Изобретение относится к области сейсмической разведки и может быть использовано в охранных и разведывательно-сигнализационных комплексах и системах для оценки момента обнаружения подвижного наземного объекта, появившегося в зоне чувствительности сейсмического датчика.
Любая обработка сейсмических сигналов в сейсмических датчиках, которые чаще всего устанавливаются в грунт, начинается с обязательных операций, которые заключаются в преобразовании механических колебаний грунта в аналоговые электрические сигналы и в их предварительном усилении. Фильтрация этих сигналов входными аналоговыми фильтрами может быть как одноканальной, так и многоканальной. Затем, как правило, в каждом канале отфильтрованные аналоговые сейсмосигналы оцифровываются и подвергаются цифровой обработке и анализу в частотной и/или временной областях, которая направлена на выполнение рабочих функций датчика. Одной из основных таких функций является обнаружение подвижных наземных объектов, появившихся в зоне чувствительности датчика. При этом следует иметь ввиду, что достаточно часто используются способы, в которых обнаружение подвижных наземных объектов осуществляется обработкой аналоговых сейсмосигналов.
Как понятно из сказанного выше, существует большое количество способов обнаружения подвижных наземных объектов. Их многообразие определяется несколькими факторами. В частности, различием параметров, характеризующих сейсмические отклики подвижных наземных объектов, принадлежащих разным классам, при воздействии их на грунт. В такого рода способах для обнаружения подвижного наземного объекта в ряде случаев используют статистические данные, характерные для подвижных наземных объектов того или иного класса. Например, в [1] описан способ, который подразумевает необходимость хранения значений, содержащих некоторые статистические данные, характерные для подвижных биообъектов. В этом случае увеличение числа классов таких объектов распознавания приводит к необходимости увеличения количества признаков, характерных для выбранных классов. А это, в свою очередь, делает алгоритм вычисления более громоздким и затратным. К тому же такие признаки необходимо оценивать, исходя из достаточной статистики.
Наиболее известны и широко используются также пороговые способы обнаружения. В некоторых используется амплитудный порог обнаружения. Суть подобного способа описана в [2] следующим образом. Сейсмичские колебания грунта, создаваемые воздействием подвижных объектов, преобразуются в электрический сигнал, который подвергается предварительному усилению. Далее оценивается величина отношения уровня сигнала к уровню шума. Если отношение сигнал/шум не превышает трёх, то полагают, что объект в зоне чувствительности датчика отсутствует и энергоэкономный режим поиска сигнала продолжается. Если же отношение сигнал/шум больше трёх, то полагают, что произошло обнаружение объекта и сигнал поступает на дальнейшую обработку: в устройство автоматической регулировки усиления (АРУ), на оцифровку и т.д. Очевидно, что в данном способе статистически обоснованная величина порога обнаружения равна трём. Однако, при удалении источника сейсмических колебаний от сейсмодатчика уровни шумовых выбросов могут превышать уровень полезного сигнала. При этом вероятность ложных обнаружений становится достаточно высокой, что в некоторых практических приложениях является неприемлемым.
В [3] в качестве характерного параметра используют девиацию частоты, которая определяется представлением результирующего колебания как имеющего амплитудную и угловую (частотную) модуляцию, что вытекает из предложения осуществлять обнаружение в полосе пропускания, согласованной со спектром сигнала в целом (15-50) Гц

где  - индекс амплитудной модуляции;
- индекс амплитудной модуляции;  - частота модуляции.
- частота модуляции.
При этом для угловой модуляции имеет место равенство  . Здесь ωд - девиация (амплитуда отклонения) частоты. Частоты колебаний ω1 и ω2 на заданном интервале усреднения определяют посредством подсчёта числа пересечений колебанием нулевого уровня в низкочастотной (15-25) Гц и высокочастотной (35-50) Гц частях спектра. Изменение частоты модуляции в среднем на заданном интервале усреднения сразу влечет за собой изменение у колебания числа пересечений нулевого уровня, которое характеризует либо полезный сигнал (обнаружение объекта), либо помеху, так как увеличение числа нулей эквивалентно увеличению частоты в среднем на заданном интервале усреднения. Выбором порога между частотами ω2 и ω1, который задаётся некоторым заранее заданным числом нулей на интервале усреднения, обеспечивается решение задачи селекции помеховых сигналов и обнаружение полезных, не только для ситуаций, когда их спектры отличаются значением М своих спектральных составляющих, но и в тех случаях, когда при одинаковом значении индекса М различие в спектрах определяется положением спектральных составляющих на частотной оси. Однако, число пересечений нулевого уровня сейсмическим колебанием подвержено влиянию внешних помеховых или погодно-климатических условий, что может приводить к изменению состава частотных составляющих в каждой из полос спектра даже в отсутствии объекта. А это отрицательно повлияет на величину выставляемого порога, что может дать прирост числа ложных обнаружений, либо привести к пропуску полезного сигнала (к необнаружению объекта, движущегося в зоне чувствительности датчика).
