Изобретение относится к радионавигации и может использоваться в пилотажно-навигационных системах ориентации летательного аппарата (ЛА) при заходе на посадку по приборам.
Известные в практической навигации способы и устройства измерения угла крена ЛА основаны на использовании инерциальных систем навигации, в частности гироскопических систем ориентации [1-4]. Таким способом измерения присущ ряд недостатков. Во - первых, с течением времени происходит постоянное накопление ошибки измерений и за один час полета она составляет величину единицы градусов [2, 3]. Во - вторых, если ЛА развивает значительные перегрузки, то происходит увеличение собственной скорости прецессии гироскопа, что в ряде случаев может привести к полной потере его работоспособности [2].
Поскольку известные способы измерения угла крена ЛА основаны на другом физическом принципе, по сравнению с заявляемым, то они не могут рассматриваться в качестве аналогов, так как не имеют общих признаков.
Наиболее близким по совокупности признаков к заявляемому способу радиолокационного определения угла крена ЛА является поляризационно-модуляционный способ радиолокационного измерения угла крена летательного аппарата [5] (патент № 2537384. Приоритет от 09 июня 2013г. Опубликован 10.01.2015г. Бюлл. №1 автор Гулько В.Л.)
Сущность поляризационно-модуляционного способа радиолокационного измерения угла крена ЛА заключается в следующем.
В точке с известными координатами располагают пассивный радиомаяк, представляющий собой поляризационно-анизотропный радиолокационный уголковый отражатель (УО) с горизонтальной линейной собственной поляризацией, совпадающей с горизонтальной плоскостью. Поляризационно-анизотропный радиолокационный УО включают в себя трехгранный УО, составляющий из трех плоских взаимно перпендикулярных металлических или металлизированных треугольных граней, в раскрыве которого помещена вертикально ориентированная поляризационная решетка (ПР) из круглых параллельно расположенных металлических проводников с шагом A и диаметром В [5-7]. Параметры ПР шаг A и диаметр проводников В выбираются такими, что компонента (или составляющая [7,8]) вектора напряженности электрического поля падающей электромагнитной волны  плоскость поляризации которой ортогональна ПР и совпадает с горизонтальной плоскостью, проходит через ПР практически не изменяясь и, после трехкратного отражения от треугольных граней трехгранного УО, отраженная электромагнитная волна
плоскость поляризации которой ортогональна ПР и совпадает с горизонтальной плоскостью, проходит через ПР практически не изменяясь и, после трехкратного отражения от треугольных граней трехгранного УО, отраженная электромагнитная волна  распространяется в направлении обратном направлению падения [5-7]. При этом отраженная от УО электромагнитная волна всегда горизонтально линейно поляризована и ее плоскость поляризации совпадает с горизонтальной плоскостью не зависимо от угла ориентации плоскости поляризации падающей волны
распространяется в направлении обратном направлению падения [5-7]. При этом отраженная от УО электромагнитная волна всегда горизонтально линейно поляризована и ее плоскость поляризации совпадает с горизонтальной плоскостью не зависимо от угла ориентации плоскости поляризации падающей волны  [5-7]. В тоже время компонента вектора напряженности электрического поля плоскость поляризации которой параллельна металлическим проводникам ПР и находится в вертикальной плоскости полностью отражается от ПР как от плоской металлической пластины [5-7]. Такой трехгранный УО с размещенной в плоскости раскрыва УО вертикально ориентированной ПР представляет собой поляризационно-анизотропный объект с горизонтальной линейной плоскостью поляризацией и его матрица рассеяния (МР) в линейном поляризационном базисе имеет вид [5-7]
[5-7]. В тоже время компонента вектора напряженности электрического поля плоскость поляризации которой параллельна металлическим проводникам ПР и находится в вертикальной плоскости полностью отражается от ПР как от плоской металлической пластины [5-7]. Такой трехгранный УО с размещенной в плоскости раскрыва УО вертикально ориентированной ПР представляет собой поляризационно-анизотропный объект с горизонтальной линейной плоскостью поляризацией и его матрица рассеяния (МР) в линейном поляризационном базисе имеет вид [5-7]
 (1)
(1)
где  - максимально возможная ЭПР поляризационно-анизотропного УO при облучении его линейно горизонтально поляризованной электромагнитной волной.
- максимально возможная ЭПР поляризационно-анизотропного УO при облучении его линейно горизонтально поляризованной электромагнитной волной.
Из анализа (1) следует, что в линейном поляризационном базисе вырожденная МР (1) трехгранного УО, в раскрыве которого помещена вертикально ориентированная ПР эквивалентна МР ярко выраженному поляризационно-анизотропному радиолокационному объекту, представляющему собой горизонтальный вибратор [5-7].
При движении ЛА на пассивный радиомаяк с МР (1) и облучении его с борта ЛА линейно поляризованной электромагнитной волной, вектор напряженности электрического поля который вращается с частотой  отраженная от треугольных граней УО электромагнитная волна независимо от угла ориентации плоскости поляризации падающей волны будет всегда поляризована линейно горизонтально и, соответственно, вектор напряженности электрического поля отраженной от УО электромагнитной волны будет всегда совпадать с горизонтальной плоскостью [5-7]. При этом интенсивность или амплитуда отраженной и, соответственно, принятой на борту ЛА, электромагнитной волны будет изменяться с частотой
отраженная от треугольных граней УО электромагнитная волна независимо от угла ориентации плоскости поляризации падающей волны будет всегда поляризована линейно горизонтально и, соответственно, вектор напряженности электрического поля отраженной от УО электромагнитной волны будет всегда совпадать с горизонтальной плоскостью [5-7]. При этом интенсивность или амплитуда отраженной и, соответственно, принятой на борту ЛА, электромагнитной волны будет изменяться с частотой  от некоторого максимума, при совпадении горизонтальной линейной поляризации излученной электромагнитной волны с собственной горизонтальной линейной поляризацией поляризационно-анизотропного УО, до минимума, при вертикальной ориентации плоскости поляризации излученной электромагнитной волны [5,6]. Отмечается [5,6], что эти условия соблюдаются только в том случае, когда поперечная ось ЛА находится в горизонтальной плоскости, т.е. крен ЛА отсутствует и, соответственно, излученная горизонтально линейно поляризованная электромагнитная волна и принятая на борту ЛА электромагнитная волна совпадают по поляризации и их плоскости поляризации совпадают с горизонтальной плоскостью [5,6]. В тех случаях, когда крен ЛА отличен от нуля, т.е. поперечная ось ЛА не находится в горизонтальной плоскости, то угловые положения плоскости поляризации излученной линейно поляризованной электромагнитной волны , при которых достигается максимум или минимум интенсивность отраженной от УО электромагнитной волны и, соответственно, принятой на борту ЛА электромагнитной волны, смещаются и определяются креном ЛА [5,6]. При этом плоскость поляризации отраженной от УО электромагнитной волны по прежнему горизонтальная и находится в горизонтальной плоскости, а плоскость поляризации принятой на борту ЛА электромагнитной волны не совпадает с горизонтальной плоскостью и ее угол ориентации определяется величиной угла крена ЛА, что определяет физическую основу измерений его угла крена [5,6].
