Изобретение относится к радионавигации и может использоваться в пилотажно-навигационных системах ориентации летательного аппарата (ЛА) при заходе на посадку по приборам.
Известные в практической навигации способы и устройства измерения углов крена и тангажа основаны на использовании инерциальных систем навигации, в частности гироскопических систем ориентации [1-4]. Таким способам измерения присущ ряд недостатков. Во-первых, с течением времени происходит постоянное накапливание ошибки измерений и за один час полета она составляет величину единицы градусов [2, 3]. Во-вторых, если ЛА развивает значительные перегрузки, то происходит увеличение собственной скорости прецессии гироскопа, что в ряде случаев может привести к полной потере его работоспособности [2].
Поскольку известные способы измерения угла тангажа основаны на другом физическом принципе, по сравнению с заявляемым, то они не могут рассматриваться в качестве аналогов, так как не имеют общих признаков.
Наиболее близким по совокупности признаков к заявленному способу радиолокационного определения угла тангажа ЛА является поляризационно-модуляционный способ радиолокационного измерения угла крена летательного аппарата [5] (патент № 2537384. Приоритет от 09 июня 2013 г. Опубл. 10.01.2015 Бюл. № 1 автор Гулько В.Л.)
Сущность поляризационно-модуляционного способа радиолокационного измерения угла крена ЛА заключается в следующем
В точке с известными координатами располагают пассивный поляризационно-анизотропный радиолокационный уголковый отражатель УО с горизонтальной линейной собственной поляризацией, совпадающей с горизонтальной плоскостью. Поляризационно-анизотропный радиолокационный УО представляет собой трехгранный УО, состоящий из трех плоских взаимоперпендикулярных металлических или металлизированных треугольных граней, в раскрыв которого помещена вертикально ориентированная поляризационная решетка (ПР) из круглых параллельно расположенных металлических проводников с шагом А и диаметром В [5-8]. Параметры ПР шаг А и диаметр проводников В выбираются такими, что составляющая вектора напряженности электрического поля  падающей электромагнитной волны, плоскость поляризации которой ортогональна ПР и совпадает с горизонтальной плоскостью, проходит через ПР практически не изменяясь, и после трехкратного отражения от треугольных граней трехгранного УО отраженная электромагнитная волна
падающей электромагнитной волны, плоскость поляризации которой ортогональна ПР и совпадает с горизонтальной плоскостью, проходит через ПР практически не изменяясь, и после трехкратного отражения от треугольных граней трехгранного УО отраженная электромагнитная волна  распространяется в направлении обратном направлению падения [5-8]. При этом отраженная от УО электромагнитная волна
распространяется в направлении обратном направлению падения [5-8]. При этом отраженная от УО электромагнитная волна  всегда горизонтально линейно поляризована независимо от угла ориентации плоскости поляризации падающей волны. В тоже время составляющая вектора напряженности электрического поля
всегда горизонтально линейно поляризована независимо от угла ориентации плоскости поляризации падающей волны. В тоже время составляющая вектора напряженности электрического поля  плоскость поляризации которой параллельна металлическим проводникам ПР и находится в вертикальной плоскости, полностью отражается от ПР как от плоской металлической пластины [5-8]. Такой, трехгранный УО с размещенной в плоскости раскрыва УО вертикально ориентированной ПР представляет собой поляризационно-анизотропный объект и его матрица рассеяния (МР) в линейном поляризационном базисе имеет вид [5-8]
плоскость поляризации которой параллельна металлическим проводникам ПР и находится в вертикальной плоскости, полностью отражается от ПР как от плоской металлической пластины [5-8]. Такой, трехгранный УО с размещенной в плоскости раскрыва УО вертикально ориентированной ПР представляет собой поляризационно-анизотропный объект и его матрица рассеяния (МР) в линейном поляризационном базисе имеет вид [5-8]

где  - максимально возможная ЭПР поляризационно-анизотропного УО при облучении его линейно горизонтально поляризованной электромагнитной волной.
- максимально возможная ЭПР поляризационно-анизотропного УО при облучении его линейно горизонтально поляризованной электромагнитной волной.
Из анализа (1) следует, что в линейном поляризационном базисе вырожденная МР (1) трехгранного УО, в раскрыве которого помещена вертикально ориентированная ПР эквивалентна МР ярко выраженному поляризационно-анизотропному радиолокационному объекту, представляющему собой горизонтальный вибратор [5-8].
При движении ЛА на пассивный поляризационно-анизотропный радиолокационный УО с МР (1) и облучении его с борта ЛА линейно поляризованной электромагнитной волной, вектор напряженности электрического поля  который вращается с частотой
который вращается с частотой  , отраженная от граней УО электромагнитная волна независимо от угла ориентации плоскости поляризации падающей волны будет всегда поляризована линейно горизонтально и, соответственно, вектор напряженности электромагнитного поля отраженной от УО электромагнитной волны будет всегда совпадать с горизонтальной плоскостью [5-8]. При этом интенсивность отраженной и, соответственно принятой на борту ЛА, электромагнитной волны будет изменяться с частотой
, отраженная от граней УО электромагнитная волна независимо от угла ориентации плоскости поляризации падающей волны будет всегда поляризована линейно горизонтально и, соответственно, вектор напряженности электромагнитного поля отраженной от УО электромагнитной волны будет всегда совпадать с горизонтальной плоскостью [5-8]. При этом интенсивность отраженной и, соответственно принятой на борту ЛА, электромагнитной волны будет изменяться с частотой  от некоторого максимума, при совпадении горизонтальной линейной поляризации излученной электромагнитной волны с собственной горизонтальной поляризацией поляризационно-анизотропного УО, до минимума, при вертикальной ориентации плоскости поляризации излученной электромагнитной волны [5,8]. Однако, эти условия соблюдаются только в том случае, когда поперечная ось ЛА находится в горизонтальной плоскости, т.е. крен ЛА отсутствует и, соответственно, излученная горизонтально линейно поляризованная электромагнитная волна и принятая на борту ЛА электромагнитная волна совпадают по поляризации и их плоскости поляризации совпадают с горизонтальной плоскостью [5]. В тех случаях, когда крен ЛА отличен от нуля, т.е. поперечная ось ЛА не находится в горизонтальной плоскости, то угловые положения плоскости поляризации излученной линейно поляризованной электромагнитной волны, при которых достигаются максимум или минимум интенсивности отраженной от УО электромагнитной волны и, соответственно, принятой на борту ЛА электромагнитной волны, смещаются и определяются креном ЛА [5,8]. При этом плоскость поляризации отраженной от УО электромагнитной волны по прежнему горизонтальная и находится в горизонтальной плоскости, а плоскость поляризации принятой на борту ЛА электромагнитной волны не совпадает с горизонтальной плоскостью и ее угол ориентации определяется величиной угла крена ЛА, что определяет физическую основу измерений его угла крена [5, 8].