. Здесь ωд - девиация (амплитуда отклонения) частоты. Частоты колебаний ω1 и ω2 на заданном интервале усреднения определяют посредством подсчёта числа пересечений колебанием нулевого уровня в низкочастотной (15-25) Гц и высокочастотной (35-50) Гц частях спектра. Изменение частоты модуляции в среднем на заданном интервале усреднения сразу влечет за собой изменение у колебания числа пересечений нулевого уровня, которое характеризует либо полезный сигнал (обнаружение объекта), либо помеху, так как увеличение числа нулей эквивалентно увеличению частоты в среднем на заданном интервале усреднения. Выбором порога между частотами ω2 и ω1, который задаётся некоторым заранее заданным числом нулей на интервале усреднения, обеспечивается решение задачи селекции помеховых сигналов и обнаружение полезных, не только для ситуаций, когда их спектры отличаются значением М своих спектральных составляющих, но и в тех случаях, когда при одинаковом значении индекса М различие в спектрах определяется положением спектральных составляющих на частотной оси. Однако, число пересечений нулевого уровня сейсмическим колебанием подвержено влиянию внешних помеховых или погодно-климатических условий, что может приводить к изменению состава частотных составляющих в каждой из полос спектра даже в отсутствии объекта. А это отрицательно повлияет на величину выставляемого порога, что может дать прирост числа ложных обнаружений, либо привести к пропуску полезного сигнала (к необнаружению объекта, движущегося в зоне чувствительности датчика).
Наиболее близким аналогом по технической сущности к предлагаемому является пороговый способ, описанный в [4], принятый за прототип.
В способе-прототипе предлагается вести обработку сейсмосигналов с использованием отношения величины средневзвешенной частоты низкочастотной полосы (5-25) Гц к величине высокочастотной составляющей, формируемой специальным образом в области частот (100-150) Гц.
Сущность способа-прототипа заключается в следующем:
- сейсмический сигнал, поступивший с выхода сейсмодатчика, предварительно фильтруется в низкочастотной полосе Δƒн = (5…25)Гц и усиливается;
- за время скользящего прямоугольного окна выполняется преобразование Фурье и находится значение модуля каждой гармоники;
- находится средневзвешенная частота ƒн спектра в полосе Δƒн;
- высокочастотная составляющая сейсмосигнала ƒв находится так: за время скользящего окна подсчитывается количество экстремумов во входном сейсмическом сигнале и это количество делится на длительность окна;
- находится отношение средневзвешенной частоты спектра в низкочастотной полосе к высокочастотной составляющей сейсмосигнала

и сравнивается с величиной заданного порога Uпор;
- превышение порога (q > Uпор) означает обнаружение объекта в зоне чувствительности сейсмодатчика, а по характеру изменения отношения определяется приближение (при увеличении отношения  ) или удаление (уменьшение отношения
) или удаление (уменьшение отношения  ) объекта;
) объекта;
- значение порога Uпор определяется заранее по сейсмофону, записанному в неблагоприятных условиях (дождь, сильный ветер, гроза и т.п.) для повышения помехоустойчивости реализуемого устройства.
На фиг. 1 и 2 из [4] приведены средневзвешенная частота спектра в низкочастотной полосе (фиг. 1б, 2б) и высокочастотная составляющая сейсмосигнала (фиг. 1в, 2в) для сейсмических сигналов, возбуждаемых одним человеком (траверзное расстояние 20 м) и одним транспортным средством (траверзное расстояние 100 м), которые представлены на фиг. 1а, 2а. Анализ этих иллюстраций показывает, что для подвижных наземных объектов наблюдается характерная динамика поведения отношения (1). В то время, как для сейсмосигнала от дождя (см. фиг. 3а) аналогичной динами изменения отношения (1) на происходит (см. фиг. 3б, 3в). Для транспортного средства для отношения (1) получился достаточно высокий «всплеск», значительно превысивший уровень порога обнаружения (Uпор) также показанный на этой иллюстрации.
Учитывая, что механизм выделения высокочастотной составляющей сейсмосигнала здесь схож с механизмом выделения числа пересечений нуля колебанием, описанным в [3], основным недостатком способа-прототипа является зависимость числа положительных и отрицательных экстремумов от изменения уровня внешних помеховых или погодно-климатических условий, что будет приводить к изменению значения высокочастотной составляющей сейсмосигнала в отсутствии объекта. Это повлияет на увеличение вероятности ложных обнаружений объекта наземной техники при его отсутствии в зоне чувствительности сейсмодатчика, либо приведёт к увеличению вероятности пропуска полезного сейсмосигнала в случае присутствия объекта наземной техники в зоне чувствительности сейсмодатчика.
Задача - снижение вероятности ложного обнаружения подвижных наземных объектов в случае их отсутствия в зоне чувствительности сейсмодатчика и повышение вероятности обнаружения полезного сейсмосигнала в случае присутствия объектов наземной техники в зоне чувствительности сейсмодатчика.
Для решения поставленной задачи в способе обнаружения подвижных объектов наземной техники по сейсмическому сигналу, включающем регистрацию, предварительную фильтрацию и усиление сейсмического сигнала, возбуждаемого подвижным объектом наземной техники, согласно изобретению сейсмический сигнал дискретизируют с заданной частотой и в текущих секундных временных окнах подвергают быстрому дискретному преобразованию Фурье и дополнительно фильтруют цифровыми фильтрами в низкочастотной и высокочастотной полосах; временные отсчёты восстанавливают с использованием обратного дискретного преобразования Фурье, усредняют, сглаживают на длительности текущих временных окон и используют в качестве отсчётов управляющего напряжения коэффициентом усиления автоматической регулировки усиления, текущие уровни которого сравнивают со статистически обоснованной величиной порога обнаружения; пересечение уровнем текущих отсчётов коэффициента усиления автоматической регулировки усиления порога обнаружения сверху вниз с учётом инертности автоматической регулировки усиления является признаком обнаружения подвижного объекта наземной техники.