от некоторого максимума, при совпадении горизонтальной линейной поляризации излученной электромагнитной волны с собственной горизонтальной линейной поляризацией поляризационно-анизотропного УО, до минимума, при вертикальной ориентации плоскости поляризации излученной электромагнитной волны [5,6]. Отмечается [5,6], что эти условия соблюдаются только в том случае, когда поперечная ось ЛА находится в горизонтальной плоскости, т.е. крен ЛА отсутствует и, соответственно, излученная горизонтально линейно поляризованная электромагнитная волна и принятая на борту ЛА электромагнитная волна совпадают по поляризации и их плоскости поляризации совпадают с горизонтальной плоскостью [5,6]. В тех случаях, когда крен ЛА отличен от нуля, т.е. поперечная ось ЛА не находится в горизонтальной плоскости, то угловые положения плоскости поляризации излученной линейно поляризованной электромагнитной волны , при которых достигается максимум или минимум интенсивность отраженной от УО электромагнитной волны и, соответственно, принятой на борту ЛА электромагнитной волны, смещаются и определяются креном ЛА [5,6]. При этом плоскость поляризации отраженной от УО электромагнитной волны по прежнему горизонтальная и находится в горизонтальной плоскости, а плоскость поляризации принятой на борту ЛА электромагнитной волны не совпадает с горизонтальной плоскостью и ее угол ориентации определяется величиной угла крена ЛА, что определяет физическую основу измерений его угла крена [5,6].
Вращение плоскости поляризации излученной электромагнитной волны с частотой  приведет к амплитудной модуляции с частотой
приведет к амплитудной модуляции с частотой  принятой на борту ЛА электромагнитной волны. Выделение из амплитуды принятого сигнала на выходе приемника спектральной составляющей на частоте и измерение ее фазы относительно удвоенного углового положения плоскости поляризации излученной электромагнитной волны позволит определить угол крена ЛА [5]. Для установления этой связи используется формализм векторов и матриц Джонса [9]. Было установлено [5], что при движении ЛА с креном
принятой на борту ЛА электромагнитной волны. Выделение из амплитуды принятого сигнала на выходе приемника спектральной составляющей на частоте и измерение ее фазы относительно удвоенного углового положения плоскости поляризации излученной электромагнитной волны позволит определить угол крена ЛА [5]. Для установления этой связи используется формализм векторов и матриц Джонса [9]. Было установлено [5], что при движении ЛА с креном  на пассивный поляризационно-анизотропный УО с МР (1) и облучении его линейной поляризованной волной плоскость поляризации которой вращается с частотой и приеме электромагнитной волны в линейном поляризационном базисе, орты которого совпадают с вертикальной и поперечной строительными осями ЛА, то амплитуда сигнала на выходе приемника, имеющего логарифмическую амплитудную характеристику и линейный детектор будет равна [5,6]
на пассивный поляризационно-анизотропный УО с МР (1) и облучении его линейной поляризованной волной плоскость поляризации которой вращается с частотой и приеме электромагнитной волны в линейном поляризационном базисе, орты которого совпадают с вертикальной и поперечной строительными осями ЛА, то амплитуда сигнала на выходе приемника, имеющего логарифмическую амплитудную характеристику и линейный детектор будет равна [5,6]
 (2)
(2)
где С - постоянная величина, учитывающая потенциал передатчика, расстояние от передатчика до пассивного радиомаяка и обратно, его максимально возможную ЭПР  и чувствительность приемника.
и чувствительность приемника.
Отмечается [5,6], что соотношение (2) справедливо для случая когда ЛА двигается на пассивный радиомаяк и исходная излучаемая передатчиком электромагнитная волна горизонтально линейно поляризована и ее плоскость поляризации совпадает с поперечной осью ЛА.
Из анализа (2) видим, что в спектре огибающей выходного сигнала логарифмического приемника присутствует спектральная составляющая на частоте и ее фаза  определяется только углом крена
определяется только углом крена  ЛА и связана с ним соотношением [5]
ЛА и связана с ним соотношением [5]
 (3)
(3)
где « » - положительный угол крена, когда правое крыло или поперечная ось ЛА находится ниже горизонтальной плоскости,
» - положительный угол крена, когда правое крыло или поперечная ось ЛА находится ниже горизонтальной плоскости,
« » - отрицательный угол крена, когда правое крыло или поперечная ось ЛА находится выше горизонтальной плоскости.
» - отрицательный угол крена, когда правое крыло или поперечная ось ЛА находится выше горизонтальной плоскости.
Фаза  отсчитывается относительно фазы опорного сигнала
отсчитывается относительно фазы опорного сигнала  определяемой угловым положением плоскости поляризации излучаемого сигнала [5].
определяемой угловым положением плоскости поляризации излучаемого сигнала [5].
Недостаток рассмотренного поляризационно-модуляционного способа радиолокационного измерения угла крена ЛА заключается в его низком быстродействии поскольку для оценки крена требуется излучать и, соответственно, принимать электромагнитные волны ориентация линейной плоскости поляризации которых должна принимать последовательно во времени за период поляризационной модуляции все возможные угловые положения, что несомненно, увеличивает время измерений и снижает быстродействие.
