Общая область техники
Изобретение относится к области управления летательным аппаратом.
В частности, его объектом является способ автоматического направления летательного аппарата, такого как беспилотный аппарат, из места, удаленного от аэропорта, до посадки летательного аппарата на взлетно-посадочную полосу аэропорта.
Уровень техники
Существующие системы направления беспилотных аппаратов обеспечивают автономное управление полетом беспилотного аппарата вдоль заданной траектории, соответствующей, например, маршруту воздушного наблюдения. Для осуществления такого управления через равномерные интервалы времени определяют место летательного аппарата, которое сравнивают с заданной траекторией следования. Как правило, это место определяют при помощи приемника спутниковой системы абсолютного позиционирования, такой как системы GPS или Galileo, называемые системами GNSS (“Global Navigation Satellite System”).
Однако иногда вычислительное устройство летательного аппарата оказывается не в состоянии определить текущее место летательного аппарата либо по причине неисправности компонента летательного аппарата, такого как приемник GNSS, либо по причине отсутствия сигнала системы позиционирования, например, в случае действующих на сигнал помех. Не зная место летательного аппарата, его вычислительное устройство не может направлять летательный аппарат по заданной траектории. При этом система управления летательного аппарата оказывается не в состоянии привести его в точку посадки, такую как взлетно-посадочная полоса аэропорта или временного аэродрома. Летательный аппарат может упасть в неизвестном месте и может быть потерян.
В связи с этим существует потребность в способе управления, позволяющем надежно и автономно направлять летательный аппарат из удаленной точки возвращения до взлетно-посадочной полосы и посадить летательный аппарат на эту полосу, несмотря на невозможность позиционирования при помощи спутниковой системы, и одновременно позволяющем свести к минимуму работу оператора беспилотного аппарата и даже отказаться от его участия.
В документе US 4454510 описан способ обеспечения автоматической посадки летательного аппарата на взлетно-посадочную полосу от заданной точки, для которой определяют расстояние и высоту полета летательного аппарата, до точки приземления. Способ предполагает использование альтиметра и индикатора отклонения курса, выполненного с возможностью измерения отклонения азимута летательного аппарата относительно определенного направления магнитного Севера. Кроме того, он содержит фазу обеспечения посадки. Следовательно, в рамках способа необходимо производить геолокализацию летательного аппарата и определять высоту его полета, устанавливая на предварительном этапе положение магнитного Севера и положение взлетно-посадочной полосы, что является сложным и требует калибровки системы обеспечения.
В документе US 2009/055038 предложен аналогичный способ, использующий в качестве контрольной оси для измерения отклонения азимута направление взлетно-посадочной полосы. В данном случае способ тоже требует геолокализации летательного аппарата и определения высоты его полета, а также осуществления этапа калибровки системы обеспечения.
Наконец, в документе GB 2302318 описан способ управления при посадке беспилотного аппарата, включающий в себя определение расположения летательного аппарата на уровне заранее определенных указателей и направление летательного аппарата от заданной точки до точки захода на посадку на основании данных высоты полета, вычисленных при помощи системы анализа изображения, и данных курса летательного аппарата.
Раскрытие изобретения
Первым объектом настоящего изобретения является способ обеспечения автоматической посадки летательного аппарата на взлетно-посадочную полосу из точки возвращения до точки приземления, на уровне которой летательный аппарат входит в контакт с взлетно-посадочной полосой, при этом указанный способ осуществляют при помощи бортового устройства обработки данных указанного летательного аппарата, которое выполнено с возможностью соединения с:
- альтиметром, выполненным с возможностью измерять высоту полета летательного аппарата,
- индикатором отклонения курса, расположенным на уровне наземной станции и выполненным с возможностью измерять относительно контрольной точки отклонение азимута летательного аппарата относительно контрольного направления, соединяющего указанную точку возвращения и место индикатора отклонения курса,
при этом указанный способ отличается тем, что содержит:
- фазу обеспечения обратной навигации, включающую в себя:
- вождение летательного аппарата, - на основании измерений отклонения азимута летательного аппарата относительно указанного контрольного направления, передаваемых индикатором отклонения курса, - из точки возвращения в направлении места индикатора отклонения курса;
- определение места летательного аппарата в заранее определенной точке захвата, приблизительно находящейся на одной линии с точкой возвращения и с местом индикатора отклонения курса;
- вождение летательного аппарата вдоль заранее определенной траектории от точки захвата до заранее определенной точки захода на посадку, приблизительно находящейся на одной линии с осью взлетно-посадочной полосы, на основании данных высоты полета, выдаваемых альтиметром, и данных курса и скорости летательного аппарата;
- фазу обеспечения посадки, включающую в себя вождение от точки захода на посадку до точки приземления, находящейся на взлетно-посадочной полосе.
Под точкой возвращения в данном случае следует понимать точку, начиная от которой система обеспечения посадки обнаруживает летательный аппарат. Следует отметить, что в рамках изобретения эту точку возвращения определяют, не зная ее места (высоты, расстояния и т.д.), и применяют только для определения контрольного направления, которое используют для вождения летательного аппарата в ходе фазы обеспечения обратной навигации.
Таким образом, летательный аппарат можно привести в место захвата, известное на основании измерений отклонения азимута, выдаваемых индикатором отклонения курса, затем вести его из этого места до точки приземления, не прибегая к использованию мощного инерциального счетчика текущих координат, установленного на летательном аппарате.
Место летательного аппарата в точке захвата можно определить на основании данных расстояния между летательным аппаратом и контрольной точкой на земле, находящейся на одной линии с точкой возвращения и с местом индикатора отклонения курса.
Такие данные позволяют определить место летательного аппарата вдоль контрольной оси (АЕ), проходящей между точкой возвращения и индикатором отклонения курса, и узнать, таким образом, когда оказывается достигнутой точка захвата В.
Указанные данные расстояния можно оценить на основании измерений времени распространения пакетов данных между наземной станцией и летательным аппаратом.
Указанные данные расстояния можно оценить на основании измерений времени распространения в одном направлении пакетов данных между наземной станцией и летательным аппаратом, при этом указанная наземная станция и летательный аппарат содержат синхронизированные датчики времени.
Таким образом, простое измерение времени распространения пакетов, которые можно передавать между летательным аппаратом и наземной станцией для других нужд, позволяет определить, достигнута ли точка захвата, не требуя использования дополнительной бортовой или наземной системы и, следовательно, сводя к минимуму потребление энергии летательным аппаратом.
Определение места летательного аппарата в точке захвата может включать в себя оценку данных скорости указанного летательного аппарата и определение расстояния, пройденного летательным аппаратом от точки возвращения, на основании указанных данных скорости.
Поскольку устройство обработки данных выполнено с возможностью применения для оптоэлектронной системы, содержащей устройство съемки изображений, установленное на борту летательного аппарата и расположенное по оси летательного аппарата, а также устройство обработки изображения, выполненное с возможностью обработки указанных изображений, данные скорости указанного летательного аппарата можно оценить при помощи указанной оптоэлектронной системы путем измерения скорости прохождения земли на указанных изображениях, снятых указанным устройством съемки изображений, и при помощи данных высоты полета, поступающих из альтиметра.
Таким образом, летательный аппарат может определить свое место на оси (АЕ) «точка возвращения - индикатор отклонения курса» автономно с точностью, не зависящей от расстояния, отделяющего его от индикатора отклонения курса и от наземной станции.
Данные скорости указанного летательного аппарата можно также оценивать путем измерения доплеровского эффекта, создаваемого движением летательного аппарата на сигналах, обмениваемых между летательным аппаратом и наземной станцией.
Таким образом, скорость летательного аппарата можно определить даже в случае неблагоприятных метеорологических условий, скрывающих землю.
Поскольку устройство обработки данных выполнено также с возможностью соединения с устройством съемки изображений, установленном на борту летательного аппарата, место летательного аппарата в точке захвата можно также определить путем обнаружения ориентира с известным положением по меньшей мере на одном изображении, снятом указанным устройством съемки изображений.
Такое обнаружение позволяет определять место летательного аппарата в точке захвата В с меньшей погрешностью, поскольку положение обнаруженного ориентира может быть известно очень точно.
Летательный аппарат можно вести между точкой возвращения и точкой захвата по заранее определенной прямолинейной траектории в направлении места индикатора отклонения курса.
Такая траектория позволяет минимизировать проходимое расстояние и, следовательно, энергию, расходуемую летательным аппаратом, чтобы достичь точки захвата В.
Летательный аппарат можно вести между точкой возвращения и точкой захвата по зигзагообразной или по ступенчатой траектории.
Такая траектория позволяет повысить точность вождения летательного аппарата за счет сравнения данных места летательного аппарата с точки зрения индикатора отклонения курса и соответствующих значений, таких как значения, определяемые летательным аппаратом.
Учитывая, что устройство обработки данных выполнено также с возможностью соединения с камерой, установленной на летательном аппарате, фаза обеспечения посадки может включать в себя оценку места точки приземления на изображении взлетно-посадочной полосы, снимаемом камерой, и оценку места летательного аппарата в зависимости от указанного оценочного места точки приземления на изображении и от данных высоты, выдаваемых альтиметром, и указанное вождение летательного аппарата от точки захода на посадку к точке приземления осуществляют, удерживая летательный аппарат на одной линии с осью взлетно-посадочной полосы.