В предлагаемом способе используем основное свойство АРУ усиливать слабые сигналы и подавлять (ослаблять) сильные в пределах заданного динамического диапазона [5].
Предлагаемый способ характеризуется последовательностью следующих операций:
- с выхода сейсмодатчика сейсмическое колебание, представляющее собой канальный шум, предварительно фильтруется аналоговым фильтром в полосе (10…40) Гц, усиливается и дискретизируется с частотой ƒd = 1000 Гц;
- дискретизированное колебание разбивается на группы по N = 1000 отсчётов (секундный интервал при данной частоте дискретизации - прямоугольное скользящее окно)  и
и  , где n = 0, 1, … , N-1 и k = 0, 1, … и осуществляется их быстрое дискретное преобразование Фурье с последующей цифровой фильтрацией фильтром типа Баттерворта-Чебышева в полосах: низкочастотной Δƒн = (10-19) Гц и высокочастотной Δƒв = (20-32) Гц;
, где n = 0, 1, … , N-1 и k = 0, 1, … и осуществляется их быстрое дискретное преобразование Фурье с последующей цифровой фильтрацией фильтром типа Баттерворта-Чебышева в полосах: низкочастотной Δƒн = (10-19) Гц и высокочастотной Δƒв = (20-32) Гц;
- применяется обратное преобразование Фурье и отфильтрованные шумы восстанавливаются во временной области

- с учётом влияния предварительного коэффициента усиления К0 усредняются модули амплитуд отфильтрованных временных отсчётов (2) по количеству и месту тех отсчётов, которые соответствуют частотным отсчётам в полосах Δƒн и Δƒв при прямом преобразовании Фурье