от некоторого максимума, при совпадении горизонтальной линейной поляризации излученной электромагнитной волны с собственной горизонтальной поляризацией поляризационно-анизотропного УО, до минимума, при вертикальной ориентации плоскости поляризации излученной электромагнитной волны [5,8]. Однако, эти условия соблюдаются только в том случае, когда поперечная ось ЛА находится в горизонтальной плоскости, т.е. крен ЛА отсутствует и, соответственно, излученная горизонтально линейно поляризованная электромагнитная волна и принятая на борту ЛА электромагнитная волна совпадают по поляризации и их плоскости поляризации совпадают с горизонтальной плоскостью [5]. В тех случаях, когда крен ЛА отличен от нуля, т.е. поперечная ось ЛА не находится в горизонтальной плоскости, то угловые положения плоскости поляризации излученной линейно поляризованной электромагнитной волны, при которых достигаются максимум или минимум интенсивности отраженной от УО электромагнитной волны и, соответственно, принятой на борту ЛА электромагнитной волны, смещаются и определяются креном ЛА [5,8]. При этом плоскость поляризации отраженной от УО электромагнитной волны по прежнему горизонтальная и находится в горизонтальной плоскости, а плоскость поляризации принятой на борту ЛА электромагнитной волны не совпадает с горизонтальной плоскостью и ее угол ориентации определяется величиной угла крена ЛА, что определяет физическую основу измерений его угла крена [5, 8].
Тогда, вращение плоскости поляризации излучаемой электромагнитной волны с частотой приведет к амплитудной модуляции с частотой  принятой на борту ЛА электромагнитной волны. Выделение из амплитуды принятого сигнала на выходе приемника спектральной составляющей на частоте
принятой на борту ЛА электромагнитной волны. Выделение из амплитуды принятого сигнала на выходе приемника спектральной составляющей на частоте  и измерение ее фазы относительно удвоенного углового положения плоскости поляризации излученной электромагнитной волны позволит измерить угол крена ЛА. Установим эту связь.
и измерение ее фазы относительно удвоенного углового положения плоскости поляризации излученной электромагнитной волны позволит измерить угол крена ЛА. Установим эту связь.
Используя формализм векторов и матриц Джонса [9], было установлено [5], что при движении ЛА с креном  на пассивный поляризационно-анизотропный УО с МР (1) и облучении его линейно поляризованной волной плоскость поляризации которой вращается с частотой , и приеме электромагнитной волны в линейном поляризационном базисе, орты которого совпадают с вертикальной и поперечной строительными осями ЛА, то амплитуда сигнала на выходе приемника, имеющего логарифмическую амплитудную характеристику и линейный детектор будет равна [5, 8]
на пассивный поляризационно-анизотропный УО с МР (1) и облучении его линейно поляризованной волной плоскость поляризации которой вращается с частотой , и приеме электромагнитной волны в линейном поляризационном базисе, орты которого совпадают с вертикальной и поперечной строительными осями ЛА, то амплитуда сигнала на выходе приемника, имеющего логарифмическую амплитудную характеристику и линейный детектор будет равна [5, 8]

где С - постоянная величина, учитывающая потенциал передатчика, расстояние от передатчика до поляризационно-анизотропного УО и обратно, его максимально возможную ЭПР и чувствительность приемника.
Как отмечается в [5, 8] соотношение (2) справедливо для случая когда ЛА двигается на пассивный поляризационно-анизотропный УО и исходная излучаемая передатчиком электромагнитная волна горизонтально поляризована и ее плоскость поляризации совпадает с поперечной осью ЛА.
Из анализа (2) видим, что в спектре огибающей выходного сигнала логарифмического приемника присутствует спектральная составляющая на частоте и ее фаза  определяется только углом крена
определяется только углом крена  ЛА по формуле [5, 8]
ЛА по формуле [5, 8]

где  - положительный угол крена , когда правое крыло или поперечная ось ЛА находится ниже горизонтальной плоскости,
- положительный угол крена , когда правое крыло или поперечная ось ЛА находится ниже горизонтальной плоскости,
 - отрицательный угол крена , когда правое крыло или поперечная ось ЛА находится выше горизонтальной плоскости.
- отрицательный угол крена , когда правое крыло или поперечная ось ЛА находится выше горизонтальной плоскости.
Фаза отсчитывается относительно фазы опорного сигнала  определяемой угловым положением плоскости поляризации излучаемого сигнала.
определяемой угловым положением плоскости поляризации излучаемого сигнала.
Амплитуда этой спектральной составляющей на частоте может быть найдена как [5, 8]

С учетом того, что уровень сигнала при наличии логарифмического приемника обычно измеряют в децибелах, получим, что амплитуда спектральной составляющей максимальна и равна [5, 8]

Отмечается [5], что амплитуда  не зависит от крена ЛА и ее максимальное значение постоянно и определяется соотношением (5). Как следует из (2-5) амплитуда
не зависит от крена ЛА и ее максимальное значение постоянно и определяется соотношением (5). Как следует из (2-5) амплитуда  и фаза спектральной составляющей на частоте не зависят от мощности передатчика, расстояния от передатчика до поляризационно-анизотропного УО и обратно, ЭПР УО и чувствительности приемника. Энергетические параметры определяют постоянную составляющую сигнала на выходе логарифмического приемника бортовой РЛС.
и фаза спектральной составляющей на частоте не зависят от мощности передатчика, расстояния от передатчика до поляризационно-анизотропного УО и обратно, ЭПР УО и чувствительности приемника. Энергетические параметры определяют постоянную составляющую сигнала на выходе логарифмического приемника бортовой РЛС.
Недостаток рассмотренного поляризационно-модуляционного способа радиолокационного измерения угла крена ЛА заключается в том, что он не позволяет измерять угол тангажа ЛА.