Таким образом, вождение летательного аппарата можно осуществлять в течение всей посадки с меньшей погрешностью, чем если бы его осуществляли на основании измерений индикатора отклонения курса. Эта повышенная точность позволяет надежно вести летательный аппарат между точкой захода на посадку и точкой приземления и произвести его посадку.
Поскольку устройство обработки данных выполнено также с возможностью соединения с приемопередатчиком, установленным на борту указанного летательного аппарата и предназначенным для приема сигналов, передаваемых по меньшей мере тремя приемопередатчиками, находящимися на земле, фаза обеспечения посадки может включать в себя оценку данных места летательного аппарата на основании данных расстояний между бортовым приемопередатчиком и указанными по меньшей мере тремя наземными приемопередатчиками.
Использование информации о расстоянии между летательным аппаратом и неподвижными точками на земле с известным положением, такими как наземные приемопередатчики, позволяет уменьшить погрешность места летательного аппарата, чтобы точно вести летательный аппарат до точки приземления.
Вторым объектом изобретения является компьютерный программный продукт, содержащий командные коды для осуществления заявленного способа, когда эту программу исполняет процессор.
Третьим объектом изобретения является устройство обработки данных, выполненное с возможностью осуществления заявленного способа обеспечения.
Четвертым объектом изобретения является система обеспечения автоматической посадки летательного аппарата на взлетно-посадочную полосу от точки возвращения до точки приземления, на уровне которой летательный аппарат входит в контакт с взлетно-посадочной полосой, содержащая:
- альтиметр, выполненный с возможностью измерения высоты полета летательного аппарата,
- индикатор отклонения курса, расположенный на уровне наземной станции и выполненный с возможностью измерять, относительно контрольной точки, отклонение азимута летательного аппарата относительно контрольного направления, соединяющего указанную точку возвращения и место индикатора отклонения курса,
- заявленное устройство обработки данных.
Указанная заявленная система обеспечения может дополнительно содержать оптоэлектронную систему, содержащую устройство съемки изображений, установленное на борту летательного аппарата и выполненное с возможностью соединения с устройством обработки данных.
Указанная заявленная система обеспечения может дополнительно содержать камеру и соответствующее устройство обработки изображений, выполненные с возможностью соединения с устройством обработки данных.
Указанная заявленная система обеспечения может дополнительно содержать:
- по меньшей мере три приемопередатчика, находящиеся на земле;
- приемопередатчик, предназначенный для приема сигналов, передаваемых указанными по меньшей мере тремя наземными приемопередатчиками, установленный на указанном летательном аппарате и выполненный с возможностью соединения с устройством обработки данных.
Такие компьютерный программный продукт, устройство обработки данных и система имеют те же преимущества, которые были упомянуты выше в связи с заявленным способом.
Краткое описание чертежей
Другие признаки и преимущества будут более очевидны из нижеследующего описания варианта выполнения. Это описание представлено со ссылками на прилагаемые чертежи, на которых:
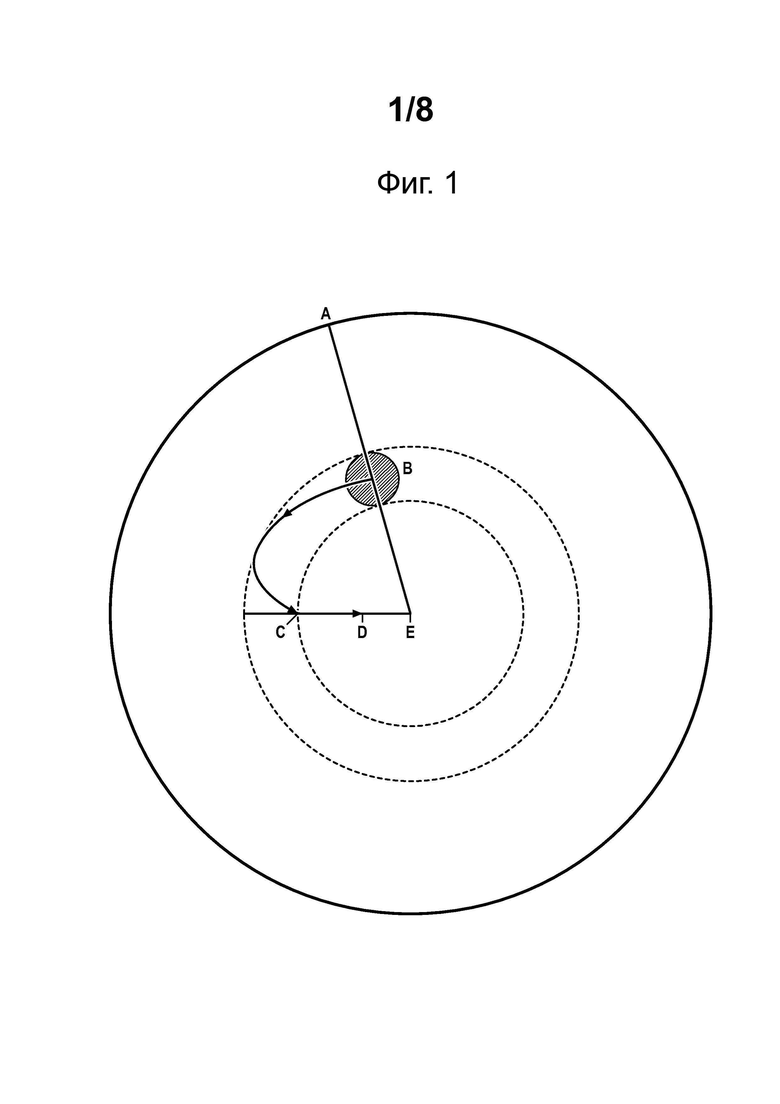
фиг. 1 - схема примера направленной посадки летательного аппарата на взлетно-посадочную полосу от точки возвращения до точки приземления согласно варианту осуществления изобретения;
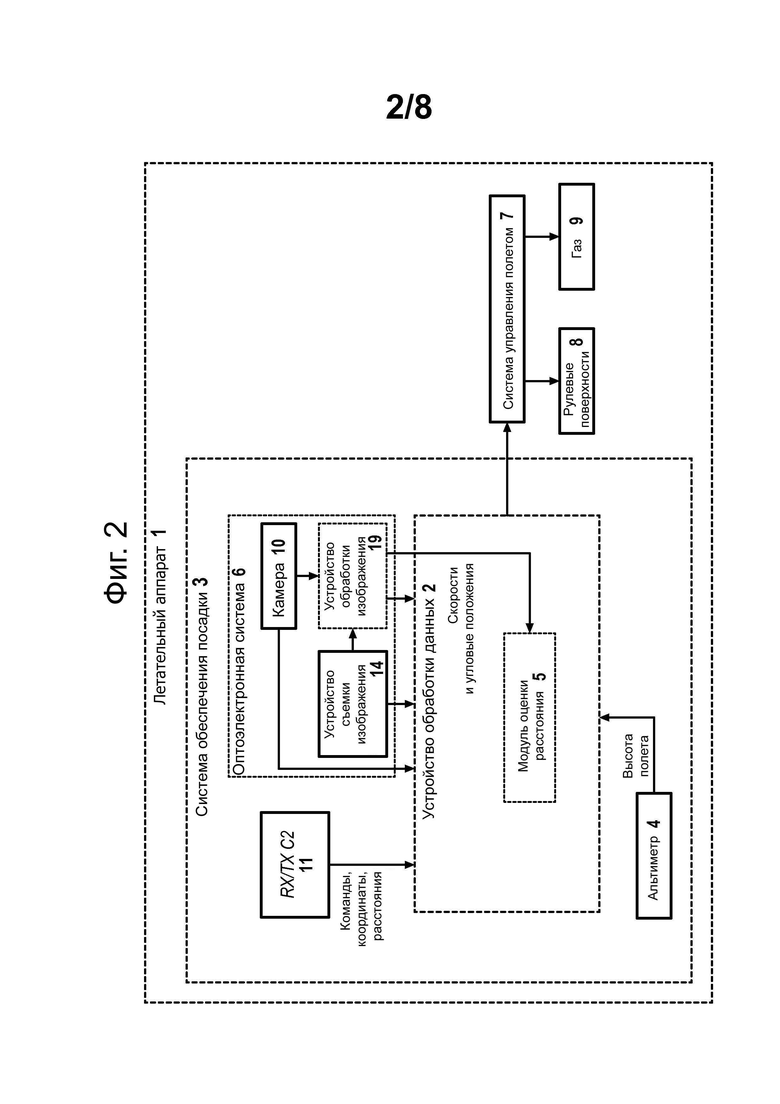
фиг. 2 - различные компоненты, которые могут входить в состав системы обеспечения посадки летательного аппарата в соответствии с изобретением;
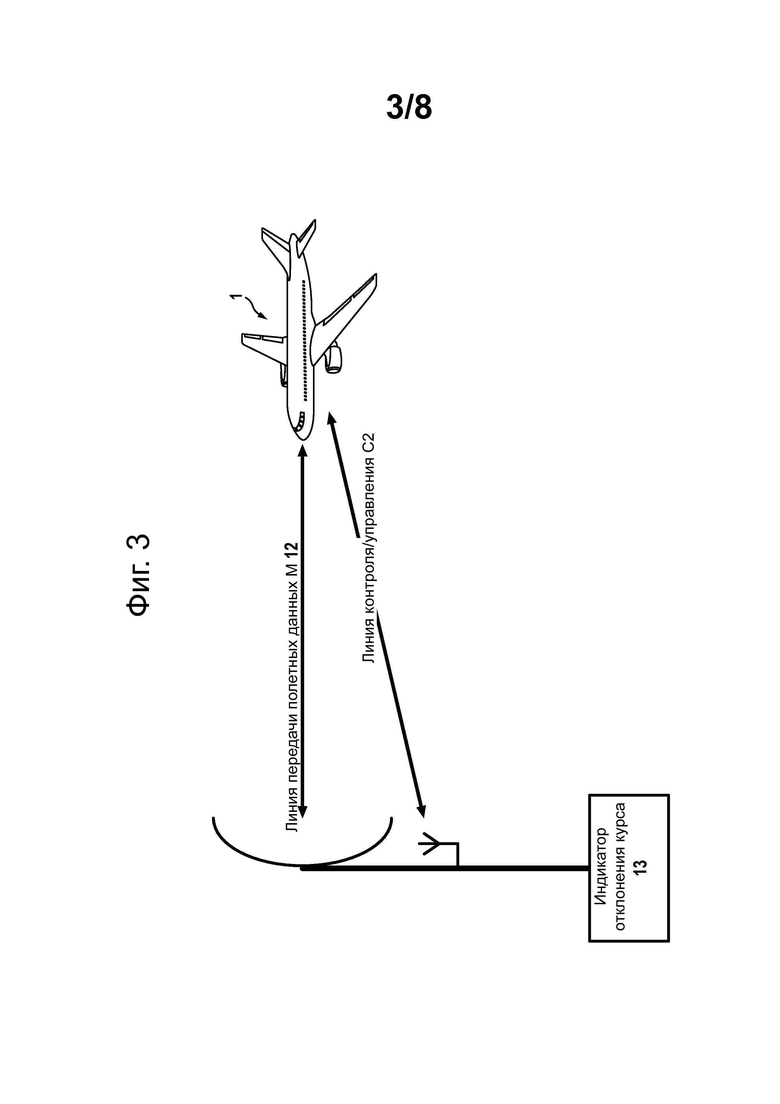
фиг. 3 - две линии связи, соединяющие устройство обработки данных с наземной станцией, а также индикатор отклонения курса, включенный в заявленную систему обеспечения посадки;
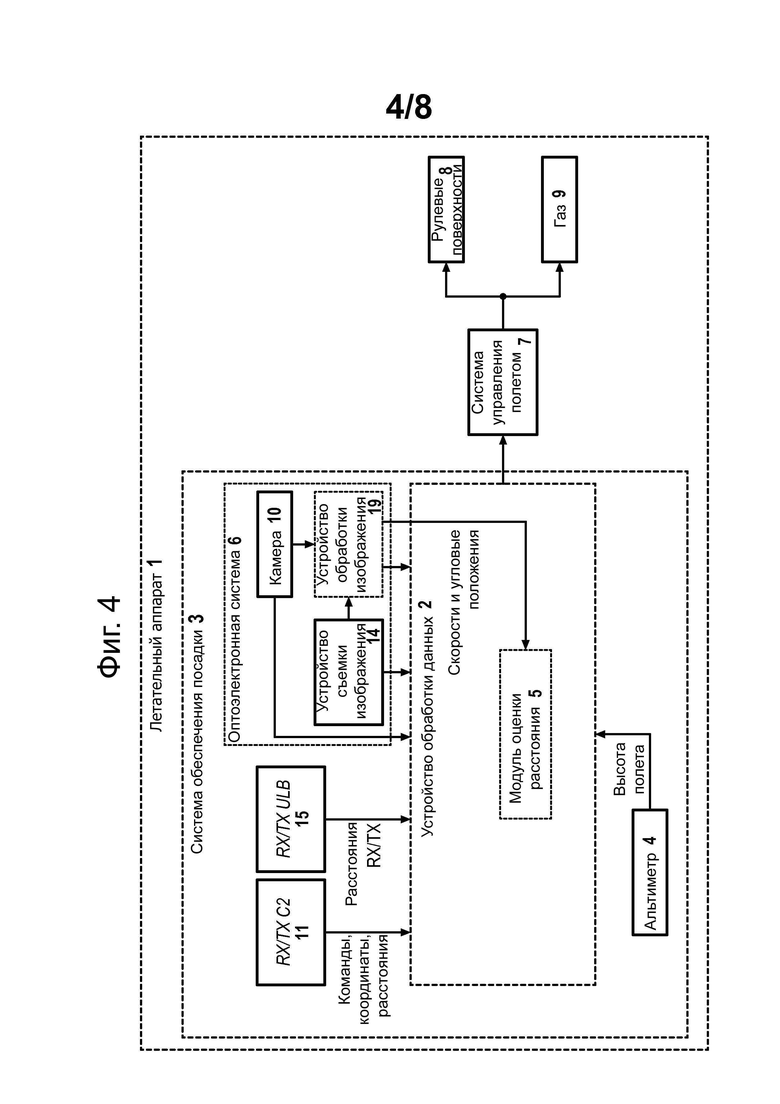
фиг. 4 - система обеспечения посадки летательного аппарата согласно варианту осуществления изобретения;
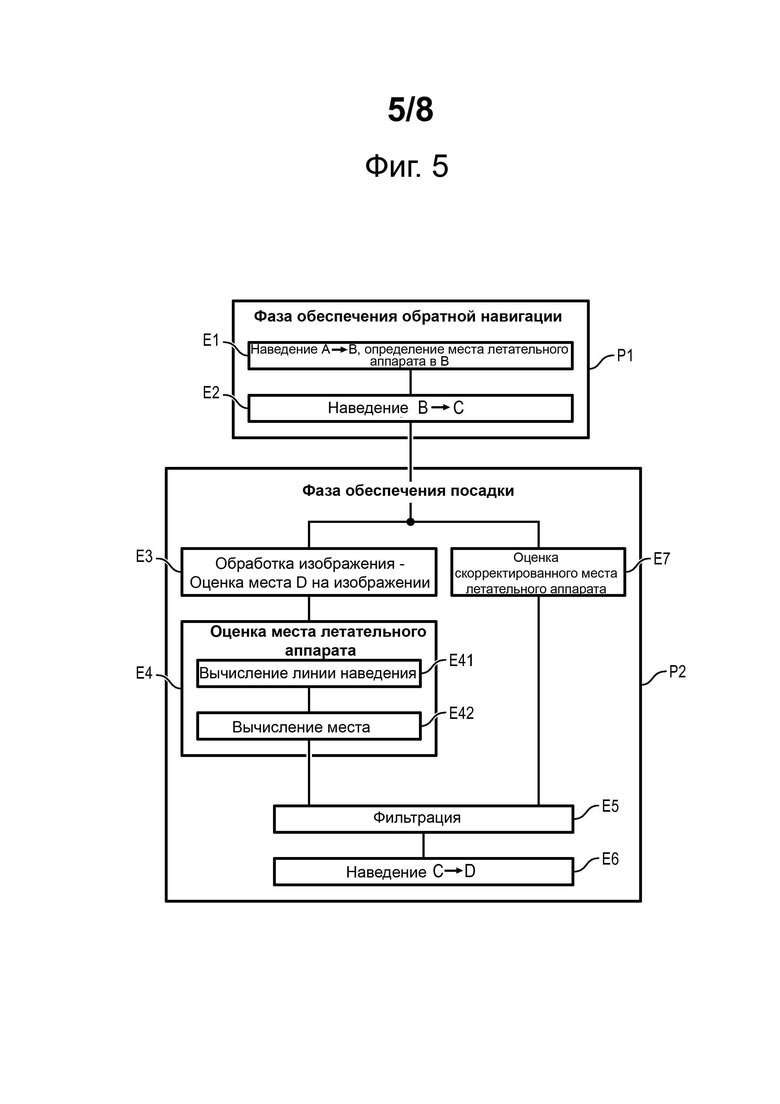
фиг. 5 - блок-схема примера осуществления заявленного способа обеспечения автоматической посадки летательного аппарата в соответствии с изобретением;
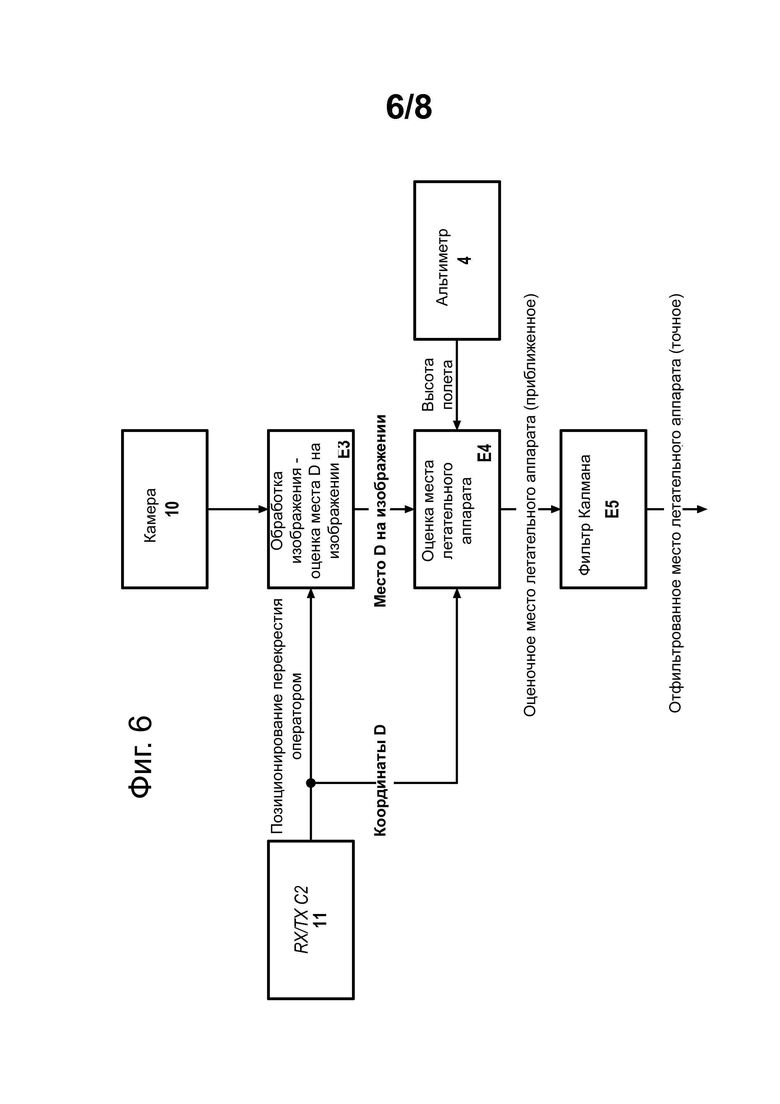
фиг. 6 - фаза обеспечения посадки в соответствии с изобретением, когда система обеспечения оснащена камерой;
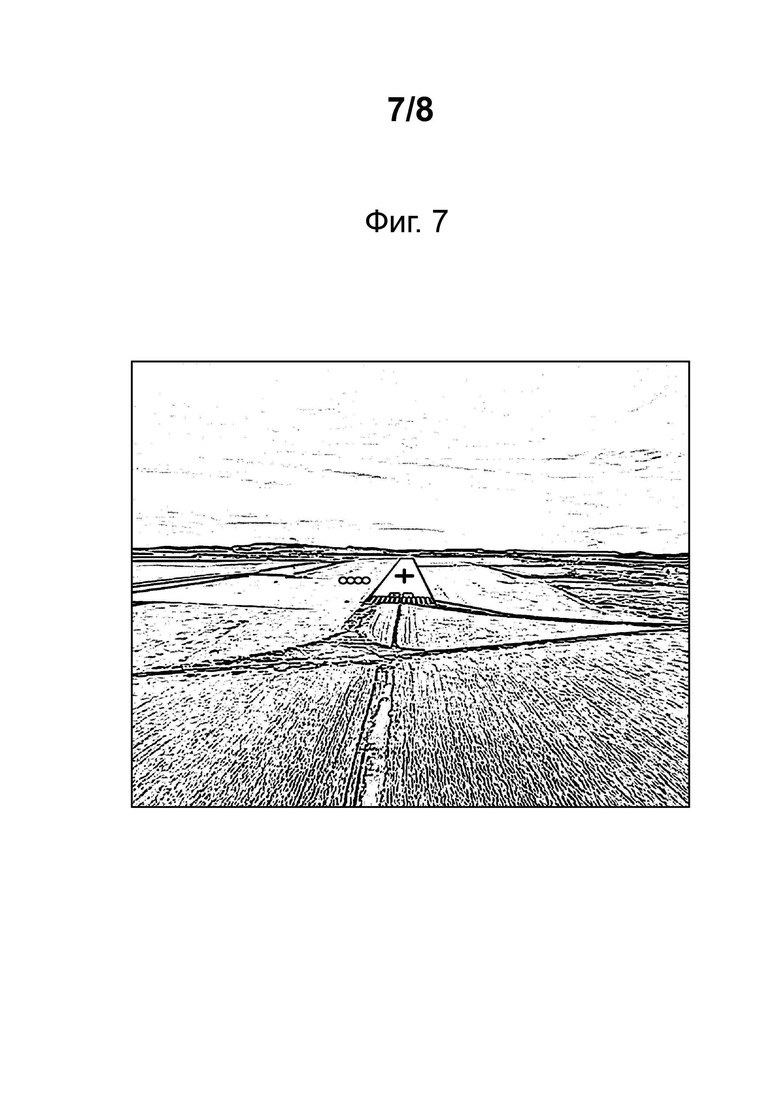
фиг. 7 - позиционирование перекрестия на изображении в точке приземления;
фиг. 8 - схема вычисления скорректированных данных места на основании измерений, выдаваемых индикатором отклонения курса, согласно варианту осуществления изобретения.
Подробное описание
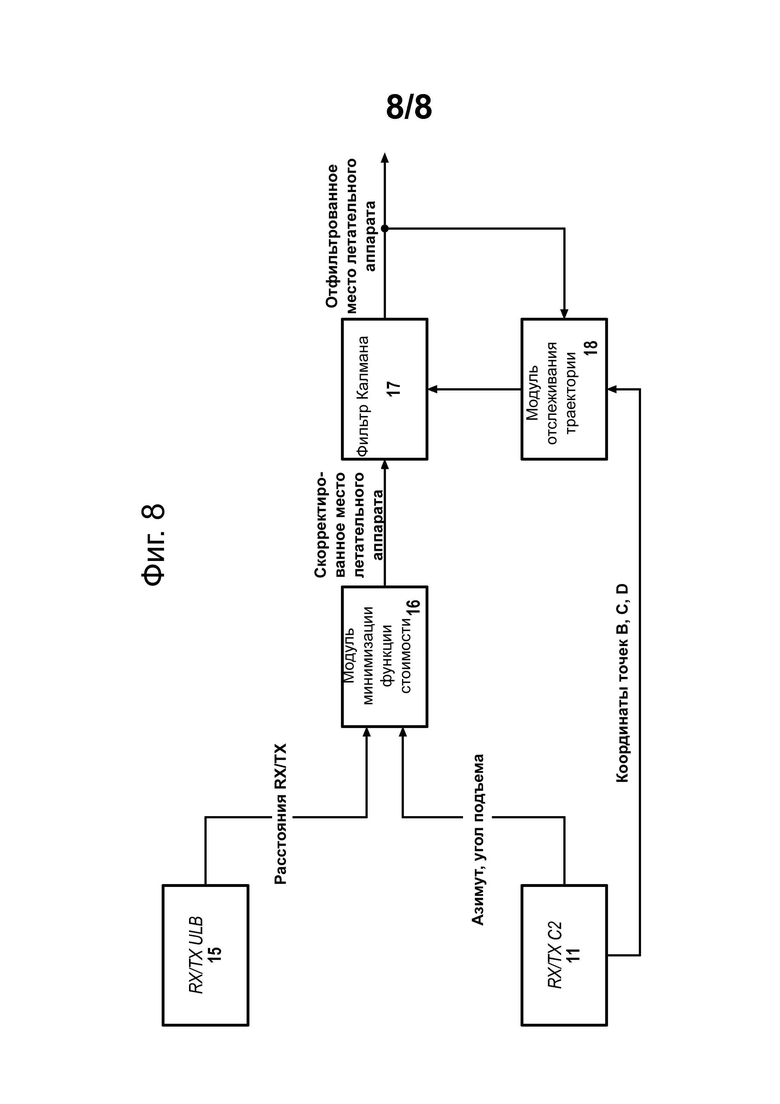
Вариант осуществления изобретения касается способа обеспечения автоматической посадки летательного аппарата 1 на взлетно-посадочную полосу из точки возвращения А до точки приземления D, в которой летательный аппарат входит в контакт с взлетно-посадочной полосой, как показано на фиг. 1.
Этот способ осуществляют при помощи устройства 2 обработки данных системы 3 обеспечения посадки, как показано на фиг. 2. Система 3 обеспечения посадки может также содержать альтиметр 4, который установлен на борту летательного аппарата и с которым может быть соединено устройство обработки данных.
Как показано на фиг. 1, можно также определить следующие точки:
- точка возвращения А: точка, начиная от которой система 3 обеспечения посадки обнаруживает летательный аппарат. Следует отметить, что в рамках изобретения эта точка указана при ее неизвестном месте (высота полета, расстояние и т.д.);
- точка захвата В: точка, начиная от которой летательный аппарат входит в фазу выравнивания по взлетно-посадочной полосе для приземления;
- точка захода на посадку С: точка на одной линии с осью полосы, через которую должен пройти летательный аппарат, прежде чем совершить посадку.
Альтиметр 4 может быть барометрическим альтиметром или лазерным альтиметром. Барометрический альтиметр может иметь точность до 10 метров и может регулироваться по значению атмосферного давления QNH, которое является барометрическим давлением, скорректированным от инструментальных погрешностей, погрешностей температуры и силы земного притяжения и приведенным к среднему уровню моря (MSL или Mean Sea Level). На практике давление QNH может быть задано относительно порога взлетно-посадочной полосы таким образом, чтобы альтиметр показывал географическую высоту точки приземления D, когда летательный аппарат находится над указанным порогом полосы. Лазерный альтиметр может иметь точность до 0,2 метра, и его можно использовать на высоте ниже 100 метров.
Кроме того, как известно, летательный аппарат 1 может быть оснащен автопилотом, выполненным с возможностью удержания летательного аппарата 1 во время полета на заданном курсе и на заданной высоте полета.
Этот способ обеспечивает надежное автономное направление летательного аппарата, такого как беспилотный аппарат, от удаленной точки возвращения до взлетно-посадочной полосы, например, взлетно-посадочной полосы аэропорта или более неровной полосы, и приземление летательного аппарата на этой полосе, несмотря на недоступность системы спутникового позиционирования или GNSS, при этом летательный аппарат сначала ведут к заранее определенной точке, называемой точкой захвата В, положение которой известно и которая находится относительно близко к взлетно-посадочной полосе, благодаря ведению летательного аппарата в заданном направлении, при этом отклонение относительно указанного заданного направления определяет наземная система на основании измерения данных азимута летательного аппарата относительно этой наземной системы.
Для этого устройство 2 обработки данных выполнено с возможностью установки на борту летательного аппарата и может содержать вычислительное устройство и интерфейс связи. Такое бортовое вычислительное устройство может представлять собой процессор или микропроцессор, например, типа х-86 или RISC, контроллер или микроконтроллер, цифровой сигнальный процессор DSP, интегральную схему, такую как ASIC, или программируемую схему, такую как FPGA, комбинацию таких элементов или любую другую комбинацию, позволяющую осуществлять этапы вычисления описанного ниже способа. Такой интерфейс связи может быть любым интерфейсом, аналоговым или цифровым, позволяющим вычислительному устройству обмениваться информацией с другими элементами системы 3 обеспечения, такими как альтиметр 4. Такой интерфейс может быть, например, последовательным интерфейсом RS232, интерфейсом USB, Firewire, HDMI или сетевым интерфейсом типа Ethernet, или любым другим интерфейсом, применяемым в авиации.
Как показано на фиг. 2, вычислительное устройство устройства 2 обработки данных может быть соединено с системой 7 управления полетом (SCV). Система 7 управления полетом может обеспечивать реальное ведение летательного аппарата в контрольном направлении следования к точке захвата В на основании данных наведения, выдаваемых вычислительным устройством устройства обработки данных в зависимости от данных положения летательного аппарата, таких как курс, крен и тангаж, определяемых датчиками, встроенными в SCV, и от данных отклонения азимута, выдаваемых вышеупомянутой наземной системой. Для этого система управления полетом может передавать команды на органы пилотирования летательного аппарата, такие как электрические, гидравлические или гибридные приводы, приводящие в действие плоскости управления 8, или газ 9. Таким образом, ведение летательного аппарата к указанной точке захвата В происходит за счет автоматического регулирования по заданному значению направления.
Устройство 2 обработки данных может быть связано с наземной станцией, как правило, расположенной вблизи аэропорта или взлетно-посадочной полосы, через две линии связи, как показано на фиг. 3:
- линию 11, называемую линией «контроля/управления» С2, которая является радиоэлектрической и двунаправленной в полосе электромагнитного спектра от 3 до 6 ГГц и обеспечивает обмен сообщениями контроля и управления между наземной станцией и летательным аппаратом. Передаваемые сигналы модулируются посредством модуляции с одной несущей и передаются/принимаются при помощи антенны всенаправленного излучения, установленной на вершине мачты на наземной станции;
- радиоэлектрическую и двунаправленную линию 12 М передачи полетных данных в полосе электромагнитного спектра от 10 до 15 ГГц, которая обеспечивает обмен потоками данных, генерируемыми различными бортовыми датчиками. Передаваемые сигналы модулируются посредством модуляции с несколькими несущими и передаются/принимаются при помощи направленной антенны, такой как параболическая антенна, установленная на вершине мачты.