- суммируются, усредняются и сглаживаются комплементарным фильтром c соответствующими коэффициентами усиления текущие значения модулей амплитуд из (3)

и текущие отсчёты (4) используются в качестве управляющего напряжения для коэффициента усиления АРУ

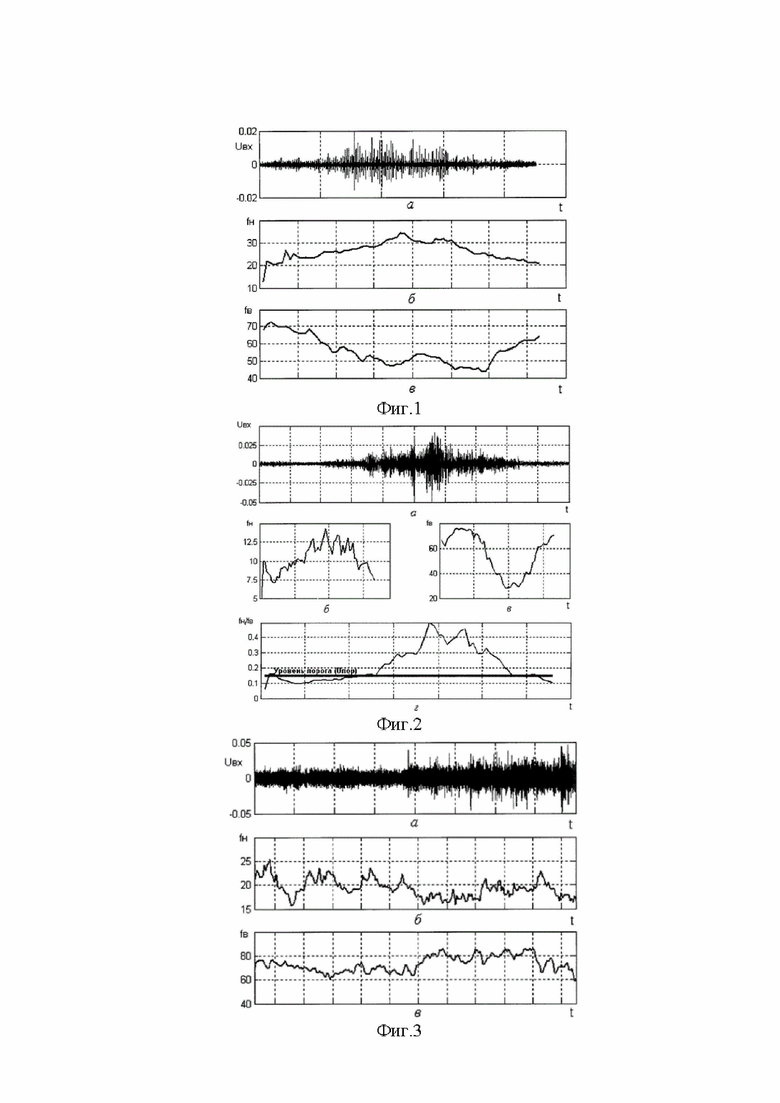
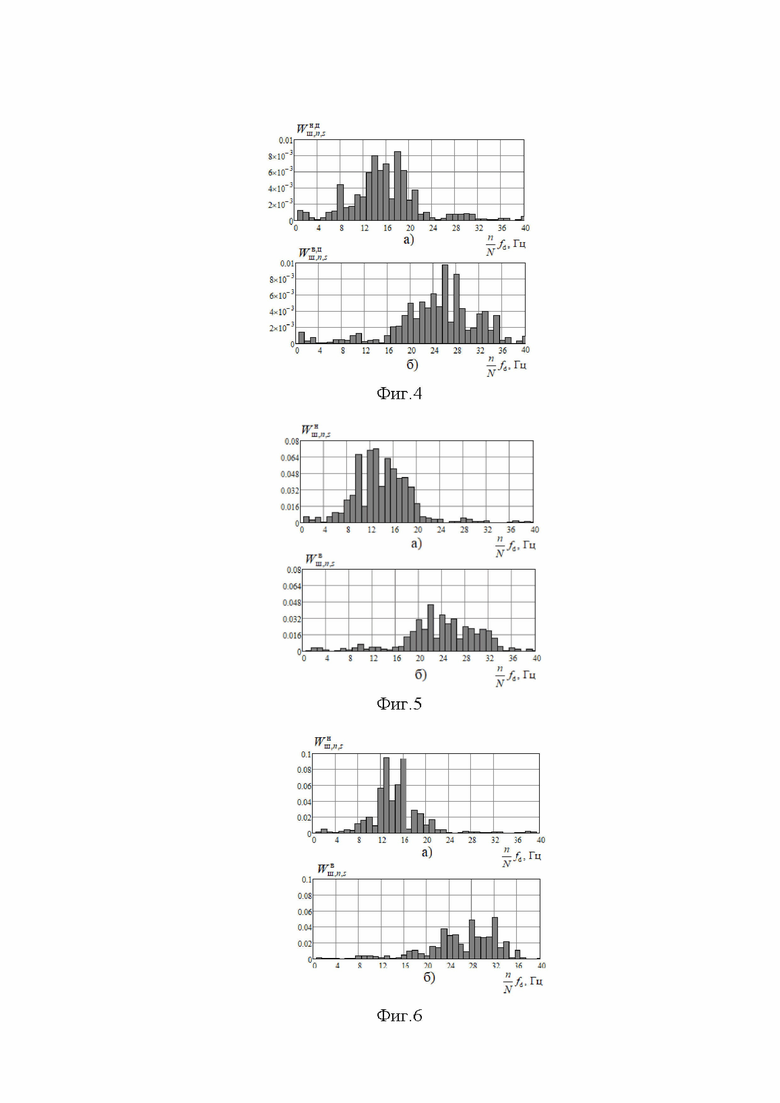
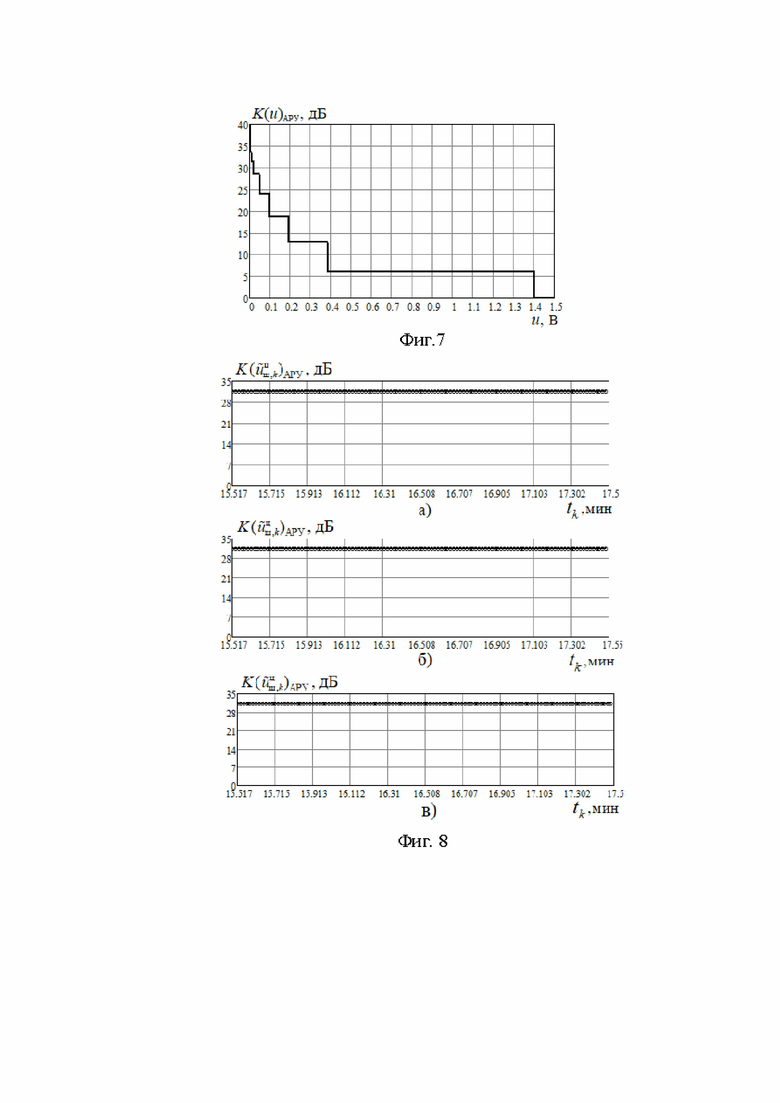
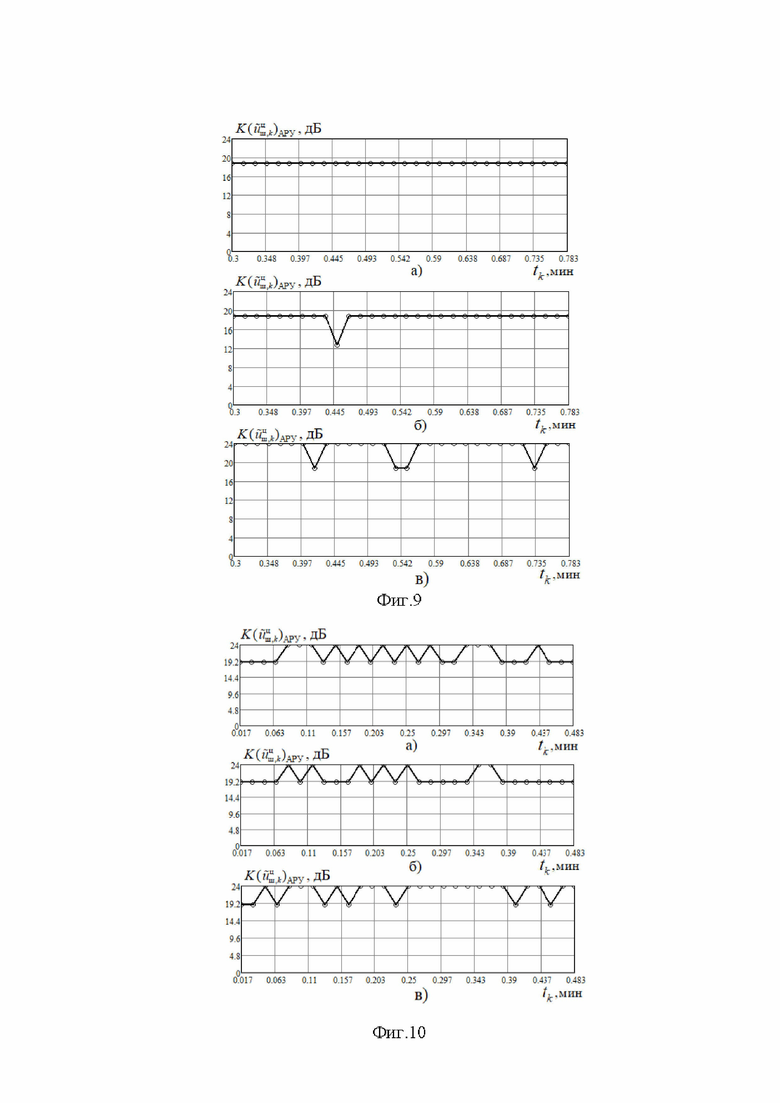
На фиг. 4÷6 представлены модули спектральных характеристик канальных шумов, записанных непосредственно перед прогоном подвижных объектов наземной техники (ОНТ) различных типов по соответствующим трассам и отфильтрованных в соответствующих полосах. Запись шумов на фиг. 4 соответствует трём гусеничным ОНТ, так как они прогонялись по стандартизованной контрольно-испытательной трассе (КИТ) с небольшим временным промежутком. Один ОНТ относился к классу тяжёлой гусеничной техник (ТГТ), два остальных - к классу лёгкой гусеничной техники (ЛГТ). Две другие записи шумов на фиг. 5 и фиг. 6 относятся к грузовому автомобилю (класс тяжёлой колёсной техники - ТКТ) и легковому автомобилю (класс лёгкой колёсной техники - ЛКТ) соответственно, так как временной разрыв между их проездами по загородной грунтовой дороге был достаточно велик. Анализ этих рисунков показывает, что для канальных шумов, относящихся к колёсной технике в низкочастотной полосе уровень частотных составляющих больше, чем в высокочастотной полосе, что является признаком либо присутствия сейсмопомех в рабочем диапазоне частот, либо изменения параметров почвы в связи с