Область техники, к которой относится изобретение
Изобретение относится к устройствам, передвигающимся по путям, образуемым рельсами, а конкретнее, к системе, способу и компьютерному программному продукту согласно преамбулам независимых пунктов формулы.
Уровень техники
Путем в данном документе называется конструкция, обеспечивающая опору и направление для объекта, движущегося вдоль по пути. Конкретнее, путем в настоящем документе называется конструкция, образуемая по меньшей мере двумя рельсами, протяженными и проходящими параллельно друг другу в определенном направлении. Передвигающийся по пути объект обычно содержит некоторого рода механизм зацепления, например, колеса с ребордой, который позволяет продвигать объект по рельсам и удерживать движущийся объект на рельсах.
Для достижения плавного продвижения объекта вдоль по пути, размеры пути и размеры объекта должны быть согласованы друг с другом. При реализации систем путей сообщения тщательно устанавливают оптимальную совместимость пути с движущимся по этому пути объектом. Тем не менее, в процессе монтажа или эксплуатации этих систем могут появляться рассогласования элементов путей сообщения. Такие ситуации крайне нежелательны, а их устранение легко влечет за собой значительные расходы.
Определить размеры элементов путей сообщения относительно несложно для небольших элементов, не подвергающихся воздействию значительных сил. Однако рельсовые пути используются также в крупногабаритных системах, несущих и перемещающих значительные нагрузки, а для них даже изначальное определение размеров элементов пути сообщения является сложной задачей. Например, в мостовых кранах порядок поперечного размера крана составляет нескольких метров или десятков метров, при том, что порядок поперечного размера рельса составляет сантиметры. Кроме того, мостовой кран несет очень большие нагрузки, поэтому его размеры могут быть разными для состояний под нагрузкой и без нагрузки. Также следует учитывать и то, что кран может сильно качаться. Вариации размеров самого моста могут быть относительно точно оценены и предвидены, но вариации размеров пути очень сложно контролировать и администрировать. Ко всему прочему мостовые краны являются поднятыми конструкциями, поэтому рельсы обычно проходят на возвышении. Любые работы по монтажу и обслуживанию на таких высотах затруднительны сами по себе. В большинстве случаев рельсы также собираются не тем подрядчиком, который изготовил мостовой кран, поэтому реально совместимость элементов пути сообщения может быть проверена только после полного монтажа этих двух элементов пути сообщения.
С другой стороны, даже если при монтаже достигается великолепное согласование, эта ситуация может измениться в процессе эксплуатации. Рельсы обычно крепятся на фундаменте, например, на бетонной, стальной или аналогичной конструкции. Если по какой-либо причине случаются перемещения этого фундамента (подвижки земли, землетрясение, проблемы с материалом), то рельсы также смещаются и размеры пути изменяются. Также и сам путь может портиться или разрушаться в процессе эксплуатации. Например, может ослабнуть болтовое крепление на рельсовых стыках, приведя к деформации рельса и, следовательно, всего пути в целом.
Все эти причины могут приводить к потере совместимости между путем и мостом, что может иметь очень серьезные последствия. Прежде всего, при использовании несовместимых элементов пути сообщения, входящие в зацепление элементы трутся друг об друга, вызывая снашивание деталей. Замена деталей элементов тяжелого типа, например мостов крана, очень дорогостояща и приводит к нарушению производственного процесса, в котором применяется путь сообщения. Кроме того, в некоторых прогрессивных применениях путей сообщения продвижение объекта контролируется измерениями и логикой управления приводом, основанных на ожидаемой поперечной размерной совместимости элементов пути сообщения. Когда эта совместимость начинает ухудшаться, логика управления приводом может начать ошибаться или по меньшей мере не работать нормально.
Для того, чтобы избежать этих недостатков, прилагаются большие усилия для контроля размерной совместимости пути и движущегося вдоль по нему устройства. Особенно для тяжелых крановых систем, экономия, как за счет сокращения простоев, так и за счет сокращения расходов на техобслуживание, может быть значительной, если тщательно контролировать текущую совместимость элементов пути сообщения. На практике, однако, контроль систем такого типа чрезвычайно сложен. Традиционно контроль совместимости в основном сводился к контролю пути, то есть к контролю состояния и размеров пути. Контроль пути зачастую проводится визуально, либо работником техобслуживания, обходящего поднятый путь и наблюдая его состояние, возможно, с регистрацией на камеру.
