность размеров между верхними и нижними точками внутренних граней бандажей,
- толщина обода по кругу катания колес,
- толщина бандажей по кругу катания,
- диаметр бандажей по кругу катания,
- наибольшая разница в диаметрах бандажей по кругу катания колесных пар одной тележки и колесных пар разных тележек одного вагона,
- овальность бандажей по кругу катания,
- ширина бандажей,
- толщина гребня бандажей,
- разница в толщине гребней у одной колесной пары,
- угловой подрез гребня бандажа,
- выкрашивания на поверхности катания бандажей, расположенные на расстоянии не менее 100 мм друг от друга по окружности, площадью более 200 кв. мм и глубиной более 1 мм.
Это достигается тем, что система контроля износа вагонных колесных пар, содержащая оптическую приемную проекционную систему и преобразовательно-вычислительный блок, отличается тем, что она снабжена датчиком положения и счетчиком вагонов, выходы которых подключены на входы преобразовательно-вычислительного блока. Оптическая приемная прекционная система выполнена из набора стереомодулей, жесткая конструкция каждого из которых содержит две телевизионные ПЗС-камеры и осветительный узел; выходы стереомодулей включены на соответствующие входы преобразовательно-вычислительного блока, причем стереомодули жестко установлены относительно друг друга.
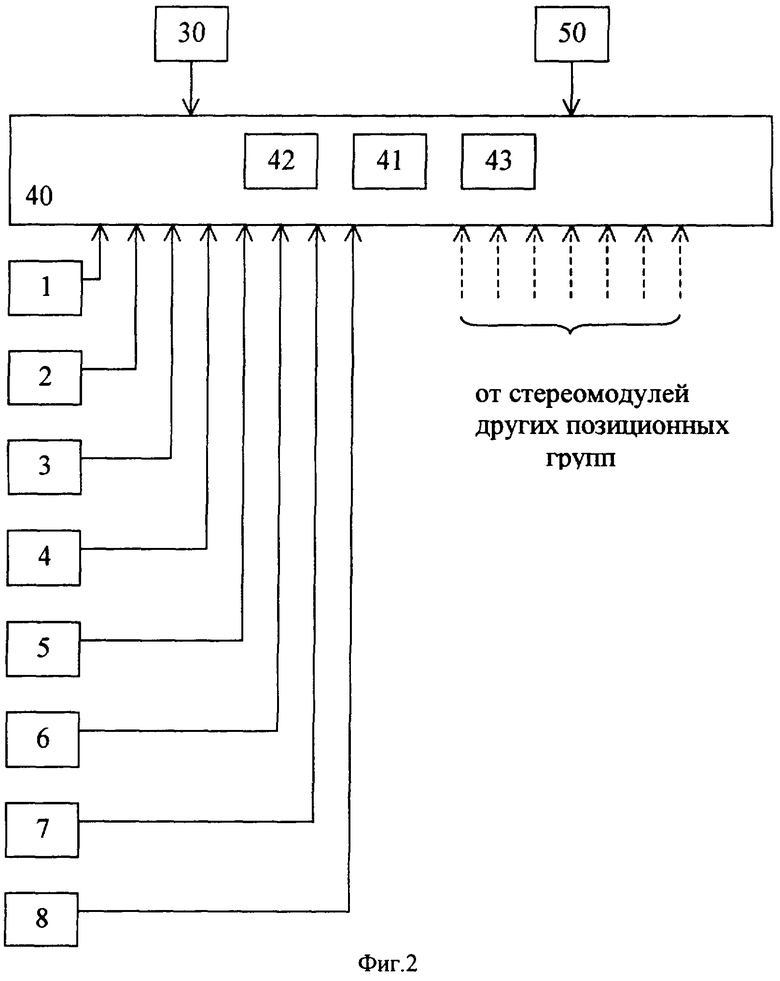
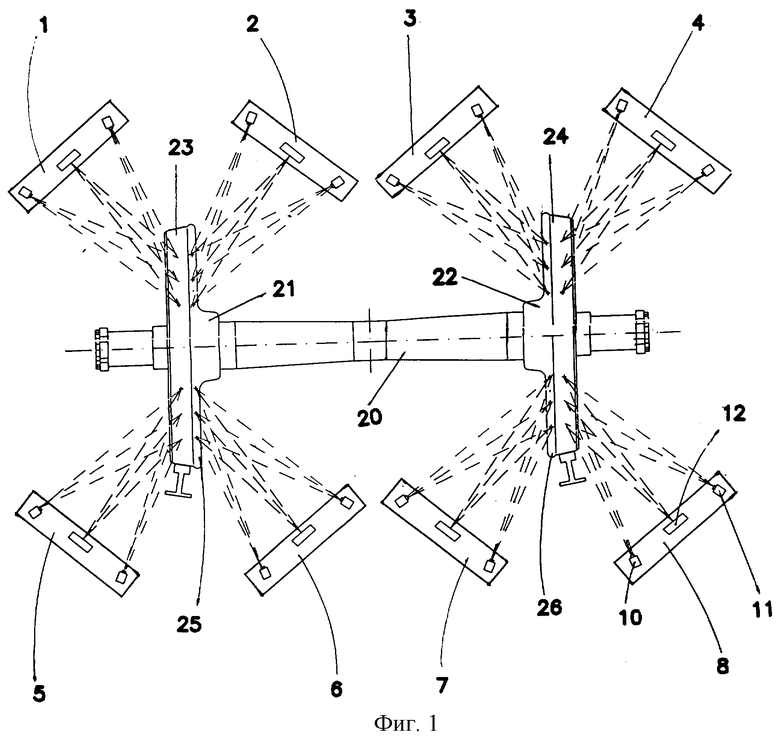
Прилагаемые иллюстрации поясняют суть устройства. На фиг.1 показано расположение компонентов позиционной группы модулей системы контроля относительно колесной пары. На фиг.2 представлена блок-схема системы контроля износа вагонных колесных пар.