Использование поляризационных характеристик излучаемых сигналов, а также использование поляризационных характеристик рассеяния поляризационно-анизотропного радиолокационного УО (пассивного радиомаяка) для оценки угла крена ЛА обуславливает необходимость их рассмотрения в конкретных поляризационных базисах и в различных системах координат, связанных с пассивным радиомаяком и ЛА. При этом выбор опорной системы координат (О.С.К.), связанной с радиомаяком, собственной системы координат (С.С.К.), связанной со строительными осями ЛА, а также выбор алгоритма поляризационной обработки сигналов определяется как особенностями решаемой технической задачи, так и удобством анализа с точки зрения физической интерпретации полученных результатов.
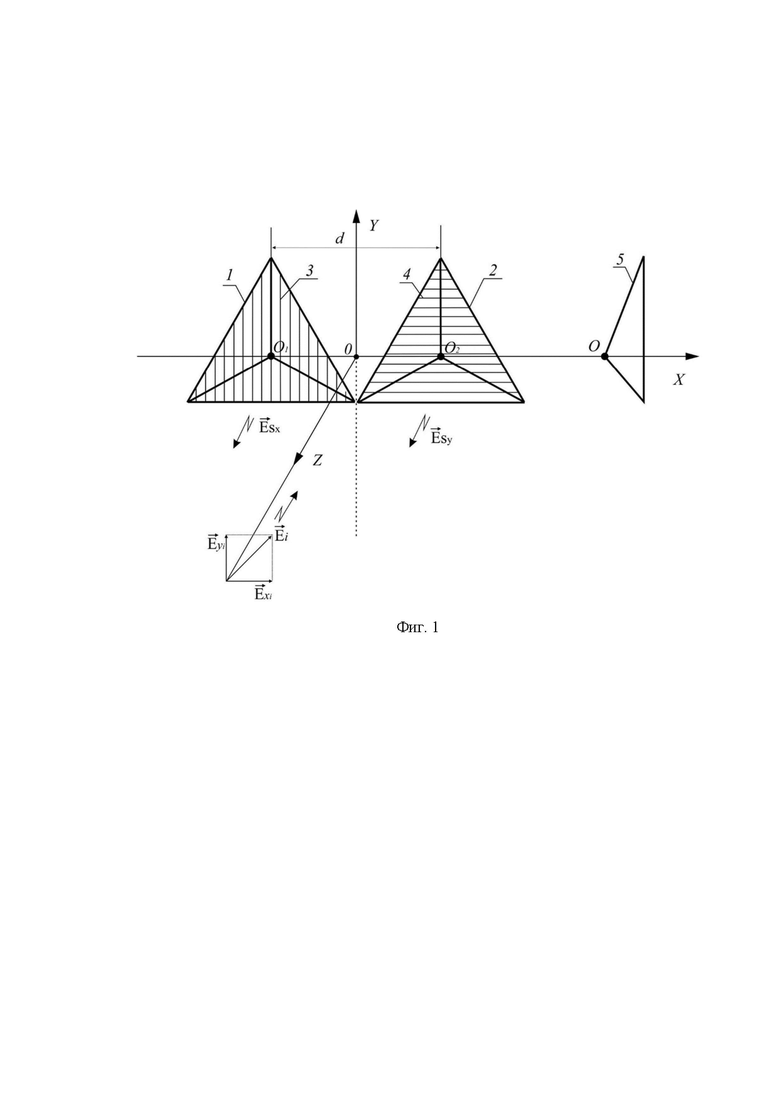
На фиг. 1 представлен пассивный радиомаяк, состоящий из двух пространственно разнесенных на расстоянии d в горизонтальной плоскости поляризационно-анизотропных радиолокационных трехгранных УО1 и УО2 с горизонтальной и вертикальной линейными собственными поляризациями соответственно, расположенный в точке с известными координатами. Здесь обозначено: 1 - первый трехгранный УО1; 2 - второй трехгранный УО2; 3 - вертикально ориентированная ПР из параллельно расположенных металлических проводников с шагом решетки A и диаметром проводников B; 4 - горизонтально ориентированная ПР с теми же параметрами решетки A и B; 5 - Вид сбоку.
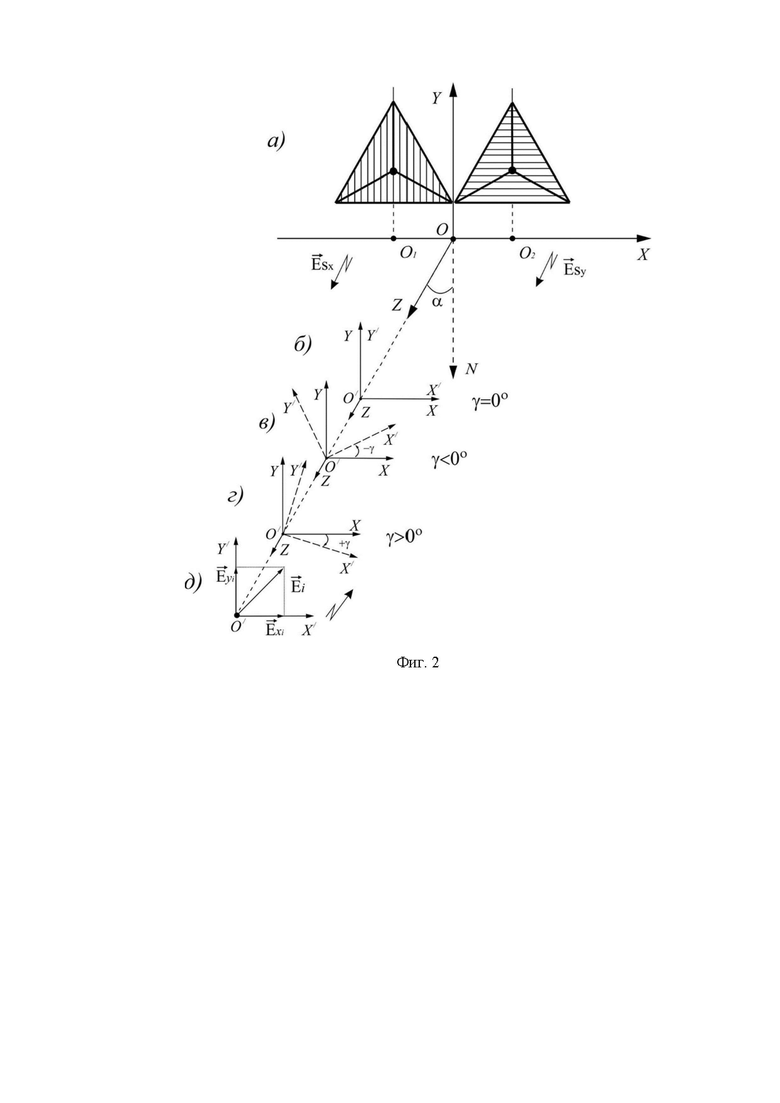
На фиг. 2 представлены пояснения к способу радиолокационного определения угла крена ЛА.