Такие визуальные наблюдения неточны, и на время их проведения приходится останавливать работу на пути и/или производственном участке, на котором используется устройство. Этот способ также трудозатратен и рискован, поэтому, на деле интервалы между такими событиями осмотров имеют склонность удлиняться.
В некоторых усовершенствованных решениях, вдоль пути, измеряя его размеры, движется отдельный модуль. В некоторых решениях отдельный модуль может прикрепляться к мосту и двигаться перед мостом, собирая на своем пути измеренные данные. В других системах отдельный модуль является мобильным устройством с возможностью дистанционного управления, движущимся вдоль пути и в процессе своего движения регистрирующим измеренные данные. Эти системы замеров путей по сравнению с визуальными наблюдениями дают более точную информацию, но требуют отдельно движущихся измерительных единиц и прерывания штатной работы мостового крана. Кроме того, они дают информацию о совместимости элементов пути сообщения только в условиях отсутствия нагрузки. Эта совместимость во многих случаях может значительно изменяться, когда начинает действовать нагрузка и начинаются перемещения моста в результате работающей от переменного привода нагрузки. Простых измерений пути становится недостаточно; требуется более глобальный взгляд на взаимодействие элементов пути сообщения.
Раскрытие изобретения
Задача изобретения, таким образом, состоит в предложении способа и устройства улучшенного контроля совместимости устройства и образуемого рельсами пути, вдоль по которому движется устройство. Задачи изобретения решаются системой, способом и компьютерным программным продуктом, отличительные признаки которых изложены в независимых пунктах формулы. Конкретные варианты осуществления изобретения раскрыты в зависимых пунктах, а также в нижеследующем подробном описании с сопроводительными чертежами.
В вариантах изобретения применяют устройство, выполненное с возможностью движения вдоль по образуемому рельсами пути, и управляющий блок, функционально соединенный с этим устройством. Сигналы, получаемые от расположенных на противоположных сторонах устройства детекторов с согласующимися метками времени при работе устройства подают в управляющий блок, где их используют для генерирования показателя, представляющего собой текущую размерную совместимость устройства и пути. Наличие такого текущего показателя и возможности непрерывного сбора исторических данных в различных рабочих условиях являет собой эффективный инструмент усовершенствованного контроля эксплуатационной совместимости элементов пути сообщения в процессе использования.
В контексте настоящего изобретения термин «текущая размерная совместимость» следует понимать так, что «текущая» относится ко времени исключительно как к косвенному параметру: например, когда идет сбор измерений, время может играть только роль связки между позицией крана (как функцией времени) и размерной совместимостью (как функцией времени, когда собирались измерения), в результате чего можно определить размерную совместимость (как функцию позиции крана). С другой стороны, когда измерения используются в реальном масштабе времени для минимизации трения между ребордами колес и рельсами, «текущая размерная совместимость» означает «размерная совместимость в позиции, в которую движется кран». Говоря короче, в конце концов, требуется информация о размерной совместимости, то есть совместимости размеров путей с колесами (конкретнее, с ребордами колес) в разнообразных местоположениях, и время может служить промежуточной переменной для обеспечения связи между:
1. Информацией о размерной совместимости в различных местоположениях, где кран выполнил измерения; и
2. Информацией о размерной совместимости в местоположении, в которое движется кран.
В других вариантах осуществления изобретения имеются и другие преимущества, рассматриваемые детальнее вместе с соответствующими подробными описаниями осуществления.