Система 3 обеспечения посадки содержит также индикатор 13 отклонения курса. Такой индикатор отклонения курса представляет собой наземную систему, соединенную с направленной антенной наземной станции, используемой для линии 12 передачи полетных данных. Индикатор отклонения курса выполнен с возможностью непрерывного измерения направления, которому следует летательный аппарат, то есть азимута летательного аппарата относительно контрольного направления, например, направления на Север. Индикатор отклонения курса может также измерять угол возвышения летательного аппарата относительно контрольной плоскости, например, плоскости, касательной к земле. Азимут и угол возвышения летательного аппарата измеряют относительно контрольной точки, например, относительно места направленной антенны, установленной на вершине мачты. В дальнейшем тексте документа эта контрольная точка будет называться местом индикатора отклонения курса и будет обозначаться Е. Индикатор отклонения курса может измерять эти углы на основании ориентации направленной антенны, получаемой от электромеханического устройства позиционирования антенны, выполненного с возможностью позиционировать направленную антенну по пеленгу и углу места таким образом, чтобы направлять ее в сторону летательного аппарата для обеспечения максимального качества связи.
Способ предусматривает использование этих данных азимута, определяемых индикатором отклонения курса, для ведения летательного аппарата в направлении места индикатора отклонения курса. В частности, направление, которому должен следовать летательный аппарат, устанавливается путем автоматического регулирования в замкнутом контуре: индикатор отклонения курса может измерять и передавать в летательный аппарат отклонение между этими измеряемыми данными азимута и азимутом следования, соответствующим направлению АЕ, соединяющему точку возвращения А и место Е индикатора отклонения курса. На основании этих данных отклонения азимута вычислительное устройство устройства обработки данных определяет данные наведения и передает их в систему управления полетом, затем система управления полетом летательного аппарата может ориентировать его, чтобы устранить это отклонение и вести летательный аппарат к месту Е индикатора отклонения курса.
Таким образом, этот этап способа обеспечивает относительное ведение летательного аппарата без необходимости его геолокализации с определением на предварительном этапе места точки возвращения А, положения магнитного Севера или положения взлетно-посадочной полосы, как это предложено в известном решении. Следовательно, заявленный способ является более простым и позволяет отказаться от предварительной калибровки системы. Действительно, достаточно обнаружить летательный аппарат, чтобы запустить его наведение. Кроме того, использование оси (АЕ) в качестве контрольного направления позволяет отказаться от использования бортового инерциального счетчика текущих координат.
В варианте осуществления угол возвышения летательного аппарата обрабатывают так же, как и его азимут. Индикатор отклонения курса может также передавать на летательный аппарат отклонение угла возвышения между измеренным углом возвышения летательного аппарата и контрольным углом возвышения, соответствующим углу возвышения в направлении АЕ, измеряемому во время позиционирования летательного аппарата в точке возвращения А. Использование такого отклонения угла возвышения системой управления полетом приводит к этом случае к постепенному снижению высоты полета летательного аппарата по мере его продвижения к месту индикатора отклонения курса.
Во втором варианте осуществления изобретения для ведения летательного аппарата используют только измерения отклонения азимута, производимые на постоянной высоте полета в зависимости от измерений альтиметра летательного аппарата.
В третьем варианте осуществления изобретения измерения азимута и угла возвышения применяют для ведения, но высоту полета летательного аппарата поддерживают постоянной, изменяя в течение времени контрольный угол возвышения, используемый для измерений отклонения угла возвышения.
В последнем варианте осуществления изобретения применяют ведение, аналогичное первому варианту, пока летательный аппарат не достигнет минимальной высоты полета, начиная от которой ведение осуществляют на постоянной высоте полета.
В различных описанных ниже вариантах осуществления изобретения данные высоты полета летательного аппарата, выдаваемые альтиметром, можно корректировать при необходимости, чтобы они соответствовали относительной высоте полета летательного аппарата относительно контрольной точки, например, относительно высоты индикатора отклонения курса. Это позволяет, например, не учитывать изменения высоты местности, над которой пролетает летательный аппарат.
Летательный аппарат можно вести в этом направлении, пока он не окажется в точке захвата В с известным положением относительно близко к взлетно-посадочной полосе. В варианте осуществления изобретения точка захвата В находится приблизительно на одной линии с точкой возвращения А и с местом Е индикатора отклонения курса, когда азимут следования летательного аппарата находится на одной линии с осью АЕ. В альтернативном варианте азимут следования может отклоняться от оси АЕ, и в этом случае точка захвата В будет отстоять от этой оси и не находиться на одной линии с точкой возвращения А и с местом Е индикатора отклонения курса.
Начиная от этой точки В захвата с известным положением летательному аппарату можно задать заранее определенную траекторию, чтобы привести его к заранее определенной точке С захода на посадку, находящейся приблизительно на одной линии с осью взлетно-посадочной полосы, с направлением движения летательного аппарата, тоже находящимся на одной линии с осью полосы. Точка С захода на посадку может находиться на периферии зоны захода на посадку, центрованной по точке D приземления или по месту Е индикатора отклонения курса и имеющей заранее определенный радиус, как показано на фиг. 1. Например, такая зона захода на посадку может иметь радиус, меньший или равный 5 км.
Система 3 обеспечения посадки может также содержать несколько дополнительных систем, позволяющих обнаруживать место летательного аппарата в точке B захвата.
Так, система обеспечения посадки может содержать оптоэлектронную систему 6, включающую в себя устройство 14 съемки изображений, установленное на борту летательного аппарата, и устройство 19 обработки изображения, выполненное с возможностью обработки указанных изображений и связанное с устройством 2 обработки данных. Устройство обработки изображения выполнено с возможностью обнаруживать любой объект с определенными характеристиками (геометрические характеристики, световые характеристики, тепловая сигнатура и т.д.) и определять его угловое положение относительно контрольной оси (например, относительно оси движения летательного аппарата, проходящей через центр снятого изображения или через любое место, определенное на этом изображении). Это съемочное устройство и соответствующее ему устройство обработки изображения можно применять для обнаружения ориентира на земле, находящегося в точке В захвата или вблизи этой точки. Такой наземный ориентир может, например, представлять собой здание, сигнальный знак или географический ориентир, такой как перекресток дорог. Обнаружение этого ориентира на изображениях, снятых устройством съемки изображений, позволяет определить, в какой момент летательный аппарат оказывается приблизительно в В точке захвата. Поле зрения устройства съемки изображений не обязательно центровано по оси перемещения летательного аппарата. Угол между осью перемещения летательного аппарата и осью, соединяющей устройство съемки изображений и заранее определенную точку изображений, снятых устройством, например их центр, можно определить посредством построения или калибровки, чтобы узнать направление движения летательного аппарата относительно снятых этим устройством изображений. Это направление можно отметить на снятых изображениях, если оно входит в поле зрения устройства и известно устройству обработки изображений.
Место летательного аппарата в точке В захвата можно также определить посредством измерения расстояния между летательным аппаратом и контрольной точкой на земле, находящейся на одной линии с точкой А возвращения и с местом Е индикатора отклонения курса. Эта контрольная точка на земле может быть, например, самим местом Е индикатора отклонения курса. Данные расстояния между летательным аппаратом и местом индикатора отклонения курса может определять наземная станция в зависимости от времени передачи сигнала между наземной станцией и летательным аппаратом, или их можно определить при помощи другой станции, такой как радар, затем эти данные расстояния могут быть переданы в летательный аппарат через линию связи 11 контроля/управления. В альтернативном варианте, как показано на фиг. 2, летательный аппарат может сам оценивать расстояние, отделяющее его от наземной станции. В этом случае система 3 обеспечения может содержать модуль 5 оценки расстояния, установленный на борту летательного аппарата и предназначенный для оценки расстояния между летательным аппаратом и наземной станцией. Этот модуль может быть встроен в устройство 2 обработки данных. Модуль оценки расстояния может оценивать это расстояние посредством измерения времени распространения по меньшей мере одного пакета данных между летательным аппаратом и наземной станцией по линии связи 11 контроля/управления или по линии 12 передачи полетных данных. В альтернативном варианте модуль оценки расстояния может быть встроен или может быть связан с дополнительным бортовым приемопередатчиком, предназначенным для обмена пакетами данных с наземной станцией, с целью измерения расстояния между летательным аппаратом и станцией; модуль оценки расстояния может оценивать это расстояние посредством измерения времени распространения по меньшей мере одного пакета данных между летательным аппаратом и наземной станцией через этот дополнительный приемопередатчик. Пакеты данных, передаваемые между летательным аппаратом и наземной станцией, могут быть помечены по дате и времени, чтобы можно было определить время распространения в одну сторону между летательным аппаратом и наземной станцией. Летательный аппарат может при этом содержать на борту датчик времени, синхронизированный с датчиком времени наземной станции.
Место летательного аппарата в точке В захвата можно также определять путем вычисления расстояния, пройденного летательным аппаратом от точки А возвращения, на основании данных скорости летательного аппарата относительно земли. Эти данные скорости можно получать при помощи оптоэлектронной системы 6 или посредством измерения скорости при помощи другого описанного выше бортового устройства, например, путем измерения доплеровского эффекта на обмениваемых электромагнитных волнах на одной из двух линий передачи данных или путем измерения скорости при помощи одного или нескольких специальных устройств, установленных на борту летательного аппарата. Например, для измерения относительной скорости летательного аппарата относительно окружающего воздуха можно использовать зонд Пито, при этом другой датчик, находящийся, например, на наземной станции, можно использовать для измерения скорости ветра, и эти два измерения можно комбинировать для оценки скорости летательного аппарата относительно земли.