Сущность заявляемого способа радиолокационного определения угла крена летательного аппарата.
Расположим в точке с известными координатами пассивный радиомаяк в виде двух пространственно разнесенных на расстоянии d в горизонтальной плоскости поляризационно-анизотропных радиолокационных трехгранных УО1 и УО2 с горизонтальной и вертикальной линейными собственными поляризациями соответственно (фиг.1). Радиолокационные УО1 и УО2 выполнены в виде трехгранного УО, состоящего из трех плоских взаимно перпендикулярных металлических или металлизированных треугольных граней одинакового размера, значительно превышающего длину волны. Введем декартову О.С.К., оси OX и OZ которой находятся в горизонтальной плоскости XOZ, а ось OY перпендикулярна ей. Нормаль  ориентирована к середине базы d и находится в горизонтальной плоскости XOZ (см. фиг. 1). Вершины УО1 и УО2 расположим в точках
ориентирована к середине базы d и находится в горизонтальной плоскости XOZ (см. фиг. 1). Вершины УО1 и УО2 расположим в точках  и
и  равноудаленно на оси OX на расстоянии
равноудаленно на оси OX на расстоянии  от начала декартовой О.С.К. точки O.
от начала декартовой О.С.К. точки O.
Для придания радиолокационному поляризационно-изотропному трехгранному УО поляризационно-анизотропных свойств с горизонтальной собственной поляризацией в раскрыве первого УО1 размещалась вертикально ориентированная поляризационная решетка ПР3 из параллельных металлических проводников с шагом А и диаметром В [5-7]. Соответственно для придания второму УО2 поляризационно-анизотропных свойств с вертикальной собственной поляризацией в его раскрыве размещалась горизонтально ориентированная поляризационная решетка ПР4 с такими же параметрами проводников. Параметры А и В ПР3 и ПР4 выбирались такими, чтобы например, компонента  вектора напряженности электрического поля падающей электромагнитной волны
вектора напряженности электрического поля падающей электромагнитной волны  , плоскость поляризации которой ортогональна металлическим проводникам ПР3, проходила через ПР3 практически не изменяясь, и после трехкратного отражения от треугольных граней УО1, распространялась в направлении, обратном направлению падения [5,6]. При этом отраженная от УО1 электромагнитная волна
, плоскость поляризации которой ортогональна металлическим проводникам ПР3, проходила через ПР3 практически не изменяясь, и после трехкратного отражения от треугольных граней УО1, распространялась в направлении, обратном направлению падения [5,6]. При этом отраженная от УО1 электромагнитная волна  будет всегда горизонтально поляризована и ее фазовый центр рассеяния будет находиться в вершине УО1 (см. фиг.1). В тоже время компонента
будет всегда горизонтально поляризована и ее фазовый центр рассеяния будет находиться в вершине УО1 (см. фиг.1). В тоже время компонента  плоскость поляризации которой параллельна металлическим проводникам ПР3, полностью отражается от нее как от плоской металлической пластины [5-7]. Аналогичным образом действует горизонтально ориентированная ПР4 второго УО2. Только в этом случае компонента вектора напряженности электрического поля падающей электромагнитной волны , плоскость поляризации которой ортогональна металлическим проводникам ПР4, проходила через ПР4 практически не изменяясь и после трехкратного отражения от треугольных граней УО2 распространялась в направлении, обратном направлению падения. [5,6]. При этом отраженная от УО2 электромагнитная волна
плоскость поляризации которой параллельна металлическим проводникам ПР3, полностью отражается от нее как от плоской металлической пластины [5-7]. Аналогичным образом действует горизонтально ориентированная ПР4 второго УО2. Только в этом случае компонента вектора напряженности электрического поля падающей электромагнитной волны , плоскость поляризации которой ортогональна металлическим проводникам ПР4, проходила через ПР4 практически не изменяясь и после трехкратного отражения от треугольных граней УО2 распространялась в направлении, обратном направлению падения. [5,6]. При этом отраженная от УО2 электромагнитная волна  будет всегда вертикально поляризована и ее фазовый центр рассеяния будет находиться в вершине УО2 (см. фиг.1) В тоже время компонента
будет всегда вертикально поляризована и ее фазовый центр рассеяния будет находиться в вершине УО2 (см. фиг.1) В тоже время компонента  плоскость поляризации которой параллельна металлическим проводникам ПР4, полностью отражается от нее как от плоской металлической пластины [5,6].
плоскость поляризации которой параллельна металлическим проводникам ПР4, полностью отражается от нее как от плоской металлической пластины [5,6].
Таким образом, трехгранные УО1 и УО2 с размещенной в плоскости раскрыва вертикально ориентированной ПР или горизонтально ориентированной ПР рассматриваются как поляризационно-анизотропные объекты соответственно с горизонтальной и вертикальной собственными поляризациями.
Матрицы рассеяния (МР)  и
и  поляризационно-анизотропных УO1 и УO2 в О.С.К. в линейном поляризационном базисе, опуская временную зависимость, могут быть представлены в виде [5, 6]
поляризационно-анизотропных УO1 и УO2 в О.С.К. в линейном поляризационном базисе, опуская временную зависимость, могут быть представлены в виде [5, 6]
 (4)
(4)
где  , и
, и  - максимально возможные ЭПР УO1 и УO2 при облучении их горизонтально и вертикально поляризованными волнами соответственно.
