Область техники
Раскрытое техническое решение относится в целом к области беспилотных летательных аппаратов и, в частности, к системе и способу безопасной вынужденной посадки беспилотного летательного аппарата в случае отказа двигателя.
Уровень техники
Возможности беспилотных летательных аппаратов значительно развились таким образом, что беспилотные летательные аппараты обычно используют для выполнения различных задач и целей не обязательно военного предназначения. В настоящее время беспилотные летательные аппараты могут удаленно управляться или работать автономно на основе предварительно составленных планов полета. Однако главный недостаток беспилотного летательного аппарата состоит в возможности потери контроля над ним в случае серьезной технической неисправности, например при отказе двигателя или в случае потери связи с оператором удаленно управляемого беспилотного летательного аппарата. В таких случаях беспилотный летательный аппарат может, в конечном счете, потерпеть аварию, создавая, тем самым, серьезную угрозу для безопасности, особенно вблизи населенных пунктов, в дополнение к высокой стоимости возникающих повреждений или к полной потере беспилотного летательного аппарата и его бортовых систем. Следовательно, разрешенное для полетов беспилотных летательных аппаратов воздушное пространство чрезвычайно ограниченно и беспилотным летательным аппаратам обычно не разрешено летать через воздушное пространство для гражданских летательных аппаратов. Такие ограничения затрудняют управление беспилотным летательным аппаратом и сужают его потенциальное использование.
Бортовые автономные системы могут облегчать продолжительную управляемую работу беспилотного летательного аппарата и могут содействовать операциям полета и посадки в случае потери связи с оператором беспилотного летательного аппарата или в случае серьезной технической неисправности. Такие системы обычно представляют собой автоматизированные системы, способные, в частности, определять маршруты полета беспилотного летательного аппарата или выбирать возможные посадочные площадки. Однако безопасная посадка беспилотного летательного аппарата (безопасная и для окружающей среды, и для самого беспилотного летательного аппарата) и, более того, безопасная посадка беспилотного летательного аппарата в случае отказа двигателя, представляет собой вызывающую затруднений задачу. В дополнение к соображениям о безопасности и предотвращении повреждений возможность безопасной посадки в такой ситуации может способствовать уменьшению количества ограничений на полеты беспилотных летательных аппаратов.
На фиг. 1 схематически показан вид сверху известного "тромбонного" захода на посадку, в целом обозначенного как 10. Тромбонный заход на посадку представляет собой разновидность кругового или изогнутого захода на посадку или маневра (также известного как маневр «заход на посадку после полета по кругу»), обычно используемую пилотируемыми летательными аппаратами при посадке на взлетно-посадочную полосу аэропорта при невозможности или нежелательности посадки с курса полета. Существует несколько обычных вариантов захода на посадку после полета по кругу, включающих несколько участков маршрута (сегментов полета) и один разворот или большее количество разворотов под различными углами относительно взлетно-посадочной полосы или предыдущего участка маршрута.
Тромбонный заход 10 на посадку, показанный на фиг. 1, обычно содержит участок 30 полета до разворота (downwind leg), участок 40 между разворотами (base leg) и участок 50 после разворота (upwind leg). Пилотируемый летательный аппарат 20 летит вдоль тромбонного захода 10 на посадку для приземления на взлетно-посадочную полосу 70. Участок 30 полета до разворота по существу ориентирован против направления посадки и по существу параллелен взлетно-посадочной полосе 70. Участок 50 после разворота по существу ориентирован по направлению посадки и выровнен относительно центральной линии 60 взлетно-посадочной полосы 70 для облегчения посадки летательного аппарата 20 на взлетно-посадочной полосе 70. Участок 30 полета до разворота и участок 50 после разворота представляют собой по существу прямолинейные и параллельные участки. Участок 40 между разворотами обеспечивает возможность летательному аппарату 20 выполнить разворот на 180° от участка 30 полета до разворота к участку 50 после разворота.
Следует иметь в виду, что такой заход на посадку обычно называют «тромбоном» ввиду его геометрии, напоминающей форму и способ работы с музыкальным инструментом тромбоном. Этот музыкальный инструмент использует телескопическое скольжение, обеспечивающее музыканту возможность изменять длину его трубки для воспроизведения звуков различной высоты. Таким же образом различные варианты захода на посадку могут быть получены посредством изменения длины участка полета до разворота тромбонного захода на посадку. Таким образом, тромбонный заход на посадку весьма предпочтителен для авиадиспетчеров в аэропортах при необходимости соблюдения интервала между летательными аппаратами, поскольку такой заход на посадку обеспечивает гибкость посредством регулирования длины участка полета до разворота.
Заходы на посадку после полета по кривой или по кругу также были использованы в известном уровне техники в качестве вариантов захода на посадку для пилотируемых летательных аппаратов в случае отказа двигателя (известны также как: «заход на посадку с планирующего спуска», «заход на вынужденную посадку» или «заход на посадку с выключенным двигателем и разворотом на 180°»). Эти варианты захода на посадку пилоты обычно используют во время летной практики на легких летательных аппаратах для выполнения посадки с неработающим двигателем.
Заявка №7,689,328 на патент США (Spinelli) под названием «Определение подходящих областей для посадки вне аэропорта» (Determining Suitable Areas for Off-Airport Landing) описывает систему и способ для облегчения безопасной вынужденной посадки пилотируемого летательного аппарата или беспилотного летательного аппарата, управляемого вручную или автоматически. Система содержит средство для анализа и планирования маршрута, использующее алгоритм прокладки курса для обработки информации, например, данных глобальной системы позиционирования (GPS), данных об аппаратуре летательного аппарата и об эксплуатационных параметрах. В режиме составления программы полета средство для анализа и планирования маршрута способно предоставлять информацию о достижимых и безопасных районах посадки и информацию о маршруте к такому району посадки. В режиме полета (в реальном времени) системы летательного аппарата могут предоставлять информацию относительно положения, скорости, направления полета и высоты над уровнем моря летательного аппарата, а также о скорости ветра. Данные о маршруте могут также быть основаны на текущих данных, предоставляемых системами летательного аппарата, и могут включать информацию о предельных значениях для безопасных вариантов и индикаторы вертикальных тенденций. Огибающая предельных значениях для безопасных вариантов предоставляет информацию о предельных значениях планирующего спуска при выключенном двигателе и о доступных посадочных площадках, соответственно. Индикаторы вертикальных тенденций показывают влияние изменения конфигурации на дальность планирующего спуска. Системы летательного аппарата могут содержать систему автоматического обучения с получением характеристик летательного аппарата. При работе система автоматического обучения может использовать алгоритмы расчета характеристик летательного аппарата для выработки рабочих характеристик на основании маневров в полете. Системы продолжают обновлять рабочие характеристики, используя текущие полетные данные.
Заявка №6573841 на патент США (Price) под названием «Воспроизведение дальности планирующего спуска для дисплеев электронных пилотажных приборов» (Glide Range Depiction for Electronic Flight Instrument Displays) описывает способ воспроизведения дальности планирующего спуска для пилотируемого летательного аппарата после отказа двигателя. Дисплей воспроизводит дальность безопасного планирующего спуска. Пилот может выбрать аэропорт в пределах дальности планирующего спуска для выполнения вынужденной посадки. Происходит непрерывное вычисление дальности безопасного планирующего спуска на основании информации о погоде и ветре, воздушной скорости, направлении полета и вычисление теоретической высоты планирующего спуска, причем последняя из этих величин учитывает, по меньшей мере, высоту полета над уровнем моря летательного аппарата и качество планирующего спуска. Может быть рассмотрена дополнительная информация, способная воздействовать на качество планирующего спуска. Такая информация может быть сохранена и извлечена или определена датчиками.
Патент США №7512462 (Nichols и др.) под названием «Автоматическое устройство для выработки действий при непредвиденных обстоятельствах» (Automatic Contingency Generato) описывает автоматическое устройство для выработки действий при непредвиденных обстоятельствах для беспилотных летательных аппаратов, предпочтительно автономных, для автоматического определения возможного маршрута в ответ на непредвиденные обстоятельства, испытываемые беспилотным летательным аппаратом, например, при отказе двигателя. Это автоматическое устройство выработки действий при непредвиденных обстоятельствах непрерывно вырабатывает новые маршруты к альтернативным точкам назначения. При определении таких маршрутов автоматическое устройство выработки действий при непредвиденных обстоятельствах использует энергетическое состояние беспилотного летательного аппарата, включая его относительную высоту полета над уровнем моря. Энергетическое состояние использовано для определения дальности планирующего спуска беспилотного летательного аппарата и для идентификации возможных мест посадки в пределах дальности планирующего спуска. Предсказанные и фактические данные о ветре использованы для динамического приспособления всех маршрутов на воздействие ветра на радиус разворота и на возможности подъема/спуска. Автоматическое устройство выработки действий при непредвиденных обстоятельствах может построить маршрут для захода на посадку или к обозначенной взлетно-посадочной полосе (включая заход на посадку). Маршруты захода на посадку могут быть сохранены как часть данных о полетном задании.
Патент США №7330781 (Artini и др.) под названием «Способ определения траектории захода на посадку и ведения по ней летательного аппарата» (Method to Determine and Guide Aircraft Approach Trajectory) описывает способ ведения пилотируемого летательного аппарата и автоматического определения точки перехода между первой траекторией и второй траекторией, на которой происходит посадка для выгрузки войск, и достижения начального точки второй траектории при заранее определенных условиях полета. Эти траектории представляют собой прямолинейные сегменты. Заранее определенные условия полета включают в себя, по меньшей мере: скорость, высоту полета над уровнем моря, аэродинамическую конфигурацию летательного аппарата и интенсивность замедления.
Патент США №6438469 (Dwyer и др.) под названием «Система управления полетом и способ для маневра захода на посадку летательного аппарата после полета по кругу» (Flight Control System and Method for an Aircraft Circle-to-Land Maneuver) описывает систему управления полетом и способ разработки и управления маневром захода на посадку после полета по кругу пилотируемого летательного аппарата при использовании бортового устройства навигации. Пилот выбирает взлетно-посадочную полосу, предназначенную для посадки. Система определяет соответствующий маневр захода на посадку после полета по кругу в соответствии с полученными входными данными, включая данные о положении, данные о скорости летательного аппарата и об атмосферных условиях. Кроме того, система выполнена с возможностью получения предварительно вводимых или оперативных данных от пилота, например, о радиусе разворота и длине конечного этапа захода на посадку.
Документ Управления гражданской авиации Новой Зеландии «Практика вынужденной посадки», VECTOR - Pointing to Safer Aviation (январь/февраль 2007 г.): с. 3-7, описывает основные технические решения для проведения вынужденной посадки при выключенном двигателе для легкого одномоторного летательного аппарата. Эти технические решения включают операции, предварительно сформированные главным образом вручную или визуально пилотом, включая подтверждение направления и скорости ветра, выбор посадочной площадки и планирование захода на посадку. Такой заход на посадку обычно включает в себя участок полета до разворота, участок между разворотами и конечный участок захода на посадку. При необходимости участок между разворотами может быть изменен для регулировки высоты полета над уровнем земли летательного аппарата (то есть, посредством отворота от посадочной площадки при слишком большой высоте полета летательного аппарата или посредством разворота к посадочной площадке при слишком низкой высоте полета летательного аппарата).
Раскрытие изобретения
В соответствии с одной особенностью настоящего изобретения предложен способ автономной безопасной вынужденной посадки беспилотного воздушного аппарата с двигателем в случае отказа двигателя. Способ включает операцию выработки траектории захода на посадку, которая содержит участок полета до разворота с началом в точке инициирования траектории, участок полета после разворота с завершением в выбранной точке приземления и участок полета с U-образным разворотом, размещенный между участком полета до разворота и участком после разворота. Способ дополнительно включает операции направления беспилотного летательного аппарата в точку инициирования для следования вдоль участка полета до разворота траектории захода на посадку и многократного определения значения качества планирующего спуска беспилотного летательного аппарата на основании текущих условий полета беспилотного летательного аппарата. Способ дополнительно включает операцию многократного определения текущей точки разворота вдоль участка полета до разворота для посадки беспилотного летательного аппарата в выбранной точке приземления, инициирования участка полета с U-образным разворотом в текущей точке разворота, причем определение текущей точки разворота основано на определенном значении качества планирующего спуска. При достижении беспилотным летательным аппаратом текущей точки разворота, способ дополнительно включает операцию направления беспилотного летательного аппарата для следования по участку полета с U-образным разворотом и по участку после разворота траектории захода на посадку с целью посадки беспилотного летательного аппарата в выбранной точке приземления. Операция многократного определения текущей точки разворота может быть каждый раз выполнена относительно ранее определенной точки разворота. Способ может дополнительно включать операцию многократного определения точки приземления, соответствующей текущей точке разворота, на основании определенного значения качества планирующего спуска, причем операция определения текущей точки разворота выполнена с учетом расхождения между точкой приземления, ранее определенной в соответствии с ранее определенной точкой разворота, и выбранной точкой приземления. Способ может дополнительно включать следующие операции: выбор выбираемой точки приземления, причем определенная предполагаемая высота полета беспилотного летательного аппарата над выбранной точкой приземления достаточна для обеспечения беспилотному летательному аппарату возможности выполнения безопасной вынужденной посадки в выбранной точке приземления, и предполагаемая высота полета определена на основании определенного значения качества планирующего спуска; и направление беспилотного летательного аппарата для выполнения планирующего спуска к выбранной точке приземления при отказе двигателя. Выбранная точка приземления может быть выбрана из базы данных, содержащей набор сведений относительно множества точек приземления при вынужденной посадке. Эти сведения могут содержать направление взлетно-посадочной полосы, на которой размещена соответствующая точка приземления, и географическое размещение соответствующей точки приземления. Способ может дополнительно включать следующие операции: определение предполагаемой высоты полета беспилотного летательного аппарата над выбранной точкой приземления, основанное на определенном значении качества планирующего спуска; определение возможности выполнения планирующего спуска вдоль траектории ожидания, основанное на том, превышает ли предполагаемая высота полета беспилотного летательного аппарата минимальную высоту, заранее указанную как обеспечивающую возможность безопасной вынужденной посадки в выбранной точке приземления; и направление беспилотного летательного аппарата для выполнения планирующего спуска вдоль траектории ожидания, если она возможна. Способ может дополнительно включать операцию выработки траектории ожидания, причем эта операция включает: выработку маршрута ожидания, размещенного над областью, находящейся вблизи выбранной точке приземления; определение точки перехода вдоль маршрута ожидания; определение точки выхода вдоль маршрута ожидания, из которой беспилотный летательный аппарат может начать следовать вдоль траектории захода на посадку; направление беспилотного летательного аппарата для перехода на маршрут ожидания в точке перехода; направление беспилотного летательного аппарата для выполнения планирующего спуска вдоль маршрута ожидания; и направление беспилотного летательного аппарата для выхода из маршрута ожидания в точке выхода. Маршрут ожидания может быть выполнен круговым. Беспилотный летательный аппарат может быть направлен на выход из маршрута ожидания после снижения беспилотного летательного аппарата ниже заранее определенной выходной высоты полета, то есть, высоты полета беспилотного летательного аппарата, достаточной для выполнения безопасной вынужденной посадки в выбранной точке приземления. Траектория ожидания может быть касательной к участку полета до разворота траектории захода на посадку, причем определено, что точка выхода из траектории ожидания и точка инициирования траектории захода на посадку размещены в точке соприкосновения траектории ожидания и участка полета до разворота. Способ может дополнительно включать операцию непрерывного измерения текущих условий полета посредством датчиков, размещенных на борту беспилотного летательного аппарата. Условия полета могут включать: информацию о местоположении и навигации беспилотного летательного аппарата; уровень топлива на борту беспилотного летательного аппарата; и атмосферные условия вблизи беспилотного летательного аппарата. Операция определения качества планирующего спуска беспилотного летательного аппарата может включать автоматическое обучение с получением величины качества планирующего спуска посредством итеративного определения значения качества планирующего спуска до его сходимости к определенному значению, причем автоматическое обучение, по меньшей мере частично, эмпирическое. Автоматическое обучение может быть инициировано после начала следования беспилотного летательного аппарата по траектории захода на посадку. Беспилотный летательный аппарат может работать автономно. Участок полета с U-образным разворотом может быть выполнен полукруглым.
