Предлагаемый способ относится к области сигнализационных систем и технических средств охраны и может быть применен для охраны участков местности и подступов к объектам, в разведывательно-сигнализационных системах и в устройствах управления подрывом инженерных боеприпасов.
Известен способ обнаружения перемещающихся объектов на охраняемом рубеже [1], заключающийся в регистрации сейсмического сигнала в нескольких заданных полосах частот, определении спектров зарегистрированных сейсмических сигналов, анализе высокочастотных и низкочастотных составляющих спектра сейсмического сигнала, по соотношению между которыми судят о приближении или удалении перемещающегося объекта.
Недостатком является низкая помехозащищенность, так как обнаружение происходит при простом превышении уровнем сигнала заданного порового значения.
Из известных наиболее близким по технической сущности является способ обнаружения перемещающихся объектов по сейсмическому сигналу [2], согласно которому регистрируется сейсмический сигнал объекта, формируется средневзвешенная частота спектра в низкочастотной полосе спектра, соответствующей эффективной полосе частот полезного сигнала, и высокочастотная составляющая сигнала, отношение указанных характеристик (информативный признак) сравнивается с пороговым значением.
Информативная часть спектра сигналов движущихся человека и техники (эффективная полоса частот полезного сигнала) лежит в диапазоне 5…25 Гц, т.е. является относительно низкочастотной, а спектра ряда помех (дождь, гром и т.п.) - относительно высокочастотной и лежит в диапазоне 100…150 Гц.
По низкочастотной полосе спектра сигнала, получаемого на выходе полосового фильтра с полосой пропускания 5…25 Гц, формируется средневзвешенная частота спектра.
Высокочастотная составляющая сигнала вычисляется по исходному сигналу как отношение числа положительных и отрицательных экстремумов входного сейсмического сигнала за фиксированный интервал времени к длительности этого интервала.
Принятие решения об обнаружении объекта производится по результатам сравнения информативного признака с пороговым значением. Значение порога определяется заранее по сейсмическому сигналу сейсмического фона, зарегистрированного в неблагоприятных условиях (дождь, сильный ветер, гроза и т.д.) для повышения помехоустойчивости устройства. По характеру изменения анализируемого информативного признака определяется приближение (при увеличении отношения) или удаление (при уменьшении отношения) объекта от сейсмического приемника.
Недостатком данного способа является невысокая дальность обнаружения, вызванная постоянством и относительно высоким уровнем порога, определяемого для повышения помехоустойчивости по сейсмическому сигналу сейсмического фона в неблагоприятных условиях.
Предлагается использовать адаптивный (следящий) порог, значение которого зависит от конкретных условий эксплуатации системы. Следящий порог складывается из двух слагаемых - адаптивной и постоянной составляющих.
Значение порога предлагается формировать по следующему правилу:
1) АСПn=АСПn-1+ΔАСП, если ИПn>ИПn-1
или
АСПn=АСПn-1, если ИПn≤ИПn-1;
2) АСПn=ИПn, если ИПn<АСПn,
3) СПn=АСПn+ПСП,
где АСПn, АСПn-1 - значения адаптивной составляющей следящего порога в n-ом и (n-1)-ом временном окне анализа соответственно,
ΔАСП - приращение адаптивной составляющей порога следящего порога,
ИПn, ИПn-1 - значения информативного признака в n-ом и (n-1)-ом временном окне анализа соответственно,
СПn - значение следящего порога в n-ом временном окне анализа,
ПСП - постоянная составляющая следящего порога.
Введение следящего порога эквивалентно использованию другого информативного признака - скорости изменения отношения средневзвешенной частоты спектра в эффективной полосе частот полезного сигнала и высокочастотной составляющей сигнала. Для полезных сигналов из-за изменения амплитуды и частотного состава сигнала при приближении или удалении объекта скорость изменения информативного признака заметно выше, чем для сигнала сейсмического фона. Постоянная составляющая следящего порога вводится для обеспечения высокой помехоустойчивости и выбирается из диапазона 0,03…0,1 В. Меньшие значения берутся при обнаружении человека-группы людей, большие - при обнаружении техники.