Краткое описание чертежей
Далее по тексту изобретение описывается подробнее в предпочтительных вариантах осуществления со ссылкой на прилагаемые чертежи, на которых:
На Фиг.1 показан вид сверху осуществления устройства;
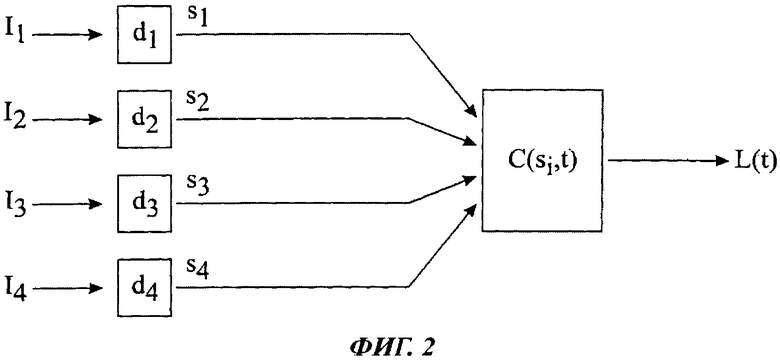
На Фиг.2 проиллюстрировано взаимодействие элементов системы;
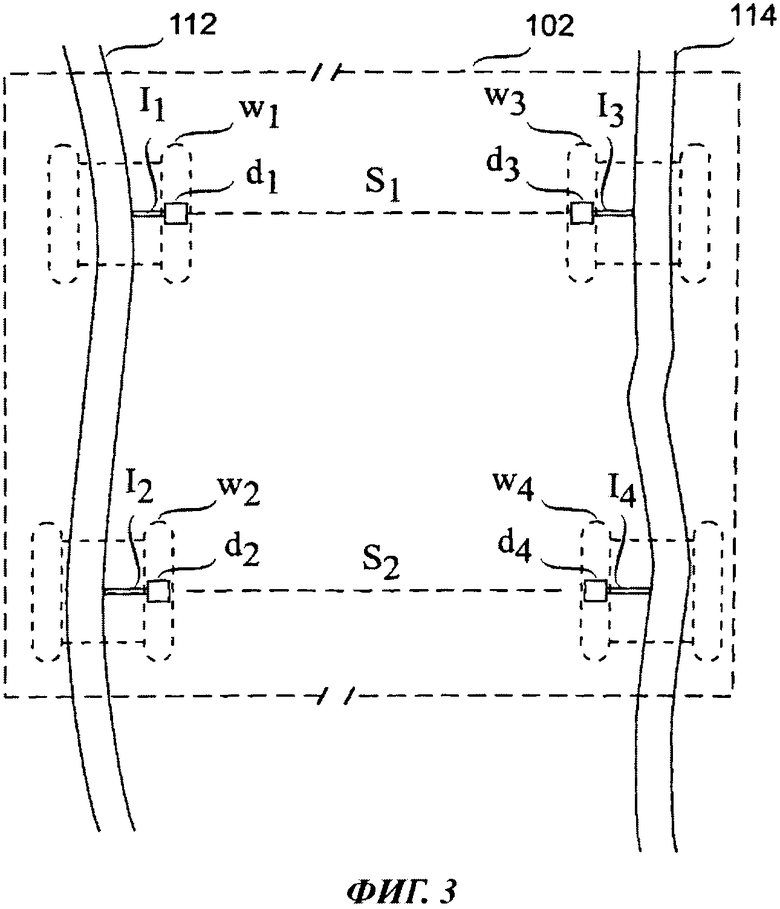
На Фиг.3 показана блок-схема, иллюстрирующая пример генерирования показателя, представляющего собой текущую размерную совместимость устройства и пути в конфигурациях по Фиг.1 и Фиг.2.