Система 3 обеспечения посадки может также содержать дополнительную систему позиционирования, предназначенную для ведения летательного аппарата в зоне захода на посадку во время фазы посадки до точки приземления.
В первом варианте, система 3 обеспечения посадки содержит камеру 10, установленную на борту летательного аппарата, с которой может быть соединено устройство обработки изображения. Такая камера может быть инфракрасной панорамной камерой, например, типа SWIR (“Short Wave Infrared Range” с длиной волны от 0,9 до 1,7 микрон), MWIR (“Medium Wave Infrared Range”) или LWIR (“Long Wave Infrared Range”). Она может также работать в видимом спектре. Эта камера 10 может быть совмещена с устройством 14 съемки изображений или может быть отдельной от него. Видеопоток, снимаемый камерой, передается, с одной стороны, в устройство 19 обработки изображения, чтобы засечь взлетно-посадочную полосу и определить через устройство 2 обработки данных место летательного аппарата относительно этой полосы во время посадки, и, с другой стороны, на наземную станцию при помощи линии передачи полетных данных. В варианте выполнения камера представляет собой систему съемки изображений, которая может иметь несколько оптических полей, несколько спектральных полос обнаружения и даже несколько датчиков изображения в зависимости от решаемых ею задач. Система обработки изображений выполнена с возможностью комбинировать и анализировать все эти изображения при помощи известных способов.
Во втором варианте, показанном на фиг. 4, система 3 обеспечения посадки содержит по меньшей мере один приемопередатчик, находящийся на земле, и бортовой приемопередатчик 15 на летательном аппарате, выполненный с возможностью соединения с устройством 2 обработки данных. Такие приемопередатчики могут представлять собой радиоэлектрические маяки ULB (ультраширокополосные). Обмениваясь сигналами с наземными приемопередатчиками, бортовой приемопередатчик может определять расстояние, отделяющее его от каждого из наземных приемопередатчиков, например, посредством измерения времени передачи сигнала в обоих направлениях. Бортовой приемопередатчик выполнен также с возможностью передачи этих расстояний в устройство 2 обработки. Зная положения приемопередатчиков на земле, устройство 2 обработки может определить место летательного аппарата, скорректированное на основании данных азимута и угла возвышения, переданных индикатором отклонения курса, и данных расстояния, выдаваемых бортовым приемопередатчиком. На практике, место летательного аппарата можно оценивать таким образом при помощи по меньшей мере трех приемопередатчиков или же при помощи по меньшей мере трех приемопередатчиков с добавлением информации о высоте полета летательного аппарата, выдаваемой альтиметром.
Этапы способа более подробно описаны ниже со ссылками на фиг. 5.
Способ может содержать фазу Р1 обеспечения обратной навигации, в ходе которой устройство обработки данных ведет летательный аппарат вдоль заданной траектории от точки А возвращения до заданной точки С захода на посадку, находящейся приблизительно на одной линии с осью взлетно-посадочной полосы, на основании данных высоты полета, выдаваемых альтиметром 4, данных курса и скорости летательного аппарата и данных отклонения (в частности, азимута и, возможно, угла возвышения), передаваемых индикатором отклонения курса.
Способ может также содержать фазу Р2 обеспечения посадки, в ходе которой устройство обработки данных ведет летательный аппарат от точки С захода на посадку до точки D приземления, находящейся на взлетно-посадочной полосе.
Фаза Р1 обеспечения навигации может содержать первый этап Е1 ведения летательного аппарата от точки А возвращения в направлении места Е индикатора отклонения курса на основании измерений отклонения азимута относительно контрольного направления, передаваемых индикатором отклонения курса. Для этого направление АЕ, соединяющее точку А возвращения и место Е индикатора отклонения курса, можно принять за контрольное направление, и индикатор отклонения курса может использовать производимое им в каждый момент измерение реального азимута летательного аппарата, чтобы определять в каждый момент отклонение между измеряемым азимутом и контрольным направлением. Затем индикатор отклонения курса может в каждый момент передавать вычисленное отклонение азимута в устройство обработки данных через одну из линий передачи данных. При этом устройство обработки данных может в каждый момент вести летательный аппарат таким образом, чтобы устранить это отклонение, заставляя летательный аппарат следовать контрольному направлению, направляя его к месту Е индикатора отклонения курса. Этот первый этап Е1 ведения может включать в себя определение места летательного аппарата в заранее определенной точке В захвата, приблизительно находящейся на одной линии с точкой А возвращения и с местом Е индикатора отклонения курса. Таким образом, устройство обработки может определить, в какой момент летательный аппарат, реальное место которого неизвестно с момента его вылета из точки А возвращения, достигнет точки В захвата, место которой известно.
Как было указано выше, место летательного аппарата в точке В захвата можно определить на основании данных расстояния между летательным аппаратом 1 и контрольной точкой на земле, находящейся на одной линии с точкой А возвращения и с местом Е индикатора отклонения курса, которое является самой точкой Е. Поскольку положения Е индикатора отклонения курса и точки В захвата известны, и летательный аппарат находится на одной линии с этими двумя точками, устройство обработки может вывести расстояние между летательным аппаратом и точкой В захвата на основании данных расстояния между летательным аппаратом и индикатором отклонения курса. Когда это расстояние является нулевым, летательный аппарат находится в точке В захвата, если не считать погрешностей измерения.
Эти данные расстояния могут поступать от наземной станции через одну из двунаправленных радиоэлектрических линий. Эти данные расстояния могут быть также переданы самим устройством обработки данных на основании измерения времени распространения в одном направлении или в двух направлениях между летательным аппаратом и наземной станцией.
В альтернативном варианте эти данные расстояния можно определить, определяя место летательного аппарата на основании контролируемого изменения азимута летательного аппарата или угла возвышения летательного аппарата, когда он находится достаточно близко от наземной станции. Такое контролируемое изменение может быть задано дистанционно пилотом, находящимся на наземной станции. Для этого летательный аппарат может, например, осуществить заранее определенное изменение высоты полета, контролируемое при помощи измерения альтиметра. Такое изменение приводит к изменению угла возвышения в данных измерения, получаемых индикатором отклонения курса. Это изменение позволяет определить место летательного аппарата и, следовательно, расстояние, на котором летательный аппарат находится от места Е индикатора отклонения курса.
Определение места летательного аппарата в точке В захвата может включать в себя оценку данных скорости указанного летательного аппарата и определение расстояния, пройденного летательным аппаратом от точки А возвращения, на основании указанных данных скорости, например, осуществляя их интегрирование во время перемещения летательного аппарата. Поскольку места точки А возвращения и точки В захвата известны, и летательный аппарат находится на одной линии с этими двумя точками, устройство обработки данных может вывести расстояние между летательным аппаратом и точкой В захвата на основании данных расстояния между летательным аппаратом и точкой А возвращения. Когда это расстояние является нулевым, летательный аппарат находится в точке В захвата, если не считать погрешностей измерений.
Данные скорости летательного аппарата можно оценить при помощи оптоэлектронной системы 6 посредством измерения скорости прохождения земли на изображениях, снятых устройством съемки изображений, и на основании данных высоты, выдаваемых альтиметром.
Данные скорости летательного аппарата можно также оценить посредством измерения доплеровского эффекта, порождаемого движением летательного аппарата. Например, устройство обработки данных может измерить сдвиг по частоте, индуцируемый перемещением летательного аппарата в сигналах, поступающих по одной из двух линий передачи данных от наземной станции и индикатора отклонения курса.
Данные скорости летательного аппарата можно также измерять при помощи другой бортовой системы, такой как зонды Пито. Поскольку такие зонды измеряют только скорость летательного аппарата относительно окружающего воздуха и, следовательно, не могут достоверно отражать скорость летательного аппарата относительно земли в случае ветра, эти данные можно дополнить информацией о скорости окружающих ветров вдоль траектории, которой следует летательный аппарат. Эти данные скорости могут быть определены метеорологической станцией, входящей в состав наземной станции, при помощи известных способов.
Кроме того, определение места летательного аппарата в точке В захвата можно также производить посредством обнаружения ориентира с известным положением по меньшей мере на одном изображении, снятом указанным устройством съемки изображений, как было указано выше, в сочетании с данными высоты полета летательного аппарата, выдаваемыми альтиметром. Устройство съемки изображений можно также применять для обнаружения ориентира с известным положением заранее, прежде чем летательный аппарат окажется вблизи точка В захвата, во время пути от точки возвращения. Такое обнаружение можно использовать, чтобы проверять и при необходимости корректировать расстояние между текущим положением летательного аппарата и точкой захвата, определяемое при помощи одного из описанных выше средств.
Такой ориентир, позволяющий определить место летательного аппарата в точке В захвата, может быть местом Е самого индикатора отклонения курса. Действительно, во время первого этапа Е1 ведения летательный аппарат направляется к месту Е индикатора отклонения курса, которое находится на оси движения летательного аппарата в поле зрения оптоэлектронной системы. Оптоэлектронная система может обнаруживать на изображениях устройства съемки изображений индикатор отклонения курса на расстоянии примерно 1-2 км. Поскольку, как правило, индикатор отклонения курса находится недалеко от взлетно-посадочной полосы, значит, летательный аппарат находится на сравнимом расстоянии от нее, которое позволяет применить заранее определенное движение до точки С захода на посадку, чтобы привести летательный аппарат на одну линию с взлетно-посадочной полосой. Точка С захода на посадку может также совпадать с местом Е индикатора отклонения курса, если этот индикатор отклонения курса находится приблизительно на одной линии с осью полосы.