В соответствии с другой особенностью настоящего изобретения дополнительно предложен беспилотный летательный аппарат с двигателем, выполненным с возможностью автономной безопасной вынужденной посадки в случае отказа двигателя. Беспилотный летательный аппарат содержит систему управления полетом, предназначенную для управления полетом беспилотного летательного аппарата, и систему безопасной вынужденной посадки, соединенную с системой управления полетом. Система управления полетом содержит блок обработки. Система безопасной вынужденной посадки содержит запоминающее устройство, пригодное для считывания блоком обработки системы управления полетом, практически осуществляющее программу с командами, выполняемую блоком обработки, для выполнения операций способа безопасной вынужденной посадки беспилотного воздушного аппарата в случае отказа двигателя. Операции способа включают выработку траектории захода на посадку, которая содержит: участок полета до разворота, имеющий начало в точке инициирования траектории; участок после разворота имеющий конец в выбранной точке приземления; и участок полета с U-образным разворотом, размещенный между участком полета до разворота и участком после разворота. Операции способа дополнительно включают: подачу траектории захода на посадку в систему управления полетом для направления беспилотного летательного аппарата в точку инициирования для следования по участку полета до разворота; и многократное определение качества планирующего спуска беспилотного летательного аппарата, основанное на текущих условиях полета беспилотного летательного аппарата. Операции способа дополнительно включают многократное определение текущей точки разворота вдоль участка полета до разворота для выполнения посадки беспилотного летательного аппарата в текущей точке приземления, инициацию участка полета с U-образным разворотом в текущей точке разворота, причем определение текущей точки разворота основано на определенном значении качества планирующего спуска. Операции способа дополнительно включают: многократную подачу текущей точки разворота в систему управления полетом для направления беспилотного летательного аппарата посредством планирующего спуска к текущей точке разворота; и при достижении беспилотным летательным аппаратом текущей точки разворота предписание системе управления полетом направить беспилотный летательный аппарат для следования по участку полета с U-образным разворотом и по участку после разворота траектории захода на посадку с целью выполнения посадки беспилотного летательного аппарата в выбранной точке приземления. Условия полета беспилотного летательного аппарата могут включать: информацию о местоположении и навигации беспилотного летательного аппарата, уровень топлива на борту беспилотного летательного аппарата; и атмосферные условия вблизи беспилотного летательного аппарата. Беспилотный летательный аппарат может дополнительно содержать: датчик для непрерывной подачи информации о местоположении и навигации; датчик для непрерывного указания на уровень топлива на борту беспилотного летательного аппарата; и/или датчик для непрерывной подачи информации о состоянии атмосферы вблизи беспилотного летательного аппарата. Программа с командами для системы безопасной вынужденной посадки может представлять собой программу, пригодную для дальнейшего выполнения операции способа для многократного определения точки приземления, соответствующей текущей точке разворота, на основании определенного значения качества планирующего спуска, причем операция определения текущей точки разворота выполнена с учетом различия между точкой приземления, которая была ранее определена в соответствии с ранее определенной точкой разворота, и выбранной точкой приземления. Система безопасной вынужденной посадки может быть внедрена в систему управления полетом. Беспилотный летательный аппарат может дополнительно содержать базу данных, содержащую набор точек приземления при вынужденной посадке беспилотного летательного аппарата. Программа с командами для системы безопасной вынужденной посадки может представлять собой программу, пригодную для дополнительного выполнения операции способа по выбору определенной точки приземления из набора точек приземления, в которой определенная предполагаемая высота полета беспилотного летательного аппарата над выбранной точкой приземления достаточна, чтобы обеспечить беспилотному летательному аппарату возможность выполнения безопасной вынужденной посадки в выбранной точке приземления, и в которой предполагаемая высота полета определена на основании определенного значения качества планирующего спуска. Программа с командами для системы безопасной вынужденной посадки может представлять собой программу, пригодную для дальнейшего выполнения следующих операций способа: определение предполагаемой высоты полета беспилотного летательного аппарата над выбранной точкой приземления на основании определенного значения качества планирующего спуска; определение возможности выполнения планирующего спуска вдоль траектории ожидания, основанное на том, превышает ли предполагаемая высота полета беспилотного летательного аппарата минимальную высоту, заранее указанную, как обеспечивающую возможность безопасной вынужденной посадки в выбранной точке приземления; и предписание системе управления полетом направить беспилотный летательный аппарат для выполнения планирующего спуска вдоль траектории ожидания при ее возможности. Программа с командами для системы безопасной вынужденной посадки может быть пригодна для последующего выполнения операций способа по выработке маршрута ожидания, размещенного над областью, находящейся вблизи выбранной точке приземления; определения точки перехода вдоль маршрута ожидания; определения точки выхода вдоль маршрута ожидания, из которой беспилотный летательный аппарат может начать следовать вдоль траектории захода на посадку. Операция способа может дополнительно включать подачу сформированной траектории ожидания в систему управления полетом для направления беспилотного летательного аппарата с целью перехода на маршрут ожидания в точке перехода, выполнения планирующего спуска вдоль маршрута ожидания и выхода из маршрута ожидания в точке выхода. Операция способа по определению качества планирующего спуска беспилотного летательного аппарата может включать автоматическое обучение с получением величины качества планирующего спуска посредством итерационного определения значения качества планирующего спуска до его сходимости к определенному значению, причем автоматическое обучение, по меньшей мере частично, эмпирическое.
В соответствии с еще одной особенностью настоящего изобретения предложена система для установки на беспилотном летательном аппарате с двигателем, обеспечивающая возможность безопасной вынужденной посадки беспилотного летательного аппарата в случае отказа двигателя. Эта система соединена с системой управления полетом беспилотного летательного аппарата. Система содержит запоминающее устройство, пригодное для считывания блоком обработки системы управления полетом, практически осуществляющей программу с командами, выполняемую блоком обработки для реализации операций способа. Операции способа включают выработку траектории захода на посадку, которая содержит: участок полета до разворота, имеющий начало в точке инициирования траектории; участок после разворота, имеющий конец в выбранной точке приземления; и участок полета с U-образным разворотом, размещенный между участком полета до разворота и участком после разворота. Операции способа дополнительно включают: подачу траектории захода на посадку в систему управления полетом для направления беспилотного летательного аппарата в точку инициирования для следования по участку полета до разворота; и многократное определение качества планирующего спуска беспилотного летательного аппарата, основанное на текущих условиях полета беспилотного летательного аппарата. Операции способа дополнительно включают многократное определение текущей точки разворота вдоль участка полета до разворота для выполнения посадки беспилотного летательного аппарата в выбранной точке приземления, инициацию участка маршрута полета с U-образным разворотом в текущей точке разворота, причем определение текущей точки разворота основано на определенном значении качества планирующего спуска. Операции способа дополнительно включают: многократную подачу текущей точки разворота в систему управления полетом для предписания беспилотному летательному аппарату выполнить планирующий спуск к текущей точке разворота; и при достижении беспилотным летательным аппаратом текущей точки разворота предписания системе управления полетом направить беспилотный летательный аппарат для следования по участку маршрута полета с U-образным разворотом и по участку после разворота траектории захода на посадку, для выполнения посадки беспилотного летательного аппарата в выбранной точке приземления.
Краткое описание чертежей
Раскрытое изобретение будет более полно понято и оценено из следующего подробного описания изобретения со ссылками на чертежи, на которых:
На фиг. 1 схематически показан вид сверху тромбонного захода на посадку в соответствии с известным уровнем техники;
На фиг. 2А схематически показан вид сверху беспилотного летательного аппарата в случае отказа двигателя, выполняющего планирующий спуск вдоль траектории тромбонного захода на посадку, построенной и действующей в соответствии с вариантом реализации настоящего изобретения;
На фиг. 2В схематически показан вид сбоку беспилотного летательного аппарата по фиг. 2А, выполняющего планирующий спуск вдоль траектории тромбонного захода на посадку;
На фиг. 3А показана блок-схема способа для безопасной вынужденной посадки беспилотного летательного аппарата, действующая в соответствии с другим вариантом реализации настоящего изобретения;
На фиг. 3В схематически показана блок-схема способа для выработки траектории ожидания и выполнения планирующего спуска вдоль нее, причем эта траектория соединена с траекторией тромбонного захода на посадку в соответствии со способом по фиг. 3А;
На фиг. 4 схематически показан вид сверху взятой в качестве примера траектории ожидания, соединенной с взятой в качестве примера траекторией тромбонного захода на посадку, построенной и действующей в соответствии со способами по фиг. 3А и 3В;
На фиг. 5 схематически показан вид сверху, иллюстрирующий определение точки разворота для беспилотного летательного аппарата, выполняющего планирующий спуск вдоль траектории тромбонного захода на посадку, построенной и действующей в соответствии со способом по фиг. 3А; и
На фиг. 6 схематически показана блок-схема размещения бортовых систем полета беспилотного летательного аппарата, включая систему безопасной вынужденной посадки, построенную и действующую в соответствии с еще одним вариантом реализации настоящего изобретения.
Подробное описание вариантов реализации настоящего изобретения
Раскрытое техническое решение устраняет недостатки известного уровня техники, предлагая систему и способ, обеспечивающие возможность автономной безопасной посадки беспилотного летательного аппарата в выбранной точке приземления в случае отказа двигателя. Раскрытые система и способ обеспечивают возможность беспилотному летательному аппарату, или удаленно пилотируемому или автономно управляемому, выполнить благополучное приземление, не подвергая опасности окружающее население и с минимальными повреждениями, если они вообще есть, наносимыми беспилотному летательному аппарату и его бортовым системам. В целом, раскрытые система и способ обеспечивают возможность такой безопасной посадки, используя заход на посадку, известный как «тромбонный заход на посадку», регулируемый и усовершенствуемый в режиме реального времени в зависимости от текущих условий полета беспилотного летательного аппарата и его определенного значения качества планирующего спуска. Определение значения качества планирующего спуска беспилотного летательного аппарата выполнено итеративным образом в режиме реального времени инструментом автоматического обучения, обеспечивающим получение конкретного и относительно точного значения качества. Определение фактического качества планирующего спуска и выработка определенных траекторий тромбонного типа, регулируемых согласно текущим условиям полета, обеспечивают возможность беспилотному летательному аппарату приземляться в выбранной точке приземления сравнительно точным образом.
При использовании здесь термин «летательный аппарат» охватывает пилотируемые и непилотируемые летательные аппараты, включая беспилотные летательные аппараты. Термин «беспилотный летательный аппарат» при использовании здесь охватывает беспилотные летательные аппараты с двигателем, включая удаленно управляемые беспилотные летательные аппараты или беспилотные летательные аппараты с автономным управлением. Термин «участок маршрута полета с U-образным разворотом» при использовании здесь означает по существу разворот на 180 градусов, который может быть выполнен в виде полукруглой траектории (то есть, в виде половины круга), но это не обязательно и разворот может, например, содержать прямолинейные сегменты. Термин «горизонтальный» и его словоизменения при использовании здесь относятся к горизонтальному направлению относительно поверхности Земли. Термины «непрерывно» и «многократно» и их словоизменения, используемые здесь как описательные термины для операции или последовательности операций согласно раскрытого технического решения, могут иметь отношение к непрерывным или повторным операциям или последовательностям операций, выполняемым, по меньшей мере, однократно и с постоянными или переменными временными интервалами, если не предписано иное. Термин «условия полета» при использовании здесь может иметь отношение к атмосферным условиям, таким как температура воздуха, плотность воздуха или давление воздуха и направление и скорость ветра, и к условиям, имеющим отношение к беспилотному летательному аппарату, таким как суммарный вес (то есть, с учетом веса топлива) и высота полета беспилотного летательного аппарата. Термин «высота полета над уровнем моря» при использовании здесь относится к вертикальному расстоянию над уровнем моря. Термин «высота над уровнем земли» при использовании здесь относится к вертикальному расстоянию над поверхностью земли, обычно над точкой приземления, если не предписано иное. Термин «после» при использовании здесь для описания относительного отсчета времени между двумя событиями может иметь отношение к событию, происходящему одновременно с другим событием или в некоторый момент времени до или после другого события. Фраза «посадка в точке приземления» и ее словоизменения при использовании здесь относятся к посадке в непосредственной близости от точки приземления, предпочтительно в пределах заранее определенного небольшого расстояния от точки приземления. Термин «определение» и его словоизменения при использовании здесь охватывают операции вычисления, оценки, измерения или установки. Термин «автоматическое обучение» и его словоизменения при использовании здесь относятся к операции или к последовательности операций обучения автоматическим образом.
Обратимся теперь к фиг. 2А и 2В, представляющим собой схематические иллюстрации беспилотного летательного аппарата, в целом обозначенного как 110, потерпевшего отказ двигателя и выполняющего планирующий спуск вдоль траектории тромбонного захода на посадку, в целом обозначенной как 100, построенной и работающей в соответствии с вариантом реализации настоящего изобретения. Фиг. 2А представляет собой схематический вид сверху при планирующем спуске беспилотного летательного аппарата 110 вдоль траектории 100 тромбонного захода на посадку. Беспилотный летательный аппарат 110, потерпевший отказ двигателя, выполняет планирующий спуск вдоль траектории 100 тромбонного захода на посадку для посадки в выбранной точке 120 приземления. Траектория 100 тромбонного захода на посадку содержит участок 150 полета до разворота, участок 160 полета с U-образным разворотом и участок 170 после разворота. Участок 170 после разворота вытянут горизонтально вдоль пути 130 посадки. Путь 130 посадки представляет собой по существу прямую линию, проходящую через точку 120 приземления и направленную горизонтально по существу вдоль направления посадки. Участок 150 полета до разворота вытянут горизонтально вдоль пути 140 до разворота. Путь 140 до разворота представляет собой по существу прямую линию, направленную по существу горизонтально против направления посадки на выбранном горизонтальном расстоянии 135 (также обозначенном как R) от пути 130 посадки. Таким образом, участок 150 полета до разворота и участок 170 после разворота представляют собой по существу прямые линии, параллельные друг другу. Участок 160 полета с U-образным разворотом соединяет участок 150 полета до разворота и участок 170 после разворота. Участок 160 полета с U-образным разворотом выполнен полукруглым и имеет горизонтальный радиус 155 разворота, равный R/2, что обеспечивает возможность беспилотному летательному аппарату 110 выполнять по существу разворот от участка 150 полета до разворота к участку 170 после разворота. Участок 160 полета с U-образным разворотом, и следовательно, расстояние 135 между путем 130 посадки и путем 140 до разворота, ограничены минимальным радиусом разворота беспилотного летательного аппарата 110. Термин «минимальный радиус разворота» при использовании здесь относится к самому малому радиусу разворота летательного аппарата, который обеспечивает возможность летательному аппарату выполнить полукруглый разворот. Минимальный радиус разворота определен согласно характеристикам летательного аппарата. Следовательно, минимальный радиус разворота беспилотного летательного аппарата заранее определен и известен.