Использование следящего порога позволяет повысить дальность и вероятность правильного обнаружения движущихся наземных объектов при сохранении высокой помехоустойчивости устройства.
Предлагаемый способ обнаружения движущихся наземных объектов по сейсмическому сигналу иллюстрируется чертежами.
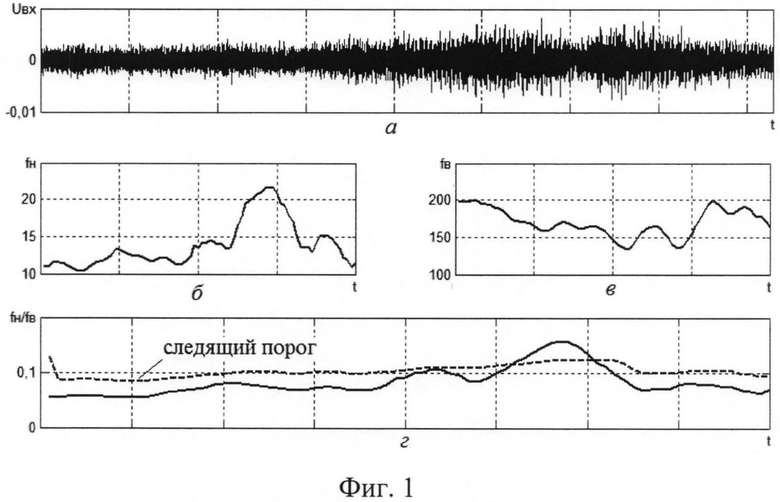
На фиг. 1, а изображен сейсмический сигнал идущего человека, движущегося в течение нескольких десятков секунд с траверзом 50 м относительно сейсмического приемника.
На фиг. 1, б и в приведены средневзвешенная частота спектра в эффективной полосе пропускания (5…25 Гц) и высокочастотная составляющая сигнала соответственно.
На фиг. 1, г показаны отношение средневзвешенной частоты сигнала в полосе частот 5…25 Гц и высокочастотной составляющей сигнала и следящий порог.
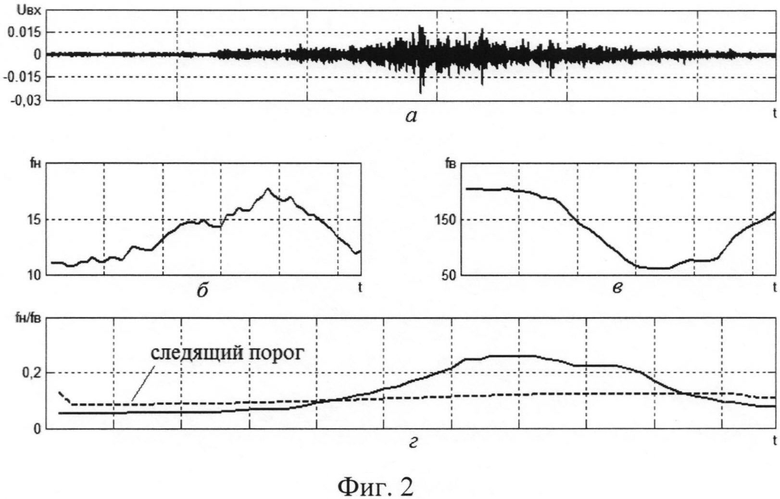
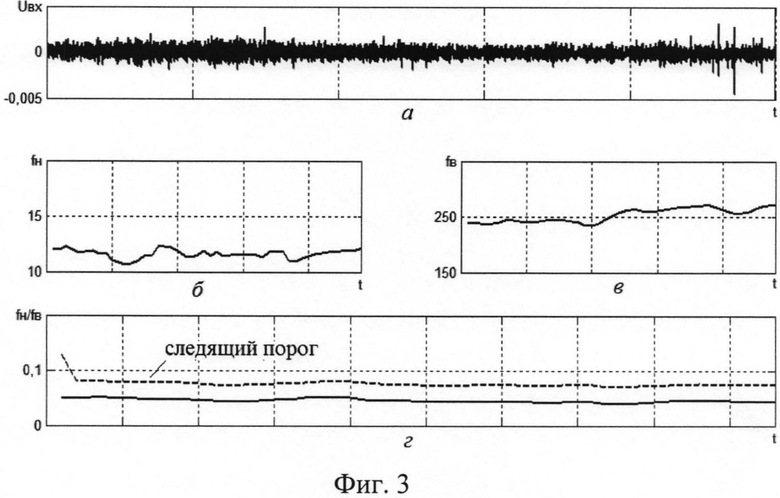
На фиг. 2 и фиг. 3 показаны аналогичные графики для сейсмических сигналов движущегося с траверзом 100 м относительно сейсмического приемника транспортного средства и сейсмического фона соответственно.