влиянием погодных или климатических факторов. На фиг. 7 представлена дискретно-непрерывная характеристика  . Фиг. 8а…10а иллюстрируют текущие значения секундных временных отсчётов коэффициента усиления АРУ (5), а на нижних графиках 8б), 8в)…10б), 10в) для сравнения представлены коэффициенты усиления АРУ в частотных каналах при воздействии только сейсмических шумов и помех (2) сглаженных комплементарным фильтром. Из анализа фиг. 8…10 следует, что при воздействии только сейсмошумов уровень временных отсчётов усреднённого коэффициента усиления АРУ достаточно стабильно имеет максимальное значение около 32.0 дБ. Tо есть можно сказать, что
. Фиг. 8а…10а иллюстрируют текущие значения секундных временных отсчётов коэффициента усиления АРУ (5), а на нижних графиках 8б), 8в)…10б), 10в) для сравнения представлены коэффициенты усиления АРУ в частотных каналах при воздействии только сейсмических шумов и помех (2) сглаженных комплементарным фильтром. Из анализа фиг. 8…10 следует, что при воздействии только сейсмошумов уровень временных отсчётов усреднённого коэффициента усиления АРУ достаточно стабильно имеет максимальное значение около 32.0 дБ. Tо есть можно сказать, что  . Если же во время записи сейсмофона по независимым причинам воздействовали сейсмопомехи, часть из которых попадала в рабочий диапазон частот, то возрастание интенсивности сейсмофона всегда ведёт к снижению уровня коэффициента усиления АРУ, что показано на фиг. 9, фиг. 10 и служит подтверждением результатов анализа фиг. 5 и фиг. 6.