В соответствии с раскрытым техническим решением предпочтительно, чтобы длина траектории тромбонного захода на посадку была по возможности короче, поскольку ошибка при приземлении (то есть, расхождение между фактической точкой приземления и выбранной точкой приземления) пропорциональна этой длине. Кроме того, чем короче траектория тромбонного захода на посадку, тем ближе беспилотный летательный аппарат выполняет планирующий спуск к выбранной точке приземления. Планирующий спуск в непосредственной близости от выбранной точки приземления уменьшает вероятность планирующего спуска над густонаселенной областью и избегает связанных с этим рисков. Следовательно, согласно раскрытому техническому решению длина радиуса предпочтительно полукруглого участка полета с U-образным разворотом траектории тромбонного захода на посадку приблизительно равна минимальному радиусу разворота беспилотного летательного аппарата.
Согласно раскрытому техническому решению траектория тромбонного захода на посадку может также быть выполнена прямоугольной, то есть, содержать по существу прямолинейный участок полета с U-образным разворотом с закругленными концами для выполнения разворота от участка полета до разворота к участку после разворота. Беспилотный летательный аппарат, выполняющий планирующий спуск вдоль прямоугольной траектории тромбонного захода на посадку, планирует по существу прямолинейно вдоль участка полета до разворота, затем выполняет поворот к участку полета с U-образным разворотом и планирует по существу прямолинейно вдоль участка полета с U-образным разворотом и затем снова выполняет разворот к участку после разворота. Такие развороты, поскольку они предназначены лишь для облегчения смены направления, не обязаны быть точными. Напротив, полукруглый участок полета с U-образным разворотом требует выполнения планирующего спуска беспилотным летательным аппаратом точно вдоль круговой траектории, что, следовательно, приводит к особенно жесткому управлению полетом. С другой стороны, полукруглый участок полета с U-образным разворотом обеспечивает лучшую точность при приземлении (то есть, относительно отклонения от выбранной точки приземления) и, таким образом, также обеспечивает возможность получения более коротких траекторий.
Обратимся теперь к фиг. 2В, схематически иллюстрирующей вид сбоку беспилотного летательного аппарата 110, выполняющего планирующий спуск вдоль траектории 100 тромбонного захода на посадку над землей 180. Как известно в этой области техники, понижение планирующего летательного аппарата обычно определено его значением качества планирующего спуска. Следовательно, профиль спуска беспилотного летательного аппарата 110, показанный как вид сбоку траектории 100 тромбонного захода на посадку по фиг. 2В, может быть определен его качеством планирующего спуска, то есть, отношением расстояния, проходимого вперед по дистанции планирующего спуска, обозначенного как ΔS, к расстоянию, проходимому вниз по дистанции планирующего спуска, обозначенному как ΔН, в течение одного и того же временного интервала, определяемым следующим образом:
Качество планирующего спуска = 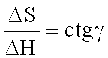
где γ обозначает угол планирования. Качество планирующего спуска равно аэродинамическому качеству летательного аппарата при постоянной скорости и невозмущенной атмосфере. Качество планирующего спуска летательного аппарата обычно зависит от его аэродинамических характеристик и веса. На значение качества планирующего спуска обычно воздействует воздушная скорость воздуха и высота полета над уровнем моря, с которой выполняет планирующий спуск летательный аппарат. На качество планирующего спуска также воздействует ветер, поскольку он изменяет путевую скорость летательного аппарата (например, попутный ветер увеличивает значение качества планирующего спуска, а встречный ветер уменьшает его).
Следует иметь ввиду, что хотя показанный на фиг. 2А и 2В участок 160 полета с U-образным разворотом представляет собой левый разворот, согласно раскрытому техническому решению участок полета с U-образным разворотом траектории тромбонного захода на посадку может быть или левым или правым разворотом относительно беспилотного летательного аппарата. Следует также отметить, что поскольку питание на беспилотный летательный аппарат 110 не поступает (ввиду отказа двигателя) и он, таким образом, выполняет планирующий спуск, наиболее вероятно непрерывное снижение беспилотного летательного аппарата 110 с преобразованием потенциальной энергии в скорость.
Обратимся теперь к фиг. 3А, представляющей собой блок-схему способа безопасной вынужденной посадки беспилотного летательного аппарата, работающего в соответствии с другим вариантом реализации раскрытого технического решения. Способ дополнительно описан со ссылками на фиг. 4 и 5. На фиг. 4 схематически показан вид сверху взятой в качестве примера траектории ожидания, в целом обозначенной как 500, соединенной с взятой в качестве примера траекторией тромбонного захода на посадку, в целом обозначенной как 510, построенной и действующей в соответствии со способами по фиг. 3А и 3В. На фиг. 5 схематически показан вид сверху, иллюстрирующий определение точки разворота для беспилотного летательного аппарата, в целом обозначенного как 600, выполняющего планирующий спуск вдоль траектории тромбонного захода на посадку, в целом обозначенной как 610, построенной и действующей в соответствии со способом по фиг. 3А.
В ходе операции 200 происходит выбор точки приземления, обеспечивающей возможность безопасной посадки беспилотного летательного аппарата в случае отказа двигателя. Выбор точки приземления может происходить непрерывно и может быть начат до отказа двигателя. Например, выбор точки приземления может происходить непрерывно с начала полета, пока не произойдет отказ двигателя. Каждый мгновенный выбор точки приземления основан на текущих условиях полета беспилотного летательного аппарата, включая текущее местоположение беспилотного летательного аппарата. В качестве альтернативы выбор точки приземления может быть выполнен только после отказа двигателя.
Точка приземления может быть выбрана из базы данных, включающей имеющую отношение к делу информацию, например, информацию, относящуюся к набору точек приземления для вынужденной посадки, или цифровые карты. Информация, относящаяся к определенной точке приземления, предпочтительно содержит, по меньшей мере, направление взлетно-посадочной полосы, на которой размещена определенная точка приземления, и географическое положение (то есть, долготу, широту и высоту над уровнем моря) выбранной точки приземления. База данных может быть размещена на борту беспилотного летательного аппарата или в удаленном месте, например, на наземной станции. Точка безопасного приземления (то есть, точка приземления, обеспечивающая возможность безопасной вынужденной посадки беспилотного летательного аппарата) должна быть размещена на таком расстоянии от текущего местоположения беспилотного летательного аппарата, которое обеспечивает возможность беспилотному летательному аппарату прибывать в окрестность точки приземления с достаточной высотой над уровнем земли (то есть, с потенциальной энергией), чтобы выполнить тромбонный заход на посадку согласно раскрытому техническому решению. Необходимая минимальная высота над уровнем земли может быть заранее определена соответствующим образом (например, эмпирически для определенного типа беспилотного летательного аппарата). Термин «минимальная высота над уровнем земли» при использовании здесь относится к пороговому значению для высоты беспилотного летательного аппарата над точкой приземления (то есть, относительно высоты точки приземления над уровнем моря), которое указывает на минимальную высоту над уровнем земли, необходимую беспилотному летательному аппарату для посадки в соответствующей точке приземления при использовании тромбонного захода на посадку согласно раскрытому техническому решению.
Определение предполагаемой высоты полета беспилотного летательного аппарата над желательным местоположением (например, над возможной точкой приземления) согласно раскрытому техническому решению обычно выполнено, если не предписано иное, в предположении по существу прямолинейной траектории планирующего спуска от текущего местоположения беспилотного летательного аппарата в желательное местоположение и при рассмотрении определенного значения качества планирующего спуска беспилотного летательного аппарата и текущих условий полета.
Определение значения качества планирующего спуска беспилотного летательного аппарата согласно раскрытому техническому решению может быть выполнено с различной степенью точности. Относительно более точный способ определения значения качества планирующего спуска согласно раскрытому техническому решению состоит в использовании операции автоматического обучения, которая проводит автоматическое обучение с получением значения качества планирующего спуска беспилотного летательного аппарата (см. операцию 280 ниже). На стадии выбора точки приземления предпочтительно определение качества планирующего спуска способом, который относительно менее точен, но вполне достаточен для этой задачи и экономит вычислительные ресурсы. Определение значения качества планирующего спуска может быть выполнено многократно и предполагает выполнение безмоторного планирующего спуска беспилотного летательного аппарата при заранее определенной воздушной скорости из текущего местоположения (определяемого долготой, широтой и высотой полета над уровнем моря) беспилотного летательного аппарата, а также учитывает текущие условия полета. Количество или вес топлива на борту беспилотного летательного аппарата, высота полета беспилотного летательного аппарата над уровнем моря, атмосферные условия вблизи беспилотного летательного аппарата, включая направление и скорость ветра, могут быть непрерывно измерены или проконтролированы датчиками на борту беспилотного летательного аппарата или, если это возможно, могут быть непрерывно предоставляемыми наземными станциями или системами, размещенными внешним образом. Определение качества планирующего спуска может быть начато после отказа двигателя или до этого события, в частности, после активизации операции выбора точки приземления. Термин «определенное значение качества планирующего спуска» при использовании здесь относится к конкретному значению качества планирующего спуска при обеспечении или получении этого конкретного значения (например, посредством использования операции автоматического обучения), в противном случае этот термин относится к мгновенно определяемому значению качества планирующего спуска.
После идентификации точки безопасного приземления она может быть немедленно выбрана или в качестве альтернативы выбор точки приземления может быть улучшен посредством выполнения дополнительной операции, включающей определение местоположения многих возможных точек безопасного приземления и затем выбор наиболее подходящей точки. Такая точка приземления может быть точкой, над которой наиболее велика определенная предполагаемая высота полета беспилотного летательного аппарата. Увеличенная определенная предполагаемая высота полета беспилотного летательного аппарата над выбранной точкой приземления увеличивает вероятность того, что беспилотный летательный аппарат сможет фактически прибыть в окрестность выбранной точки приземления с достаточной высотой над уровнем земли, чтобы выполнить тромбонный заход на посадку согласно раскрытому техническому решению. Можно рассматривать и другие критерии, такие как цели плана полета, расстояние между текущим местоположением беспилотного летательного аппарата и безопасной точкой приземления, время прибытия в точку над точкой безопасного приземления, ветровые условия вдоль траектории к точке безопасного приземления или степень изоляции точки безопасного приземления (например, расстояние от населенной области или легко повреждаемого имущества).
Выбор точки приземления может быть выполнен автоматически системами, размещенными на борту или удаленно, или удаленно размещенным оператором беспилотного летательного аппарата. При автоматическом выборе точки приземления системами на борту беспилотного летательного аппарата удаленный оператор или удаленная система могут контролировать выбор и отвергать выбранную точку приземления, если другая точка приземления более предпочтительна. Следует иметь ввиду, что различные системы и способы выбора точки посадки для вынужденной посадки летательного аппарата известны в этой области техники и могут быть внедрены в раскрытое техническое решение и/или быть осуществлены согласно раскрытому техническому решению.
В ходе операции 210 после отказа двигателя беспилотный летательный аппарат направлен для выполнения планирующего спуска к выбранной в данный момент точке приземления. При отсутствии выбранной точки приземления до события отказа двигателя выбор точки приземления выполняют согласно операции 200, предшествующей операции 210. Предпочтительно, чтобы беспилотный летательный аппарат был направлен для выполнения планирующего спуска вдоль по существу прямолинейной траектории к выбранной точке приземления и при заранее определенной воздушной скорости, соответствующей его текущему полному весу.
В ходе операции 220 происходит непрерывное определение условий полета беспилотного летательного аппарата, значения качества планирующего спуска и предполагаемой высоты полета над выбранной точкой приземления. Непрерывное определение предполагаемой высоты полета беспилотного летательного аппарата над выбранной точкой приземления выполнено на основании определенного значения качества планирующего спуска и текущих условий полета.
Дополнительная операция прекращения может быть выполнена на данной стадии при падении значения определенной предполагаемой высоты полета беспилотного летательного аппарата над выбранной точкой приземления ниже минимальной высоты полета над уровнем земли, так что беспилотный летательный аппарат больше не может выполнить тромбонный заход на посадку согласно раскрытому техническому решению. В качестве альтернативы такая операция прекращения может быть активизирована, когда текущая высота полета беспилотного летательного аппарата над уровнем земли (непрерывно контролируемая системами полета беспилотного летательного аппарата) такова, что его текущая высота полета над уровнем земли падает ниже минимальной высоты полета над уровнем земли. Эта операция прекращения может включать направление беспилотного летательного аппарата для выполнения вынужденной посадки, известной в этой области техники. При удаленном управлении беспилотным летательным аппаратом оператор может быть уведомлен о таком событии и может направить беспилотный летательный аппарат в другую точку приземления, которая может по существу обеспечивать возможность вынужденной посадки.
Обычно запуск операции 220 (полностью или частично, в зависимости от конкретных требований) происходит, самое позднее, после активации операции выбора точки приземления (то есть, операции 200), и имеет место непрерывное выполнение операции 220 в ходе реализации способов по фиг. 3А и 3В.
В ходе операции 230 происходит выработка маршрута ожидания. Эта операция может быть выполнена на более поздних стадиях способа, например, до или после рассмотрения возможности реализации траектории ожидания (то есть, операции 250), или как часть способа выработки и выполнения планирующего спуска вдоль траектории ожидания (например, операция 340 по фиг. 3В). Маршрут ожидания может быть использован при необходимости уменьшенной высоты полета беспилотного летательного аппарата над уровнем земли перед выполнением тромбонного захода на посадку согласно раскрытому техническому решению. Беспилотный летательный аппарат может уменьшить свою высоту над уровнем земли в течение периода ожидания, в ходе которого он выполняет планирующий спуск вдоль траектории ожидания.
Согласно раскрытому техническому решению траектория ожидания содержит маршрут ожидания, точку перехода и точку выхода. Маршрут ожидания определяет форму, размер и положение траектории ожидания относительно выбранной точки приземления согласно раскрытому техническому решению. Предпочтительно выполнение маршрута ожидания в виде круга. Маршрут ожидания размещен над областью вблизи выбранной точки приземления и предпочтительно окружает выбранную точку приземления таким образом, чтобы центр маршрута ожидания был размещен существенно выше выбранной точки приземления. Могут быть использованы различные формы или маршруты траектории ожидания, например, маршруты, которые по существу, выполнены в виде квадрата, или маршруты, которые не обязательно окружают выбранную точку приземления. Минимальный круговой маршрут ожидания, по которому может следовать беспилотный летательный аппарат, представляет собой круг с радиусом, равным минимальному радиусу разворота беспилотного летательного аппарата. Кроме того, предпочтительный маршрут ожидания касателен к пути до разворота траектории тромбонного захода на посадку, что обеспечивает беспилотному летательному аппарату возможность немедленно начать перемещение по траектории тромбонного захода на посадку сразу после его выхода из траектории ожидания. Иначе, использование вспомогательной траектории было бы необходимо для обеспечения беспилотному летательному аппарату возможности прибытия в точку инициирования траектории тромбонного захода на посадку при подходящей ориентации, чтобы следовать по траектории тромбонной посадки. Маршрут ожидания беспилотного летательного аппарата может быть определен заранее. В качестве альтернативы может быть выполнен выбор наиболее подходящего маршрута из нескольких дополнительных маршрутов при учете текущих условий полета или других соответствующих критериев.
Обратившись к фиг. 4, можно видеть, что траектория 500 ожидания содержит круговой маршрут ожидания (не показан), окружающий выбранную точку 520 приземления (также обозначенную как «EMR») таким образом, что точка 520 приземления размещена в центре кругового маршрута ожидания. Радиус маршрута ожидания равен удвоенному радиусу разворота беспилотного летательного аппарата (обозначенного как R/2) и, соответственно, обозначен как R. Круговой маршрут ожидания может быть сформирован посредством определения четырех промежуточных точек WP1, WP2, WP3 и WP4, равномерно разделяющих круговой маршрут на четыре дуги по 90°.