На фиг. 4 показана схема реализации устройства по предлагаемому способу.
Устройство, реализующее способ обнаружения движущихся наземных объектов по сейсмическому сигналу, содержит (фиг. 4): 1 - сейсмический приемник, 2 - предварительный усилитель, 3 - полосовой фильтр, 4 - формирователь временного окна, 5 - формирователь спектра, 6 - формирователь числа экстремумов, 7 - формирователь средневзвешенной частоты спектра, 8 - формирователь высокочастотной составляющей сигнала, 9 - делитель, 10 - формирователь начального значения следящего порога, 11 - формирователь следящего порога, 12 - решающее устройство.
При этом выход сейсмического приемника 1 соединен с входом предварительного усилителя 2, выход которого подключен к входу полосового фильтра 3 и к первому входу формирователя числа экстремумов 6, выход полосового фильтра 3 соединен с первым входом формирователя спектра 5, второй вход которого подключен к выходу формирователя временного окна 4, выход которого также подключен ко второму входу формирователя числа экстремумов 6 и второму входу формирователя высокочастотной составляющей сигнала 8, первый вход которого подключен к выходу формирователя числа экстремумов 6, выход формирователя спектра 5 соединен с входом формирователя средневзвешенной частоты спектра 7, выход которого подключен к первому входу делителя 9, второй вход которого соединен с выходом формирователя высокочастотной составляющей сигнала 8, а выход - со вторым входом формирователя следящего порога 11, первый вход которого соединен с выходом формирователя начального значения следящего порога 10, выход формирователя следящего порога 11 соединен с первым входом решающего устройства 12, второй вход которого соединен с выходом делителя 9.
Способ осуществляется следующим образом. Для нахождения средневзвешенной частоты спектра в низкочастотной области спектра сейсмический сигнал после предварительного усиления пропускается через фильтр 3 с полосой пропускания 5…25 Гц. Далее за время скользящего прямоугольного окна в формирователе спектра 5 выполняется преобразование Фурье и находится значение модуля амплитуды каждой гармоники. Параметры временного скользящего окна задаются в формирователе временного окна 4. Длина окна равна 3 с, а его смещение - 1 с. В формирователе средневзвешенной частоты спектра 7 осуществляется вычисление средневзвешенной частоты в эффективной полосе частот полезного сигнала. Для определения высокочастотной составляющей первоначально в формирователе числа экстремумов 6 подсчитывается количество экстремумов в положительной и отрицательной области во входном сейсмическом сигнале после его предварительного усиления за скользящее временное окно. Далее в формирователе высокочастотной составляющей сигнала 8 количество экстремумов делится на длину окна. В делителе 9 находится отношение средневзвешенной частоты спектра в низкочастотной полосе пропускания и высокочастотной составляющей сигнала. В формирователе следящего порога 11 определяется значение следящего порога с учетом значений отношения средневзвешенной частоты спектра в низкочастотной полосе пропускания и высокочастотной составляющей сигнала за время анализируемого и предыдущего временного окна. Начальное значение следящего порога задается формирователем начального значения следящего порога 10. Вычисленное значение следящего порога сравнивается с отношением средневзвешенной частоты спектра в низкочастотной полосе пропускания и высокочастотной составляющей сигнала, при превышении порога принимается решение об обнаружении объекта. Дополнительно по характеру изменения отношения указанных характеристик определяется приближение (при увеличении отношения) или удаление (при уменьшении отношения) объекта.