Использование поляризационных характеристик излучаемых сигналов, а также использование поляризационных характеристик рассеяния поляризационно-анизотропного радиолокационного УО (радиомаяка) для оценки угла тангажа ЛА обуславливает необходимость их рассмотрения в конкретных поляризационных базисах и в различных системах координат, связанных с пассивным радиомаяком и ЛА. При этом выбор опорной системы координат (О.С.К.), связанной с радиомаяком, собственной системы координат (С.С.К.), связанной со строительными осями ЛА, а также выбор алгоритма обработки поляризационно-модулированных сигналов определяется как особенностями решаемой технической задачи, так и удобством анализа с точки зрения физической интерпретации полученных результатов.
На фиг. 1 представлен пассивный поляризационно-анизотропный радиолокационный УО электромагнитных волн с горизонтальной линейной собственной поляризацией, расположенный в точке О с известными координатами. Позиция 1 - трехгранный УО вид спереди. Позиция 2 - вертикально ориентированная ПР из параллельно расположенных металлических проводников с шагом решетки А и диаметром проводников В. Позиция 3 - вид сбоку.
На фиг. 2 представлены пояснения к способу радиолокационного определения угла тангажа ЛА.
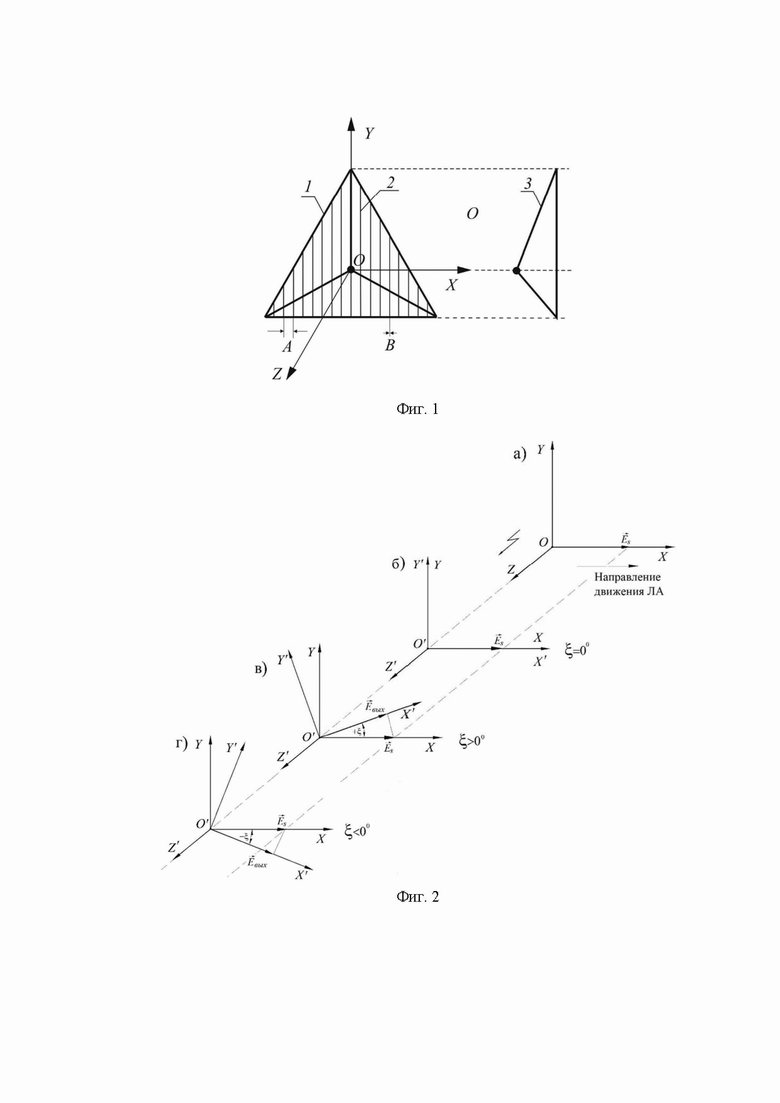
На фиг. 3 представлена зависимость амплитуды выходного сигнала логарифмического приемника от углового положения  плоскости поляризации излученного сигнала для различных значений угла тангажа
плоскости поляризации излученного сигнала для различных значений угла тангажа  Позиции 1-3 соответствуют значению угла тангажа
Позиции 1-3 соответствуют значению угла тангажа  равным
равным  .
.
Сущность заявляемого способа радиолокационного определения угла тангажа ЛА заключается в следующем.
Расположим в точке О с известными координатами пассивный радиомаяк в виде поляризационно-анизотропного радиолокационного УО с горизонтальной линейной собственной поляризацией (фиг. 1). Радиолокационный УО выполнен в виде трехгранного УО, состоящего из трех плоских взаимно перпендикулярных металлических или металлизированных треугольных граней одинакового размера, значительно превышающего длину волны. Введем декартову О.С.К., оси OX и OZ которой находятся в горизонтальной плоскости XOZ, а ось OY перпендикулярна ей. Вершину УО поместим в начало О.С.К. точку О. (см. фиг. 1). Для придания поляризационно-изотропному радиолокационному УО поляризационно-анизотропных свойств с горизонтальной линейной собственной поляризацией в раскрыве УО размещена вертикально ориентированная ПР из параллельных металлических проводников с шагом решетки А и диаметром проводников В [5,8]. Параметры А и В ПР выбираются такими [5,8], чтобы составляющая вектора напряженности электрического поля  падающей электромагнитной волны, плоскость поляризации которой ортогональна ПР и совпадает с горизонтальной плоскость XOZ, проходит через ПР практически не изменяясь и, после трехкратного отражения от треугольных граней трехгранного УО отраженная электромагнитная волна
падающей электромагнитной волны, плоскость поляризации которой ортогональна ПР и совпадает с горизонтальной плоскость XOZ, проходит через ПР практически не изменяясь и, после трехкратного отражения от треугольных граней трехгранного УО отраженная электромагнитная волна  распространяется в направлении обратном направлению падения. При этом отраженная от УО электромагнитная волна всегда горизонтально линейно поляризована и ее плоскость поляризации совпадает с горизонтальной плоскости XOZ и ее фазовый центр рассеяния находится в вершине УО, расположенной в точке О. В тоже время составляющая вектора напряженности электрического поля
распространяется в направлении обратном направлению падения. При этом отраженная от УО электромагнитная волна всегда горизонтально линейно поляризована и ее плоскость поляризации совпадает с горизонтальной плоскости XOZ и ее фазовый центр рассеяния находится в вершине УО, расположенной в точке О. В тоже время составляющая вектора напряженности электрического поля  плоскость поляризации которой параллельна металлическим проводникам ПР и находится в вертикальной плоскости УО, полностью отражается от ПР как от плоской металлической пластины [5-8]. Такой, трехгранный УО с размещенной в плоскости раскрыва УО вертикально ориентированной ПР представляет собой поляризационно-анизотропный горизонтальный вибратор с горизонтальной собственной поляризацией. Его матрица рассеяния в собственной О.С.К. в линейном поляризационном базисе может быть представлена в виде (1) [5-8].