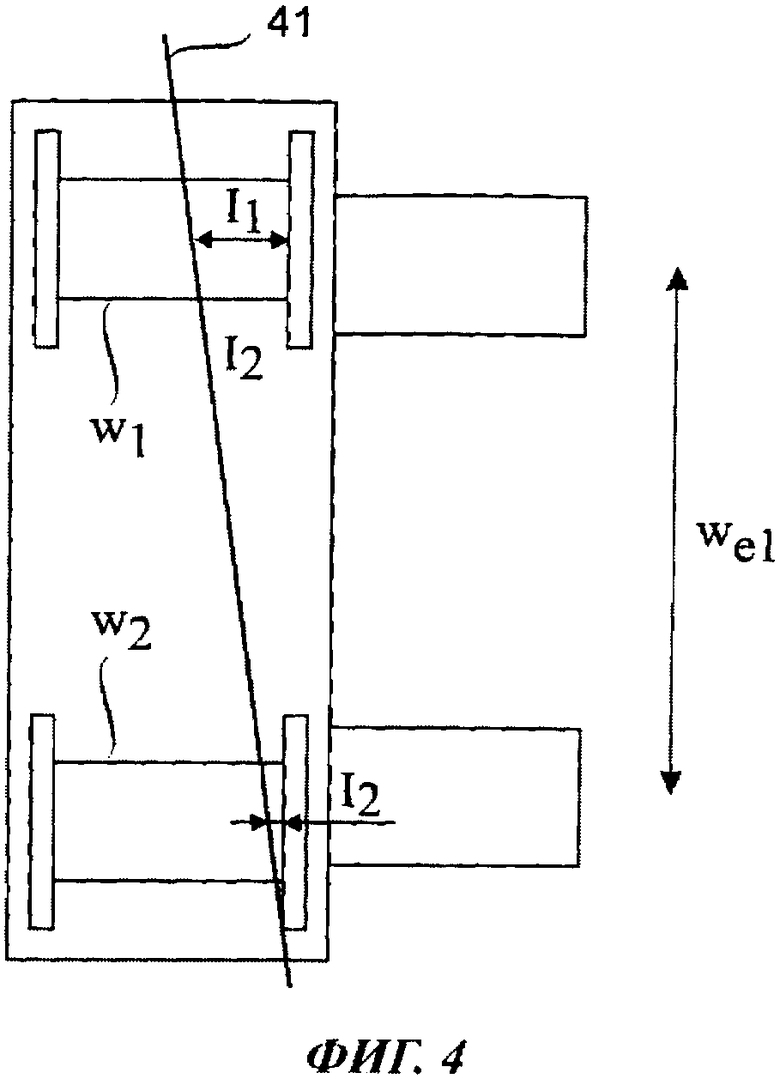
На Фиг.4 проиллюстрировано определение значения перекоса на торце устройства;
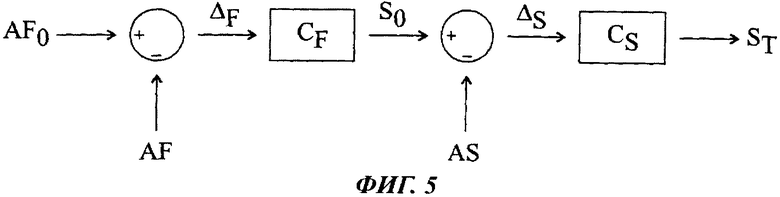
На Фиг.5 приведена схема управления для генерирования одного или более управляющих сигналов для логики операционной системы, управляющей двигательными приводами колес; и
На Фиг.6 показаны этапы способа, выполняемого управляющим блоком устройства по Фиг.1.
Осуществление изобретения
Описываемые ниже осуществления приведены в качестве примеров. Хотя в спецификации «какое-либо», «одно» или «некоторое» осуществление (- я) может (могут) упоминаться в нескольких местах, это не обязательно означает, что каждое из этих упоминаний относится к одному и тому же варианту осуществления, или то, то указанный отличительный признак относится только к единственному варианту осуществления. Единичные отличительные признаки различных вариантов осуществлений могут быть скомбинированы с целью предложения других вариантов осуществления. Различные варианты осуществления будут описаны с использованием примера архитектуры системы, однако без ограничения изобретения раскрываемыми терминами и конструкциями.
На Фиг.1 показана конструкция из взаимосвязанных функциональных единиц в осуществлении системы 100 контроля рельсового пути. Фиг.1 является упрощенной схемой архитектуры системы, на которой показаны только элементы и функциональные единицы, необходимые для описания реализации изобретения в настоящем варианте осуществления. Специалистам в данной области техники понятно, что измерительные системы могут содержать другие конструкции, явным образом не показанные на Фиг.1. Показанные на иллюстрации функциональные единицы представляют собой логические блоки и связи, которые могут иметь различные физические реализации, обычно известные специалистам в данной области техники. В целом, необходимо отметить, что некоторые функции, конструкции и элементы, использованные для создания контекста раскрываемых осуществлений, сами по себе могут не иметь отношения к подлинному изобретению. Слова и выражения в нижеследующих описаниях призваны иллюстрировать, но не ограничивать изобретение или осуществление.