Другая желательная конфигурация маршрута ожидания представляет собой круговой маршрут ожидания с радиусом, приблизительно равным радиусу разворота беспилотного летательного аппарата. Меньший радиус обеспечивает более короткую траекторию ожидания, что может быть выгоднее согласно раскрытому техническому решению (например, обеспечивая большую точность посадки или большее приближение к выбранной точке приземления). Снова обратившись к фиг. 4, можно видеть, что такой маршрут ожидания имел бы радиус, равный R/2. Кроме того, предпочтительно, чтобы такая траектория ожидания проходила над выбранной точкой приземления.
В ходе операции 240 определены основные данные для выработки траектории тромбонного захода на посадку согласно раскрытому техническому решению (именуемые здесь как «основные данные о тромбонной траектории»). Основные данные о тромбонной траектории включают, по меньшей мере, радиус разворота, путь до разворота и точку инициирования. Радиус разворота беспилотного летательного аппарата может быть определен заранее. Как предписано выше, предпочтительное значение радиуса разворота приблизительно равно минимальному радиусу разворота беспилотного летательного аппарата. Путь до разворота представляет собой горизонтальный путь, по существу прямолинейный и параллельный взлетно-посадочной полосе, на которой размещена выбранная точка приземления. Путь до разворота определяет горизонтальное направление или путь, вдоль которого происходит планирующий спуск беспилотного летательного аппарата при перемещении по участку полета до разворота траектории тромбонного захода на посадку. В горизонтальном направлении путь до разворота по существу размещен на расстоянии от выбранной точки приземления, равном удвоенному радиусу разворота, что обеспечивает возможность беспилотному летательному аппарату выполнить разворот от пути до разворота и выполнить планирующий спуск по прямолинейной траектории к выбранной точке приземления (то есть, вдоль пути после разворота).
Путь после разворота может также быть определен как часть этой операции. Путь после разворота определяет горизонтальное направление или путь, вдоль которого беспилотный летательный аппарат выполняет планирующий спуск после разворота к выбранной точке приземления, перемещаясь по участку после разворота траектории тромбонного захода на посадку. Путь после разворота представляет собой горизонтальный путь, выполненный по существу прямолинейным и по существу проходящий вдоль средней линии взлетно-посадочной полосы, на которой размещена выбранная точка приземления (например, вдоль средней линии 60 по фиг. 1), и таким образом, что он в горизонтальном направлении пересекает выбранную точку приземления. Следовательно, путь после разворота по существу параллелен пути до разворота, а радиус разворота определяет расстояние между путем до разворота и путем после разворота. Путь до разворота направлен вдоль направления до разворота, а путь после разворота направлен вдоль направления после разворота. Направления до и после разворота определены относительно ориентации взлетно-посадочной полосы, на которой размещена выбранная точка приземления. Таким образом, одно направление взлетно-посадочной полосы определено как направление до разворота, а противоположное направление определено как направление после разворота. Согласно раскрытому техническому решению (например, операции 220) направление ветра непрерывно задано или определено (например, на основании непрерывного измерения воздушной скорости и путевой скорости). Таким образом, направления до и после разворота определены на основании текущего направления ветра и относительно направлений, определенных взлетно-посадочной полосой. На фиг. 4 взлетно-посадочная полоса (не показана) вытянута между направлением на северо-восток и направлением на юго-запад (северное направление обозначено как «N», а восточное направление обозначено как «Е»). Азимутальный угол взлетно-посадочной полосы обозначен как «RWY_AZM». Согласно взятому в качестве примера направлению ветра, направление до разворота идет на юго-запад, а направление после разворота идет на северо-восток.
Точка инициирования определяет такое местоположение вдоль пути до разворота, в котором беспилотный летательный аппарат начинает следовать вдоль траектории тромбонного захода на посадку и участка полета до разворота, соответственно. Точка инициирования размещена по существу вдоль пути до разворота и предпочтительно вблизи точки приземления. Кроме того, предпочтительно, чтобы точка инициирования была размещена в точке касания маршрута ожидания и пути до разворота, обеспечивая возможность беспилотному летательному аппарату следовать вдоль траектории тромбонного захода на посадку после его выхода из маршрута ожидания. На фиг. 4 радиус разворота заранее определен (показан равным R/2). Выбранная точка 520 приземления размещена вдоль пути 550 после разворота, параллельного пути 540 до разворота. Расстояние между путем 550 после разворота и путем 540 до разворота равно удвоенному радиусу разворота, соответственно обозначенному как R. Путь 540 до разворота касателен к маршруту ожидания в промежуточной точке WP1, которая определена как точка 530 инициирования траектории 510 тромбонного захода на посадку.
Предпочтительно, чтобы определение основных данных о тромбонной траектории было выполнено после достижения беспилотным летательным аппаратом выбранной точки приземления, но может быть выполнено (по меньшей мере, частично) и на более ранней стадии. Может быть определено пороговое значение, указывающее то расстояние беспилотного летательного аппарата от выбранной точки приземления, при котором должна быть начата эта операция (240). При использовании траектории ожидания определение основных данных о тромбонной траектории или ее части (при необходимости) может быть выполнено как часть операций, имеющих отношение к выработке траектории ожидания или к выполнению планирующего спуска вдоль этой траектории (операция 230 или способ по фиг. 3В). Следует иметь ввиду, что информация, представленная в виде путей до и после разворота, может быть сформирована в виде информации лишь о направлении (например, при генерации траекторий посредством использования промежуточных точек) или в любом другом известном виде или любым другим известным способом.
В дополнительной операции 250 происходит рассмотрение возможности использования траектории ожидания и принятие соответствующего решения. Беспилотный летательный аппарат может следовать по траектории ожидания только в случае превышения определенной предполагаемой высотой полета беспилотного летательного аппарата над выбранной точкой приземления минимальной высоты над уровнем земли. Выполнение планирующего спуска вдоль траектории ожидания обеспечивает беспилотному летательному аппарату возможность уменьшения своей избыточной высоты полета над уровнем земли до начала тромбонного захода на посадку. Инициирование тромбонного захода на посадку согласно раскрытому техническому решению с более низкой высотой полета над уровнем земли означает более короткую траекторию посадки, что уменьшает ошибку при приземлении и удерживает беспилотный летательный аппарат в непосредственной близости от выбранной точки приземления. При каждом определении предполагаемой высоты полета беспилотного летательного аппарата над выбранной точкой приземления (операция 220) определена возможность использования траектории ожидания. Таким образом, определение того, может ли быть использована траектория ожидания, реализовано многократно согласно мгновенным условиям полета. При возможности реализации траектории ожидания беспилотному летательному аппарату будет предписано выполнить планирующий спуск вдоль сформированной траектории ожидания. Минимальная высота полета ожидания может быть определена для облегчения определения того, возможно ли выполнение планирующего спуска вдоль траектории ожидания. Обычно минимальная высота полета ожидания определяет то пороговое значение высоты полета беспилотного летательного аппарата над выбранной точкой приземления, при котором беспилотный летательный аппарат имеет достаточный излишек высоты полета относительно минимальной высоты полета для выполнения планирующего спуска вдоль траектории ожидания. Такая минимальная высота полета ожидания может быть заранее определена. Итеративное определение возможности реализации траектории ожидания может быть начато при прибытии беспилотного летательного аппарата в точку, отстоящую на определенное расстояние от выбранной точки приземления.
Способ выработки траектории ожидания, предназначенной для перехода на траекторию тромбонного захода на посадку согласно раскрытому техническому решению, показан на фиг. 3В и подробно описан ниже. Могут быть использованы альтернативные методы выработки такой траектории ожидания. Этот способ может быть использован при возможности реализации траектории ожидания согласно операции 250 по фиг. 3А. Как было ранее предписано, согласно раскрытому техническому решению траектория ожидания содержит маршрут ожидания, точку перехода и точку выхода.
В ходе операции 340 происходит выработка маршрута ожидания. Операция 340 аналогична операции 230 по фиг. 3А и может быть выполнена в качестве альтернативы (то есть, выработка маршрута ожидания происходит только при принятии решения о выполнении траектории ожидания в ходе операции 250 по фиг. 3А). На фиг. 4 маршрут ожидания касателен к пути 540 до разворота в промежуточной точке 530 (также обозначенной как WP1). Маршрут ожидания, имеющий радиус, по существу равный радиусу разворота беспилотного летательного аппарата, может быть касателен и к пути 540 до разворота и пути 550 после разворота в двух точках: в промежуточной точке 530 и в точке 520 приземления, соответственно.
В ходе операции 350 происходит определение точки перехода вдоль маршрута ожидания. Предпочтительно, чтобы точка перехода была выбрана с возможностью обеспечения беспилотному летательному аппарату непосредственно следовать по маршруту ожидания без необходимости регулировки ориентации беспилотного летательного аппарата. В противном случае необходима дополнительная вспомогательная траектория. Кроме того, предпочтительно, чтобы точка перехода была по возможности ближе к беспилотному летательному аппарату, чтобы избегать уменьшения высоты полета беспилотного летательного аппарата над уровнем земли. С геометрической точки зрения вышеупомянутые предпочтительные требования могут быть выполнены посредством направления беспилотного летательного аппарата для выполнения планирующего спуска вдоль по существу прямолинейной линии, касательной к круговому маршруту ожидания, при выборе точки приземления в качестве точки перехода. Точка перехода может быть определена на более ранней стадии, например, как часть операции 230 способа по фиг. 3А. На фиг. 4 беспилотный летательный аппарат, прибывающий в окрестность точки 520 приземления, может быть направлен для перехода на маршрут ожидания в одной из промежуточных точек WP0, WP1, WP2 или WP3. Предпочтительно, чтобы ближайшая промежуточная точка была выбрана в качестве точки перехода.
В ходе операции 360 беспилотный летательный аппарат направлен для перехода на маршрут ожидания в точке перехода. На фиг. 4 беспилотный летательный аппарат может выполнить приближение к маршруту ожидания с любого направления и выполнить переход на него в определенной точке перехода (то есть, в одной из промежуточных точек WP0, WP1, WP2 или WP3, предпочтительно в ближайшей из них). Как отмечено выше, плавный переход на траекторию ожидания может быть выполнен посредством указания беспилотному летательному аппарату выполнить горизонтальное планирование вдоль прямолинейной траектории, касательной к маршруту перехода в точке перехода.
В ходе операции 370 беспилотный летательный аппарат направлен для выполнения горизонтального планирования вдоль маршрута ожидания и определена точка выхода. Беспилотный летательный аппарат может выполнять планирующий спуск вдоль маршрута ожидания траектории ожидания только один раз. Такой однократный планирующий спуск может быть выполнен посредством перемещения по всему маршруту ожидания с последующим выходом после прибытия в точку выхода, или в качестве альтернативы посредством простого планирующего спуска от точки перехода в точку выхода. В качестве альтернативы беспилотный летательный аппарат может многократно выполнять планирующий спуск вдоль маршрута ожидания, следуя по спиральной траектории вследствие снижения беспилотного летательного аппарата. Способ планирующего спуска (то есть, выполнение планирующего спуска один раз или многократно вдоль маршрута ожидания) может быть определен заранее или это может быть определено в режиме реального времени согласно текущим условиям полета или заранее определенным параметрам. Например, пороговое значение высоты полета над уровнем земли может быть определено таким образом, что если высота полета беспилотного летательного аппарата до перехода на маршрут ожидания ниже этого порогового значения или равна ему, беспилотному летательному аппарату предписано выполнить планирующий спуск вдоль маршрута ожидания только один раз. Наоборот, если высота полета беспилотного летательного аппарата над уровнем земли до перехода на маршрут ожидания выше порогового значения высоты полета, то ему предписано выполнять планирующий спуск многократно. Многократное выполнение планирующего спуска вдоль маршрута ожидания обычно приводит к большему уменьшению высоты полета по сравнению с выполнением планирующего спуска только один раз вдоль маршрута ожидания.
Предпочтительно, чтобы направление планирующего спуска вдоль маршрута ожидания (то есть, по часовой стрелке или против часовой стрелки) и местоположение точки выхода были определены в соответствии с необходимой ориентацией беспилотного летательного аппарата после его выхода из траектории ожидания, что обеспечивает ему возможность немедленно следовать вдоль траектории тромбонного захода на посадку. Таким образом, траектория ожидания определена таким образом, чтобы беспилотный летательный аппарат был ориентирован вдоль участка полета до разворота при его выходе из маршрута ожидания.
На фиг. 4, вследствие симметричности кругового маршрута ожидания относительно выбранной точки 520 приземления, направление планирующего спуска вдоль маршрута ожидания не существенно. Беспилотный летательный аппарат может выполнять планирующий спуск по часовой стрелке или против часовой стрелки вдоль маршрута ожидания и все же выходить на путь до разворота на том же самом расстоянии от пути 550 после разворота. Разница между этими двумя вариантами направления планирующего спуска выражена в местоположениях пути 540 до разворота, соответствующего участка полета до разворота и точки 530 выхода, и в направлении, в котором беспилотный летательный аппарат должен выполнить разворот при реализации тромбонного захода на посадку. На фиг. 4 направление до разворота ориентировано на юго-запад и обозначено стрелкой вдоль пути 540 до разворота и соответствующего участка полета до разворота. Путь 540 до разворота размещен таким образом, что касается маршрута ожидания в промежуточной точке WP1, которая соответствующим образом определена в качестве точки 530 выхода. Таким образом, для обеспечения возможности выхода беспилотного летательного аппарата в точке 530 выхода при ориентации до разворота (то есть, в юго-западном направлении), направление планирующего спуска вдоль маршрута ожидания должно быть определено по часовой стрелке (не обозначено). Соответствующим образом беспилотный летательный аппарат выполняет правый разворот при планирующем спуске вдоль траектории 510 тромбонного захода на посадку. Наоборот, для выполнения беспилотным летательным аппаратом планирующего спуска против часовой стрелки вдоль маршрута ожидания и спокойного выхода на путь до разворота, путь 540 до разворота должен быть сформирован таким образом, чтобы касаться маршрута ожидания в промежуточной точке WP3, которая будет затем определена в качестве точки 530 выхода. В соответствии с этим беспилотный летательный аппарат выполняет левый разворот, выполняя траекторию 510 тромбонного захода на посадку. Однако, при использовании маршрута ожидания, не окружающего выбранную точку приземления, например, кругового маршрута ожидания, имеющего радиус разворота беспилотного летательного аппарата и пересекающего выбранную точку приземления, только одно направление планирующего спуска способно облегчить выход беспилотного летательного аппарата при его ориентации в направлении до разворота. Например (смотри фиг. 4) такой круговой маршрут ожидания, пересекающий выбранную точку 520 приземления и промежуточную точку WP1, потребовал бы выполнения планирующего спуска в направлении по часовой стрелке для выхода при ориентации в направлении до разворота. В таком случае направления до и после разворота должны быть определены до перехода на маршрут ожидания.