плоскость поляризации которой параллельна металлическим проводникам ПР и находится в вертикальной плоскости УО, полностью отражается от ПР как от плоской металлической пластины [5-8]. Такой, трехгранный УО с размещенной в плоскости раскрыва УО вертикально ориентированной ПР представляет собой поляризационно-анизотропный горизонтальный вибратор с горизонтальной собственной поляризацией. Его матрица рассеяния в собственной О.С.К. в линейном поляризационном базисе может быть представлена в виде (1) [5-8].
Пусть ЛА находится в точке  и движется вдоль положительного направления оси ОХ О.С.К. ХОУ и его углы крена и рыскания равны нулю (см. фиг. 2). С борта ЛА, приемо-передающая антенна, ось симметрии диаграммы направленности которой перпендикулярна направлению движения, облучает поляризационно-анизотропный радиолокационный УО с МР (1) линейно поляризованной электромагнитной волной, вектор напряженности электрического поля
и движется вдоль положительного направления оси ОХ О.С.К. ХОУ и его углы крена и рыскания равны нулю (см. фиг. 2). С борта ЛА, приемо-передающая антенна, ось симметрии диаграммы направленности которой перпендикулярна направлению движения, облучает поляризационно-анизотропный радиолокационный УО с МР (1) линейно поляризованной электромагнитной волной, вектор напряженности электрического поля  которой вращается с частотой
которой вращается с частотой  Тогда отраженная от треугольных граней трехгранного УО электромагнитная волна независимо от угла ориентации плоскости поляризации падающей волны, будет всегда иметь горизонтальную линейную поляризацию, вектор напряженности электрического поля которой совпадает с осью
Тогда отраженная от треугольных граней трехгранного УО электромагнитная волна независимо от угла ориентации плоскости поляризации падающей волны, будет всегда иметь горизонтальную линейную поляризацию, вектор напряженности электрического поля которой совпадает с осью  О.С.К. и находится в горизонтальной плоскости
О.С.К. и находится в горизонтальной плоскости  (фиг. 2 а.). При этом максимум амплитуды отраженной волны от поляризационно-анизотропного УО будет наблюдаться при совпадении горизонтальной линейной поляризации излученной электромагнитной волны с собственной горизонтальной линейной поляризацией поляризационно-анизотропного УО, которая всегда находится в горизонтальной плоскости XOZ. Очевидно, что минимум амплитуды отраженной электромагнитной волны будет наблюдаться при вертикальной ориентации плоскости поляризации излученной электромагнитной волны. Тогда за полный оборот вращения плоскости поляризации излученной волны с частотой
(фиг. 2 а.). При этом максимум амплитуды отраженной волны от поляризационно-анизотропного УО будет наблюдаться при совпадении горизонтальной линейной поляризации излученной электромагнитной волны с собственной горизонтальной линейной поляризацией поляризационно-анизотропного УО, которая всегда находится в горизонтальной плоскости XOZ. Очевидно, что минимум амплитуды отраженной электромагнитной волны будет наблюдаться при вертикальной ориентации плоскости поляризации излученной электромагнитной волны. Тогда за полный оборот вращения плоскости поляризации излученной волны с частотой  , амплитуда отраженной и, соответственно, принятой на борту ЛА волны будет промодулирована с частотой
, амплитуда отраженной и, соответственно, принятой на борту ЛА волны будет промодулирована с частотой  от некоторого максимума при совпадении горизонтальной линейной поляризации излученной электромагнитной волны с собственной горизонтальной поляризацией поляризационно-анизотропного УО, до минимума, при вертикальной ориентации плоскости поляризации излученной электромагнитной волны. Однако, эти условия соблюдаются только в том случае, когда угол тангажа
от некоторого максимума при совпадении горизонтальной линейной поляризации излученной электромагнитной волны с собственной горизонтальной поляризацией поляризационно-анизотропного УО, до минимума, при вертикальной ориентации плоскости поляризации излученной электромагнитной волны. Однако, эти условия соблюдаются только в том случае, когда угол тангажа  ЛА равен нулю. Исследуем случаи когда тангаж
ЛА равен нулю. Исследуем случаи когда тангаж  . Для этого определим С.С.К. связанную с корпусом ЛА как подвижную декартову систему координат
. Для этого определим С.С.К. связанную с корпусом ЛА как подвижную декартову систему координат  , образованную продольной
, образованную продольной  , вертикальной
, вертикальной  и поперечной
и поперечной  строительными осями ЛА. Начало ее поместим в точку , совпадающую с центром масс ЛА. Очевидно, что когда тангаж ЛА отсутствует, т.е.
строительными осями ЛА. Начало ее поместим в точку , совпадающую с центром масс ЛА. Очевидно, что когда тангаж ЛА отсутствует, т.е.  направление продольной оси и положительное направление оси О.С.К. совпадают с направлением вектора электрического поля отраженной от поляризационно-анизотропного УО волны, и они лежат в горизонтальной плоскости (см. фиг. 2 б). Соответственно, излученная горизонтально линейно поляризованная электромагнитная волна и принятая на борту ЛА электромагнитная волна совпадают с вектором по поляризации и находятся в горизонтальной плоскости .
направление продольной оси и положительное направление оси О.С.К. совпадают с направлением вектора электрического поля отраженной от поляризационно-анизотропного УО волны, и они лежат в горизонтальной плоскости (см. фиг. 2 б). Соответственно, излученная горизонтально линейно поляризованная электромагнитная волна и принятая на борту ЛА электромагнитная волна совпадают с вектором по поляризации и находятся в горизонтальной плоскости .