Усовершенствованная система 100 контроля согласно изобретению содержит устройство, выполненное с возможностью движения на колесах вдоль по пути, образованному рельсами 112, 114. Примером такого устройства является мостовой кран 102, вид сверху которого показан на Фиг.1. Устройство содержит корпус, две противоположные стороны которого стоят на двух или нескольких колесах. В некоторых устройствах, например, в изображенном на Фиг.1 мостовом кране 102, корпус содержит удлиненный элемент с первым торцом e1 и вторым торцом е2, причем первый торец e1 соответствует одной стороне, а второй торец е2 - противоположной стороне устройства. Каждый из этих торцов e1, e2 прикреплен по меньшей мере к двум последовательным колесам w1, w2, w3, w4. Колеса на торцах e1, e2 скомпонованы таким образом, что когда два колеса w1, w2 торца e1 катятся друг за другом по одному рельсу 112, то торец 112 движется по рельсу 112 в направлении 130 пути. Следовательно, когда торцы e1, e2 продвигаются по своим соответствующим рельсам 112, 114, корпус устройства 102 движется вдоль по пути, образованному этими рельсами 112, 114.
Мостовой кран 102 обычно содержит тележку 116, которую можно двигать на колесах 118, 120, 122, 124 вдоль по рельсам 126, 128 кранового моста. Колеса w1, w2, w3, w4 крана и колеса 118, 120, 122, 124 тележки подсоединены к приводной системе (не показана), посредством которой достигается точное управление скоростью крана и тележки. В типовых реализациях каждое колесо w1, w2, w3, w4 или каждая пара колес (w1, w2) и (w3, w4) колес имеют выделенный двигатель с подсоединенным к нему выделенным двигательным приводом. Двигательные приводы управляются логикой управления приводом по запрограммированным алгоритмам управления и по управляющим командам, получаемым от системы управления мостового крана.
В настоящем варианте осуществления системы контроля рельсового пути оба торца e1, е2 крана были оснащены по меньшей мере двумя последовательными детекторами d1, d2 и d3, d4. В настоящем документе детектором называется устройство, измеряющее физическую величину и преобразующее ее в электрический сигнал, который может быть считан другим электрическим устройством. В настоящем варианте осуществления детекторы измеряют поперечное расстояние от себя до рельса. Для рельса, проходящего в определенном направлении, поперечным направлением в данном документе называется направление, перпендикулярное направлению прохождения рельса. В качестве детекторов могут применяться близкодействующие датчики расстояния или триангуляционные лазерные датчики. Каждый из этих детекторов находится в пространственном взаиморасположении с одним из колес, так что сигнал, сгенерированный детектором d1, d2 и d3, d4, соответствует поперечному расстоянию l1, l2, l3, l4 конкретной части колеса w1, w2, w3, w4, с которым находится во взаиморасположении детектор от соответствующего рельса 112, 114 на момент выполнения измерения.
Отметим, что Фиг.1 является блок-схемой, предназначенной для иллюстрации относящихся к осуществлению элементов, но не для строгого размерного представления архитектуры устройства. Для того чтобы четче показать относящиеся к рассматриваемому вопросу функциональные единицы и расстояния, детекторы d1, d2 и d3, d4 на Фиг.1 показаны как отдельно фиксированные элементы за пределами торца моста. В фактических осуществлениях детекторы действительно могут быть собраны на парах направляющих роликов (не показаны), катящихся спереди и сзади торцов моста и обеспечивающих нахождение моста на рельсах. Однако продольная позиция (позиция в направлении пути) детекторов относительно их рельса сама по себе не имеет отношения к данному вопросу.
Позиции детектора и колеса, тем не менее, должны находиться в фиксированном пространственном взаиморасположении, чтобы сигнал, сгенерированный детектором в определенный момент времени, представлял собой поперечное расстояние конкретной части соответствующего колеса от рельса в этот же момент времени. Таким образом, если расстояние между детектором и конкретной частью относящегося к нему колеса неизменно и известно, это известное расстояние всегда может быть рассмотрено вместе с измеренными детектором расстояниями для определения изменяющегося поперечного расстояния от рельса конкретной части соответствующего колеса.