В ходе операции 380 происходит многократное сравнение текущей высоты полета беспилотного летательного аппарата над уровнем земли с высотой выхода. Выполнение этой операции происходит только при выборе варианта с многократным выполнением планирующего спуска для определения момента, когда беспилотный летательный аппарат должен выйти из маршрута ожидания. «Высота выхода» представляет собой высоту над уровнем земли, при которой или ниже которой беспилотный летательный аппарат должен выйти из маршрута ожидания при достижении им точки выхода. Предпочтительно, чтобы определяемое значение высоты выхода превышало значение минимальной высоты полета, причем так, чтобы разность между этими двумя значениями превышала определенное уменьшение высоты полета беспилотного летательного аппарата, выполняющего однократный планирующий спуск вдоль маршрута ожидания. Таким образом, беспилотный летательный аппарат может выйти из маршрута ожидания на высоте, достаточной для выполнения тромбонного захода на посадку с целью приземления в выбранной точке приземления. Такая высота выхода может быть определена заранее. При превышении текущей высотой полета беспилотного летательного аппарата высоты выхода беспилотному летательному аппарату будет предписано продолжать перемещение вдоль маршрута ожидания согласно операции 370. Если текущая высота полета беспилотного летательного аппарата равна высоте выхода или ниже ее, беспилотному летательному аппарату будет предписано выйти из маршрута ожидания при достижении им точки выхода согласно операции 390 (описана здесь ниже). Если беспилотному летательному аппарату предписано выполнить планирующий спуск вдоль маршрута ожидания лишь один раз, то операция 380 не будет выполнена, и беспилотному летательному аппарату будет предписано выйти из маршрута ожидания при достижении им точки выхода согласно операции 390. В этом случае минимальная высота полета должна быть учтена при определении длины траектории ожидания, чтобы обеспечить беспилотному летательному аппарату возможность выхода из траектории ожидания на высоте, равной минимальной высоте полета или выше ее. Независимо от этого, разность между значением высоты полета беспилотного летательного аппарата в начале его перемещения вдоль траектории ожидания и значением минимальной высоты полета должна быть равна значению (или превышать его) определенного уменьшения высоты полета беспилотного летательного аппарата, выполняющего однократный планирующий спуск вдоль маршрута ожидания.
В ходе операции 390 беспилотному летательному аппарату предписано выйти из маршрута ожидания при достижении им точки выхода. На фиг. 4 беспилотный летательный аппарат направлен к выходу из траектории 500 ожидания в точке 530 выхода, которая также представляет собой точку инициирования траектории 510 тромбонного захода на посадку. Поскольку маршрут ожидания касателен к пути 540 до разворота в точке выхода и в точке инициирования 530, беспилотный летательный аппарат размещен в подходящей ориентации для немедленного начала перемещения по пути 540 до разворота после выхода из траектории 500 ожидания. Таким образом, беспилотный летательный аппарат начинает перемещение вдоль траектории 510 тромбонного захода на посадку сразу после выхода из траектории 500 ожидания. На данном этапе происходит завершение способа по фиг. 3В, а способ по фиг. 3А возобновлен посредством операции 260.
Следует иметь ввиду, что могут быть использованы маршруты ожидания, не проходящие через точку инициирования (или не включающие ее) траектории тромбонного захода на посадку согласно раскрытому техническому решению. В таком случае должна быть сформирована и принята во внимание вспомогательная траектория, соединяющую точку выхода траектории ожидания с точкой инициирования траектории тромбонного захода на посадку. Кроме того, такая вспомогательная траектория должна обеспечивать возможность беспилотному летательному аппарату достигать точки инициирования с подходящей ориентацией, чтобы обеспечивать возможность беспилотному летательному аппарату следовать по траектории тромбонного захода на посадку. Кроме того, при необходимости использования вспомогательной траектории следует также учитывать снижение высоты полета беспилотного летательного аппарата при перемещении по такой траектории.
В ходе операции 260 сформирована начальная траектория тромбонного захода на посадку. Начальная траектория тромбонного захода на посадку обычно аналогична траектории 100 тромбонного захода на посадку по фиг. 2А и 2В. Согласно раскрытому техническому решению траектория тромбонного захода на посадку содержит точку инициирования, участок полета до разворота, участок полета с U-образным разворотом, участок после разворота и точку приземления. Точка инициирования, желательная точка приземления (то есть, выбранная точка приземления), радиус разворота и пути до и после разворота или направления тромбонного захода на посадку уже известны или могут быть определены на данном этапе. Следовательно, траектория тромбонного захода на посадку может быть сформирована посредством определения точки разворота, в которой беспилотный летательный аппарат может выполнить разворот от пути до разворота для перехода к пути после разворота. Определение точки разворота определяет участок полета до разворота и участок после разворота траектории тромбонного захода на посадку. В соответствии с этим определена начальная точка разворота, причем точка разворота размещена вдоль пути до разворота и основана на определенной предполагаемой высоте полета беспилотного летательного аппарата, выполняющего планирующий спуск вдоль траектории тромбонного захода на посадку. Таким образом, начальная точка разворота определена и начальный тромбонный заход на посадку может быть сформирован в соответствии с этим. При отсутствии рассмотрения возможности планирующего спуска вдоль траектории ожидания (то есть, если операция 250 и способ по фиг. 3В не выполнены) операция 260 может быть внедрена в операцию 240 (определение основных данных о тромбонной траектории).
В ходе операции 270 беспилотному летательному аппарату предписано выполнить планирующий спуск к определенной точке инициирования и следовать по участку полета до разворота начальной траектории тромбонного захода на посадку. На фиг. 4 беспилотный летательный аппарат направлен к точке 530 инициирования траектории 510 тромбонного захода на посадку, которая представляет собой также точку выхода из траектории 500 ожидания. В качестве альтернативы операция 270 может быть выполнена перед операцией 260 посредством направления беспилотного летательного аппарата для выполнения планирующего спуска в точку инициирования и перемещения вдоль пути до разворота. Затем начальная траектория тромбонного захода на посадку может быть сформирована согласно операции 260.
В ходе операции 280 качество планирующего спуска беспилотного летательного аппарата определено посредством использования последовательности операций автоматического обучения. Во время планирующего спуска вдоль участка полета до разворота траектории тромбонного захода на посадку выполнено более сложное и точное определение текущего качества планирующего спуска беспилотного летательного аппарата. Более точное значение качества планирующего спуска обеспечивает большую точность при определении точки разворота и, следовательно, большую точность при приземлении (относительно выбранной точки приземления). Это определение выполнено при использовании последовательности операций автоматического обучения, которая итеративно вычисляет значение качества планирующего спуска вплоть до его схождения, по существу, к определенному значению (то есть, в пределах заранее определенной ошибки). Автоматическое обучение с получением качества планирующего спуска беспилотного летательного аппарата выполнено, по меньшей мере частично, эмпирическим образом. Например, автоматическое обучение выполнено посредством измерения пройденного расстояния и снижения высоты полета беспилотного летательного аппарата в течение определенного интервала времени. Эти измерения выполнены итерационным образом до получения определенного значения (то есть, в пределах заранее определенной ошибки). Выполняемые многократно вычисления и измерения могут быть выполнены с постоянными временными интервалами, например, один раз в секунду. Автоматическое обучение с получением качества планирующего спуска беспилотного летательного аппарата можно начать на более ранней стадии способа, но предпочтительно начать его при достижении беспилотным летательным аппаратом точки инициирования и начале перемещения по начальной траектории тромбонного захода на посадку. В ходе операции 260 предпочтительно определение начальной точки разворота таким образом, чтобы предоставить достаточное количество времени для автоматического обучения с получением качества планирующего спуска до достижения беспилотным летательным аппаратом начальной точки разворота. Увеличенная точность может быть достигнута на основании среднего значения определенной высоты полета над уровнем моря беспилотного летательного аппарата, выполняющего планирующий спуск вдоль каждого из участков траектории тромбонного захода на посадку (то есть, вдоль участка полета до разворота, участка полета с U-образным разворотом и участка после разворота). Поскольку высота полета над уровнем моря, с которой выполняет планирующий спуск беспилотный летательный аппарат, влияет на значение качества планирующего спуска (вследствие изменений температуры, плотности или давления воздуха), среднее значение определенной высоты полета над уровнем моря беспилотного летательного аппарата на каждом участке маршрута может быть использовано для регулирования определенного значения качества планирующего спуска для каждого участка маршрута.
В ходе операции 290 происходит многократное определение текущей точки разворота (то есть, множество точек разворота определено последовательно для каждого момента в течение заданного периода времени). Все точки разворота размещены вдоль пути до разворота и впереди относительно текущего местоположения беспилотного летательного аппарата. Местоположение каждой точки разворота вдоль пути до разворота может быть определено каждый раз относительно местоположения ранее определенной точки разворота. Критерием такого определения может быть расхождение между предполагаемой точкой приземления (то есть, определением фактической точки приземления посредством оценки), а именно, точкой приземления, которая была определена ранее, которая соответствует ранее определенной точке разворота, и выбранной точкой приземления. Таким образом, происходит многократное последовательное определение итерационным образом точек приземления и точек разворота, пока беспилотный летательный аппарат не достигает текущей точки разворота. Такой критерий может быть использован, поскольку существует взаимосвязь между местоположением точки разворота и местоположением (то есть, оценкой) его соответствующей точки приземления. Определение соответствующей точки приземления подробно описано в операции 300 ниже. В таком случае первая точка разворота определена относительно начальной точки разворота, которая определена в ходе операции 260. Определение точки разворота может быть выполнено с постоянными временными интервалами, например, один раз в секунду. Высота каждой точки разворота над уровнем моря вдоль пути до разворота определена на основе определенного качества планирующего спуска беспилотного летательного аппарата.
В ходе операции 300 происходит многократное определение соответствующей точки приземления для каждой определенной точки разворота. Определение соответствующей точки приземления может быть выполнено посредством оценки. Первая соответствующая точка приземления определена для начальной точки разворота (и согласована с ней), которая была определена в ходе операции 260. Каждая точка разворота определяет различную траекторию тромбонного захода на посадку, которая включает участок полета до разворота и участок после разворота с различными длинами. В соответствии с этим предположено, что каждая траектория тромбонного захода на посадку закончена в различной точке приземления. Каждая соответствующая точка приземления может быть оценена на основе предположения, что беспилотный летательный аппарат должен совершить разворот от пути до разворота для попадания на путь после разворота в соответствующей точке разворота. Оценка соответствующей точки приземления выполнена на основе определенного качества планирующего спуска.
Обратимся теперь к фиг. 5, на которой показан беспилотный летательный аппарат, обозначенный как 600, выполняющий планирующий спуск вдоль взятой в качестве примера траектории тромбонного захода на посадку, в целом обозначенной как 610. Траектория 610 тромбонного захода на посадку обычно аналогична траектории 100 тромбонного захода на посадку по фиг. 2А и 2В. Траектория 610 тромбонного захода на посадку содержит участок 630 полета до разворота, участок 640 полета с U-образным разворотом и участок 650 после разворота. Участок 630 полета до разворота вытянут горизонтально вдоль пути 690 до разворота, который по существу ориентирован против направления посадки. Участок 650 после разворота вытянут горизонтально вдоль пути 700 после разворота, который по существу ориентирован вдоль направления посадки. Выбранная точка 620 приземления размещена вдоль пути 700 после разворота. Путь 690 до разворота и путь 700 после разворота по существу параллельны друг другу. Текущие точки разворота А, В и С, размещенные вдоль пути 690 до разворота, обозначены как 670А, 670В и 670С, соответственно. Точка 670А разворота представляет собой начальную точку разворота. Каждая из точек 670А, 670В и 670С разворота определяет соответствующий участок полета до разворота вдоль пути 690 до разворота (не обозначены явно, поскольку они наложены друг на друга на участке 630), имеющего соответствующую длину. За каждым участком полета до разворота следует соответствующий участок 640А, 640В и 640С полета с U-образным разворотом, соответственно. Каждый участок 640А, 640В и 640С полета с U-образным разворотом обладает радиусом 660А, 660В и 660С разворота, соответственно. Радиусы 660А, 660 В и 660С разворота по существу равны заранее определенному радиусу разворота беспилотного летательного аппарата. За каждым участком 640А, 640В и 640С полета с U-образным разворотом следует соответствующий участок после разворота (не показан). Таким образом, операция определения точки разворота согласно раскрытому техническому решению однозначно определяет длину соответствующего участка полета до разворота и участка полета после разворота, и таким образом однозначно определяет длину траектории тромбонного захода на посадку, по которой следует беспилотный летательный аппарат. Начальная точка 670А разворота определяет начальную траекторию тромбонного захода на посадку (то есть, соединенную с участком 640А полета с U-образным разворотом и соответствующим участком после разворота). Точки 680А, 680В и 680С приземления представляют собой предполагаемые точки приземления, соответствующие точкам 670А, 670В и 670С разворота, соответственно. Начальная точка 670А разворота определена, например, так, чтобы обеспечивать возможность наличия достаточного времени для определения качества планирующего спуска беспилотного летательного аппарата 600 до прибытия беспилотного летательного аппарата 600 в начальную точку 670А разворота. Соответствующая точка 680А приземления оценена на основании полученного посредством автоматического обучения значения качества планирующего спуска или мгновенно определенного значения качества планирующего спуска, если операция автоматического обучения с получением качества планирующего спуска (операция 280) должна уже быть завершена. Определено расхождение между соответствующей точкой 680А приземления и выбранной точкой 620 приземления (обозначено как ΔDA). Точка 670В разворота определена относительно начальной точки 670А разворота с учетом расхождения ΔDA. Точка 680А приземления размещена на некотором расстоянии от выбранной точки 620 приземления вдоль пути 700 после разворота, указывая, что разворот в начальной точке 670А приземления был бы слишком ранним. Таким образом, другая точка 670В разворота определена итерационным образом с учетом расхождения ΔDA, которое было определено ранее. Точка 670В разворота размещена на некотором расстоянии от начальной точки 670А разворота вдоль пути 690 до разворота. После определения точки 670В разворота происходит оценка местоположения соответствующей точки 680В приземления и определение расхождения ΔDB между предполагаемой точкой 680В приземления и выбранной точкой 620 приземления. Как показано, точка 680В приземления все еще не совпадает с выбранной точкой 620 приземления вдоль пути 700 после разворота. Таким образом, происходит повторение этой операции и итеративное определение последующей точки 670С разворота с учетом расхождения ΔDB, которое было определено ранее. Точка 670С разворота не совпадает с начальной точкой 670В разворота вдоль пути до разворота 690. После определения точки 670С разворота происходит оценка местоположения соответствующей точки 680С приземления и определение расхождения ΔDC между предполагаемой точкой 680С приземления и выбранной точкой 620 приземления.
Как видно в примере, показанном на фиг. 5, недавно определенное расхождение ΔDC меньше ранее определенного расхождения ΔDB, которое, в свою очередь, меньше ранее определенного расхождения ΔDA. Повторяемая операция регулирования местоположения точки разворота (как разработано в ходе операции 290) должна вырабатывать сходимость определенной соответствующей точки приземления к выбранной точке приземления. Таким образом, каждая соответствующая точка приземления должна быть абсолютно ближе к выбранной точке приземления относительно точек приземления, соответствующих ранее определенным точкам разворота (позднее определенная точка приземления всегда определена с меньшим расхождением). Дополнительные критерии могут быть использованы для улучшения сходимости точки приземления, соответствующей определенной в данный момент точки разворота, к выбранной точке приземления. Например, могут быть определены точки разворота, связанные с точками посадки, размещенными в пределах заранее определенного диапазона вокруг выбранной точки приземления.
Последовательное определение точек приземления и точек разворота прекращено при достижении беспилотным летательным аппаратом 600 текущей точки разворота (которая представляет собой обновленную последней точку разворота). В ходе операции 310 беспилотному летательному аппарату предписано выполнить разворот после достижения беспилотным летательным аппаратом определенной в данный момент точки разворота (здесь, также «текущей» точки разворота) для перехода на путь после разворота. На фиг. 5 точка 670С представляет собой текущую точку разворота. Следовательно, после прохождения беспилотным летательным аппаратом 600 точки 670С разворота, связанной с предполагаемой точкой 680С приземления (и перед определением другой точки разворота), беспилотный летательный аппарат 600 направляют на выполнение разворота в направлении пути 700 после разворота для перемещения по нему. Беспилотный летательный аппарат 600 может пройти местоположение точки разворота при выполнении им планирующего спуска в пределах заранее определенного расстояния от точки разворота. В соответствии с этим беспилотный летательный аппарат 600 должен выполнить разворот вдоль соответствующего участка 640С полета с U-образным разворотом и перейти на путь 700 после разворота.