Когда  продольная ось С.С.К. ЛА будет повернута почасовой или против часовой стрелке в плоскости
продольная ось С.С.К. ЛА будет повернута почасовой или против часовой стрелке в плоскости  О.С.К. на угол, равный углу тангажа
О.С.К. на угол, равный углу тангажа  (см. фиг. 2 в и 2 г. ), т.е. продольная ось ЛА не находится в горизонтальной плоскости , то угловые положения плоскости поляризации излученной линейно поляризованной электромагнитной волны, при которых достигаются максимум или минимум интенсивности отраженной от УО электромагнитной волны, и, соответственно, принятой на борту ЛА электромагнитной волны смещаются и определяются тангажем ЛА. При этом плоскость поляризации отражённой от УО электромагнитной волны по прежнему горизонтальная и находится в горизонтальной плоскости XOZ. А плоскости поляризации излученной и, соответственно, принятой на борту ЛА электромагнитной волн не будут совпадать с горизонтальной плоскостью и их угол ориентации плоскости поляризации будет определяться углом тангажа , что и определяет физическую основу его измерений. Таким образом, возникновение тангажа ЛА эквивалентно операции поворота С.С.К.ЛА в ту или другую сторону на угол относительно О.С.К. в плоскости . Сама операция поворота С.С.К. может быть определена с помощью соответствующих операторов поворота [6,7], которые будут рассмотрены ниже.
(см. фиг. 2 в и 2 г. ), т.е. продольная ось ЛА не находится в горизонтальной плоскости , то угловые положения плоскости поляризации излученной линейно поляризованной электромагнитной волны, при которых достигаются максимум или минимум интенсивности отраженной от УО электромагнитной волны, и, соответственно, принятой на борту ЛА электромагнитной волны смещаются и определяются тангажем ЛА. При этом плоскость поляризации отражённой от УО электромагнитной волны по прежнему горизонтальная и находится в горизонтальной плоскости XOZ. А плоскости поляризации излученной и, соответственно, принятой на борту ЛА электромагнитной волн не будут совпадать с горизонтальной плоскостью и их угол ориентации плоскости поляризации будет определяться углом тангажа , что и определяет физическую основу его измерений. Таким образом, возникновение тангажа ЛА эквивалентно операции поворота С.С.К.ЛА в ту или другую сторону на угол относительно О.С.К. в плоскости . Сама операция поворота С.С.К. может быть определена с помощью соответствующих операторов поворота [6,7], которые будут рассмотрены ниже.
Пусть ЛА имеет в общем случае тангаж и с борта ЛА приемо-передающая антенна, ось симметрии диаграммы направленности которой перпендикулярна направлению движения, облучает пассивный поляризационно-анизотропный УО с МР (1) сигналом, плоскость поляризации которого вращается с частотой  . Тогда, используя формализм векторов и матриц Джонса [9], найдем вектор Джонса принятого сигнала на выходе линейного поляризатора в линейном поляризационном базисе орты которого совпадают с вертикальной и продольной строительными осями ЛА с помощью преобразований вида:
. Тогда, используя формализм векторов и матриц Джонса [9], найдем вектор Джонса принятого сигнала на выходе линейного поляризатора в линейном поляризационном базисе орты которого совпадают с вертикальной и продольной строительными осями ЛА с помощью преобразований вида:

где  - вектор Джонса исходной горизонтально линейно поляризованной волны, излучаемой передатчиком, совпадающий с продольной осью ЛА;
- вектор Джонса исходной горизонтально линейно поляризованной волны, излучаемой передатчиком, совпадающий с продольной осью ЛА;
 - оператор Джонса вращателя линейной плоскости поляризации излученной электромагнитной волны на угол
- оператор Джонса вращателя линейной плоскости поляризации излученной электромагнитной волны на угол  (-частота вращения,
(-частота вращения,  - время) [9];
- время) [9];
 - прямой оператор поворота на угол тангажа
- прямой оператор поворота на угол тангажа  ;
;
 - положительный угол тангажа, когда продольная ось ЛА находится выше горизонтальной плоскости [4],
- положительный угол тангажа, когда продольная ось ЛА находится выше горизонтальной плоскости [4],
 - отрицательный угол тангажа, когда продольная ось ЛА находится ниже горизонтальной плоскости [4];
- отрицательный угол тангажа, когда продольная ось ЛА находится ниже горизонтальной плоскости [4];
 - МР поляризационно-анизотропного УО с горизонтальной линейной собственной поляризацией (1), всегда совпадающая с горизонтальной плоскостью ;
- МР поляризационно-анизотропного УО с горизонтальной линейной собственной поляризацией (1), всегда совпадающая с горизонтальной плоскостью ;
 - обратный оператор поворота на угол тангажа
- обратный оператор поворота на угол тангажа  ЛА;
ЛА;
 - оператор Джонса вращателя плоскости поляризации принимаемой на борту ЛА электромагнитной волны на угол
- оператор Джонса вращателя плоскости поляризации принимаемой на борту ЛА электромагнитной волны на угол  .
.
 - оператор линейного поляризатора (переход с круглого волновода на прямоугольный волновод) с горизонтальной линейной собственной поляризацией, совпадающей с продольной осью ЛА;
- оператор линейного поляризатора (переход с круглого волновода на прямоугольный волновод) с горизонтальной линейной собственной поляризацией, совпадающей с продольной осью ЛА;
С - постоянная величина, учитывающая потенциал передатчика, расстояние от передатчика до поляризационно-анизотропного УО и обратно, его максимально возможную ЭПР  и чувствительность приемника.
и чувствительность приемника.