Система контроля износа вагонных колесных пар содержит оптическую приемную проекционную систему и преобразовательно-вычислительный блок. Из соображений удобства монтажа и эксплуатации набор стереомодулей оптической проекционной системы выполняется в виде позиционных групп (фиг.1). Отдельный стереомодуль 1-8 выполнен в виде жесткой конструкции, состоящей из двух телевизионных ПЗС-камер 10 и 11 и осветительного узла 12. Осветительный узел 12 может быть выполнен на базе твердотельных лазерных излучателей.
Каждая позиционная группа содержит 8 стереомодулей и обеспечивает одновременное получение 8 стереоизображений участков поверхности колес 21 и 22 одной колесной пары 20. Спереди и сзади по ходу движения на каждое колесо колесной пары “смотрят” два стереомодуля. Каждый стереомодуль 1-8 обеспечивает наблюдение своего участка поверхности колеса и, кроме того, пара стереомодулей 1 и 4, 5 и 8, стоящих спереди или сзади по отношению к каждому колесу 21 и 22, обеспечивают получение описания трехмерной поверхности гребней 23 и 24 колес 21 и 22, а каждая пара внутренних стереомодулей 2 и 3, 6 и 7 обеспечивают измерение взаимного пространственного положения внутренних поверхностей 25 и 26 колес 21 и 22 колесной пары 20. Стереомодули 1-8 в позиционной группе устанавливаются жестко относительно друг друга, на отвязанном от рельсового пути едином основании. Взаимное положение модулей 1-8 фиксируется при юстировке и калибровке и должно быть неизменным на период между калибровками, например, в течение нескольких суток.
Для обеспечения возможности сведения в единую координатную систему результатов измерений, получаемых с помощью отдельных стереомодулей, предназначен модуль опорных систем координат (на фиг.2 не показан). Этот модуль используется только при калибровке и периодической проверке устройства и не принимает участия в процессе контроля колесных пар.
Система контроля износа вагонных колесных пар содержит несколько позиционных групп стереомодулей. Количество позиционных групп и их пространственное расположение вдоль железнодорожного пути таковы, что они обеспечивают последовательно по мере продвижения вагона контроль всей поверхности колес каждой колесной пары 20. В суммарном поле зрения оптической приемной проекционной системы присутствует полное изображение колесной пары 20.
Например, при использовании в стереомодулях камер с числом элементов 1300×1000 поле зрения одного стереомодуля по ободу колеса составит около 300 мм. Длина окружности колеса по поверхности катания около 3000 мм. Поскольку в каждой группе на каждое колесо приходится два стереомодуля для наблюдения поверхности катания спереди и сзади, то для контроля колес в целом потребуется 5-6 позиционных групп стереомодулей.
Работает устройство следующим образом. Момент съемки для получения изображений задается датчиком положения 30 (фиг.2), который состоит из излучающего светодиода и приемного фотодиода и срабатывает, когда колесная пара 20 в процессе перемещения по рельсам занимает положение, в котором должна быть произведена съемка. В этот момент открываются затворы всех ПЗС-камер 10 и 11 стереомодулей 1-8, и включаются осветительные узлы 12. Осветительные узлы 12 стереомодулей 1-8 формируют на поверхностях колесной пары точечные и штриховые пятна. Размеры световых пятен, их количество и расположение на наблюдаемой части поверхности колеса определяются формой поверхности и требуемой точностью измерения, а также требованиям возможности идентификации отдельных пятен в правом и левом изображении стереопары. Время экспозиции зависит от скорости перемещения вагона и требуемого разрешения (допустимого смаза изображения).