Кроме того, устройство собрано таким образом, что в процессе движения устройства колеса вращаются в фиксированных поперечных позициях относительно устройства. Благодаря фиксированному пространственному взаиморасположению между колесами и детекторами, когда устройство продвигается вдоль по пути, детекторы продвигаются вдоль по пути соответственно. Система содержит средство для регистрации продвижения конкретной части устройства вдоль по пути таким образом, что генерируется запись, хранящая позиции конкретной части устройства на пути как функцию времени. Это означает, что по меньшей мере на все время измерения поперечного расстояния конкретной части колеса от рельса, позиция устройства и, следовательно, позиция колес и детекторов на пути точно известна и доступна управляющему блоку. Поэтому, с помощью записи генерируемый детектором сигнал может быть легко привязан к конкретной позиции по длине пути, в которой было измерено поперечное расстояние конкретной части колеса от рельса.
Отметим, что определение позиций выполнения измерений может быть реализовано различными путями. Одной из возможностей является запись продвижения устройства вдоль по пути и использование записанной информации для привязки расстояния, измеренного в конкретный момент времени, к расстоянию, измеренному в конкретной позиции по длине пути. Использующий такой подход вариант осуществления описывается далее по тексту. Однако отметим, что в пределах объема правовой охраны изобретения могут применяться и другие способы привязки измеренных поперечных расстояний к позициям на пути. Например, детекторы могут быть выполнены с возможностью выполнения измерений в заданных позициях или через заданные отрезки рельсового пути, что позволит не выполнять синхронизации сигналов. Такие варианты выполнения измерений очевидны для специалистов в данной области техники.
Например, предположим, что запись хранит позиции конкретной части устройства по длине пути в виде расстояний до неизменной контрольной позиции и связывает позиции со временем, когда конкретная часть устройства прошла данную позицию. Когда от конкретного детектора приходит сигнал и управляющему блоку известно время, когда этот детектор выполнил измерение, ему просто надо использовать запись для привязки времени выполнения детектором измерения к конкретному положению вдоль пути конкретной части устройства. Имея фиксированное расстояние между детектором и конкретной частью устройства, управляющий блок может найти на пути позицию выполнения измерения как сумму найденной конкретной позиции конкретной части устройства по длине пути и фиксированного расстояния между детектором и конкретной частью устройства.
Для генерирования записи, по меньшей мере одно из колес w1, w2, w3, w4 можно оборудовать счетчиком оборотов (не показан), подключенным к блоку управления и начинающим отсчет в заданной контрольной позиции по длине пути на рельсе. Управляющий блок может напрямую привязать число отсчетов счетчика оборотов колеса к расстоянию от контрольной позиции, так как один отсчет соответствует длине окружности контактирующей с рельсом части колеса. В пределах объема правовой охраны изобретения могут быть употреблены другие средства отслеживания позиции по меньшей мере одного колеса устройства. Например, устройство может содержать конкретное измерительное устройство, такое как лазерное, допплеровское или радиочастотное измерительное устройство, измеряющее расстояние от себя до контрольной позиции на одном из концов пути и сообщающее измеренное расстояние блоку управления. Также могут использоваться другие системы позиционирования, использующие другие контрольные точки, например, система GPS (Global Positioning System - Спутниковая навигационная система).
Детекторы d1, d2 и d3, d4 находятся в функциональном соединении с управляющим блоком 140. Функциональное соединение в настоящем документе означает конфигурацию, в которой детекторы подключены к управляющему блоку 140, сигналы, генерируемые детекторами в процессе работы устройства, подаются в управляющий блок, а управляющий блок выполнен с возможностью систематического выполнения операций с полученными сигналами согласно предустановленным процессам, обычно - запрограммированным процессам. Эти процессы могут быть реализованы в аппаратных электросхемах или в электросхемах специального назначения, в программном обеспечении, логических схемах или в сочетаниях вышеперечисленного. Некоторые аспекты процессов могут быть реализованы аппаратно, а некоторые аспекты могут быть реализованы программно-аппаратно или программно с выполнением их контроллером, микропроцессором или другим вычислительным устройством. Программы программного обеспечения для исполнения могут быть названы программными продуктами и могут представлять собой изделия, которые могут храниться в любом машиночитаемом носителе информации.