Выполнив в (6) необходимые матричные вычисления, получим вектора Джонса принятого сигнала на выходе линейного поляризатора в виде:

Тогда сигнал непосредственно на входе приемника будут иметь вид:

Амплитуда сигнала на выходе приемника с логарифмической амплитудной характеристикой и линейным детектором как функция угла ° будет равна

После преобразований (9) при  получим
получим

С учетом того, что амплитуда сигнала в случае логарифмического приемника обычно измеряют в децибелах, получим

Соотношение (11) позволяет рассчитать зависимость амплитуды выходного сигнала логарифмического приемника от углового положения  плоскости поляризации излучаемого сигнала для различных значений угла тангажа
плоскости поляризации излучаемого сигнала для различных значений угла тангажа  Результаты расчета приведены на фиг. 3. Позиции 1-3 соответствуют значениям угла тангажа
Результаты расчета приведены на фиг. 3. Позиции 1-3 соответствуют значениям угла тангажа  равным
равным 
Из анализа фиг. 3 следует, что амплитуда сигнала на выходе приемника промодулирована удвоенной частотой вращения плоскости поляризации излучаемого сигнала. При этом амплитудная модуляция сигнала достигает 100%-ной глубины и не зависит от тангажа ЛА, а определяет только его сдвиг по фазе на удвоенный угол тангажа ЛА. Поэтому в спектре огибающей выходного сигнала логарифмического приемника присутствует спектральная составляющая на частоте  Ее амплитуду
Ее амплитуду  с учетом (11), можно найти с помощью фурье-преобразования вида
с учетом (11), можно найти с помощью фурье-преобразования вида

После вычисления амплитуда будет равна 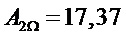 дБ и независит от угла тангажа. А ее фаза , с учетом (10), связана с углом тангажа ЛА соотношением:
дБ и независит от угла тангажа. А ее фаза , с учетом (10), связана с углом тангажа ЛА соотношением:

где знак «+» соответствует положительному углу тангажа, знак «-» - отрицательному.
Фаза отсчитывается относительно фазы опорного сигнала 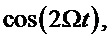 определяемой угловым положением плоскости поляризации излучаемого сигнала. Необходимо также отметить, что амплитуда
определяемой угловым положением плоскости поляризации излучаемого сигнала. Необходимо также отметить, что амплитуда  и фаза не зависят от потенциала передатчика, чувствительности приемника, расстояния от ЛА до пассивного радиомаяка и его эффективной поверхности рассеяния
и фаза не зависят от потенциала передатчика, чувствительности приемника, расстояния от ЛА до пассивного радиомаяка и его эффективной поверхности рассеяния  . Энергетические параметры определяют постоянную составляющую сигнала на выходе логарифмического приемника бортовой РЛС.
. Энергетические параметры определяют постоянную составляющую сигнала на выходе логарифмического приемника бортовой РЛС.
Использование заявляемой совокупности признаков для определения угла тангажа ЛА в известных решениях авторами не обнаружено.
В 3-х см диапазоне длин волн заявляемый способ радиолокационного определения угла тангажа летательного аппарата может быть реализован следующим образом.
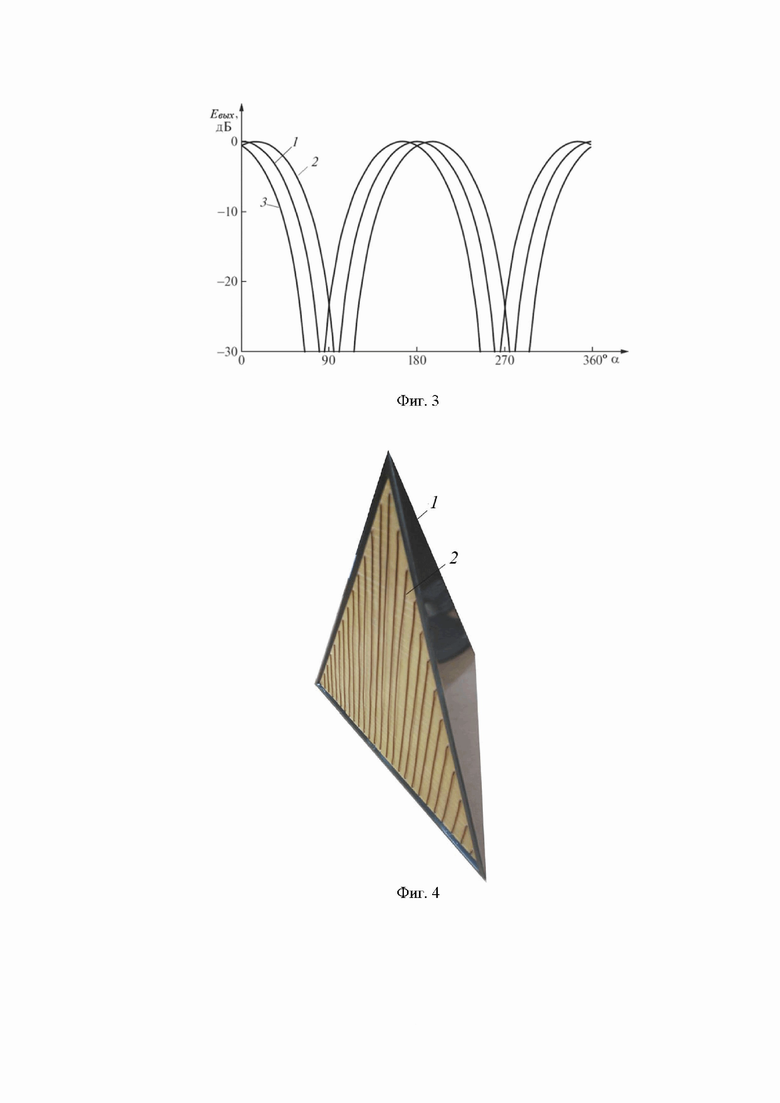
На фиг. 4 представлен вариант исполнения поляризационно-анизотропного радиолокационного УО с горизонтальной собственной поляризацией. Трехгранный УО с треугольными отражающими гранями, входящий в состав поляризационно-анизотропного УО, может быть выполнен из фольгированного стеклотекстолита. Поляризационная решетка может быть выполнена из нефольгированного стеклотекстолита с расположенными на ней параллельно и вертикально расположенными медными проводниками с параметрами А = 8 мм, В = 0,8 мм [5, 8]. Позиция 1 - трехгранный УО, позиция 2 - вертикально ориентированная ПР.
