Изобретение относится к радионавигации и может использоваться в пилотажно-навигационных системах ориентации летательного аппарата (ЛА), например, при заходе на посадку по приборам.
Известные способы и устройства измерения угла крена ЛА основаны на использовании инерциальных систем навигации, в частности гироскопических систем ориентации [1-4]. Таким способам измерения и устройствам, их реализующим, присущ ряд недостатков. Во-первых, с течением времени происходит постоянное накапливание ошибки измерений и за один час полета она составляет величину единицы градусов [2-3]. Во-вторых, если ЛА развивает значительные перегрузки, то происходит увеличение собственной скорости прецессии гироскопа, что в ряде случаев может привести к полной потере его работоспособности [2].
Поскольку известные способы измерения угла крена ЛА и устройства, их реализующие, основаны на другом физическом принципе, по сравнению с заявляемым, то они не могут рассматриваться в качестве аналогов, так как не имеют общих признаков.
Сущность заявляемого способа измерения угла крена ЛА заключается в следующем.
Из точки с известными координатами излучают горизонтально линейно-поляризованные электромагнитные волны, вектор напряженности электрического поля  которых совпадает с горизонтальной плоскостью. И совместно с нормалью к этой плоскости образуют неподвижную декартовую прямоугольную систему координат.
которых совпадает с горизонтальной плоскостью. И совместно с нормалью к этой плоскости образуют неподвижную декартовую прямоугольную систему координат.
На борту ЛА приемная антенна принимает электромагнитные волны в собственном линейном ортогональном поляризационном базисе, единичные орты которого совпадают с вертикальной и поперечной осями ЛА соответственно и таким образом образуют связанную с корпусом ЛА подвижную декартовую прямоугольную систему координат. Очевидно, когда угол крена ЛА отсутствует, то подвижная и неподвижная декартовые прямоугольные системы координат совпадают по направлению. В противном случае указанные системы координат не совпадают. Таким образом, возникновение угла крена ЛА одновременно приводит к повороту вектора напряженности электрического поля  принимаемых на борту ЛА электромагнитных волн, или, иначе говоря, одновременно изменяется ориентация плоскости поляризации принимаемых сигналов.
принимаемых на борту ЛА электромагнитных волн, или, иначе говоря, одновременно изменяется ориентация плоскости поляризации принимаемых сигналов.
Вращение с частотой Ω собственной линейной поляризации приемной антенны приводит к амплитудной модуляции с частотой 2Ω принятых сигналов. Выделение из принятого сигнала спектральной составляющей на частоте 2Ω и измерение ее фазы относительно углового положения собственной линейной поляризации приемной антенны позволит измерить угол крена ЛА.
Установим связь между амплитудой и фазой спектральной составляющей на частоте 2Ω и углом крена ЛА.
Для установления этой связи воспользуемся известным [5-8] формализмом векторов и матриц Джонса.
Тогда сигнал на входе приемника в собственном линейном ортогональном поляризационном базисе можно получить с помощью преобразований вида:

где  - вектор Джонса излучаемой горизонтально линейно-поляризованной волны, записанный в декартовом линейном поляризационном базисе,
- вектор Джонса излучаемой горизонтально линейно-поляризованной волны, записанный в декартовом линейном поляризационном базисе,
 - оператор поворота на угол крена ±γ,
- оператор поворота на угол крена ±γ,
+γ - положительный угол крена (правое крыло, или поперечная ось ЛА, находится ниже горизонтальной плоскости),
-γ - отрицательный угол крена (правое крыло, или поперечная ось ЛА, находится выше горизонтальной плоскости),
 - оператор вращателя плоскости поляризации на угол α=Ωt
- оператор вращателя плоскости поляризации на угол α=Ωt
(Ω - частота вращения),
 - оператор поляризатора (переход с круглого волновода на прямоугольный с горизонтальной собственной поляризацией),
- оператор поляризатора (переход с круглого волновода на прямоугольный с горизонтальной собственной поляризацией),
С - постоянная величина, учитывающая потенциал передатчика, расстояние от передатчика до летательного аппарата, чувствительность приемника.
Проделав в (1) необходимые матричные преобразования, получим:

Амплитуда сигнала на выходе приемника, имеющая логарифмическую амплитудную характеристику и линейный детектор, с учетом α=Ωt, будет равна:

Из анализа (3) видим, что в спектре огибающей выходного сигнала логарифмического приемника присутствует только спектральная составляющая на частоте 2Ω и ее фаза φ2Ω определяется только углом крена ЛА независимо от мощности передатчика, расстояния от передатчика до ЛА и чувствительности приемника.
Амплитуда этой спектральной составляющей может быть найдена как

или с учетом (3) и известного соотношения

а также с учетом того, что уровень сигнала при наличии логарифмического приемника обычно измеряют в децибелах, получим, что амплитуда спектральной составляющей максимальна и равна

а ее фаза φ2Ω с учетом (3) связана с углом крена γ ЛА соотношением:

Использование заявляемой совокупности признаков для измерения угла крена ЛА в известных решениях автором не обнаружено.
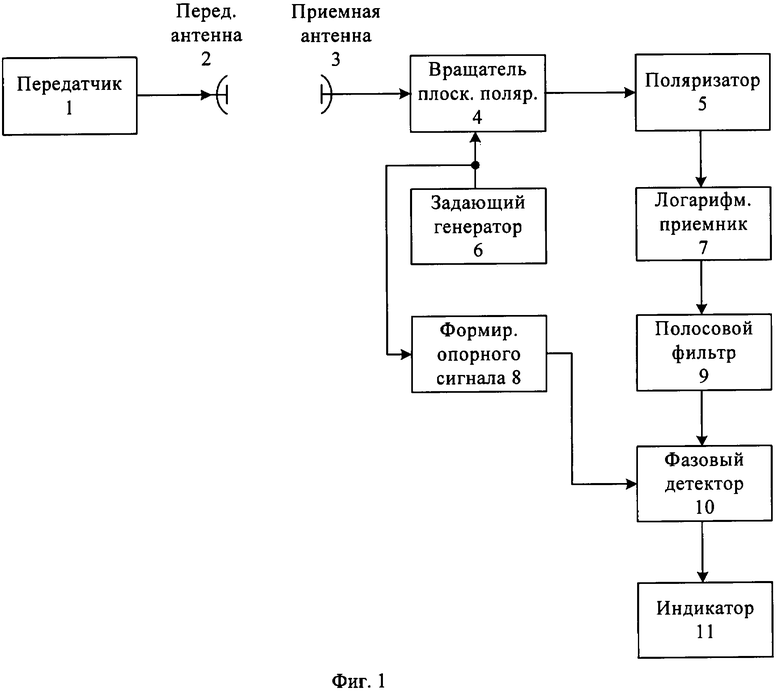
На фиг.1 представлена структурная электрическая схема устройства, реализующего предложенный способ измерения угла крена ЛА.
Устройство содержит передатчик 1 и передающую антенну 2, расположенные в точке с известными координатами. На борту ЛА устройство содержит приемную антенну 3, вращатель плоскости поляризации 4, поляризатор 5, задающий генератор 6, логарифмический приемник 7, формирователь опорного сигнала 8, полосовой фильтр 9, фазовый детектор 10, индикатор 11.
Устройство работает следующим образом.
Передатчик 1 через передающую антенну 2, расположенные в точке с известными координатами, излучает в направлении ЛА горизонтально линейно поляризованные электромагнитные волны, вектор напряженности электрического поля  которых совпадает с горизонтальной плоскостью.
которых совпадает с горизонтальной плоскостью.
На борту ЛА электромагнитные волны принимаются антенной 3. С выхода приемной антенны 3 сигнал поступает на вход вращателя плоскости поляризации 4. Частота вращения плоскости поляризации равна Ω и задается частотой задающего генератора 6. С выхода вращателя плоскости поляризации 4 сигнал поступает на вход поляризатора 5, где происходит выделение горизонтально линейно-поляризованной составляющей сигнала.
В результате вращения плоскости поляризации на выходе логарифмического приемника 7 формулируется сигнал, модулированный по амплитуде удвоенной частотой вращения плоскости поляризации 2Ω. Полосовой фильтр 9 выделяет спектральную составляющую на частоте 2Ω и этот сигнал поступает на один из входов фазового детектора 10. С выхода задающего генератора 6 сигнал с частотой Ω поступает на вход формирователя опорного сигнала 8, где формируется сигнал с удвоенной частотой 2Ω, который поступает на другой вход фазового детектора 10. В фазовом детекторе 10 измеряется фаза φ2Ω спектральной составляющей на частоте 2Ω, по которой определяется угол крена γ ЛА. С выхода фазового детектора 10 сигнал поступает на индикатор 11, шкала которого прокалибрована в градусах угла крена γ ЛА.
В трехсантиметровом диапазоне длин волн заявляемое устройство измерения угла крена ЛА может быть выполнено следующим образом.
В качестве передатчика 1 может использоваться, например, генератор высокочастотных колебаний типа Г4-56 (см. [9], с.20).
В качестве передающей антенны 2 может быть использована рупорная антенна ([10], с.248), которая имеет собственную линейную горизонтальную поляризацию.
Приемная антенна 3 может быть выполнена в виде круглого рупора (см. [11], с.510).
Вращатель плоскости поляризации 4 может быть выполнен в виде фарадеевского вращателя плоскости поляризации (см. [7], с.344).
Поляризатор 5 может быть выполнен в виде перехода с волновода круглого сечения на прямоугольный (см. [7], с.438).
Задающий генератор 6 может быть выполнен в виде генератора синусоидальных колебаний.