. Если же во время записи сейсмофона по независимым причинам воздействовали сейсмопомехи, часть из которых попадала в рабочий диапазон частот, то возрастание интенсивности сейсмофона всегда ведёт к снижению уровня коэффициента усиления АРУ, что показано на фиг. 9, фиг. 10 и служит подтверждением результатов анализа фиг. 5 и фиг. 6.
Операции, осуществляемые при появлении подвижных наземных объектов в зоне чувствительности сейсмодатчика:
- повторяется большая часть операций, описанных выше для случая канальных шумов,
- вычисляются текущие отсчёты суммарной усреднённой амплитуды сейсмосигналов, сглаженные комплементарным фильтром

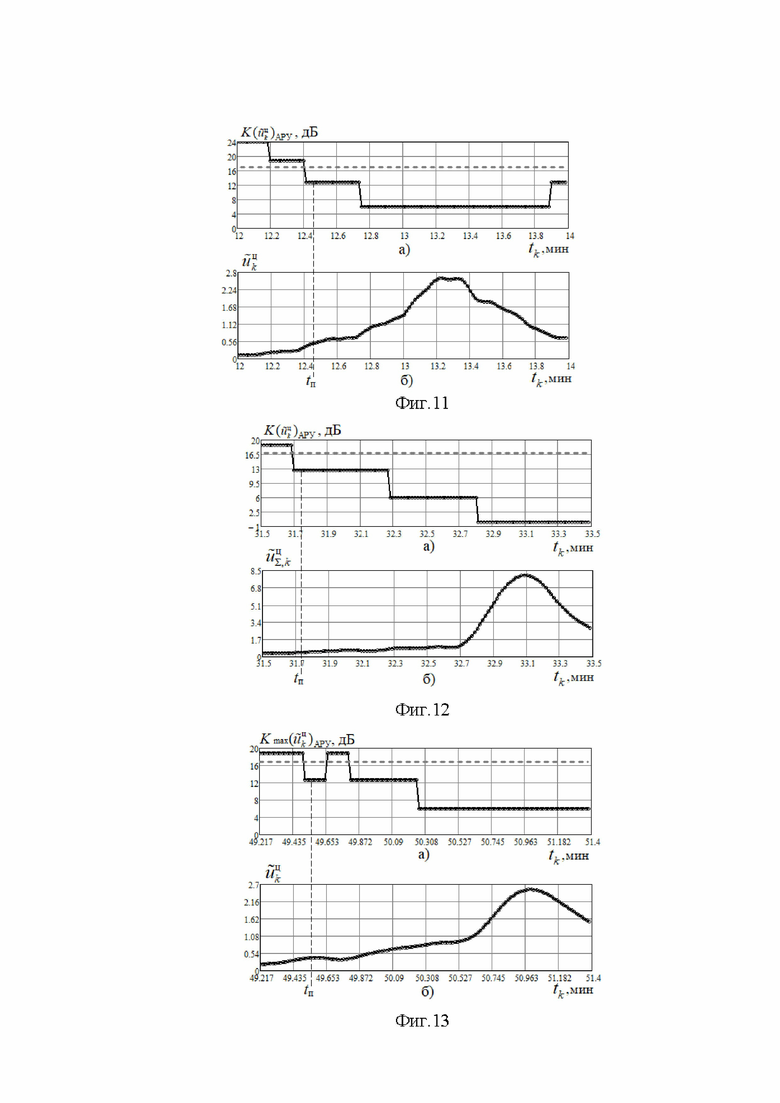
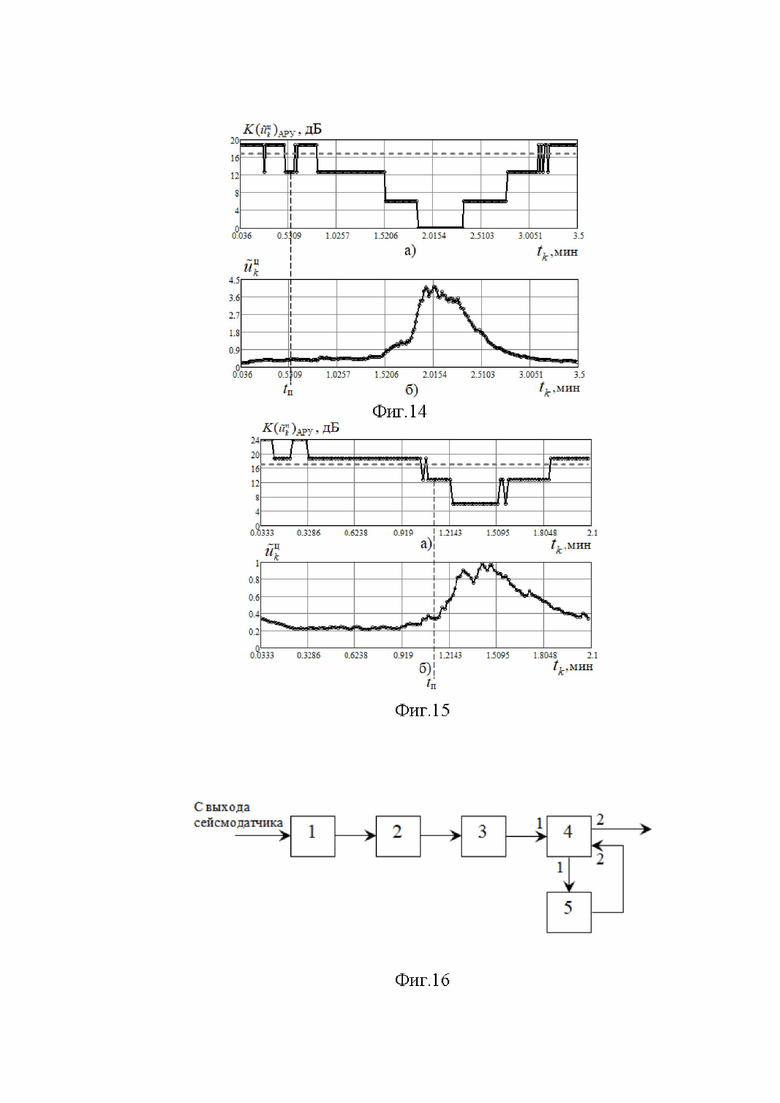
Фиг. 11…15 иллюстрируют вид дискретно-непрерывных коэффициентов усиления АРУ (9) и текущих отсчётов суммарной усреднённой амплитуды сейсмосигналов (10), сглаженных комплементарным фильтром, с помощью которой можно наглядно представить положение момента обнаружения ОНТ с учётом инертности АРУ и примерное положение точки траверза на временной оси. Момент пересечения порога обнаружения коэффициентом 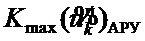 сверху вниз с учётом инертности АРУ и будет являться моментом обнаружения ОНТ. Для этого находится признак пересечения этого порога сверху вниз
сверху вниз с учётом инертности АРУ и будет являться моментом обнаружения ОНТ. Для этого находится признак пересечения этого порога сверху вниз

и выделяется только момент, удовлетворяющий признаку

Рациональный уровень порога обнаружения ПАРУ ≈ 16.9 дБ на фигурах 11…15 обозначен жирной штриховой линией серого цвета. Оценка его величины произведена с использованием статистической обработки проездов по обычным шоссе и прогонов по КИТ определённого количества ОНТ различных классов. При этом учитывался компромисс между величиной момента обнаружения ОНТ и длительностью отрезка времени, равного разности между моментом прохождения объектами точки траверза и моментом окончания цикла общего алгоритма. Символом tп обозначен момент обнаружения ОНТ с учётом инертности АРУ.
Таким образом, запас по устойчивости к колебаниям коэффициента усиления АРУ в случае воздействия шумов и помех или других факторов составляет  Это подтверждает иллюстрация на фиг. 9б), когда при достаточно ощутимом влиянии внешней помехи только один шумовой выброс пересёк порог ПАРУ сверху вниз. Но даже при этом ложного обнаружения ОНТ произойти не могло бы вследствие инертности АРУ.
Это подтверждает иллюстрация на фиг. 9б), когда при достаточно ощутимом влиянии внешней помехи только один шумовой выброс пересёк порог ПАРУ сверху вниз. Но даже при этом ложного обнаружения ОНТ произойти не могло бы вследствие инертности АРУ.