В различных вариантах определения места летательного аппарата в точке захвата В с использованием оптоэлектронной системы, эта система может использовать, изображения поступающие из камеры, например, в случае неисправности устройства 14 съемки изображений.
Во время такого определения места летательного аппарата в точке В захвата в зависимости от места Е индикатора отклонения курса нет необходимости знать абсолютные географические координаты точки В захвата, точки С захода на посадку и места Е индикатора отклонения курса. Знание относительных положений этих точек между собой и относительно взлетно-посадочной полосы является достаточным, чтобы эффективно вести летательный аппарат относительно полосы и правильно позиционировать его для его приземления. Это может представлять особый интерес, когда взлетно-посадочная полоса является временной и когда условия, например, такие как отсутствие сигнала GPS, усложняют точное позиционирование полосы. Кроме того, нет необходимости в какой-либо другой контрольной точке для обеспечения нормальной работы оптоэлектронной системы и для вождения летательного аппарата.
Наконец, определение места летательного аппарата в точке В захвата можно осуществлять, определяя данные места летательного аппарата, такие как долгота и широта. Если данные спутникового позиционирования являются доступными, место летательного аппарата можно определить на основании:
- азимута, измеряемого индикатором отклонения курса, и
- двух данных среди:
- угла подъема летательного аппарата, измеряемого индикатором отклонения курса,
- расстояния между летательным аппаратом и индикатором отклонения курса, определяемым, как было указано выше,
- высоты полета летательного аппарата относительно индикатора отклонения курса, получаемой при помощи измерений альтиметра.
Вычисление данных места при помощи измерений, передаваемых индикатором отклонения курса, можно осуществлять по полярным координатам с центром в месте Е индикатора отклонения курса, затем полученные данные места летательного аппарата можно преобразовать в декартовы координаты в виде долготы и широты.
Таким образом, в результате первого этапа Е1 ведения летательный аппарат позиционирован в точке В захвата. Затем фаза Р1 обеспечения обратной навигации может включать в себя второй этап Е2 ведения летательного аппарата вдоль заданной траектории от точки В захвата до точки С захода на посадку, находящейся приблизительно на одной линии с осью взлетно-посадочной полосы. Вдоль этой заданной траектории летательный аппарат может отклоняться от теоретической траектории под действием ветра. Чтобы скорректировать положение летательного аппарата для его удержания на заданной траектории, ведение летательного аппарата можно осуществлять на основании данных высоты полета, выдаваемых альтиметром, и данных курса и скорости летательного аппарата. Ведение можно также улучшить, учитывая локальные метеорологические данные, такие как данные ветра, или корректируя точечно или непрерывно положение летательного аппарата относительно конкретного ориентира, например, точки D приземления или места Е индикатора отклонения курса. В частности, ведение летательного аппарата можно осуществлять, сохраняя этот ориентир видимым на изображениях, снятых оптоэлектронной системой, в угловом положении, определяемым в зависимости от движения вдоль траектории между точкой В захвата и точкой С захода на посадку.
Во время этого первого этапа Е1 ведения заданная траектория, которой следует летательный аппарат между точкой А возвращения и точкой В захвата, может быть прямолинейной, что позволяет минимизировать проходимое расстояние и энергию, потребляемую для достижения точки В захвата.
В альтернативном варианте заранее определенная траектория, которой следует летательный аппарат между точкой А возвращения и точкой В захвата, может быть зигзагообразной или ступенчатой. Такая траектория позволяет слегка изменять ориентацию положения направленной антенны наземной станции и, следовательно, уменьшить погрешность в азимуте и/или угле подъема, измеряемых индикатором отклонения курса.
Описанные выше этапы позволяют получать место летательного аппарата с достаточной точностью, чтобы привести летательный аппарат в створ взлетно-посадочной полосы до точки С захода на посадку. Однако полученная точность может оказаться недостаточной для ведения летательного аппарата до точки приземления и для его посадки на взлетно-посадочную полосу. При погрешности позиционирования летательный аппарат может пройти в стороне от полосы. Следовательно, желательно получить место летательного аппарата с более высокой точностью, гарантирующей надежную посадку.
В первом варианте, представленном на фиг. 5 и 6, во время фазы Р2 обеспечения посадки, в ходе которой летательный аппарат ведут от точки С захода на посадку до точки D приземления, можно использовать изображения взлетно-посадочной полосы и точки D приземления, получаемые при помощи камеры 10, установленной на борту летательного аппарата. Для этого фаза Р2 обеспечения посадки может содержать этап Е3 обработки изображения, во время которого место точки D приземления оценивают на однoм или нескольких изображениях среди потока изображений взлетно-посадочной полосы, последовательно снятых камерой. Этот этап можно осуществлять многократно в течение всего захода на посадку летательного аппарата и его приземления.
Это отслеживание точки приземления на изображении может быть полностью автоматическим, если точка приземления легко обнаруживается на изображении, например, если точка приземления обозначена на взлетно-посадочной полосе в виде наземного ориентира или если саму полосу можно обнаружить благодаря присутствию на земле одного или нескольких знаков, таких как разметка или посадочные огни. Положение точки приземления на изображении можно определить при помощи известных технологий распознавания формы или изображения.
В альтернативном варианте место точки приземления на изображении может уточнить оператор на первом изображении через линию 11 контроля/управления, например, расположив на изображении перекрестие наведения на точку приземления, как показано на фиг. 7. Затем устройство обработки данных может обеспечить отслеживание места точки приземления, показанной перекрестием, на изображениях, получаемых в дальнейшем от бортовой камеры, и автоматически корректировать положение перекрестия, чтобы удерживать его нацеленным на точку приземления. Такая ручная инициация отслеживания может быть необходимой, когда разметки взлетно-посадочной полосы или точки приземления оказывается недостаточно для автоматического отслеживания или когда условия полета (ночное время, дождь, туман…) не позволяют производить такое автоматическое отслеживание. В случае необходимости, оператор может корректировать отслеживание места, поправляя вручную один или несколько раз положение перекрестия на текущем изображении, чтобы перекрестие оставалось нацеленным на точку приземления на обрабатываемых последовательных изображениях. Для облегчения автоматического отслеживания места точки приземления с двух сторон от взлетно-посадочной полосы на точке приземления можно расположить видимые источники света или инфракрасные маяки, адаптированные к спектру обнаружения системой съемки изображений.
Фаза Р2 обеспечения посадки может также содержать первый этап Е4 определения места, во время которого место летательного аппарата оценивают в зависимости от места точки приземления, полученного путем оценки на изображении во время этапа Е3 обработки изображения. Эта оценка требует также данных высоты полета летательного аппарата, получаемых от альтиметра, и координат точки приземления, которые могут поступать от наземной станции через линию 11 контроля/управления. По завершении первого этапа Е4 определения места устройство обработки данных имеет место летательного аппарата, например, в виде долготы и широты. Это место можно использовать для ведения летательного аппарата до его посадки в точке D приземления во время третьего этапа Е6 ведения, в ходе которого ведение летательного аппарата от точки С захода на посадку в точку D приземления осуществляют, удерживая летательный аппарат на одной линии с осью взлетно-посадочной полосы. Данные места летательного аппарата, полученные после первого этапа Е4 определения места, можно отфильтровать при помощи фильтра Калмана во время этапа Е5 фильтрации, чтобы уточнить оценку места летательного аппарата перед использованием этого места для осуществления ведения летательного аппарата в ходе третьего этапа Е6 ведения.
Ниже представлен не ограничительный пример варианта осуществления первого этапа Е4 определения места. Альтернативно можно применять другие варианты осуществления, хорошо известные специалисту в данной области. Как показано на фиг. 5, первый этап Е4 определения места может включать в себя этап Е41 вычисления линии наведения, во время которого в геоцентрической системе координат определяют линию наведения летательного аппарата на точку приземления РА.
Это определение можно осуществлять на основании:
- (DL, DG, Dz) места D точки приземления, получаемого от наземной станции,
- (DH, Dv) абсциссы и ординаты точки приземления, помеченной перекрестием на изображении бортовой камеры, полученных после этапа Е3 обработки изображения, например, относительно левого верхнего угла изображения,
- (Cφ, Cθ, Cψ) углов позиционирования бортовой камеры в системе координат, привязанной к летательному аппарату,
- (CAOH, CAOV) горизонтального и вертикального углов апертуры камеры,
- (CRH, CRV) горизонтального и вертикального разрешения камеры,
- (Aφ, Aθ,Aψ) углов крена, тангажа и курсового угла летательного аппарата, выдаваемых инерциальным счетчиком текущих координат,
- AZ высоты полета летательного аппарата, выдаваемой альтиметром.
Кроме того, применяют следующие обозначения:
- Cazimut и Celevation: азимут и подъем летательного аппарата в системе координат камеры,
- RT: радиус Земли,
- Vx: вектор, связанный с линией наведения в системе координат камеры,
- Vy: вектор, связанный с 1-й нормалью к линии наведения в системе координат камеры,
- Vz: вектор, связанный с 2-й нормалью к линии наведения в системе координат камеры,
- Wx: вектор, связанный с линией наведения в геоцентрической системе координат,
- Wy: вектор, связанный с 1-й нормалью к линии наведения в геоцентрической системе координат,
- Wz: вектор, связанный с 2-й нормалью к линии наведения в геоцентрической системе координат.
В этом случае этап Е41 вычисления линии наведения может содержать следующие операции:
- определение элементарного угла, связанного с пикселем
- определение углового положения линии наведения относительно оси камеры
- определение линии наведения в системе координат камеры.
Вектор, связанный с линией наведения на точку приземления:
Вектор, связанный с первой нормалью к линии наведения на точку приземления:
Вектор, связанный со второй нормалью к линии наведения на точку приземления:
VZ = Vx ^ Vy
- построение матрицы перехода от системы координат камеры к системе координат летательного аппарата:

- построение матрицы перехода от системы координат летательного аппарата к локальной наземной системе координат точки приземления:

- построение матрицы перехода от локальной наземной системы координат точки приземления к геоцентрической наземной системе координат:

- вычисление матрицы перехода от системы координат камеры к геоцентрической системе координат:

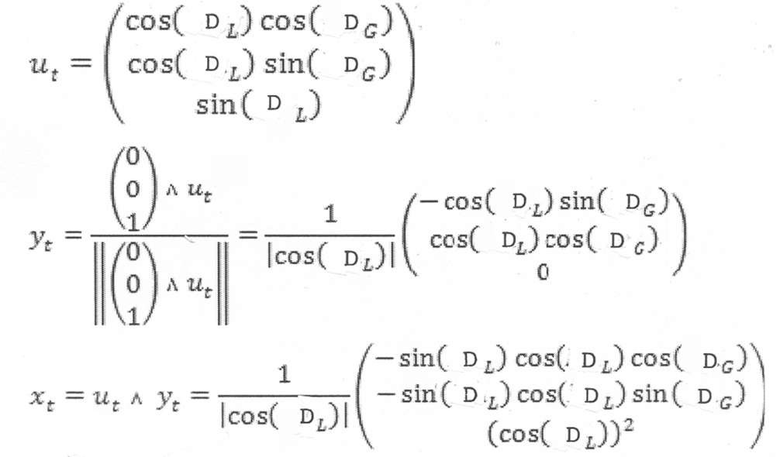
- определение линии наведения (Wx, Wy, Wz) в геоцентрической системе координат.
Вектор, связанный с линией наведения в геоцентрической системе координат:

Вектор, связанный с 1-й нормалью к линии наведения на точку приземления:

Вектор, связанный с 2-й нормалью к линии наведения на точку приземления:

Затем первый этап Е4 определения места может включать в себя этап Е42 вычисления места, в ходе которого:
- определяют уравнения:
- плоскости с нормалью ut, касательной к точке, полученной при проекции точки приземления на высоту полета летательного аппарата,
- плоскости, образованной  с нормалью
с нормалью  и проходящей через
и проходящей через  ,
,
- плоскости, образованной  с нормалью
с нормалью  и проходящей через ,
и проходящей через ,
- определяют координаты летательного аппарата в геоцентрической системе координат.
Они соответствуют точке пересечения этих трех плоскостей:
Решение Х получают путем решения линейной системы  , когда
, когда  , где
, где

Решением вышеуказанной линейной системы является: 
Широту и долготу получают следующим образом:
G = arg(x1 + ix2)
Во втором варианте осуществления изобретения, представленном на фиг. 5 и на фиг. 8, во время фазы Р2 обеспечения посадки, в ходе которой летательный аппарат ведут от точки С захода на посадку к точке D приземления, можно использовать данные расстояния между бортовым приемопередатчиком, установленным на летательном аппарате, и по меньшей мере тремя наземными приемопередатчиками. Для этого фаза Р2 обеспечения посадки может включать в себя второй этап Е7 определения места, во время которого данные места летательного аппарата оценивают при помощи данных расстояний между бортовым приемопередатчиком и указанными по меньшей мере тремя наземными приемопередатчиками. Как было указано выше, расстояние между каждым наземным приемопередатчиком и бортовым приемопередатчиком можно определить путем обмена сигналами между этими передатчиками. Поскольку место приемопередатчиков на земле известно, эту информацию о расстояниях можно использовать для минимизации погрешности в месте летательного аппарата. Факультативно при определении данных места летательного аппарата можно также использовать измерения азимута и угла подъема, передаваемые индикатором отклонения курса, если такие измерения доступны.
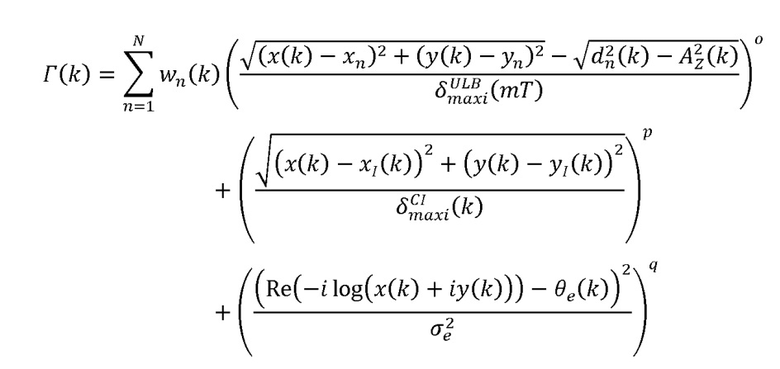
Для этого вычисление данных места с использованием измерений, передаваемых индикатором отклонения курса, и расстояний между приемопередатчиками (ER) может осуществлять модуль минимизации 16, минимизирующий функцию стоимости. Такая функция стоимости может представлять собой математическое выражение, содержащее показатели степени отклонения между расстоянием, измеренным между бортовым приемопередатчиком и наземным приемопередатчиком, и соответствующим расстоянием, вычисленным на основании места летательного аппарата и места наземного приемопередатчика, и факультативно отклонения между реальными координатами места летательного аппарата и соответствующими координатами, выдаваемыми индикатором отклонения курса. Эти показатели степени можно выбирать произвольно или выбирать таким образом, чтобы модулировать или усиливать относительное значение участия одних относительно других. При этом искомыми координатами места являются координаты, выбранные в качестве реальных координат места, минимизирующих функцию стоимости в соответствии с критерием «наименьших показателей степени». Ниже представлен пример простой функции стоимости С, не учитывающий измерение угла подъема, выдаваемое индикатором отклонения курса. Эта функция стоимости содержит, например, член С1, являющийся функцией данных расстояния между бортовым приемопередатчиком и наземными приемопередатчиками, и член С2, являющийся функцией измерения азимута, получаемого от индикатора отклонения курса.

Поскольку определение места летательного аппарата происходит дискретно, в этом примере предполагается, что его осуществляют периодически с периодом дискретизации Т. При этом в момент t = kT
где
 : Место летательного аппарата, определенное в момент mT
: Место летательного аппарата, определенное в момент mT
 : Выбранный азимут летательного аппарата относительно контрольного направления в момент mT.
: Выбранный азимут летательного аппарата относительно контрольного направления в момент mT.
 : Измеренный азимут летательного аппарата относительно контрольного направления в момент
: Измеренный азимут летательного аппарата относительно контрольного направления в момент .
.
 : Типовое отклонение ошибки измерения, допущенной индикатором отклонения курса.
: Типовое отклонение ошибки измерения, допущенной индикатором отклонения курса.
 : Место наземного приемопередатчика (ER ULB) с индексом n
: Место наземного приемопередатчика (ER ULB) с индексом n
 : Число ER ULB, развернутых на земле (
: Число ER ULB, развернутых на земле (
 : Измерение расстояния между летательным аппаратом и наземным ER ULB с индексом n в момент
: Измерение расстояния между летательным аппаратом и наземным ER ULB с индексом n в момент 
 : Максимальная ошибка расстояния, допущенная в ходе процесса измерения расстояния
: Максимальная ошибка расстояния, допущенная в ходе процесса измерения расстояния
 : 1, если измерение расстояния возможно (наземный ER находится в пределах дальности действия бортового ER), в противном случае 0.
: 1, если измерение расстояния возможно (наземный ER находится в пределах дальности действия бортового ER), в противном случае 0.
 : Оптимальные параметры, позволяющие постепенно согласовать функцию стоимости с «прямолинейным колодцем» (когда
: Оптимальные параметры, позволяющие постепенно согласовать функцию стоимости с «прямолинейным колодцем» (когда ).
).
Угол  связан с координатами
связан с координатами  следующим образом:
следующим образом:

где Re обозначает реальную часть.
Представленные в данном примере члены С1, С2 и С3 соответственно являются функциями данных расстояния, места и измерений азимута, получаемых в разные моменты mT до момента kT, для которого необходимо получить скорректированные данные места x(t), y(t). Поскольку измерения расстояния dn(mT), координаты места и измерения азимута , были уже определены или осуществлены для моментов, предшествующих t=kT, эти члены считаются известными при m<k.
Таким образом, минимизация  заключается в следующем:
заключается в следующем:
Решение получают, как указано выше, решая следующую систему уравнений, например, при помощи метода Ньютона-Рафсона:

В альтернативном варианте можно учитывать высоту над уровнем моря zn наземных приемопередатчиков и можно использовать минимизацию функции стоимости для определения высоты z(t) летательного аппарата. В этом случае функцию стоимости можно записать как:

при

В этом случае минимизация заключается в следующем:

Решение получают, как указано выше, решая следующую систему уравнений, например, при помощи метода Ньютона-Рафсона:

Скорректированные данные места (x(t), y(t)), полученные путем минимизации функции стоимости, можно отфильтровать при помощи фильтра Калмана 17, чтобы уточнить оценку места летательного аппарата до использования этого места для наведения летательного аппарата, и матрицу состояния фильтра можно адаптировать, чтобы учитывать профиль заданной траектории, которой должен следовать летательный аппарат 18.
Таким образом, предложенный способ позволяет вести летательный аппарат до точки приземления и произвести его посадку, несмотря на недоступность спутникового позиционирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2703412C2 |
| Беспилотный летательный аппарат и способ безопасной посадки беспилотного летательного аппарата | 2016 |
|
RU2712716C2 |
| КОМПЛЕКС СРЕДСТВ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2023 |
|
RU2813215C1 |
| ЖЕЛЕЗНОДОРОЖНЫЙ АЭРОДРОМНЫЙ КОМПЛЕКС ВЗЛЕТА-ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2356801C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ, В ТОМ ЧИСЛЕ БЕСПИЛОТНОГО | 2015 |
|
RU2585197C1 |
| СПОСОБ И КОМПЛЕКСНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ АВИАЦИОННЫМИ СИСТЕМАМИ НАБЛЮДЕНИЯ И НАВИГАЦИИ | 2020 |
|
RU2799550C1 |
| Способ определения положения осевой линии взлетно-посадочной полосы | 1991 |
|
SU1804629A3 |
| РАДИОМАЯК ДЛЯ ЗАХОДА И ПОСАДКИ ВЕРТОЛЕТОВ НА ОГРАНИЧЕННУЮ ПЛОЩАДКУ В ОТСУТСТВИЕ ВИДИМОСТИ ЗЕМЛИ | 1993 |
|
RU2081428C1 |
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К МЕСТУ ПРИЗЕМЛЕНИЯ И КОМПЛЕКС УСТРОЙСТВ НАЗЕМНОГО И БОРТОВОГО ОБОРУДОВАНИЯ | 1995 |
|
RU2110448C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2543144C2 |
Группа изобретений относится к способу автоматической посадки летательного аппарата (ЛА) на взлетно-посадочную полосу (ВПП), устройству обработки данных и системе обеспечения посадки. Для автоматической посадки ЛА из точки возвращения до точки приземления в фазе обратной навигации ведут ЛА из точки возвращения в направлении индикатора отклонения курса, определяют место ЛА в заранее определенной точке на одной линии с индикатором, ведут ЛА вдоль заранее определенной траектории от точки захвата до заранее определенной точки захода на посадку, в фазе обеспечения посадки ведут ЛА от точки захода на посадку до точки приземления на ВПП. Устройство обработки данных содержит альтиметр на борту ЛА, индикатор отклонения курса, расположенный на наземной станции, система обеспечения автоматической посадки ЛА содержит альтиметр, индикатор отклонения курса, устройство обработки данных. Обеспечивается надежное автономное направление летательного аппарата, такого как беспилотный аппарат, от удаленной точки возвращения до взлетно-посадочной полосы, например, взлетно-посадочной полосы аэропорта или более неровной полосы, и приземление летательного аппарата на этой полосе несмотря на недоступность системы спутникового позиционирования или GNSS. 3 н. и 16 з.п. ф-лы, 8 ил.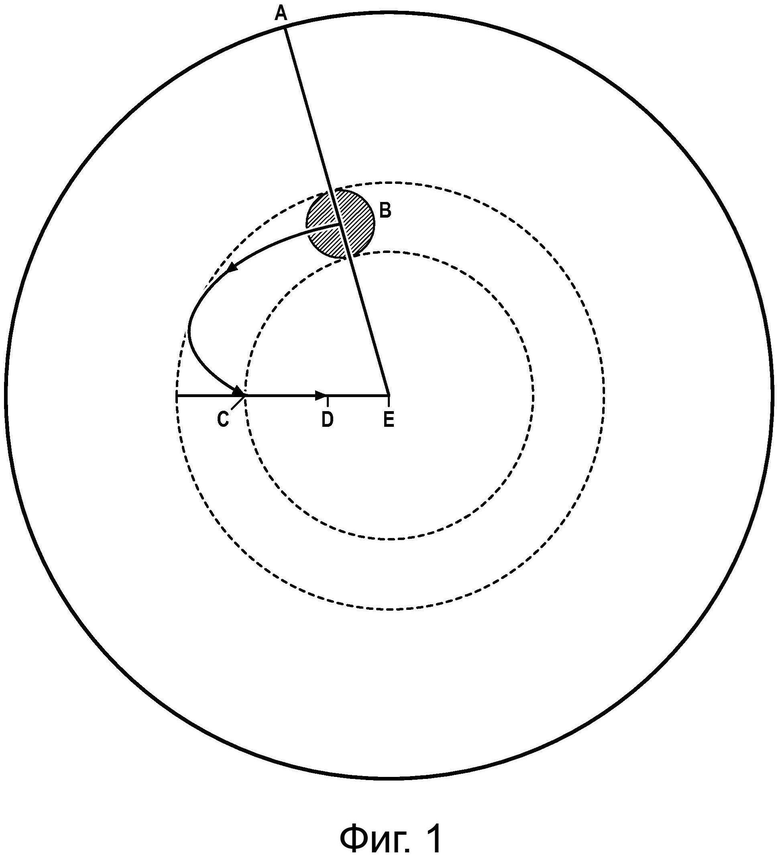
1. Способ обеспечения автоматической посадки летательного аппарата (1) на взлетно-посадочную полосу из точки (А) возвращения до точки (D) приземления, в которой летательный аппарат входит в контакт с взлетно-посадочной полосой,
характеризующийся тем, что реализуется при помощи устройства (2) обработки данных, находящегося на борту указанного летательного аппарата (1) и выполненного с возможностью соединения с:
- альтиметром (4), выполненным с возможностью измерять высоту полета летательного аппарата,
- индикатором (13) отклонения курса, расположенным на наземной станции и выполненным с возможностью измерять отклонение азимута летательного аппарата относительно контрольного направления, соединяющего указанную точку (А) возвращения и место (Е) индикатора отклонения курса,
отличающийся тем, что содержит:
- фазу (Р1) обеспечения обратной навигации, на которой:
- ведут летательный аппарат (1) из точки (А) возвращения в направлении места (Е) индикатора отклонения курса на основании измерений отклонения азимута летательного аппарата относительно указанного контрольного направления, передаваемых индикатором отклонения курса;
- определяют место летательного аппарата в заранее определенной точке (В) захвата, находящейся на одной линии с точкой (А) возвращения и с местом (Е) индикатора отклонения курса;
- ведут летательный аппарат (1) вдоль заранее определенной траектории от указанной точки (В) захвата до заранее определенной точки (С) захода на посадку, находящейся на одной линии с осью взлетно-посадочной полосы, на основании данных высоты полета, выдаваемых альтиметром (4), и данных курса и скорости летательного аппарата; и
- фазу (Р2) обеспечения посадки, на которой ведут летательный аппарат от точки (С) захода на посадку до точки (D) приземления, находящейся на взлетно-посадочной полосе.
2. Способ по п. 1, в котором место летательного аппарата в точке (В) захвата определяют на основании данных расстояния между летательным аппаратом (1) и контрольной точкой на земле, находящейся на одной линии с точкой (А) возвращения и с местом (Е) индикатора отклонения курса.
3. Способ по п. 2, в котором указанные данные расстояния оценивают на основании измерений времени распространения пакетов данных между наземной станцией и летательным аппаратом.
4. Способ по п. 3, в котором указанные данные расстояния оценивают на основании измерений времени распространения в одном направлении пакетов данных между наземной станцией и летательным аппаратом, при этом указанная наземная станция и летательный аппарат содержат синхронизированные часы.
5. Способ по п. 1, в котором при определении места летательного аппарата в точке (В) захвата выполняют оценку данных скорости указанного летательного аппарата и определяют расстояние, пройденное летательным аппаратом от точки (А) возвращения, на основании указанных данных скорости.
6. Способ по п. 5, в котором устройство (2) обработки данных выполнено с возможностью связи с оптоэлектронной системой (6), содержащей устройство (14) съемки изображений, установленное на борту летательного аппарата (1) и расположенное по оси летательного аппарата, а также устройство обработки изображения, выполненное с возможностью обработки указанных изображений, при этом данные скорости указанного летательного аппарата (1) оценивают при помощи указанной оптоэлектронной системы путем измерения скорости прохождения земли с использованием изображений, снятых указанным устройством съемки изображений, и при помощи данных высоты полета, поступающих из альтиметра (4).
7. Способ по п. 5, в котором данные скорости указанного летательного аппарата (1) оценивают путем измерения связанного с движением летательного аппарата доплеровского эффекта на сигналах, обмениваемых между летательным аппаратом и наземной станцией.
8. Способ по п. 1, в котором устройство (2) обработки данных выполнено с возможностью соединения с устройством съемки изображений, установленным на борту летательного аппарата (1), и место летательного аппарата в точке (В) захвата определяют путем обнаружения ориентира с известным положением по меньшей мере на одном изображении, снятом указанным устройством съемки изображений.
9. Способ по п. 1, в котором летательный аппарат (1) ведут между точкой (А) возвращения и точкой (В) захвата по заранее определенной прямолинейной траектории в направлении места (Е) индикатора отклонения курса.
10. Способ по п. 1, в котором летательный аппарат (1) ведут между точкой (А) возвращения и точкой (В) захвата по зигзагообразной или по ступенчатой траектории.
11. Способ по п. 1, в котором устройство (2) обработки данных выполнено также с возможностью соединения с камерой (10), установленной на летательном аппарате (1), и на фазе (Р2) обеспечения посадки оценивают (Е3) место точки (D) приземления на изображении взлетно-посадочной полосы, снятой камерой (10), и оценивают (Е4) место летательного аппарата в зависимости от указанного оценочного места точки приземления на указанном изображении и от данных высоты, выдаваемых альтиметром (4), при этом ведут летательный аппарат от точки (С) захода на посадку к точке (D) приземления, удерживая летательный аппарат на одной линии с осью взлетно-посадочной полосы.
12. Способ по п. 1, в котором устройство (2) обработки данных выполнено также с возможностью соединения с приемопередатчиком (15), установленным на борту указанного летательного аппарата (1) и предназначенным для приема сигналов, передаваемых по меньшей мере тремя приемопередатчиками, находящимися на земле, при этом на фазе (Р2) обеспечения посадки оценивают (Е7) данные места летательного аппарата на основании данных расстояния между бортовым приемопередатчиком (15) и указанными по меньшей мере тремя наземными приемопередатчиками.
13. Способ по п. 1, в котором летательный аппарат (1) ведут также на основании измерений отклонения угла подъема летательного аппарата относительно контрольной плоскости.
14. Устройство (2) обработки данных, характеризующееся тем, что выполнено с возможностью осуществления способа обеспечения автоматической посадки летательного аппарата (1) на взлетно-посадочную полосу из точки (А) возвращения до точки (D) приземления, в которой летательный аппарат входит в контакт с взлетно-посадочной полосой,
причем устройство (2) обработки данных расположено на борту указанного летательного аппарата (1) и выполнено с возможностью соединения с:
- альтиметром (4), выполненным с возможностью измерять высоту полета летательного аппарата,
- индикатором (13) отклонения курса, расположенным на наземной станции и выполненным с возможностью измерять отклонение азимута летательного аппарата относительно контрольного направления, соединяющего указанную точку (А) возвращения и место (Е) индикатора отклонения курса,
при этом указанный способ содержит:
- фазу (Р1) обеспечения обратной навигации, на которой:
- ведут летательный аппарат (1) из точки (А) возвращения в направлении места (Е) индикатора отклонения курса на основании измерений отклонения азимута летательного аппарата относительно указанного контрольного направления, передаваемых индикатором отклонения курса;
- определяют место летательного аппарата в заранее определенной точке (В) захвата, находящейся на одной линии с точкой (А) возвращения и с местом (Е) индикатора отклонения курса;
- ведут летательный аппарат (1) вдоль заранее определенной траектории от указанной точки (В) захвата до заранее определенной точки (С) захода на посадку, находящейся на одной линии с осью взлетно-посадочной полосы, на основании данных высоты полета, выдаваемых альтиметром (4), и данных курса и скорости летательного аппарата; и
- фазу (Р2) обеспечения посадки, на которой ведут летательный аппарат от точки (С) захода на посадку до точки (D) приземления, находящейся на взлетно-посадочной полосе.
15. Система (3) обеспечения автоматической посадки летательного аппарата (1) на взлетно-посадочную полосу от точки (А) возвращения до точки (D) приземления, на которой летательный аппарат входит в контакт с взлетно-посадочной полосой, содержащая:
- альтиметр (4), выполненный с возможностью измерения высоты полета летательного аппарата,
- индикатор (13) отклонения курса, расположенный на уровне наземной станции и выполненный с возможностью измерять отклонение азимута летательного аппарата относительно контрольного направления, соединяющего указанную точку (А) возвращения и место (Е) индикатора отклонения курса,
- устройство (2) обработки данных по п. 14.
16. Система (3) по п. 15, в которой индикатор (13) отклонения курса соединен с направленной антенной.
17. Система (3) по п. 15, дополнительно содержащая оптоэлектронную систему (6), содержащую устройство (14) съемки изображений, установленное на борту летательного аппарата (1) и выполненное с возможностью соединения с устройством (2) обработки данных, а также выполненную с возможностью осуществления способа по п. 6 или 8.
18. Система (3) по п. 15, дополнительно содержащая камеру (10) и соответствующее устройство обработки изображений, выполненные с возможностью соединения с устройством (2) обработки данных, а также выполненные с возможностью осуществления способа по п. 11.
19. Система (3) по п. 15, дополнительно содержащая:
- по меньшей мере три приемопередатчика, находящиеся на земле;
- приемопередатчик (15), предназначенный для приема сигналов, передаваемых указанными по меньшей мере тремя наземными приемопередатчиками, установленный на указанном летательном аппарате (1) и выполненный с возможностью соединения с устройством (2) обработки данных,
при этом указанные элементы выполнены с возможностью осуществления способа по п. 12.
| ПРЕЦИЗИОННАЯ СИСТЕМА ПОСАДКИ ДЛЯ НАВЕДЕНИЯ САМОЛЕТА ВДОЛЬ ЗАДАННОЙ ПОСАДОЧНОЙ ТРАЕКТОРИИ В ПРЕДЕЛАХ РАДИУСА ДЕЙСТВИЯ НАЗЕМНОГО ЗАПРОСЧИКА (ВАРИАНТЫ) | 1992 |
|
RU2100820C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| УСТРОЙСТВО И СПОСОБ ТРЕХМЕРНОГО ПОЗИЦИОНИРОВАНИЯ | 2011 |
|
RU2510046C2 |
| US 8265808 B2, 11.09.2012 | |||
| US 8234068 B1, 31.07.2012 | |||
| US 4454510 A1, 12.06.1984. | |||