Фиг.2 иллюстрирует действия взаимосвязанных элементов системы. Как обсуждалось выше, в процессе работы системы каждый из детекторов d1, d2 и d3, d4 пространственно сопоставлен с конкретным колесом устройства. Когда устройство движется, детекторы генерируют сигналы s1, s2, s3, s4. Сигнал от детектора соответственно представляет собой поперечное расстояние конкретной части сопоставленного колеса от рельса в момент генерирования сигнала, то есть в момент выполнения измерения. Когда управляющий блок получает сигнал S1, он связывает его с идентификационными данными, представляющими собой конкретную позицию по длине пути, где было измерено поперечное расстояние конкретной части колеса от рельса.
В настоящем примере для того, чтобы связать сигнал с конкретной позицией по длине пути, управляющий блок С связывает полученный сигнал Si с меткой времени ti. Детекторы могут быть выполнены с возможностью непрерывного или периодического генерирования сигналов. Обычно маршрут доставки от детектора до управляющего блока очень быстр, поэтому промежуток между временем генерирования сигнала и временем получения сигнала незначителен, и управляющий блок может связать сигнал со временем его получения и правомерно считать метку времени соответствующей конкретному времени, в которое было измерено поперечное расстояние.
Тем не менее, в зависимости от размеров системы и/или расстояний между элементами, конфигурация системы может естественно включать в себя дополнительные средства устранения задержек в передаче сигнала между детектором и управляющим блоком. Например, в некоторых реализациях, контроль пути может реализовываться дистанционно по показаниям детекторов, передаваемым устройством по коммуникационной сети. В таких реализациях детекторы могут быть более усовершенствованными детекторными системами, которые содержат таймер и генерируют сигналы, несущие результат измерений, а также записанное или рассчитанное время измерения. Соответственно управляющему блоку надо связать получаемые от таких детекторных систем сигналы с меткой времени, извлекаемой из самого сигнала, а не со временем приема сигнала. Этим обеспечивается соответствие показаний детектора конкретным текущим поперечным расстояниям, делая их пригодными для дальнейшей обработки.
Процессы управляющего блока содержат функцию C(si,T), в процессе работы работающую на группе сигналов si=(s1, s2, s3, s4), отдельно поступающей потоком от детекторов d1, d2 и d3, d4. Благодаря функциональному соединению между управляющим блоком и детекторами, управляющий блок способен идентифицировать, от какого именно детектора исходит каждый полученный сигнал, то есть привязать данные измерений от являющегося источником детектора - к соответствующему измеренному поперечному расстоянию l1, l2, l3, l4 от рельса его сопоставленного колеса. Кроме того, управляющий блок привязывает сигнал к конкретной позиции по длине пути.
В данном варианте осуществления управляющий блок извлекает и комбинирует по меньшей мере два сигнала от детекторов, расположенных на противоположных торцах e1, e2 устройства и имеющих согласующуюся метку времени. Согласование меток времени обычно означает, что метки времени t1, t2, t3, t4, связанные с сигналами s1, s2, s3, s4 находятся в пределах временного интервала Tmeas (t1, t2, t3, t4 ∈Tmeas). Когда временной интервал Tmeas задается коротким, в пределах миллисекунд (например, 30 мс), сигналы и, следовательно, поперечные расстояния l1, l2, l3, l4, переносимые в сигналах, могут правомерно считаться совпадающими во времени. Совпадение сигналов во времени в настоящем документе означает, что в момент времени Tmeas известны позиции являющихся источниками детекторов относительно друг друга и относительно сопоставленных с ними колес, а позиция детекторов по длине пути доступна управляющему блоку. То есть управляющий блок может использовать эти совпадающие во времени сигналы на противоположных торцах устройства и на их основе сгенерировать показатель L(t), представляющий собой текущую размерную совместимость устройства и пути в данной позиции.