Таким образом, достигаемый технический результат заключается в повышении устойчивости функциональных характеристик устройства, реализующего регистрацию и обработку поступающих на его вход сейсмических колебаний, к изменению уровня внешних шумовых, помеховых или погодно-климатических условий, что выражается в снижении вероятности ложных обнаружений подвижных объектов наземной техники в случае их отсутствия в зоне чувствительности сейсмодатчика, а в случае их присутствия - в повышении вероятности правильного обнаружения полезного сейсмосигнала генерируемого этими объектами.
На фиг. 16 представлена укрупнённая блок-схема устройства, реализующего предлагаемый способ, где введены следующие обозначения
1 - аналоговый полосовой фильтр (ПФ);
2 - предварительный усилитель (УС);
3 - аналого-цифровой преобразователь (АЦП);
4 - микроконтроллер (МК);
5 - устройство автоматической регулировки усиления (АРУ).
Устройство содержит последовательно соединённые полосовой фильтр 1, предварительный усилитель 2, аналого-цифровой преобразователь 3, микроконтроллер 4 и устройство автоматической регулировки усиления 5 выход которого соединён со вторым входом микроконтроллера 4, второй выход которого является выходом устройства.
Работает устройство следующим образом.
С выхода сейсмоприёмника на вход ПФ 1 поступает либо канальный шум, либо его смесь с сейсмосигналом, возбуждаемым подвижным наземным объектом в почве. С выхода ПФ 1 отфильтрованный в полосе (10…40) Гц сейсмосигнал усиливается в УС 2 и поступает на вход АЦП 3, где подвергается дискретизации с частотой ƒd = 1000 Гц. С выхода АЦП 3 временные отсчёты подаются на первый вход микроконтроллера 4, в котором осуществляются операции (2)…(8), и на вход АРУ 5 поступают отсчёты управляющего напряжения (4) или (8). С выхода АРУ 5 на второй вход МК 4 подаются отсчёты коэффициента усиления АРУ (5) или (9). В микроконтроллере 4 осуществляются операции (11) и (12), то есть, пока уровень текущих отсчётов коэффициента усиления АРУ, поступающих с выхода АРУ 5 на второй вход МК 4, будет больше уровня порога обнаружения ПАРУ, МК 4 со второго выхода будет выдавать решение об отсутствии подвижного наземного объекта в зоне чувствительности сейсмодатчика. Если уровень хотя бы нескольких текущих отсчётов окажется меньше уровня порога обнаружения ПАРУ, то МК 4 со второго выхода выдаст решение о том, что объект обнаружен. Принятое решение в соответствующем формате со второго выхода МК 4 поступает для дальнейшего использования.