- максимально возможные ЭПР УO1 и УO2 при облучении их горизонтально и вертикально поляризованными волнами соответственно.
Из (4) также следует, что в О.С.К вырожденные МР поляризационно-анизотропных УО1 и УО2 в линейном поляризационном базисе эквивалентны МР ярко выраженным поляризационно-анизотропным радиолокационным объектам, представляющим собой горизонтальный и вертикальный вибраторы соответственно.
Пусть ЛА находится в точке  и движется в направлении
и движется в направлении  на пассивный радиомаяк (см. фиг. 2а). Определим С.С.К. ЛА как подвижную декартову систему координат
на пассивный радиомаяк (см. фиг. 2а). Определим С.С.К. ЛА как подвижную декартову систему координат  образованную поперечной
образованную поперечной  вертикальной
вертикальной  и продольной
и продольной  строительными осями ЛА. Начало ее поместим в точку , совпадающую с центром масс ЛА (см фиг. 2.) Тогда угол крена будет равен углу поворота осей
строительными осями ЛА. Начало ее поместим в точку , совпадающую с центром масс ЛА (см фиг. 2.) Тогда угол крена будет равен углу поворота осей  и С.С.К. в плоскости XOY О.С.К., перпендикулярной оси OZ относительно осей OX и OY О.С.К.
и С.С.К. в плоскости XOY О.С.К., перпендикулярной оси OZ относительно осей OX и OY О.С.К.
Очевидно, когда крен ЛА отсутствует, направления поперечной оси  и OX совпадают, т.е. ось находится в горизонтальной плоскости XOZ (см.фиг.2 б). В случае появления крена поперечная ось ЛА будет повернута в ту или другую сторону в плоскости XOY и угол поворота будет равен отрицательному «-» (см. фиг. 2в), или положительному «+» (см. фиг.2г). Сама операция поворота С.С.К. может быть определена с помощью соответствующих операторов поворота [5-9], которые будут рассмотрены ниже.
и OX совпадают, т.е. ось находится в горизонтальной плоскости XOZ (см.фиг.2 б). В случае появления крена поперечная ось ЛА будет повернута в ту или другую сторону в плоскости XOY и угол поворота будет равен отрицательному «-» (см. фиг. 2в), или положительному «+» (см. фиг.2г). Сама операция поворота С.С.К. может быть определена с помощью соответствующих операторов поворота [5-9], которые будут рассмотрены ниже.
Пусть с борта ЛА УО1 и УО2 облучаются линейно поляризованной волной , плоскость поляризации которой составляет угол  с поперечной осью ЛА (см.фиг.2д). Вектор Джонса такой волны может быть записан в линейном поляризационном базисе, опуская временную зависимость, в виде [9]
с поперечной осью ЛА (см.фиг.2д). Вектор Джонса такой волны может быть записан в линейном поляризационном базисе, опуская временную зависимость, в виде [9]
 (5)
(5)
Множитель  в (5) принят для удобства единичной интенсивности излучаемой электромагнитной волны.
в (5) принят для удобства единичной интенсивности излучаемой электромагнитной волны.
Пусть ЛА имеет в общем случае крен  Тогда используя формализм векторов и матриц Джонса [9] и выражения (4) найдем отраженные от УО1 и УО2 вектора Джонса ортогонально линейно поляризованных компонент
Тогда используя формализм векторов и матриц Джонса [9] и выражения (4) найдем отраженные от УО1 и УО2 вектора Джонса ортогонально линейно поляризованных компонент  и
и  соответственно в линейном поляризационном базисе с помощью преобразований вида:
соответственно в линейном поляризационном базисе с помощью преобразований вида:
 (6)
(6)
 (7)
(7)
где - вектор Джонса исходной излучаемой электромагнитной волны
 - прямой оператор поворота [9] на угол крена
- прямой оператор поворота [9] на угол крена 
«+» - положительный угол крена, когда правое крыло и поперечная ось
- положительный угол крена, когда правое крыло и поперечная ось  ЛА находится ниже горизонтальной плоскости
ЛА находится ниже горизонтальной плоскости  [4],
[4],
«-» - отрицательный угол крена, когда правое крыло или поперечная ось ЛА находится выше горизонтальной плоскости [4],
- отрицательный угол крена, когда правое крыло или поперечная ось ЛА находится выше горизонтальной плоскости [4],
 - матрица рассеяния поляризационно-анизотропного первого УO1 с горизонтальной линейной собственной поляризацией;
- матрица рассеяния поляризационно-анизотропного первого УO1 с горизонтальной линейной собственной поляризацией;
 - матрица рассеяния поляризационно-анизотропного второго УO2 с вертикальной линейной собственной поляризацией;
- матрица рассеяния поляризационно-анизотропного второго УO2 с вертикальной линейной собственной поляризацией;
 - обратный оператор поворота [9] на угол
- обратный оператор поворота [9] на угол  ЛА,
ЛА,
 - оператор первого плеча линейного поляризационного разделителя (переход с круглого волновода на прямоугольный) с горизонтальной линейной собственной поляризацией, совпадающей с поперечной осью ЛА,
- оператор первого плеча линейного поляризационного разделителя (переход с круглого волновода на прямоугольный) с горизонтальной линейной собственной поляризацией, совпадающей с поперечной осью ЛА,
 - оператор второго плеча линейного поляризационного разделителя (переход с круглого волновода на прямоугольный волновод) с вертикальной линейной собственной поляризацией совпадающей с вертикальной осью
- оператор второго плеча линейного поляризационного разделителя (переход с круглого волновода на прямоугольный волновод) с вертикальной линейной собственной поляризацией совпадающей с вертикальной осью  ЛА,
ЛА,
С - постоянная величина, учитывающая потенциал передатчика, расстояние от передатчика до УО1 и УО2 и обратно, их максимально возможные ЭПР  и чувствительность приемника.
и чувствительность приемника.