В ходе операции 320 беспилотному летательному аппарату предписано выполнять горизонтальное планирование вдоль пути после разворота до приземления. В частности, беспилотный летательный аппарат выполняет планирующий спуск вдоль участка после разворота траектории тромбонного захода на посадку к выбранной точке приземления. На фиг. 5 беспилотный летательный аппарат 600 следует вдоль пути 700 после разворота с образованием участка 650 после разворота. Беспилотный летательный аппарат 600 следует вдоль пути 700 после разворота для приземления в выбранной точке 620 приземления. На основании текущей точки разворота беспилотного летательного аппарата, то есть, точки 670С разворота, и определения соответствующей точки приземления (то есть, согласно операции 300), беспилотный летательный аппарат 600, как ожидают, совершит приземление в точке 680С приземления, достаточно близкой к выбранной точке 620 приземления. При обращении снова к фиг. 4 можно видеть, что точка разворота обозначена как промежуточная точка WP1T. Таким образом, траектория 510 тромбонного захода на посадку включает участок полета до разворота, вытянутый от промежуточной точки WP0T (то есть, от точки 530 выхода) к промежуточной точке WP1T, участок полета с U-образным разворотом, вытянутый отточки разворота (то есть, промежуточной точки WP1T) к промежуточной точке WP2T, и участок после разворота, вытянутый от промежуточной точки WP2T к выбранной точке 520 приземления. Следует иметь ввиду, что цель этого способа состоит в сходимости к точке приземления, которая по существу размещена в том же самом месте, как выбранная точка приземления, и таким образом, что беспилотный летательный аппарат должен по существу выполнить посадку в выбранной точке приземления, как показано на фиг. 4.
Операция выбора точки приземления (то есть, операция 200) может быть заменена операцией предоставления точки безопасного приземления. Предоставление точки безопасного приземления может быть выполнено согласно любому другому способу или любой другой системой, предназначенной для выбора точки приземления и известной в данной области техники. В качестве альтернативы удаленный оператор может предоставить такую точку приземления.
Способы по фиг. 3А и 3В могут быть выполнены, в частности, как часть программы для системы управления полетом беспилотного летательного аппарата. В качестве альтернативы способ может быть интегрирован с существующей программой системы управления полетом и системами полета на борту беспилотного летательного аппарата.
Требуемые параметры, такие как радиус разворота, воздушная скорость при развороте, минимальная высота полета над уровнем земли, минимальная высота полета ожидания или расстояние, на котором сформирован маршрут ожидания или инициировано решение о траектории ожидания (например, операция 250 по фиг. 3А), могут быть заранее определены и могут быть сохранены на борту беспилотного летательного аппарата или обеспечены удаленным оператором или системами.
Следует иметь ввиду, что выполнение планирующего спуска беспилотным летательным аппаратом контролируют предпочтительно для того, чтобы избегать отклонение от определенных траекторий вследствие ветров. Такой контроль может быть выполнен бортовыми системами полета.
Способ по фиг. 3А может дополнительно включать операции, относящиеся к приземлению и маневрированию по земле. Такие операции могут включать известные автоматические операции посадки, включая операции маневрирования по земле летательных аппаратов с двигателем, приспособленные для вынужденной посадки беспилотного летательного аппарата с неработающим двигателем. Такие операции могут быть начаты после снижения беспилотного летательного аппарата до заранее определенной высоты над выбранной точкой приземления или ниже этой высоты. Такие операции могут включить выравнивание, непосредственное управление подъемной силой, опознание на земле и маневрирование по земле, как известно в данной области техники.
На фиг. 6 схематически показана блок-схема размещения, в целом обозначенная как 800, бортовых систем полета беспилотного летательного аппарата, включая систему безопасной вынужденной посадки, построенную и действующую в соответствии с другим вариантом реализации настоящего изобретения. Блок-схема 800 содержит систему 810 безопасной вынужденной посадки, схему 820 навигационных приборов и различных датчиков, систему 830 управления полетом, базу 840 данных, топливный индикатор 850 и устройство 860 связи. Блок-схема 800 содержит датчики для непрерывного предоставления существенной информации, такой как информация о текущих навигации и местоположении, текущая информация об атмосферных условиях и указание на текущий уровень топлива. Система 810 вынужденной посадки содержит устройство 812 выработки траектории вынужденной посадки, средство 814 автоматического обучения с получением качества планирующего спуска и контроллер 816 круговой траектории. Схема 820 содержит глобальную систему 822 позиционирования (GPS), инерциальную навигационную систему 824, пневмометрическую трубку 826 и лазерный дальномер 828. Следует иметь ввиду, что могут быть использованы известные в данной области техники устройства или датчики, альтернативные к вышеупомянутым устройствам и датчикам. Система 810 вынужденной посадки может содержать блок обработки или блок памяти (не показаны). Блок обработки может быть соединен с устройством 812 выработки траектории вынужденной посадки.
Система 810 вынужденной посадки соединена со схемой 820, с системой 830 управления полетом, с базой 840 данных, с топливным индикатором 850 и с устройством 860 связи. Система 810 вынужденной посадки может быть соединена с бортовыми системами беспилотного летательного аппарата проводным или беспроводным способом. Система 810 вынужденной посадки может быть соединена с некоторыми из бортовых систем беспилотного летательного аппарата косвенным образом, то есть, посредством других систем, размещенных на борту беспилотного летательного аппарата. Например, система 810 вынужденной посадки может быть соединена со схемой 820 через систему 830 управления полетом. При таком подходе данные о навигации и обнаружении из схемы 820 поступают в систему 810 вынужденной посадки через систему 830 управления полетом. Беспилотный летательный аппарат может содержать систему управления (не показана), которая управляет различными системами на борту беспилотного летательного аппарата, используя централизованную архитектуру. В таком случае система 810 вынужденной посадки может быть соединена с такой системой управления и может иметь связь с другими бортовыми системами (всеми или некоторыми) через систему управления. Средство 814 автоматического обучения с получением качества планирующего спуска и контроллер 816 круговой траектории соединены с устройством 812 выработки траектории вынужденной посадки.
Управляющая станция 870 беспилотного летательного аппарата соединена с помощью беспроводных технологий с устройством 860 связи, чтобы сообщать беспилотному летательному аппарату направления или запрошенную информацию или контролировать полет и характеристики беспилотного летательного аппарата. Управляющая станция 870 беспилотного летательного аппарата может быть бортовой или размещена на земле. Связь между беспилотным летательным аппаратом и управляющей станцией может быть однонаправленной или двунаправленной. Следует иметь ввиду, что в соответствии с раскрытым техническим решением система может работать автономно и, следовательно, может быть установлена и работать на борту беспилотного летательного аппарата, который не обязательно содержит устройство связи и не обязательно связан с управляющей станцией.
Система 810 вынужденной посадки, устройство 812 выработки траектории вынужденной посадки или средство 814 автоматического обучения с получением качества планирующего спуска могут быть выполнены как доступное считыванию запоминающее устройство, содержащее выполнимый код программы или команды (например, выполнимые блоком обработки или блоком обработки, включенным в систему управления полетом беспилотного летательного аппарата). Система 810 вынужденной посадки может быть выполнена как часть системы управления полетом беспилотного летательного аппарата или может быть соединена с обычными системами управления полетом.
Работа системы 810 вынужденной посадки обычно аналогична способам (и согласована с ними), описанным в связи с фиг. 3А и 3В.
Система 810 вынужденной посадки может быть активизирована после события отказа двигателя или до этого, например, посредством многократного выбора безопасной вынужденной точки приземления или посредством многократного определения качества планирующего спуска беспилотного летательного аппарата, и во время всего полета. После события отказа двигателя или до этого устройство 812 выработки траектории вынужденной посадки выбирает точку приземления для безопасной вынужденной посадки беспилотного летательного аппарата. Выбор точки безопасного приземления может быть выполнен так же, как в операции 200 по фиг. 3А. База 840 данных может предоставить в устройство 812 выработки траектории вынужденной посадки необходимую информацию относительно возможных точек приземления при вынужденной посадке беспилотного летательного аппарата. В качестве альтернативы такая информация может быть подана в устройство 812 выработки траектории вынужденной посадки удаленным контролером удаленной базы данных или удаленных систем через устройство 860 связи. База 840 данных или, в качестве альтернативы, блок памяти системы 810 вынужденной посадки могут хранить значения заранее определенных параметров или любые другие данные, необходимые для работы системы 810 вынужденной посадки согласно раскрытому техническому решению.
Устройство 812 выработки траектории вынужденной посадки вырабатывает траекторию к выбранной точке приземления. Эта траектория сформирована способом, который может быть подобен операции 210 по фиг. 3А. Сформированная траектория включает информацию о горизонтальном направлении. Сформированная траектория подана в систему 830 управления полетом, которая предписывает беспилотному летательному аппарату выполнить планирующий спуск к выбранной точке приземления и вдоль сформированной траектории.
В качестве альтернативы выбор точки безопасного приземления или выработка траектории к выбранной точке приземления могут быть выполнены другими бортовыми системами и так, как известно в данной области техники. В таком случае выбранная точка приземления подана в устройство 812 выработки траектории вынужденной посадки.
После прибытия в окрестность выбранной точки приземления устройство 812 выработки траектории вынужденной посадки вырабатывает начальную траекторию тромбонного захода на посадку, аналогичную траектории 100 тромбонного захода на посадку по фиг. 2А и 2В. Выработка начальной траектории тромбонного захода на посадку может быть выполнена аналогично операциям 240 и 260 по фиг. 3А.
Устройство 812 выработки траектории вынужденной посадки может дополнительно вырабатывать траекторию ожидания. В таком случае устройство 812 выработки траектории вынужденной посадки проверяет возможность выполнения планирующего спуска вдоль траектории ожидания. Возможность ожидания может быть проверена согласно операции 250 по фиг. 3А. Устройство 812 выработки траектории вынужденной посадки предоставляет системе 830 управления полетом информацию о траектории ожидания, которая в свою очередь направляет беспилотный летательный аппарат для перехода на маршрут ожидания, выполнения планирующего спуска вдоль траектории и выхода в точке выхода из сформированной траектории ожидания. В случае многократного выполнения планирующего спуска вдоль маршрута ожидания устройство 816 выработки траектории может указывать системе 830 управления полетом на выход из маршрута ожидания. Заранее определенное значение высоты выхода может быть сохранено в базе 840 данных или в блоке памяти системы 810 и подано в устройство 812 выработки траектории. Траектория ожидания может быть сформирована согласно операции 230 и в соответствии со способом по фиг. 3В. В качестве альтернативы траектория ожидания может быть сформирована или планирование по маршруту ожидания может быть управляемо бортовыми системами беспилотного летательного аппарата, отличными от системы 810 вынужденной посадки и известными в данной области техники.
Контроллер 816 круговой траектории используется при необходимости и может быть использован при выработке и использовании системой 810 безопасной вынужденной посадки круговых траекторий, включая траектории, образующие часть круга (например, полукруглые), или частично круговых траекторий (то есть, включающих сегменты, которые представляют собой части круга). Контроллер 816 круговой траектории активизирует определенный жесткий контроль, обеспечивающей беспилотному летательному аппарату возможность следовать по круговой траекторией сравнительно точным образом.
Информация относительно сформированной начальной траектории тромбонного захода на посадку подана в систему 830 управления полетом, которая предписывает беспилотному летательному аппарату выполнить планирующий спуск к точке инициирования и следовать вдоль сформированной начальной траектории.
Средство 814 автоматического обучения с получением качества планирующего спуска многократно определяет качество планирующего спуска беспилотного летательного аппарата и может определять его с различной степенью точности. Средство 814 автоматического обучения с получением качества планирующего спуска непрерывно подает мгновенно определяемое значение качества планирующего спуска в устройство 812 выработки траектории. Устройство 812 выработки траектории непрерывно определяет предполагаемую высоту полета беспилотного летательного аппарата (например, над возможной или выбранной точкой приземления) на основании определенного в данный момент значения качества планирующего спуска, полученного средством 814 автоматического обучения.
Средство 814 автоматического обучения с получением качества планирующего спуска непрерывно получает информацию о местоположении (то есть, включая высоту над уровнем моря), ориентации, воздушной скорости и путевой скорости беспилотного летательного аппарата на основании данных о местоположении и навигационных данных, непрерывно обеспечиваемых глобальной системой 822 позиционирования и инерциальной навигационной системой 824, и данных о давлении воздуха, непрерывно обеспечиваемых пневмометрической трубкой 826 из схемы 820. Топливный индикатор 850 может непрерывно подавать данные о текущем уровне топлива в средство 814 автоматического обучения. Данные о массе нетто (то есть, исключая массу топлива) беспилотного летательного аппарата могут быть поданы в средство 814 автоматического обучения из базы 840 данных или из блока памяти системы 810 безопасной вынужденной посадки. Текущее значение суммарного веса беспилотного летательного аппарата может быть непрерывно определено средством 814 автоматического обучения или, в качестве альтернативы, может быть непрерывно подано в средство 814 автоматического обучения бортовыми системами беспилотного летательного аппарата, отличными от системы 810 вынужденной посадки. Информация о направлении и скорости ветра может быть непрерывно определена средством 814 автоматического обучения на основании текущей информации о воздушной скорости и путевой скорости или может быть непрерывно подана в средство 814 автоматического обучения бортовыми системами беспилотного летательного аппарата, отличными от системы 810 вынужденной посадки (например, системой 830 управления полетом). Схема 820 может включить альтернативные или дополнительные системы или устройства измерения и обнаружения для обеспечения необходимых измерений или информацию, необходимую согласно раскрытому техническому решению.
Средство 814 автоматического обучения с получением качества планирующего спуска может определить качество планирующего спуска образом, описанным в связи с операцией 220 по фиг. 3А, которая менее точна в сравнении с раскрытым техническим решением. Средство 814 автоматического обучения может проводить автоматическое обучение с получением определенного и текущего значений качества планирующего спуска беспилотного летательного аппарата при использовании итерационной последовательностью, описанной в связи с операцией 280 по фиг. 3А. Измерительные системы, включенные в схему 820 беспилотного летательного аппарата, такие как глобальная система 822 позиционирования и инерциальная навигационная система 824, могут непрерывно обеспечивать средство 814 автоматического обучения результатами эмпирических измерений расстояния, пройденного вперед при выполнении планирующего спуска, и потери высоты за временной интервал. Автоматическое обучение с получением точного значения качества планирующего спуска беспилотного летательного аппарата предпочтительно выполнено во время планирующего спуска беспилотного летательного аппарата вдоль участка полета до разворота и предпочтительно инициировано после начала перемещения беспилотного летательного аппарата вдоль начальной траектории тромбонного захода на посадку.
Устройство 812 выработки траектории вынужденной посадки определяет местоположение точки приземления, соответствующей начальной точке разворота беспилотного летательного аппарата. Устройство 812 выработки траектории затем определяет абсолютное расхождение между определенной соответствующей точкой приземления и выбранной точкой приземления. Устройство 812 выработки траектории затем регулирует местоположение начальной точки разворота согласно вышеупомянутому определенному расхождению (операции 290, 300 по фиг. 3А и их описание в связи с фиг. 5). Таким образом, определено, что другая точка представляет собой текущую точку разворота. Устройство 812 выработки траектории многократно регулирует тем же самым способом местоположение точки разворота. Таким образом, происходит многократное и последовательное определение точек поворота и при этом определенные соответствующие точки приземления сходятся к выбранной точке приземления. Повторный выбор точки разворота аналогичен операциям 290-300 по фиг. 3А.