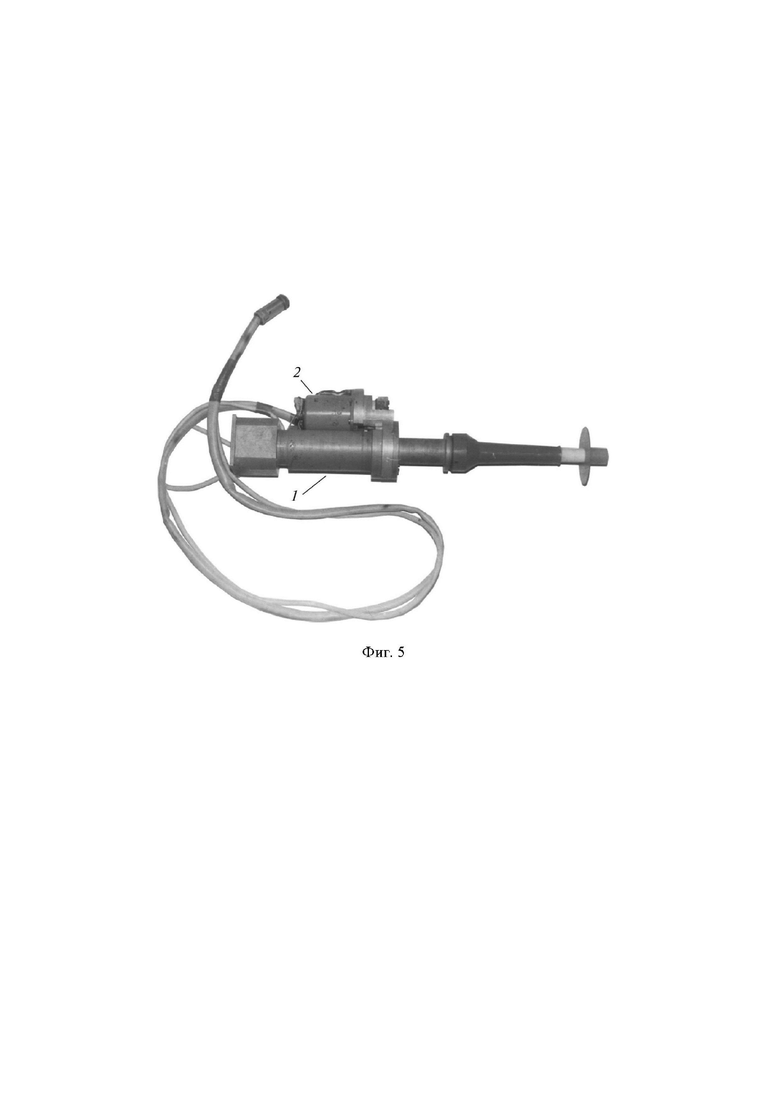
На фиг. 5 представлен вариант исполнения вращателя плоскости поляризации или поляризационного модулятора выполненного на базе штатного облучателя приемо-передающей антенны, входящей в состав бортовой самолетной РЛС «Гроза-26» [5,8,10]. В состав поляризационного модулятора входит вращающаяся секция круглого волновода со встроенной внутрь полуволновой фазовой пластиной  , осуществляющей вращение линейной плоскости поляризации излучаемого сигнала. Позиция 1. Вращение секции осуществляется шаговым микродвигателем типа ДШ - 0,025 А. Позиция 2 [5,8].
, осуществляющей вращение линейной плоскости поляризации излучаемого сигнала. Позиция 1. Вращение секции осуществляется шаговым микродвигателем типа ДШ - 0,025 А. Позиция 2 [5,8].
Основные функциональные элементы включающие в себя: передатчик излучаемых сигналов, антенный переключатель, приемо-передающая антенна, синхронизатор, логарифмический приемник, временной селектор, пиковый детектор, полосовой фильтр, фазовый детектор могут быть выполнены с помощью известных технических решений, широко используемых в бортовых РЛС обзора земной поверхности, применяемых на ЛА [5,8,10]. Вариант исполнения на базе самолетной РЛС «Гроза-26» представлен и описан в [5,8].
По сравнению с прототипом заявляемый радиолокационный способ позволяет определять угол тангажа ЛА и по сравнению с широко используемыми в практической навигации способами измерения угла тангажа ЛА, основанными на использовании гироскопических систем ориентации, заявляемый способ радиолокационного определения угла тангажа ЛА позволяет избежать постоянного накапливания с течением времени ошибки измерения. Кроме того, использование радиолокационных отражателей с ярко выраженными поляризационно-анизотропными свойствами в качестве пассивных маркерных радиолокационных маяков при заходе на посадку ЛА на необорудованные полосы позволит снизить затраты на их обслуживание, так как пассивные маяки не требуют электропитания.
Использованные источники информации:
1. Skrypnik O.N. Radio Navigation Systems for Airports and Airways (Singapore:Springer). 2019.- 239p.
2. Пельпор Д.С., Ягодкин В.В. Гироскопические системы - М.: Высшая школа, 1988.
3. Александров А.С., Арно Г.Р. и др. Современное состояние и тенденции развития зарубежных средств и систем навигации подвижных объектов военного и гражданского назначения. - Санкт-Петербург, 1994. – 119 с.
4. Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь. 1985. - 345 с.
5. Гулько В.Л. Патент Ru 2537384, МПК G01S 13/93, Б.И. №1 опубл. 10.01.2015.
6. Кобак В.О. Радиолокационные отражатели. - М.: «Сов. Радио и связь» 1975. - 248 с.
7. Бадулин Н.Н., Гулько В.Л., Масалов Е.В. Внешняя калибровка радиолокационных поляриметров с помощью пассивных отражателей. - Изв. Вузов радиоэлектроника, т. 29, №11, 1986. С. 81-82.
8. Гулько В.Л., Мещеряков А.А., Блинковский Н.К. Радиолокационный метод определения угла крена летательного аппарата.// Приборы и техника эксперимента, 2022, № 3, С. 126-134.
9. Аззам Р., Башара Н. Эллипсометрия и поляризованный свет - М.: МИР. 1981. - 583 с.
10. Давыдов П.С. Радиолокационные системы воздушных судов. - М.: Транспорт, 1988. - 359 с.