Выполнив в (6) и (7) необходимые матричные вычисления, получим вектора Джонса ортогонально линейно поляризованных компонент на соответствующих выходах линейного поляризационного разделителя в виде:
 (8)
(8)
 (9)
(9)
Тогда сигналы непосредственно на входах 2-х канального приемника будут иметь вид:
 (10)
(10)
 (11)
(11)
Отношение амплитуд  сигналов
сигналов  и
и  на выходах 2-х канального приемника с линейной амплитудной характеристикой и линейным детектором будет равно
на выходах 2-х канального приемника с линейной амплитудной характеристикой и линейным детектором будет равно
 (12)
(12)
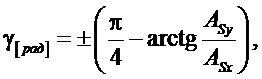
Отсюда крен  ЛА будет определяться по формуле
ЛА будет определяться по формуле
 (13)
(13)
где знак «+» - соответствует положительному углу крена, а знак «-» - отрицательному.
Из (13) следует, что при  угол крена ЛА
угол крена ЛА  (см. фиг. 2б), при
(см. фиг. 2б), при  крен
крен  (фиг. 2в),
(фиг. 2в),  ,
,  (см. фиг. 2г).
(см. фиг. 2г).
В случае, если двухканальный приемник имеет логарифмические амплитудные характеристики и линейный детектор, то выражение для определения угла крена ЛА преобразуется к виду:
 (14)
(14)
Из полученных выражений (13) и (14) следует, что в рассматриваемом радиолокационном способе информация о крене ЛА содержится в амплитудных соотношениях ортогонально-линейно поляризованных компонент принятых на борту ЛА в линейном поляризационном базисе.
Использование заявляемой совокупности признаков для определения угла крена ЛА в известных решениях авторами не обнаружено.
В 3-х см. диапазоне длин волн заявляемый способ радиолокационного определения угла крена летательного аппарата может быть реализован следующим образом.
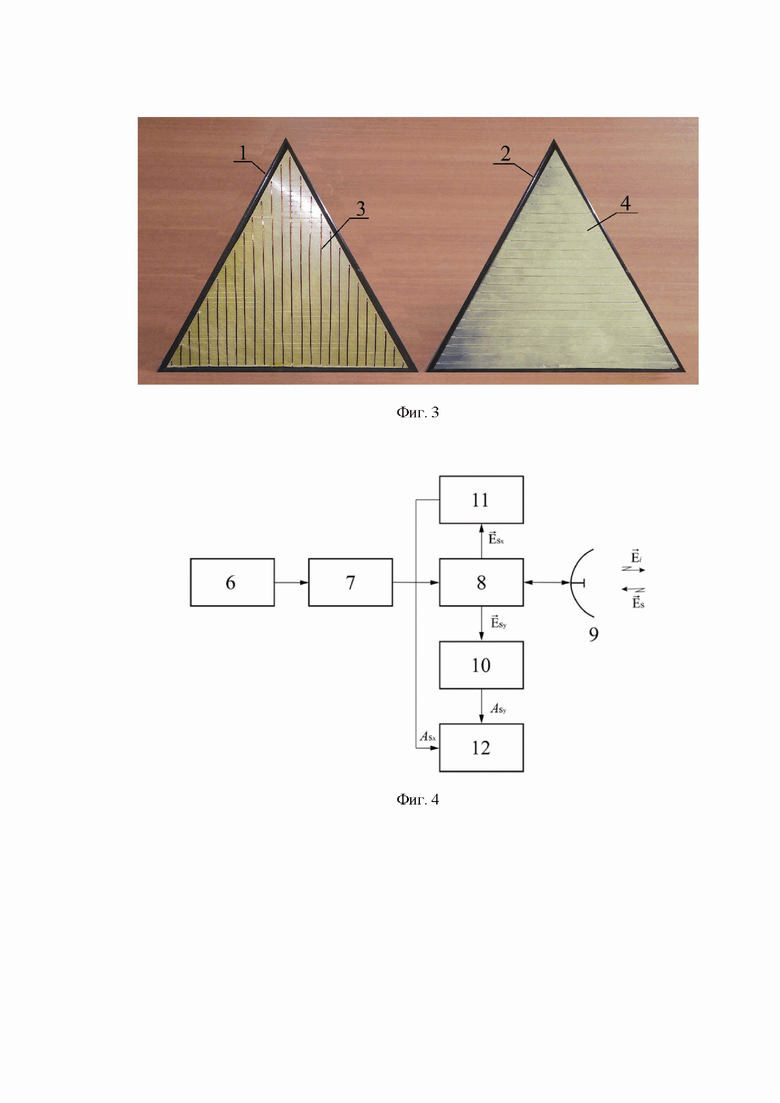
На фиг. 3 представлен вариант исполнения пассивного радиомаяка, представляющего собой два пространственно разнесенных на расстоянии d в горизонтальной плоскости поляризационно-анизотропных трехгранных уголковых отражателей УО1 и УО2 с горизонтальной и вертикальной собственными поляризациями соответственно. Позиция 1 - первый трехгранный УО1 с треугольными отражающими гранями. Позиция 2 - второй трехгранный УО2 с треугольными отражающими гранями. Позиция 3 - вертикально ориентированная ПР, выполненная из не фольгированного стеклотекстолита с параллельно расположенными на ней медными проводниками с параметрами A=8 мм, B= 0,8 мм [5, 6]. Позиция 4 - горизонтально ориентированная ПР с теми же параметрами A и B.
На фиг. 4 представлена известная в [9] структурная электрическая схема бортовой РЛС с помощью которой может быть реализован предложенный способ радиолокационного определения угла крена летательного аппарата.
Бортовая РЛС содержит передатчик 6, волноводный преобразователь на  (волноводная скрутка) 7, линейный поляризационных разделитель 8, приемо-передающую антенну 9, приемник 10, приемник 11, и вычислитель 12.
(волноводная скрутка) 7, линейный поляризационных разделитель 8, приемо-передающую антенну 9, приемник 10, приемник 11, и вычислитель 12.
Бортовая РЛС работает следующим образом.
