Изобретение относится к радионавигации и может использоваться в навигационной системе летательного аппарата (ЛА), применяемой для определения ориентации относительно земли, например, при заходе ЛА на посадку по приборам.
Известны способы и устройства измерения угла крена ЛА, основанные на использовании инерциальных систем навигации, в частности гироскопических систем ориентации [1-4]. Способам измерения ориентации, основанным на применении инерциальных систем навигации, и устройствам, используемым для их реализации, свойственны недостатки. Во-первых, погрешность инерциальных систем увеличивается пропорционально продолжительности полета, происходит постоянное накапливание погрешности измерений. В течение одного часа полета накопленная погрешность может составлять единицы градусов [2-3]. Во-вторых, погрешность инерциальных систем зависит от величин ускорений, действующих на ЛА. Так, если на ЛА воздействуют значительные перегрузки, то происходит увеличение собственной скорости прецессии гироскопа, что в ряде случаев может привести к полной потере его работоспособности [2].
Известен способ-прототип измерения угла крена летательного аппарата [5] при его движении на источник излучения электромагнитных волн, в котором из точки с известными координатами излучают горизонтально линейно-поляризованные электромагнитные волны, вектор напряженности электрического поля 
Недостатком способа-прототипа является возникновение погрешности измерения угла крена в случае отклонения частоты Ω от номинального (заданного значения частоты) и накопление этой погрешности с течением времени, причем погрешность определения угла увеличивается пропорционально продолжительности полета.
Задача, на решение которой направлено заявленное изобретение, состоит в возможности обеспечения высокой точности измерения угла крена при длительном полете летательного аппарата.
Технический результат, достигаемый заявленным изобретением, заключается в снижении погрешности измерения угла крена.
Сущность заявляемого способа измерения угла крена ЛА заключается в следующем.
Из точки с известными координатами излучают вертикально (возможно и горизонтально, но при вертикальной меньше искажения от взаимодействия с земной поверхностью) линейно-поляризованные электромагнитные волны, вектор напряженности электрического поля
Пусть на борту ЛА установлена приемная антенна, которая предназначена для приема электромагнитных волн в собственном линейном ортогональном поляризационном базисе. При этом единичные орты поляризационного базиса образуют оси декартовой прямоугольной системы координат, которая связана с корпусом ЛА. Единичные орты поляризационного базиса и связанная система координат ЛА подвижны относительно неподвижной наземной системы координат.
Приемная антенна ЛА принимает вертикально линейно-поляризованные электромагнитные волны, излучаемые наземным источником, и установлена таким образом, что при отсутствии угла крена ЛА направление осей подвижной и неподвижной прямоугольных систем координат совпадает. Возникновение угла крена ЛА приводит к повороту в связанной системе координат (подвижной системы) вектора напряженности электрического поля
С выходом приемной антенны связаны два устройства, предназначенные для вращения плоскости поляризации, называемые в дальнейшем изложении вращателями плоскости поляризации. Углы поворота плоскости поляризации вращателей равны по абсолютной величине, но противоположны по знаку, т.е. вращатели поворачивают плоскость поляризации в противоположных направлениях. При использовании вращателей, один из которых поворачивает плоскость поляризации на 45 град., а другой на -45 град., угол между двумя плоскостями поляризации на выходе двух вращателей составляет 90 град. В качестве вращателей могут применяться устройства, предназначенные для вращения плоскости поляризации, описанные в работе [6, стр.337].
Плоскости не являются коллинеарными. Угол между плоскостями поляризации следует выбирать с учетом эксцентриситета эллипса поляризации сигнала, излучаемого наземным передатчиком.
Сигналы с выхода каждого вращателя плоскости передают в бортовую цифровую вычислительную машину (БЦВМ), в которой осуществляют измерение значений амплитуд сигналов. При отсутствии угла крена значения обеих амплитуд совпадают, при появлении угла крена значения отличаются. В БЦВМ осуществляют сравнение измеренных значений амплитуды на выходах вращателей и определяют угол крена ЛА путем использования априорной зависимости, связывающей угол крена и значения амплитуд на выходах вращателей. В качестве априорной зависимости, необходимой для реализации способа, может применяться, например, априори полученные следующие виды зависимости: однопараметрические зависимости угла крена от разности амплитуд, отношения амплитуд, логарифма отношения амплитуд; двухпараметрические зависимости угла крена от значений амплитуд, логарифмов значений амплитуд.