Например, при скорости вагона 3,6 км/час и точности измерений 0,5 мм время экспозиции составляет около 100 мксек. Пара изображений каждого стереомодуля 1-8 вводится в преобразовательно-вычислительный блок 40, где они обрабатываются с целью определения координат центров световых пятен в каждом изображении. Преобразовательно-вычислительный блок 40 состоит из компьютера 41 и интерфейсных блоков 42 и 43. Совместный анализ изображений стереопары позволяет получить пространственное описание участка поверхности колесной пары 20, задаваемое набором пространственных координат точек поверхности, обмеряемой части колеса. Сопоставление полученного описания с эталонным описанием, введенным в компьютер 41 преобразовательно-вычислительного блока 40, с учетом допусков, позволяет судить о пригодности колеса (соответствии его заданным требованиям). Это относится как к поверхностям 25 и 26 колес 21 и 22, так и к поверхностям гребней 23 и 24, а также и к взаимному положению внутренних поверхностей двух колес 21 и 22 колесной пары 20. Поскольку производится сравнение пространственных описаний участков поверхности, то это сравнение устойчиво к колебаниям масштаба изображений вследствие погрешности момента съемки из-за неточности определения этого момента.
Сигнал для ввода изображений формируется датчиком положения 30, который фиксирует момент нахождения колесной пары 20 в зоне наблюдения позиционной группы стереомодулей. Обработка и анализ стереоизображений позволяют составить пространственное описание наблюдаемых частей поверхности колесной пары 20 в единой для всех восьми модулей пространственной системе координат.
Поскольку одна позиционная группа стереомодулей обеспечивает наблюдение лишь около 20% поверхности колес по кругу катания, то вдоль рельсового пути должно быть установлено несколько таких групп модулей. Все остальные позиционные группы стереомодулей соединены с преобразовательно-вычислительным блоком 40 аналогично описанному для первой. Расстояние между группами должно быть таким, чтобы в поле зрения последующей группы попадала малая часть поверхности колес, наблюдавшаяся уже предыдущими группами, а сами расстояния должны быть известны.
Кроме того, в системе установлен счетчик 50 вагонов, который фиксирует прохождение каждого вагона через измерительный участок. На входе счетчика 50 установлен триггер, на один вход которого с датчика положения 30 поступает импульс при въезде вагона на начало контрольного участка, а сбрасывается триггер другим импульсом датчика положения 30 при прохождении вагоном конца контрольного участка.
Расстояния между внутренними гранями бандажей и разность размеров между верхними и нижними точками внутренних граней бандажей определяются из сопоставления результатов измерения правых и левых внутренних модулей во всех группах. Толщина обода по кругу катания колес, толщина, ширина и диаметр бандажей по кругу катания, выкрашивания на поверхности катания бандажей, угловой подрез гребня бандажа определяются по результатам измерений внешних модулей. Толщина гребня определяется по совместным результатам измерений внешних и внутренних модулей. Овальность бандажей по кругу катания, разница в толщине гребней у одной колесной пары, а также наибольшая разница в диаметрах бандажей по кругу катания колесных пар одной тележки и колесных пар разных тележек одного вагона вычисляются по результатам измерений всех групп модулей. Моделирование системы контроля износа вагонных колесных пар показало ее высокую эффективность.
Преимуществами предлагаемой системы являются высокие точность и скорость измерений, объективность получаемых результатов, бесконтактный метод, отсутствие необходимости точного позиционирования объекта относительно системы наблюдения, возможность составления описания в координатной системе объекта (колесной пары). Протоколы измерений могут быть выведены на печатающее устройство.
Использование предлагаемых бесконтактных измерений в трехмерном пространстве перспективны благодаря прогрессу прикладных средств вычислительной техники, массовому производству дешевых матричных преобразователей свет-сигнал с жесткой геометрией растра, появлению дешевых твердотельных лазерных диодов.
Многоракурсная бесконтактная высокоточная производительная измерительная система обеспечивает наблюдение объекта измерения со всех необходимых направлений и сведение результатов измерений, выполняемых отдельными стереомодулями, в единую систему координат. Это позволяет обмерять изделия произвольной формы, а также обмерять с высокой точностью крупногабаритные изделия, размеры которых превосходят размеры зоны измерения отдельного стереомодуля.
Система контроля износа вагонных колесных пар содержит оптическую приемную проекционную систему и преобразовательно-вычислительный блок. Также присутствует датчик положения и счетчик вагонов, выходы которых подключены на входы преобразовательно-вычислительного блока. Оптическая приемная проекционная система выполнена из набора стереомодулей, жесткая конструкция каждого из которого содержит две телевизионные ПЗС-камеры и осветительный узел, выходы стереомодулей включены на соответствующие входы преобразовательно-вычислительного блока, причем стереомодули жестко установлены относительно друг друга. Технический результат - расширение функциональных возможностей. 2 з.п. ф-лы, 2 ил.
| БЕСКОНТАКТНЫЙ ТРЕХКООРДИНАТНЫЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2191348C2 |
| Устройство для сборки резьбовых соединений | 1984 |
|
SU1184640A1 |
| US 6400451 A, 04.06.2002 | |||
| СПОСОБ БЕСКОНТАКТНОГО ДИНАМИЧЕСКОГО КОНТРОЛЯ ИЗНОСА КОЛЕС ПОДВИЖНОГО СОСТАВА | 1998 |
|
RU2147729C1 |