Приемник 7 (см. [9]) может быть выполнен по известной схеме с логарифмической амплитудной характеристикой УПЧ (см. [7], с.438).
Формирователь опорного сигнала 8 может быть выполнен по известной схеме [7].
Полосовой фильтр 9 может быть выполнен с использованием операционных усилителей по известным схемам (см. [9]).
Фазовый детектор 10 может быть выполнен по известным схемам (см. [9]).
Индикатор 11 может быть выполнен в виде стрелочного прибора, шкала которого прокалибрована в градусах угла крена ЛА.
По сравнению с широко используемыми средствами измерения угла крена ЛА, основанными на применении гироскопических систем ориентации, заявляемые способ и устройство измерения угла крена ЛА позволяют избежать постоянного накапливания с течением времени ошибки измерения.
Источники информации
1. А.С.Александров, Г.Р.Арно и др. Современное состояние и тенденции развития зарубежных средств и систем навигации подвижных объектов военного и гражданского назначения. - Санкт-Петербург, 1994. - 119 с.
2. Д.С.Пельпор, В.В.Ягодкин. Гироскопические системы. - М.: Высшая школа, 1977. - 216 с.
3. Агаджапов П.А., Воробьев В.Г. и др. Автоматизация самолетовождения и управления воздушным движением. - М.: Транспорт, 1980. - 357 с.
4. Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь, 1985. - 344 с.
5. Корнблит С. СВЧ оптика. Пер. с англ. Под ред. Фролова О.П. - М.: Связь, 1980. - 360 с.
6. Азам Р., Бамара П. Эллипсометрия и поляризованный свет. - М.: Мир, 1981. - 588 с.
7. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация радиолокационных сигналов. - М.: «Советское радио», 1966. - 440 с.
8. Канарейкин Д.Б., Потехин В.А., Шишкин И.Ф. Морская поляриметрия. - Л.: Судостроение, 1963. - 328 с.
9. Носов B.C. Справочник по радиоизмерительным приборам. - М.: «Советское радио», 1978.
10. Дрябкин А.Л. и др. антенно-фидерные устройства. - М.: «Советское радио», 1974.
11. Жук М.С., Молочков Ю.Б. Проектирование антенно-фидерных устройств. - М.: «Энергия», 1966.
Изобретение относится к радионавигации и может использоваться в системах посадки летательных аппаратов по приборам. По сравнению с существующими инерциальными системами ориентации предлагаемые способ и устройство измерения угла крена летательного аппарата основаны на другом физическом принципе и используют радиотехнические средства навигации. Способ измерения угла крена заключается в том, что из точки с известными координатами излучают горизонтально линейно поляризованные электромагнитные волны. На борту летательного аппарата осуществляют прием электромагнитных волн приемной антенной, собственная поляризация которой вращается с некоторой частотой. По измеренной, на выходе приемника, фазе спектральной составляющей на удвоенной частоте вращения плоскости поляризации принимаемых сигналов определяется угол крена летательного аппарата. Достигаемый технический результат заявляемых способа и устройства, по сравнению с широко используемыми гироскопическими системами ориентации, заключается в исключении постоянного накапливания с течением времени ошибки измерения. 2 н.п. ф-лы, 1 ил.
1. Способ измерения угла крена летательного аппарата при его движении на источник излучения электромагнитных волн, отличающийся тем, что из точки с известными координатами излучают горизонтально линейно поляризованные электромагнитные волны, вектор напряженности электрического поля  которых совпадает с горизонтальной плоскостью, на борту летательного аппарата принимают электромагнитные волны в собственном линейном ортогональном поляризационном базисе, единичные орты которого совпадают с вертикальной и поперечной осями летательного аппарата соответственно, а собственная поляризация приемной