Основными признаками, отличающими заявленный способ от способа-прототипа, являются:
- получение на борту ЛА сигнала наземного передатчика в двух плоскостях поляризации, развернутых друг относительно друга на некоторый угол, значение которого не изменяется в процессе полета ЛА;
- определение угла крена ЛА по значениям амплитуды сигналов, принятых в двух плоскостях.
Из описания заявленного изобретения следует, что техническими достоинствами заявленного изобретения являются:
1) отсутствие накопления со временем погрешности, связанной с неточностью частоты Ω вращения плоскости поляризации;
2) более высокое быстродействие по сравнению с прототипом, т.к. для определения угла крена не требуется интегрирование принимаемого сигнала по времени;
3) упрощение алгоритма определения угла крена по сравнению с алгоритмом способа-прототипа, что позволяет технически упростить устройство, реализующее заявленный способ, по сравнению с устройством для реализации способа-прототипа.
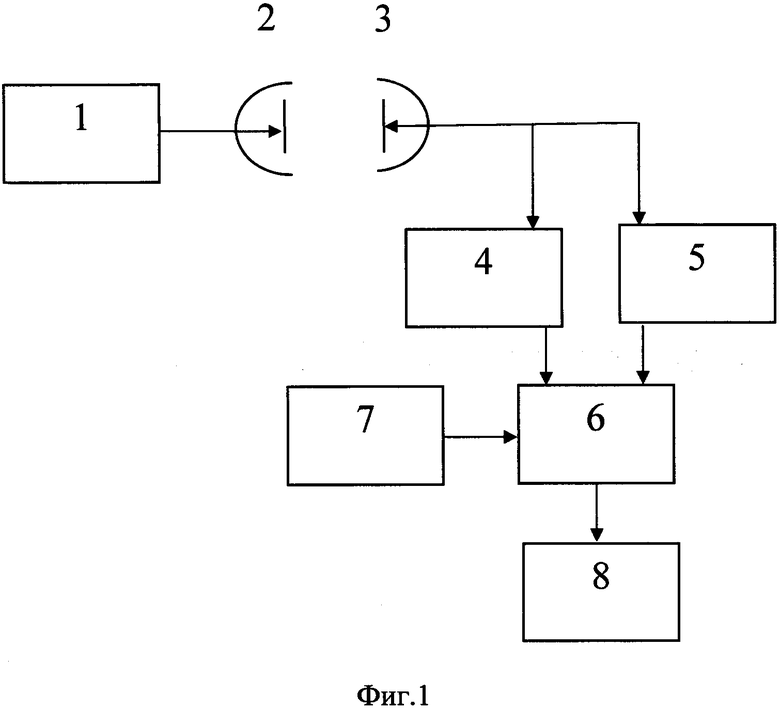
Блок-схема устройства, предназначенного для осуществления заявленного способа, представлена на фигуре 1.
Устройство содержит передатчик 1 и передающую антенну 2, расположенные в точке с известными координатами. На борту ЛА устройство содержит приемную антенну 3, первый вращатель плоскости поляризации 4, второй вращатель плоскости поляризации 5, бортовую цифровую вычислительную машину (БЦВМ) 6, блок хранения априорной зависимости 7, связывающей угол крена и значения разности амплитуд на выходах вращателей, устройство индикации угла крена 8. Первый вход БЦВМ соединен с выходом первого вращателя 4, второй вход БЦВМ соединен с выходом второго вращателя 5, третий вход БЦВМ соединен с выходом блока хранения 7.
В качестве вращателей плоскости поляризации 4 и 5 для вращения плоскости поляризации сигнала, поступающего с выхода приемной антенны 3, могут применяться устройства, приведенные в работе [6, стр.337].
Устройство работает следующим образом.