Изобретение относится к радионавигации и может использоваться в системах посадки летательных аппаратов по приборам. Технический результат заключается в измерении угла тангажа летательного аппарата радиолокационным способом и в исключении постоянного накапливания с течением времени ошибки измерения. Заявленный способ использует радиолокационные средства навигации и заключается в том, что в точке с известными координатами располагают пассивный поляризационно-анизотропный радиолокационный уголковый отражатель электромагнитных волн с горизонтальной линейной собственной поляризацией. С борта летательного аппарата приемо-передающая антенна, ось симметрии диаграммы направленности которой перпендикулярна направлению движения летательного аппарата, облучает радиолокационный уголковый отражатель линейно поляризованной электромагнитной волной, плоскость поляризации которой вращается с некоторой частотой. На борту летательного аппарата принимают отраженную электромагнитную волну, поляризация которой совпадает с поляризацией излученной электромагнитной волны. Прием электромагнитных волн осуществляется в линейном поляризационном базисе, орты которого совпадают с вертикальной и продольной строительными осями летательного аппарата. По измеренной на выходе приемника фазе спектральной составляющей на удвоенной частоте вращения плоскости поляризации принимаемых сигналов определяют угол тангажа летательного аппарата. 5 ил.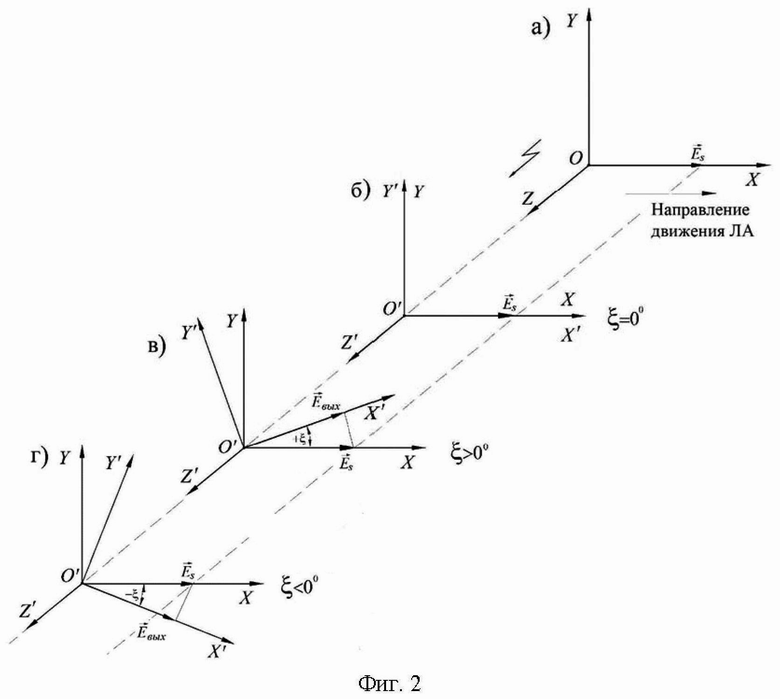
Способ радиолокационного определения угла тангажа летательного аппарата при его движении в известном направлении, заключающийся в том, что в точке с известными координатами располагают пассивный поляризационно-анизотропный радиолокационный отражатель электромагнитных волн с горизонтальной линейной собственной поляризацией, совпадающей с горизонтальной плоскостью, с борта летательного аппарата облучают пассивный поляризационно-анизотропный радиолокационный отражатель линейно поляризованной электромагнитной волной, плоскость поляризации которой вращается с частотой  на борту летательного аппарата принимают отраженную поляризационно-анизотропным радиолокационным отражателем электромагнитную волну, поляризация которой совпадает с поляризацией излученной электромагнитной волны, выделяют из принятого сигнала в линейном ортогональном поляризационном базисе горизонтально линейно поляризованную компоненту, определяют амплитуду выходного сигнала приемника, имеющего логарифмическую амплитудную характеристику и линейный детектор, выделяют из выходного сигнала логарифмического приемника спектральную составляющую на частоте
на борту летательного аппарата принимают отраженную поляризационно-анизотропным радиолокационным отражателем электромагнитную волну, поляризация которой совпадает с поляризацией излученной электромагнитной волны, выделяют из принятого сигнала в линейном ортогональном поляризационном базисе горизонтально линейно поляризованную компоненту, определяют амплитуду выходного сигнала приемника, имеющего логарифмическую амплитудную характеристику и линейный детектор, выделяют из выходного сигнала логарифмического приемника спектральную составляющую на частоте  измеряют ее фазу
измеряют ее фазу  относительно удвоенного углового положения плоскости поляризации излученной электромагнитной волны, отличающийся тем, что на борту летательного аппарата ось симметрии диаграммы направленности приемо-передающей антенны перпендикулярна направлению движения летательного аппарата, орты линейного ортогонального поляризационного базиса совпадают с продольной и вертикальной строительными осями летательного аппарата, определяют амплитуду,
относительно удвоенного углового положения плоскости поляризации излученной электромагнитной волны, отличающийся тем, что на борту летательного аппарата ось симметрии диаграммы направленности приемо-передающей антенны перпендикулярна направлению движения летательного аппарата, орты линейного ортогонального поляризационного базиса совпадают с продольной и вертикальной строительными осями летательного аппарата, определяют амплитуду,

где С - постоянная величина, учитывающая потенциал передатчика, расстояние от передатчика до поляризационно-анизотропного радиолокационного отражателя и обратно, его эффективную площадь рассеяния (ЭПР) и чувствительность приемника, определяют угол тангажа  летательного аппарата между продольной осью летательного аппарата и горизонтальной плоскостью по формуле
летательного аппарата между продольной осью летательного аппарата и горизонтальной плоскостью по формуле
где  - фаза спектральной составляющей на частоте
- фаза спектральной составляющей на частоте  (в радианах),
(в радианах),
 - положительный угол тангажа, когда продольная ось летательного аппарата находится выше горизонтальной плоскости,
- положительный угол тангажа, когда продольная ось летательного аппарата находится выше горизонтальной плоскости,
 - отрицательный угол тангажа, когда продольная ось летательного аппарата находится ниже горизонтальной плоскости.
- отрицательный угол тангажа, когда продольная ось летательного аппарата находится ниже горизонтальной плоскости.
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2521137C1 |
| ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННЫЙ СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537384C1 |
| ГУЛЬКО В.Л., МЕЩЕРЯКОВ А.А., БЛИНКОВСКИЙ Н.К | |||
| Радиолокационный метод определения угла крена летательного аппарата // Приборы и техника эксперимента, 2022, N 3, сс | |||
| Ударно-вращательная врубовая машина | 1922 |
|
SU126A1 |
| Способ определения угла сноса летательного аппарата бортовой радиолокационной станцией | 2017 |
|
RU2660159C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| US 2023251351 A1, 10.08.2023 | |||
| US 2022091254 A1, 24.03.2022 | |||
| CN | |||