антенны линейная и вращается с частотой Ω на основании принятого сигнала на выходе приемника с логарифмической амплитудной характеристикой и линейным детектированием Евых(t)=lgс+lg1/2·[1+cos(2Ωt±2γ)], где с - постоянная величина, учитывающая потенциал передатчика, расстояние от передатчика до летательного аппарата, чувствительность приемника, выделяют из принятого сигнала спектральную составляющую на частоте 2Ω, измеряют ее фазу φ2Ω относительно удвоенного углового положения собственной поляризации приемной антенны и определяют угол крена γ летательного аппарата между поперечной осью летательного аппарата и горизонтальной плоскостью по формуле:
которых совпадает с горизонтальной плоскостью, на борту летательного аппарата принимают электромагнитные волны в собственном линейном ортогональном поляризационном базисе, единичные орты которого совпадают с вертикальной и поперечной осями летательного аппарата соответственно, а собственная поляризация приемной антенны линейная и вращается с частотой Ω на основании принятого сигнала на выходе приемника с логарифмической амплитудной характеристикой и линейным детектированием Евых(t)=lgс+lg1/2·[1+cos(2Ωt±2γ)], где с - постоянная величина, учитывающая потенциал передатчика, расстояние от передатчика до летательного аппарата, чувствительность приемника, выделяют из принятого сигнала спектральную составляющую на частоте 2Ω, измеряют ее фазу φ2Ω относительно удвоенного углового положения собственной поляризации приемной антенны и определяют угол крена γ летательного аппарата между поперечной осью летательного аппарата и горизонтальной плоскостью по формуле:
где φ2Ω - фаза спектральной составляющей на частоте 2Ω (в радианах),
+γ - положительный угол крена, когда правое крыло летательного аппарата или его поперечная ось находятся ниже горизонтальной плоскости,
-γ - отрицательный угол крена, когда правое крыло летательного аппарата или его поперечная ось находятся выше горизонтальной плоскости.
2. Устройство для измерения угла крена летательного аппарата, отличающееся тем, что в точке с известными координатами располагается передатчик, выход которого подключен к входу передающей антенны, и расположенные на борту летательного аппарата приемная антенна, выход которой подключен к входу вращателя плоскости поляризации, выполненного в виде фарадеевского вращателя плоскости поляризации на основе круглого волновода, а его управляющий вход подключен к выходу задающего генератора, выход вращателя плоскости поляризации подключен к входу со стороны круглого волновода поляризатора, а его выход со стороны прямоугольного волновода подключен к последовательно соединенным логарифмическому приемнику и полосовому фильтру, выход которого подключен к первому входу фазового детектора, выход задающего генератора подключен к входу формирователя опорного сигнала, а его выход подключен ко второму входу фазового детектора, выход фазового детектора подключен к входу индикатора, шкала которого прокалибрована в градусах угла крена летательного аппарата, причем центральная частота полосового фильтра и частота опорного сигнала равны удвоенной частоте вращения плоскости поляризации, а собственные поляризации передающей антенны и поляризатора линейные горизонтальные.
| СИСТЕМА ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2009 |
|
RU2393429C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2302006C1 |
| МНОГОПОЛЯРИЗАЦИОННЫЙ СПОСОБ РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2139553C1 |
| RU 2191351 C1, 20.10.2002 | |||
| US 7672758 B2, 02.03.2010 | |||
| US 7894948 В2, 22.02.2011 | |||
| Станок для обработки паркетных заготовок | 1990 |
|
SU1794660A1 |