Передатчик 6 формирует импульсный радиосигнал с горизонтальной плоскостью поляризации, который поступает на волноводный преобразователь 7, на выходе которого формируется импульсный радиосигнал плоскость поляризации которого составляет угол 
С выхода волноводного преобразователя 7 импульсный радиосигнал через линейный поляризационный разделитель 8 поступает на приемо-передающую антенну 9 и излучается в пространство в направлении пассивного радиомаяка. Отраженный  импульсный радиосигнал принимается приемной антенной 9 и поступает на линейный поляризационный разделитель 8, представляющий собой отрезок круглого волновода с переходом на ортогонально расположенных по отношению друг к другу прямоугольных волноводов. В линейном поляризационном разделителе 8, происходит разделение отраженного сигнала на две ортогонально линейно поляризованные компоненты
импульсный радиосигнал принимается приемной антенной 9 и поступает на линейный поляризационный разделитель 8, представляющий собой отрезок круглого волновода с переходом на ортогонально расположенных по отношению друг к другу прямоугольных волноводов. В линейном поляризационном разделителе 8, происходит разделение отраженного сигнала на две ортогонально линейно поляризованные компоненты  и
и  , а в приемниках 10 и 11 происходит измерение их амплитуд
, а в приемниках 10 и 11 происходит измерение их амплитуд  и
и  . В вычислителе 12 по измеренным и определяется угол крена. Если приемники 10 и 11 имеют линейные амплитудные характеристики и линейный детектор, то угол крена в вычислителе 12 определяется по формуле (13). А если, имеет логарифмические амплитудные характеристики, то крен определяется по формуле (14).
. В вычислителе 12 по измеренным и определяется угол крена. Если приемники 10 и 11 имеют линейные амплитудные характеристики и линейный детектор, то угол крена в вычислителе 12 определяется по формуле (13). А если, имеет логарифмические амплитудные характеристики, то крен определяется по формуле (14).
По сравнению с прототипом заявляемый способ радиолокационного определения угла крена ЛА характеризуется большим быстродействием, так как допускает моноимпульсную оценку угла крена поскольку необходимым и достаточным требованием является излучение одного импульсного радиосигнала только на одной фиксированной линейной поляризации излучения, что сокращает время измерения и повышает его быстродействие. Кроме того, по сравнению с широко используемыми в практической навигации способами измерения угла крена ЛА, основанными на использовании гироскопических систем ориентации, заявляемый способ позволяет избежать постоянного накапливания с течением времени ошибки измерения.
Использованные источники информации
1. Skrypnik O.N. Radio Navigation Systems for Airports and Airways (Singapore:Springer). 2019.- 239p.
2. Пельпор Д.С., Ягодкин В.В. Гироскопические системы - М.: Высшая школа, 1988 -216 с.
3.Александров А.С., Арно Г.Р., и др. Современное состояние и тенденции развития зарубежных средств и систем навигации подвижных объектов военного и гражданского назначения. - Санкт-Петербург. 1994, - 119 с.
4. Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь. 1985. 345 с.
5. Гулько В.Л. Патент Ru 2537384, МПК GOIS 13/93, Б.И.№1 опубл. 10.01.2015.
6. Гулько В.Л., Мещеряков А.А., Блинковский Н.К. Радиолокационный метод определения угла крена летательного аппарата. Приборы и техника эксперимента, 2022, № 3, с. 126-134.
7. Кобак В.О. Радиолокационные отражатели. - М. : «Сов. Радио и связь» 1975г. - 248с.
8. Канарейкин Д.Б., Потехин В.А., Шишкин Н.Ф. Морская поляриметрия. - Л.: Судостроение, 1968, - 328с.
9. Аззам Р., Башара Н. Эллипсометрия и поляризованный свет /- М.: МИР. 1981.-583 с.
Изобретение относится к радионавигации и может использоваться в системах посадки летательных аппаратов по приборам. Технический результат заключается в повышении быстродействия измерений угла крена летательного аппарата радиолокационным способом. Заявленный способ использует радиолокационные средства навигации. Способ радиолокационного определения угла крена летательного аппарата заключается в том, что в точке с известными координатами располагают пассивный радиомаяк, представляющий собой два пространственно разнесенных в горизонтальной плоскости поляризационно-анизотропных трехгранных уголковых отражателя с горизонтальной и вертикальной линейными собственными поляризациями соответственно. С борта летательного аппарата приемо-передающая антенна облучает пассивный радиомаяк линейно поляризованной электромагнитной волной, плоскость поляризации которой фиксированная и составляет угол  с поперечной осью летательного аппарата. Принимают на борту летательного аппарата отраженную электромагнитную волну в линейном поляризационном базисе. Выделяют из принятой волны горизонтально и вертикально линейно поляризованные компоненты и по измеренным их амплитудам на выходе приемника определяют угол крена летательного аппарата. 4 ил.