После прохождения беспилотным летательным аппаратом текущей точки разворота устройство 812 выработки траектории указывает системе 830 управления полетом выполнить разворот беспилотного летательного аппарата к выбранной точке приземления и следовать вдоль участка после разворота. Посредством определения фактической точки разворота беспилотного летательного аппарата и, таким образом, определения участка полета с U-образным разворотом и участка после разворота, устройство 812 выработки траектории определяет (и завершает выработку) траекторию тромбонного захода на посадку, вдоль которой необходимо следовать для выполнения посадки по существу в выбранной точке приземления. Система 830 управления полетом затем направляет беспилотный летательный аппарат для выполнения разворота в выбранной точке разворота и следования вдоль участка после разворота до приземления и согласно информации, предоставленной устройством 812 выработки траектории из системы 810 вынужденной посадки.
Устройство 860 связи может предоставить системе 810 вынужденной посадки необходимую информацию или указания от удаленного оператора или удаленных систем, размещенных, например, в управляющей станции 870 беспилотного летательного аппарата. Устройство 860 связи может также быть использовано для управления вынужденной посадкой и характеристиками беспилотного летательного аппарата и для вмешательства посредством предоставления указаний, включая самые важные указания, системе 810 безопасной вынужденной посадки или системе 830 управления полетом в конкретных ситуациях.
Беспилотный летательный аппарат может дополнительно выполнять операции автоматической посадки и маневрирования по земле летательных аппаратов с двигателем, таких как выравнивание, непосредственное управление подъемной силой, опознание на земле и маневрирование по земле. При использовании таких операций лазерный дальномер 828 (отмеченный как LRF) или любое другое альтернативное устройство для измерения расстояния может непрерывно указывать расстояние от беспилотного летательного аппарата до земли при выполнении беспилотным летательным аппаратом планирующего спуска вдоль участка после разворота траектории тромбонного захода на посадку согласно раскрытому техническому решению и по направлению к точке приземления. При снижении беспилотного летательного аппарата до заранее определенной высоты полета над землей или ниже могут быть начаты операции автоматической посадки.
Система 810 безопасной вынужденной посадки может содержать дополнительные обеспечивающие возможность выполнения таких операций компоненты, как наземная логическая система и система управления движением по земле. В качестве альтернативы система 810 безопасной вынужденной посадки может использовать такие системы на борту беспилотного летательного аппарата, посредством подстраивания их работы к сценарию вынужденной посадки согласно раскрытому техническому решению.
Система или способ согласно раскрытому техническому решению могут быть интегрированы с беспилотным летательным аппаратом, работающим в автономном режиме, работающим в полуавтономном режиме или управляемым удаленно. Термин «полуавтономный» при использовании здесь относится к беспилотному летательному аппарату, который может быть поддержан системами или оператором, размещенными удаленно, и которые предоставляют беспилотному летательному аппарату конкретную информацию или могут взять под свое управление работу беспилотного летательного аппарата в конкретных ситуациях.
Способам и системам описанной технические решения могут содействовать различные системы, такие как системы предотвращения столкновений и цифровые карты (например, цифровые модели ландшафта или модели возвышения), при выборе точки приземления, выработке траекторий или планирующего спуска, известные в данной области техники. Такие системы и карты могут быть размещены удаленно (например, на станциях наземного управления) или на борту беспилотного летательного аппарата.
Специалистам в данной области техники очевидно, что описанное техническое решение не ограничено тем, что было, в частности, показано и описано выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат и способ безопасной посадки беспилотного летательного аппарата | 2016 |
|
RU2712716C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВАРИЙНЫХ УСЛОВИЯХ | 2019 |
|
RU2725640C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2703412C2 |
| СПОСОБ ПОМОЩИ В НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2523183C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2666479C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ, В ТОМ ЧИСЛЕ БЕСПИЛОТНОГО | 2015 |
|
RU2585197C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| Информационно-измерительная и управляющая система посадки группы беспилотных летательных аппаратов на посадочную платформу | 2022 |
|
RU2784221C1 |
| СПОСОБ ВОЗДЕЙСТВИЯ С ВОЗДУХА НА ЛЕСНЫЕ ПОЖАРЫ, ВРЕДНЫХ НАСЕКОМЫХ И АТМОСФЕРНЫЕ ЯВЛЕНИЯ | 2006 |
|
RU2378159C2 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
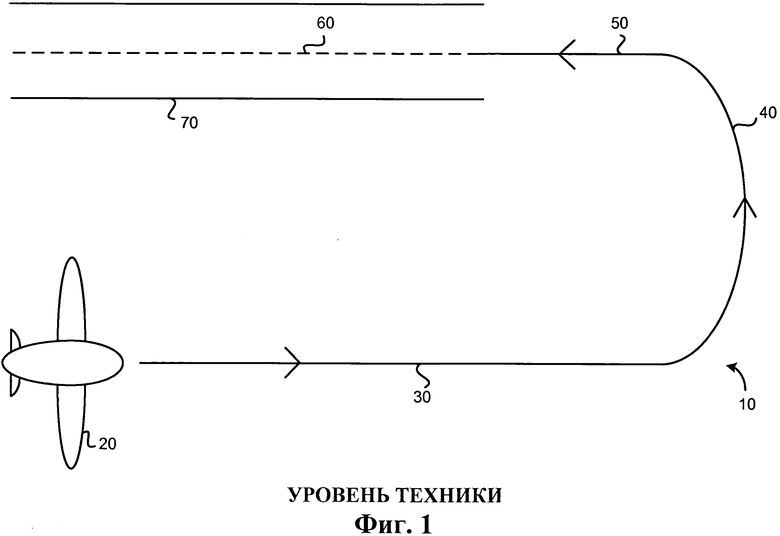
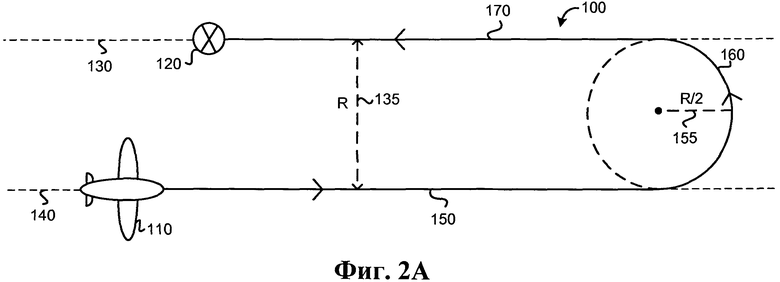
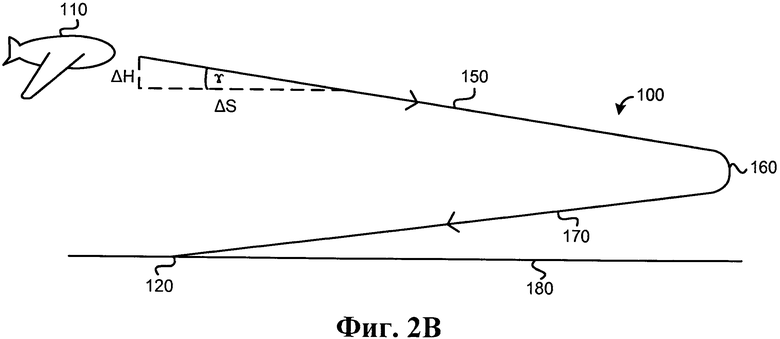

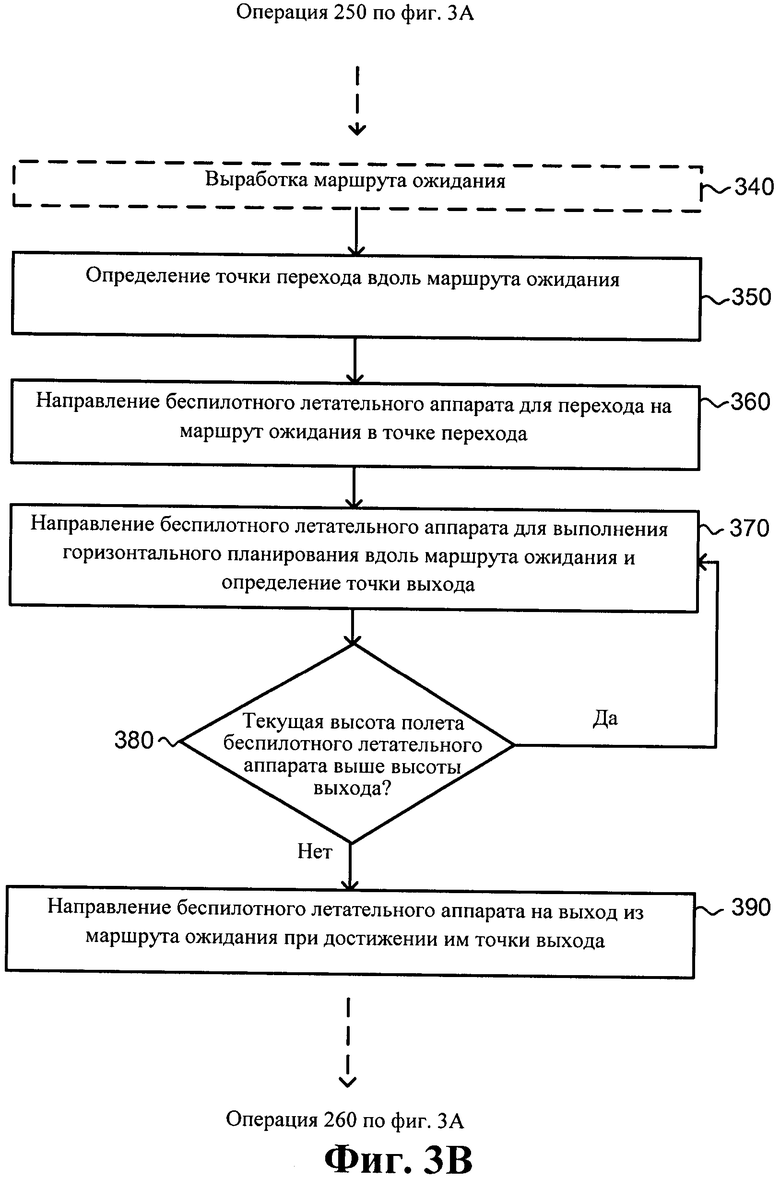
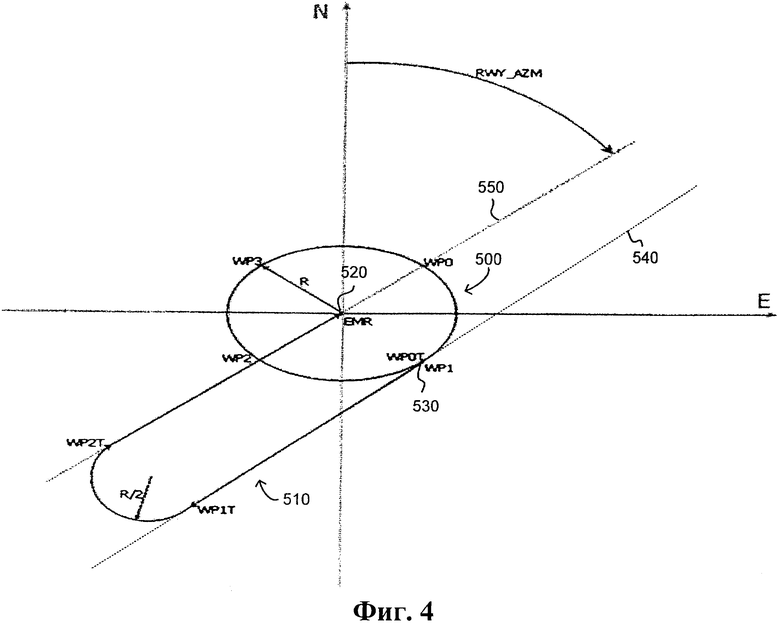
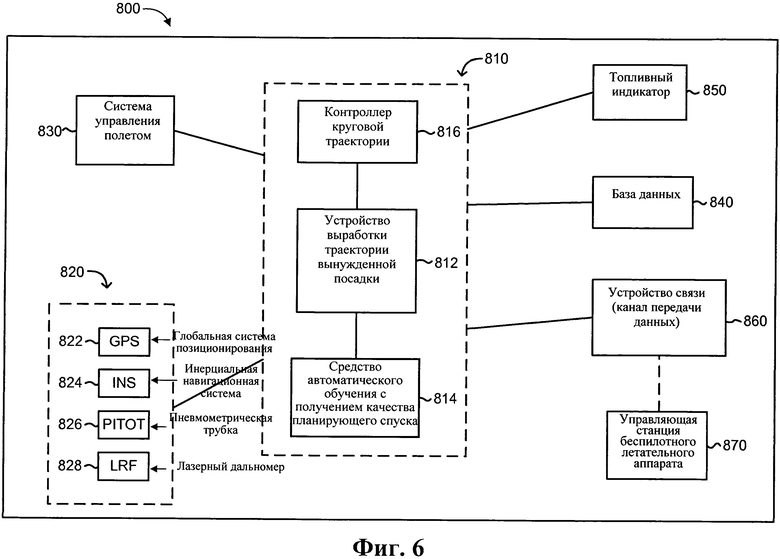
Группа изобретений относится к беспилотному летательному аппарату (БПЛА), содержащему систему безопасной вынужденной посадки, которая реализует способ безопасной вынужденной посадки при отказе двигателя. При способе безопасной вынужденной посадки БПЛА формируют круговую траекторию захода на посадку, содержащую участки полета до и после разворота, направляют БПЛА в определенную точку начала траектории до разворота после выработки траектории ожидания и точек перехода вдоль маршрута ожидания и точки выхода из нее, на основании величины качества планирующего спуска, посредством итеративного определения этой величины до сходимости к определенному значению, многократно определяют точку разворота, точку приземления и расхождение между точкой приземления, определенной ранее, в соответствии с ранее определенной точкой разворота, и указанной выбранной точкой приземления. После разворота направляют БПЛА по траектории захода на посадку в соответствии с выбранной точкой приземления. Обеспечивается безопасная вынужденная посадка БПЛА в выбранной точке приземления при отказе двигателя. 3 н.п. и 21 з.п. ф-лы, 8 ил.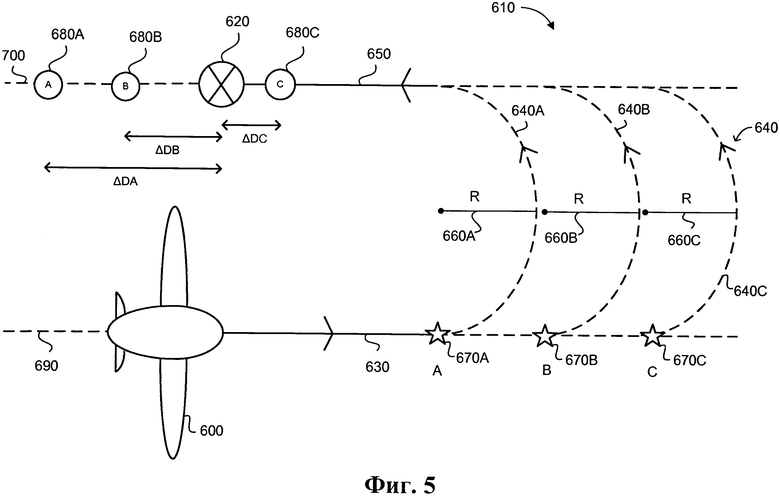
1. Способ автономной безопасной вынужденной посадки беспилотного летательного аппарата с двигателем в случае отказа двигателя, согласно которому
формируют траекторию захода на посадку, содержащую
участок полета до разворота с началом в точке инициирования указанной траектории,
участок полета после разворота с завершением в выбранной точке приземления, и
участок полета с U-образным разворотом, размещенный между участком полета до разворота и участком полета после разворота,
направляют указанный беспилотный летательный аппарат в указанную точку инициирования для следования вдоль указанного участка полета до разворота указанной траектории захода на посадку,
многократно определяют значения качества планирующего спуска указанного беспилотного летательного аппарата на основании текущих условий полета указанного беспилотного летательного аппарата,
многократно определяют текущую точку разворота вдоль указанного участка полета до разворота для посадки указанного беспилотного летательного аппарата в указанной выбранной точке приземления, причем
участок полета с U-образным разворотом инициируют в указанной текущей точке разворота, а определение указанной текущей точки разворота основано на определенном значении качества планирующего спуска и выполняется каждый раз относительно определенной ранее течки разворота,
многократно определяют точку приземления, соответствующую указанной текущей точке разворота, на основании указанного определенного значения качества планирующего спуска, причем указанный этап определения текущей точки разворота выполняют с учетом расхождения между
(i) точкой приземления, определенной ранее в соответствии с ранее определенной точкой разворота, и
(ii) указанной выбранной точкой приземления, и при достижении указанным беспилотным летательным аппаратом указанной текущей точки разворота, направления указанного беспилотного летательного аппарата для следования по указанному участку маршрута полета с U-образным разворотом и по указанному участку после разворота указанной траектории захода на посадку с целью посадки указанного беспилотного летательного аппарата в указанной выбранной точке приземления.