Реализация данного устройства не должна вызывать затруднений, так как все блоки являются известными и достаточно часто используемыми инженерных разработках.
Источники информации.
1. Патент 2337405 (РФ). Устройство для обнаружения человека и группы людей по сейсмическим сигналам. МПК G08B 13/16, G01V 1/22. Дудкин В.А., Захаров С.М., Акимова Ю.С. Заявка № 2007120827/28 от 04.06.2007. Опубл. 27.10.2008 г.
2. Патент 2311665 (РФ). Сейсмическое устройство обнаружения и классификации объектов. МПК G01V 1/16. Сизов А.С., Стребков Д.А., Челышов С.Ю. Заявка № 2006112075/28 от 11.04.2006. Опубл. 27.11.2007 г.
3. Патент 2242799 (РФ). Устройство обработки сейсмических сигналов для систем охранной сигнализации. МПК G08B 13/16, G01V 1/22. Глазунов Б.П., Груздов В.А., Окулов С.А., Ольховская И.В., Фролов С.Б. Заявка № 2003113974/09 от 12.05.2003. Опубл. 20.12.2004 г.
4. Патент 2365945 (РФ). Способ обнаружения перемещающихся объектов по сейсмическому сигналу. МПК G01V 1/00. Дудкин В.А., Мясникова Н.В., Митрохин М.А., Фирсов М.С., Вольсков А.А. Заявка № 2008128036/28 от 09.07.2008. Опубл. 27.08.2009 г.
5. Мэндл, М. 200 избранных схем электроники / Пер. с англ. под ред.
д-ра техн. наук Я.С. Ицхоки // М. Мэндл. - М.: Издательство «Мир», 1980. - 344 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ классификации подвижных объектов наземной техники | 2023 |
|
RU2811811C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2774733C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2776588C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
| Способ пеленгования подвижных объектов наземной техники одним трёхкомпонентным сейсмическим датчиком | 2022 |
|
RU2800112C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ С НОРМИРУЕМОЙ ВЕРОЯТНОСТЬЮ ЛОЖНЫХ СРАБАТЫВАНИЙ | 2014 |
|
RU2570230C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2202811C1 |
| Способ классификации вертолётов с одним несущим винтом на режиме горизонтального полёта | 2024 |
|
RU2834238C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СЖАТИЯ СЕЙСМИЧЕСКОГО СИГНАЛА В СКВАЖИНЕ | 2012 |
|
RU2570699C2 |
Изобретение относится к области сейсмической разведки и может быть использовано для обнаружения объектов наземной техники. Сущность: выполняют регистрацию, предварительную фильтрацию и усиление сейсмического сигнала, возбуждаемого подвижным объектом наземной техники. Усиленный сейсмический сигнал дискретизируют с заданной частотой. Дискретизированный сигнал в текущих секундных временных окнах подвергают быстрому дискретному преобразованию Фурье и фильтруют цифровыми фильтрами в низкочастотной и высокочастотной полосах. Временные отсчеты восстанавливают с использованием обратного дискретного преобразования Фурье, усредняют и сглаживают на длительности текущих временных окон. Текущие отсчеты используют в качестве отсчетов управляющего напряжения коэффициентом усиления автоматической регулировки усиления (АРУ). Текущие уровни коэффициента усиления АРУ сравнивают со статистически обоснованной величиной порога обнаружения. Пересечение уровнем текущих отсчетов коэффициента усиления АРУ порога обнаружения сверху вниз, с учетом инертности автоматической регулировки усиления, является признаком обнаружения подвижного объекта наземной техники. Технический результат: повышение точности обнаружения подвижных объектов в зоне чувствительности сейсмодатчика. 16 ил.
Способ обнаружения подвижных объектов наземной техники по сейсмическому сигналу, включающий регистрацию, предварительную фильтрацию и усиление сейсмического сигнала, возбуждаемого подвижным объектом наземной техники, отличающийся тем, что сейсмический сигнал дискретизируют с заданной частотой и в текущих секундных временных окнах подвергают быстрому дискретному преобразованию Фурье и дополнительно фильтруют цифровыми фильтрами в низкочастотной и высокочастотной полосах; временные отсчеты восстанавливают с использованием обратного дискретного преобразования Фурье, усредняют, сглаживают на длительности текущих временных окон и используют в качестве отсчетов управляющего напряжения коэффициентом усиления автоматической регулировки усиления, текущие уровни которого сравнивают со статистически обоснованной величиной порога обнаружения; пересечение уровнем текущих отсчетов коэффициента усиления автоматической регулировки усиления порога обнаружения сверху вниз, с учетом инертности автоматической регулировки усиления, является признаком обнаружения подвижного объекта наземной техники.
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2008 |
|
RU2365945C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