с поперечной осью летательного аппарата. Принимают на борту летательного аппарата отраженную электромагнитную волну в линейном поляризационном базисе. Выделяют из принятой волны горизонтально и вертикально линейно поляризованные компоненты и по измеренным их амплитудам на выходе приемника определяют угол крена летательного аппарата. 4 ил.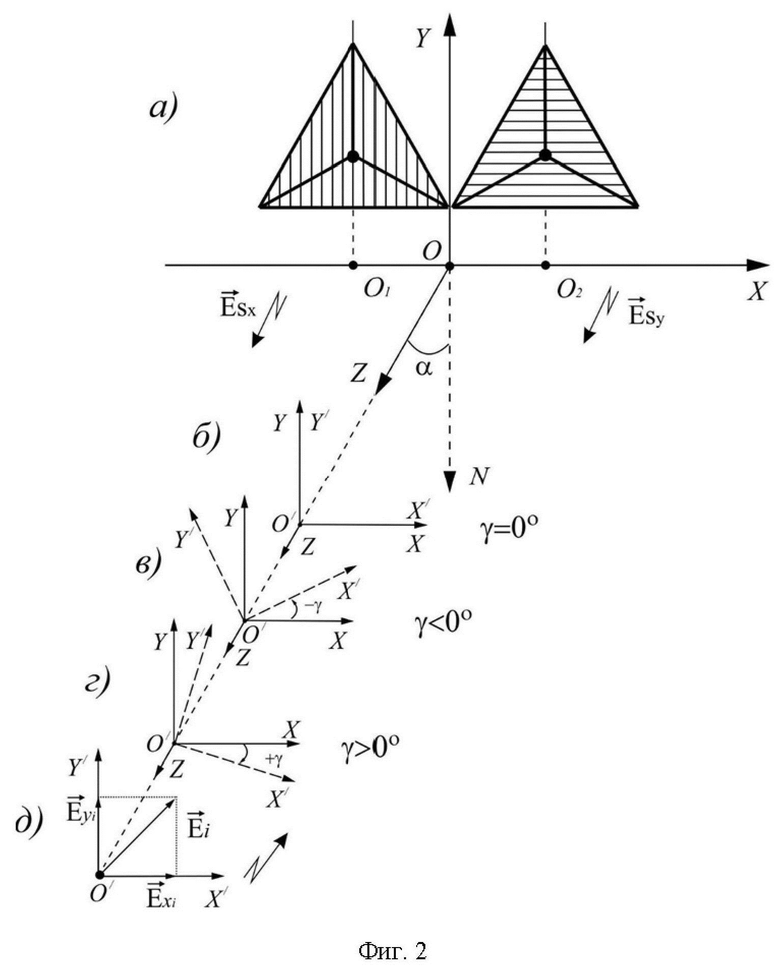
Способ радиолокационного определения угла крена летательного аппарата при его движении на пассивный поляризационно-анизотропный радиолокационный отражатель электромагнитных волн с горизонтальной линейной собственной поляризацией, совпадающей с горизонтальной плоскостью, расположенный в точке с известными координатами, заключающийся в том, что с борта летательного аппарата облучают пассивный поляризационно-анизотропный радиолокационный отражатель с горизонтальной линейной собственной поляризацией линейно-поляризованной электромагнитной волной  на борту летательного аппарата принимают отраженную электромагнитную волну
на борту летательного аппарата принимают отраженную электромагнитную волну  выделяют из принятого сигнала в линейном поляризационном базисе, орты которого совпадают с поперечной и вертикальной строительными осями летательного аппарата, горизонтально линейно поляризованную компоненту
выделяют из принятого сигнала в линейном поляризационном базисе, орты которого совпадают с поперечной и вертикальной строительными осями летательного аппарата, горизонтально линейно поляризованную компоненту  определяют ее амплитуду
определяют ее амплитуду  на выходе приемника, отличающийся тем, что в точке с известными координатами располагают в горизонтальной плоскости пассивный поляризационно-анизотропный радиолокационный отражатель электромагнитных волн с вертикальной линейной собственной поляризацией, совпадающей с перпендикуляром к горизонтальной плоскости, с борта летательного аппарата облучают пассивные поляризационно-анизотропные радиолокационные отражатели с горизонтальной и вертикальной линейными собственными поляризациями линейно поляризованной электромагнитной волной на борту летательного аппарата принимают отраженную поляризационно-анизотропными радиолокационными отражателями электромагнитную волну
на выходе приемника, отличающийся тем, что в точке с известными координатами располагают в горизонтальной плоскости пассивный поляризационно-анизотропный радиолокационный отражатель электромагнитных волн с вертикальной линейной собственной поляризацией, совпадающей с перпендикуляром к горизонтальной плоскости, с борта летательного аппарата облучают пассивные поляризационно-анизотропные радиолокационные отражатели с горизонтальной и вертикальной линейными собственными поляризациями линейно поляризованной электромагнитной волной на борту летательного аппарата принимают отраженную поляризационно-анизотропными радиолокационными отражателями электромагнитную волну  выделяют из принятого сигнала в линейном поляризационном базисе вертикально линейно поляризованную компоненту
выделяют из принятого сигнала в линейном поляризационном базисе вертикально линейно поляризованную компоненту  определяют ее амплитуду
определяют ее амплитуду  на выходе приемника и определяют угол крена
на выходе приемника и определяют угол крена  летательного аппарата между поперечной осью летательного аппарата и горизонтальной плоскостью по формуле:
летательного аппарата между поперечной осью летательного аппарата и горизонтальной плоскостью по формуле:
где  - амплитуда сигнала на выходе приемника вертикально поляризованной компоненты
- амплитуда сигнала на выходе приемника вертикально поляризованной компоненты 
 - амплитуда сигнала на выходе приемника горизонтально поляризованной компоненты
- амплитуда сигнала на выходе приемника горизонтально поляризованной компоненты 
 - положительный угол крена, когда правое крыло летательного аппарата или его поперечная ось находится ниже горизонтальной плоскости;
- положительный угол крена, когда правое крыло летательного аппарата или его поперечная ось находится ниже горизонтальной плоскости;
 - отрицательный угол крена, когда правое крыло летательного аппарата или его поперечная ось находится выше горизонтальной плоскости,
- отрицательный угол крена, когда правое крыло летательного аппарата или его поперечная ось находится выше горизонтальной плоскости,
причем ориентация линейной плоскости поляризации облучающей поляризационно-анизотропные радиолокационные отражатели электромагнитной волны  фиксированная и составляет угол
фиксированная и составляет угол  с поперечной осью летательного аппарата, а приемник ортогонально линейно поляризованных компонент
с поперечной осью летательного аппарата, а приемник ортогонально линейно поляризованных компонент  и
и  имеет линейную амплитудную характеристику и линейный детектор.
имеет линейную амплитудную характеристику и линейный детектор.
| ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННЫЙ СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537384C1 |
| ГУЛЬКО В.Л., МЕЩЕРЯКОВ А.А., БЛИНКОВСКИЙ Н.К | |||
| Радиолокационный метод определения угла крена летательного аппарата // Приборы и техника эксперимента, 2022, N 3, сс | |||
| Ударно-вращательная врубовая машина | 1922 |
|
SU126A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2567240C1 |
| ПОЛЯРИЗАЦИОННО-ФАЗОВЫЙ СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА ПОДВИЖНОГО ОБЪЕКТА И РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2521435C1 |
| Способ определения угловой ориентации летательного аппарата | 2024 |
|
RU2821640C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| CN 114217281 A, 22.03.2022 | |||
| CN 114646933 | |||