2. Способ по п. 1, в котором
указанный участок полета до разворота проходит вдоль пути до разворота, а
указанный участок после разворота проходит вдоль пути после разворота, который по существу параллелен указанному пути до разворота, причем
указанный путь после разворота проходит вдоль взлетно-посадочной полосы, на которой размещена указанная выбранная точка приземления.
3. Способ по п. 1, дополнительно включающий этапы
выбора выбираемой точки приземления, причем
определенная предполагаемая высота полета указанного беспилотного летательного аппарата над выбранной указанной точкой приземления достаточна для обеспечения указанному беспилотному летательному аппарату возможности выполнения указанной безопасной вынужденной посадки в указанной выбранной точке приземления, и
указанная предполагаемая высота полета определена на основании указанного определенного значения качества планирующего спуска, и
направления указанного беспилотного летательного аппарата для выполнения планирующего спуска к указанной выбранной точке приземления при указанном отказе двигателя.
4. Способ по п. 3, в котором
указанная выбранная точка приземления выбрана из базы данных, содержащей набор сведений относительно множества точек приземления при вынужденной посадке, причем эти сведения содержат информацию о
направлении взлетно-посадочной полосы, на которой размещена соответствующая точка приземления, и
географическом положении соответствующей точки приземления.
5. Способ по п. 1, дополнительно включающий этапы
определения предполагаемой высоты полета указанного беспилотного летательного аппарата над указанной выбранной точкой приземления на основе указанного определенного значения качества планирующего спуска,
определения возможности планирующего спуска вдоль траектории ожидания на основе того, превышает ли предполагаемая высота полета указанного беспилотного летательного аппарата минимальную высоту, заранее указанную для обеспечения возможности указанной безопасной вынужденной посадки в указанной выбранной точке приземления, и
направления указанного беспилотного летательного аппарата для выполнения планирующего спуска вдоль указанной траектории ожидания, если он определен как возможный.
6. Способ по п. 5, дополнительно включающий этап
выработки указанной траектории ожидания, включающей подэтапы
выработки маршрута ожидания, размещенного над областью, находящейся вблизи указанной выбранной точки приземления,
определения точки перехода вдоль указанного маршрута ожидания,
определения точки выхода вдоль указанного маршрута ожидания, из которой указанный беспилотный летательный аппарат может начать следовать вдоль указанной траектории захода на посадку,
направления указанного беспилотного летательного аппарата для перехода на указанный маршрут ожидания в указанной точке перехода,
направления указанного беспилотного летательного аппарата для выполнения планирующего спуска вдоль указанного маршрута ожидания и
направления указанного беспилотного летательного аппарата для выхода из указанного маршрута ожидания в указанной точке выхода.
7. Способ по п. 6, в котором
указанный маршрут ожидания является круговым.
8. Способ по п. 6, в котором
указанный беспилотный летательный аппарат направлен на выход из указанного маршрута ожидания после снижения указанного беспилотного летательного аппарата ниже заранее определенной выходной высоты полета, являющейся высотой полета указанного беспилотного летательного аппарата, достаточной для выполнения указанной безопасной вынужденной посадки в указанной выбранной точке приземления.
9. Способ по п. 6, в котором
указанная траектория ожидания касательна к указанному участку полета до разворота указанной траектории захода на посадку,
причем точка выхода из указанной траектории ожидания и точка инициирования указанной траектории захода на посадку определены как размещенные в точке соприкосновения указанной траектории ожидания и указанного участка полета до разворота.
10. Способ по п. 1, дополнительно включающий
этап непрерывного измерения указанных текущих условий полета посредством датчиков, размещенных на борту указанного беспилотного летательного аппарата, причем
указанные условия полета выбраны из списка, состоящего из
информации о местоположении и навигационных данных указанного беспилотного летательного аппарата,
уровня топлива на борту указанного беспилотного летательного аппарата и
атмосферных условий вблизи указанного беспилотного летательного аппарата.
11. Способ по п. 1, в котором
указанный этап многократного определения качества планирующего спуска указанного беспилотного летательного аппарата включает автоматическое обучение с получением величины качества планирующего спуска посредством итеративного определения указанного значения качества планирующего спуска до его сходимости к определенному значению, причем
указанное автоматическое обучение, по меньшей мере частично, является эмпирическим.
12. Способ по п. 11, в котором
инициация указанного автоматического обучения происходит после начала следования указанного беспилотного летательного аппарата вдоль указанной траектории захода на посадку.
13. Способ по п. 1, в котором
указанный беспилотный летательный аппарат работает автономно.
14. Способ по п. 1, в котором
указанный участок полета с U-образным разворотом выполнен полукруглым.
15. Беспилотный летательный аппарат с двигателем, выполненный с возможностью автономной безопасной вынужденной посадки в случае отказа двигателя и содержащий
систему управления полетом, предназначенную для управления полетом беспилотного летательного аппарата, причем
указанная система управления полетом содержит блок обработки,
систему безопасной вынужденной посадки, соединенную с указанной системой управления полетом, причем
указанная система безопасной вынужденной посадки содержит запоминающее устройство, пригодное для считывания указанным блоком обработки указанной системы управления полетом, практически осуществляющее программу с командами, выполняемую указанным блоком обработки, для выполнения этапов способа безопасной вынужденной посадки указанного беспилотного воздушного аппарата в случае отказа двигателя, причем этапы способа включают
формирование траектории захода на посадку, содержащей
участок полета до разворота, имеющий начало в точке инициирования указанной траектории,
участок после разворота, имеющий конец в выбранной точке приземления, и
участок полета с U-образным разворотом, размещенный между указанным участком полета до разворота и указанным участком после разворота,
подачу указанной траектории захода на посадку в указанную систему управления полетом для направления указанного беспилотного летательного аппарата в указанную точку инициирования для следования по указанному участку полета до разворота,
многократное определение качества планирующего спуска указанного беспилотного летательного аппарата на основе текущих условий полета указанного беспилотного летательного аппарата,
многократное определение текущей точки разворота вдоль указанного участка полета до разворота для выполнения посадки указанного беспилотного летательного аппарата в указанной выбранной точке приземления, причем
участок полета с U-образным разворотом инициируют в текущей точке разворота, а определение указанной текущей точки разворота основано на определенном значении качества планирующего спуска и выполняется каждый раз относительно определенной ранее точки разворота,
многократное определение точки приземления, соответствующей указанной текущей точке разворота, на основании указанного определенного значения качества планирующего спуска, причем
указанный этап определения текущей точки разворота выполнен с учетом расхождения между
(i) точкой приземления, определенной ранее в соответствии с ранее определенной точкой разворота, и
(ii) указанной выбранной точкой приземления,
многократную подачу указанной текущей точки разворота в указанную систему управления полетом для направления указанного беспилотного летательного аппарата посредством планирующего спуска к указанной текущей точке разворота, и
при достижении указанным беспилотным летательным аппаратом указанной текущей точки разворота предписание указанной системе управления полетом направить указанный беспилотный летательный аппарат для следования по указанному участку маршрута полета с U-образным разворотом и по указанному участку после разворота указанной траектории захода на посадку с целью выполнения посадки указанного беспилотного летательного аппарата в указанной точке приземления.
16. Беспилотный летательный аппарат по п. 15, в котором
указанные условия полета выбраны из списка, состоящего из
информации о местоположении и навигации указанного беспилотного летательного аппарата,
уровня топлива на борту указанного беспилотного летательного аппарата, и атмосферных условий вблизи указанного беспилотного летательного аппарата.
17. Беспилотный летательный аппарат по п. 16, дополнительно содержащий по меньшей мере один
датчик, выбранный из списка, состоящего из:
датчика для непрерывной подачи информации об указанных местоположении и навигации,
датчика для непрерывного измерения указанного уровня топлива, датчика для непрерывной подачи указанной информации о состоянии атмосферы.
18. Беспилотный летательный аппарат по п. 15, в котором
указанный участок полета до разворота проходит вдоль пути до разворота, а
указанный участок после разворота проходит вдоль пути после разворота, который по существу параллелен указанному пути до разворота, причем
указанный путь после разворота проходит вдоль взлетно-посадочной полосы, на которой размещена указанная выбранная точка приземления.
19. Беспилотный летательный аппарат по п. 15, в котором
указанная система безопасной вынужденной посадки внедрена в указанную систему управления полетом.
20. Беспилотный летательный аппарат по п. 15, дополнительно содержащий
базу данных, содержащую набор точек приземления для вынужденной посадки указанного беспилотного летательного аппарата, причем
указанная программа с командами для указанной системы безопасной вынужденной посадки представляет собой программу, пригодную для дальнейшего выполнения этапа способа по выбору указанной определенной точки приземления из указанного набора точек приземления, причем
определенная предполагаемая высота полета указанного беспилотного летательного аппарата над указанной выбранной точкой приземления достаточна, чтобы обеспечить указанному беспилотному летательному аппарату возможность выполнения указанной безопасной вынужденной посадки в указанной выбранной точке приземления, и
указанная предполагаемая высота полета определена на основании указанного определенного значения качества планирующего спуска.
21. Беспилотный летательный аппарат по п. 15, в котором
программа с командами для системы безопасной вынужденной посадки представляет собой программу, пригодную для дальнейшего выполнения следующих этапов способа:
определение предполагаемой высоты полета указанного беспилотного летательного аппарата над указанной выбранной точкой приземления на основании указанного определенного значения качества планирующего спуска,
определение возможности выполнения планирующего спуска вдоль траектории ожидания, основанное на том, превышает ли предполагаемая высота полета указанного беспилотного летательного аппарата минимальную высоту, заранее указанную, как обеспечивающую возможность указанной безопасной вынужденной посадки в указанной выбранной точке приземления, и
предписание указанной системе управления полетом направить указанный беспилотный летательный аппарат для выполнения планирующего спуска вдоль указанной траектории ожидания при ее возможности.
22 Беспилотный летательный аппарат по п. 21, в котором
указанная программа с командами для указанной системы безопасной вынужденной посадки пригодна для последующего выполнения следующих этапов способа:
формирование указанной траектории ожидания, включающее следующие подэтапы;
формирование маршрута ожидания, размещенного над областью, находящейся вблизи указанной выбранной точки приземления,
определение точки перехода вдоль указанного маршрута ожидания, и
определение точки выхода вдоль указанного маршрута ожидания, из которой указанный беспилотный летательный аппарат может начать следовать вдоль указанной траектории захода на посадку,
подача сформированной траектории ожидания в указанную систему управления полетом для направления указанного беспилотного летательного аппарата с целью перехода на указанный маршрут ожидания в указанной точке перехода, выполнения планирующего спуска вдоль указанного маршрута ожидания и выхода из указанного маршрута ожидания в указанной точке выхода.
23. Беспилотный летательный аппарат по п. 15, в котором
указанный этап по многократному определению качества планирующего спуска указанного беспилотного летательного аппарата включает автоматическое обучение с получением величины качества планирующего спуска посредством итерационного определения указанного значения качества планирующего спуска до его сходимости к определенному значению, причем
указанное автоматическое обучение, по меньшей мере частично, является эмпирическим.
24. Система для установки на беспилотном летательном аппарате с двигателем, обеспечивающая возможность безопасной вынужденной посадки указанного беспилотного летательного аппарата в случае отказа двигателя, соединенная с системой управления полетом указанного беспилотного летательного аппарата и содержащая
запоминающее устройство, пригодное для считывания блоком обработки указанной системы управления полетом, практически осуществляющее программу с командами, выполняемую блоком обработки, для выполнения следующих этапов способа:
формирования траектории захода на посадку, содержащей
участок полета до разворота, имеющий начало в точке инициирования указанной траектории,
участок после разворота, имеющий конец в выбранной точке приземления, и
участок полета с U-образным разворотом, размещенный между указанным участком полета до разворота и указанным участком после разворота,
подачи указанной траектории захода на посадку в указанную систему управления полетом для направления указанного беспилотного летательного аппарата в указанную точку инициирования для следования по указанному участку полета до разворота,
многократного определения качества планирующего спуска указанного беспилотного летательного аппарата, основанного на текущих условиях полета указанного беспилотного летательного аппарата,
многократного определения текущей точки разворота вдоль указанного участка полета до разворота для выполнения посадки указанного беспилотного летательного аппарата в указанной выбранной точке приземления, причем указанный участок полета с U-образным разворотом инициируют в указанной текущей точке разворота, а определение указанной текущей точки разворота основано на указанном определенном значении качества планирующего спуска и выполняется каждый раз относительно определенной ранее точки разворота,
многократного определения точки приземления, соответствующей указанной текущей точке разворота, на основании указанного определенного значения качества планирующего спуска, причем
указанный этап определения текущей точки разворота выполняют с учетом расхождения между
(i) точкой приземления, определенной ранее в соответствии с ранее определенной точкой разворота, и
(ii) указанной выбранной точкой приземления, и
многократной подачи указанной текущей точки разворота в указанную систему управления полетом для предписания указанному беспилотному летательному аппарату выполнить планирующий спуск к указанной текущей точке разворота, и
и при достижении указанным беспилотным летательным аппаратом указанной текущей точки разворота предписания указанной системе управления полетом направить указанный беспилотный летательный аппарат для следования по указанному участку маршрута полета с U-образным разворотом и по указанному участку после разворота траектории захода на посадку для выполнения посадки указанного беспилотного летательного аппарата в указанной выбранной точке приземления.
| ENG, PILLAR C.S., MEJIAS, LUIS, WALKER, RODNEY A., FITZGERALD, DANIEL L., SIMULATION OF A FIXED-WING UAV FORCED LANDING WITH DINAMIC PATH PLANNING | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| RU 2002132246 A, 10.06.2004 | |||
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| EP 1847896 A1, 24.10.2007 | |||
| CN 101944295 A, 12.01.2011 | |||
| WO 2008130453 A2, 30.01.2008. | |||