Передатчик 1 через передающую антенну 2, расположенную в точке с известными координатами, излучает в направлении ЛА линейно-поляризованные электромагнитные волны, вектор напряженности электрического поля которых совпадает с вертикальной плоскостью.
Антенна 3 на борту ЛА принимает электромагнитные волны. С выхода приемной антенны 3 сигнал поступает на входы первого вращателя плоскости поляризации 4 и второго вращателя плоскости поляризации 5. Сигналы с выхода первого вращателя 4 и второго вращателя 5 поступают в БЦВМ 6, в которой осуществляют измерение значений амплитуд сигнала на выходе вращателей 4 и 5. Параметры, характеризующие априорную зависимость угла крена ЛА от значений амплитуд на выходах вращателей, поступают из блока 7 на третий вход БЦВМ 6. По значениям амплитуд на выходе вращателей 4, 5 в БЦВМ 6 определяют угол крена ЛА путем использования априорной зависимости, связывающей угол крена и значения амплитуд на выходах вращателей 4, 5.
Полученное значение угла крена поступает на устройство индикации угла крена 8.
Основной технический результат, достигаемый заявленным изобретением, заключается в снижении погрешности измерения угла крена.
Из последовательности действий, необходимой для осуществления способа, следует, что заявленный способ может быть использован при определении угла крена летательного аппарата и многократно воспроизведен.
Литература
1. Александров А.С., Арно Г.Р. и др. Современное состояние и тенденции развития зарубежных средств и систем навигации подвижных объектов военного и гражданского назначения. - СПб., 1994. - 119 с.
2. Пельпор Д.С., Ягодкин В.В. Гироскопические системы. - М.: Высшая школа, 1977. - 216 с.
3. Агаджапов П.А., Воробьев В.Г. и др. Автоматизация самолетовождения и управления воздушным движением. - М.: Транспорт, 1980. - 357 с.
4. Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь, 1985. - 344 с.
5. Гулько В.Л. Патент №2475862 RU, МПК G08G 5/02. Способ измерения угла крена летательного аппарата и устройство для его реализации, заявлено 04.08.2011, опубл. 20.02.2013, бюл.№5.
6. Канарейкин Д.Б., Павлов Н.Ф. Потехин В.А. Поляризация радиолокационных сигналов. М.: «Светское радио», 1966. 440 с.
Изобретение относится к радионавигации и может использоваться в навигационной системе летательного аппарата (ЛА), применяемой для определения ориентации относительно земли, например, при заходе ЛА на посадку по приборам. Достигаемый технический результат - снижение погрешности измерения угла крена. Указанный результат достигается за счет того, что из точки с известными координатами излучают линейно-поляризованные электромагнитные волны, вектор напряженности электрического поля которых совпадает с вертикальной плоскостью, приемная антенна на борту летательного аппарата принимает электромагнитные волны, сигнал с выхода приемной антенны поступает на два вращателя плоскости поляризации, углы поворота плоскости поляризации которых равны по абсолютной величине, но противоположны по направлению поворота, сигналы с выхода каждого вращателя плоскости передают в бортовую цифровую вычислительную машину, в которой осуществляют измерение значений амплитуд сигналов и определяют угол крена летательного аппарата путем использования априорной зависимости, связывающей угол крена и значения амплитуд на выходе вращателей. 1 ил.
Способ измерения угла крена летательного аппарата, заключающийся в том, что из точки с известными координатами излучают линейно-поляризованные электромагнитные волны, вектор напряженности электрического поля которых совпадает с вертикальной плоскостью, приемная антенна на борту летательного аппарата принимает электромагнитные волны, отличающийся тем, что сигнал с выхода приемной антенны поступает на два вращателя плоскости поляризации, углы поворота плоскости поляризации которых равны по абсолютной величине, но противоположны по направлению поворота, сигналы с выхода каждого вращателя плоскости передают в бортовую цифровую вычислительную машину, в которой осуществляют измерение значений амплитуд сигналов и определяют угол крена летательного аппарата путем использования априорной зависимости, связывающей угол крена и значения амплитуд на выходе вращателей.
| СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2475862C1 |