Предлагаемый способ обнаружения движущихся наземных объектов по сейсмическому сигналу позволяет увеличить дальность и вероятность правильного обнаружения сейсмических средств обнаружения при сохранении их высокой помехоустойчивости.
Источники информации
1. Патент RU 2165629, G01V 1/00. Крюков И.Н., Иванов В.А., Дюгованец А.П., Шуалов А.Г. Способ обнаружения перемещающихся объектов на охраняемом рубеже.
2. Патент RU 2365945, G01V 1/00. Дудкин В.А., Мясникова Н.В., Митрохин М.А., Фирсов М.С., Вольсков А.А. Способ обнаружения перемещающихся объектов по сейсмическому сигналу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2008 |
|
RU2365945C1 |
| Способ обнаружения подвижных объектов наземной техники | 2023 |
|
RU2816287C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2774733C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ С НОРМИРУЕМОЙ ВЕРОЯТНОСТЬЮ ЛОЖНЫХ СРАБАТЫВАНИЙ | 2014 |
|
RU2570230C1 |
| Способ классификации подвижных объектов наземной техники | 2023 |
|
RU2811811C1 |
| УСТРОЙСТВО ОБРАБОТКИ СЕЙСМИЧЕСКИХ СИГНАЛОВ ДЛЯ СИСТЕМ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2003 |
|
RU2242799C1 |
| Способ регистрации и анализа сигналов акустической эмиссии в системе диагностического мониторинга производственных объектов | 2019 |
|
RU2709414C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2455664C1 |
Изобретение относится к области охранных систем и может быть использовано для охраны объектов различного назначения. Заявлен способ обнаружения движущихся наземных объектов по сейсмическому сигналу, согласно которому каждую секунду во входном сейсмическом сигнале после предварительного усиления за время скользящего временного окна находятся средневзвешенная частота спектра в низкочастотной полосе пропускания, соответствующей эффективной полосе частот полезного сигнала, и высокочастотная составляющая, формируемая путем подсчета числа положительных и отрицательных экстремумов входного сейсмического сигнала за определенный промежуток времени. Вычисляется следящий порог, определяемый как сумма адаптивной и постоянной составляющих. Адаптивная составляющая определяется в два этапа. При превышении отношения средневзвешенной частоты спектра в низкочастотной полосе пропускания к высокочастотной составляющей сигнала уровня следящего порога принимается решение об обнаружении объекта, а по увеличению и уменьшению отношения указанных характеристик судят о приближении или удалении объекта. Технический результат - повышение точности и информативности получаемых данных. 4 ил.
Способ обнаружения движущихся наземных объектов по сейсмическому сигналу, включающий регистрацию сейсмического сигнала объекта, формирование средневзвешенной частоты спектра в низкочастотной полосе пропускания, соответствующей эффективной полосе частот полезного сигнала, и высокочастотной составляющей сигнала путем деления числа положительных и отрицательных экстремумов входного сейсмического сигнала, сформированного за время скользящего временного окна, на длительность этого окна, вычисление отношения средневзвешенной частоты спектра в низкочастотной полосе пропускания к высокочастотной составляющей сигнала и сравнение отношения указанных характеристик с порогом обнаружения, определение по анализу изменения во времени определенного отношения приближения и удаления обнаруженного объекта, отличающийся использованием следящего порога, определяемого как сумма адаптивной и постоянной составляющих, при этом адаптивная составляющая определяется в два этапа: на первом этапе значение адаптивной составляющей увеличивается на заданное постоянное значение при увеличении отношения средневзвешенной частоты спектра в низкочастотной полосе пропускания к высокочастотной составляющей сигнала или не изменяется в противном случае, на втором этапе адаптивная составляющая принимается равной отношению средневзвешенной частоты спектра в низкочастотной полосе пропускания к высокочастотной составляющей сигнала при условии, что значение данного отношения больше адаптивной составляющей, вычисленной на первом этапе, или не изменяется в противном случае.
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2008 |
|
RU2365945C1 |