На Фиг.3 показана блок-схема, иллюстрирующая генерирование показателя L(t) согласно конфигурации вариантов осуществления, показанных на Фиг.1 и Фиг.2. Во всех возможных случаях применены одинаковые позиционные номера. Отметим, что Фиг.3 предназначена для иллюстрирования релевантных элементов, поэтому размеры конфигурации приведены не в масштабе и частично преувеличены. Фиг.3 изображает устройство 102, движущееся по пути, образованному рельсами 112, 114. В идеальном случае рельсы являются прямоугольными, но на практике рельсы могут содержать деформации и дефекты, которые к тому же могут изменяться со временем. Колеса w1, w2, w3, w4 устройства 102 обычно формируются с одним или двумя удерживающими элементами, физически взаимодействующими с рельсом для удержания на нем вращающегося колеса. В варианте осуществления по Фиг.3 колеса имеют по меньшей мере одну круглую реборду, плоскость круга которой проходит вертикально от наружного периметра колеса для предотвращения поперечного движения колеса за точку контакта с рельсом. В реальных работающих системах значительное количество контактов реборд с рельсом происходит из-за дефектов и деформации рельсов. Такие контакты крайне нежелательны, так как они вызывают значительный износ и приводят к сокращению срока службы колес. Замена колес на уже смонтированном мостовом кране является трудозатратной и дорогой операцией, каждый раз требующей остановки работы крана на обслуживание. Всех этих недостатков следует эффективно избегать.
В некоторых существующих реализациях контролировали расстояния l1 и l2, a их взаимное отношение использовали для управления двигательными приводами колес w1, w2, w3, w4 для обеспечения движения кранового моста прямолинейно и посередине рельсов 112, 114. Однако как можно видеть по Фиг.3, одни такие управляющие действия могли бы помочь избежать контактов реборд колес W1, W2 с рельсами только на первом торце e1. При этом, в отсутствии какой-либо информации о размерах рельсов на другом торце е2, управляющее действие не может значительно улучшить ситуацию контакта реборд колес w3, w4. Очевидно, что если случается сильная остроугольная деформация рельса, то управляющие действия на основе измерений на первом торце e1 могут даже ухудшить ситуацию, приведя к притягиванию колес Ws, W4 к рельсу 114 или даже сталкиванию колес w3, w4 на другом торце е2 за рельс 114.
Для того, чтобы избежать таких ситуаций, в варианте осуществления по Фиг.3 сигналы от детекторов d1, d2 на одной стороне устройства и от детекторов d3, d4 на противоположной стороне устройства 102 контролируют, регистрируют и используют в комбинации для генерирования показателя L(t) представляющего собой текущую размерную совместимость устройства и всего образуемого обоими рельсами пути. Благодаря конфигурации системы детекторы могут функционировать в ходе нормальной эксплуатации устройства и создавать информацию в ситуациях под нагрузкой и без нагрузки. Соответственно, сгенерированный показатель L(t), полезен и для работающей системы и/или для оператора, а также для системы оперативного администрирования (такой как Crane Management System (CRM), Система Управления Краном для кранового моста) устройства.
Например, в случае Фиг.3, управляющий блок может использовать расстояния l1, l2, l3, l4 на обоих торцах мостового крана для вычисления одного или нескольких показателей, представляющих собой текущие размеры пути. Здесь управляющий блок может вычислить значение S1, представляющее собой ширину колеи моста в передней части кранового моста. S1 может быть рассчитана по поперечным расстояниям l1, l3, измеренным детекторами d1, d3 на противоположных торцах e1, e2 крана. Аналогичным образом может быть рассчитана величина S2, представляющая собой ширину колеи моста в задней части крана, по поперечным расстояниям l2, l4, измеренным детекторами d2, d4 на противоположных торцах e1, e2 крана. Сгенерированные показатели S1 и S2 ширины колеи моста могут быть напрямую сравнены с размерами устройства, то есть с известными расстояниями между колесами w1, w2, и w2, w4.
В другом примере управляющий блок может компилировать все измеренные расстояния l1, l2, l3, l4 для того, чтобы сгенерировать комбинированный показатель ребордных расстояний всех колес в один момент времени. Комбинация расстояний спереди и сзади на обеих сторонах крана представляет собой тотальную совместимость крана с ходовыми рельсами. Так как рельсы изначально оптимизированы относительно размеров крана, комбинация отклонений от размеров крана непосредственно представляет собой текущие и поперечные отклонения пути.
Отметим, что изобретение не ограничивается этими примерами показателей. Другие поперечные размеры рельсов могут использоваться в качестве показателей в пределах объема правовой охраны изобретения.
Поперечная и текущая информация о размерах пути очень важна для эффективности системы администрирования устройства. Когда совместимость устройства и рельса контролируется непрерывно, отклонения можно обнаруживать на ранних этапах и организовывать профилактические и корректирующие мероприятия гораздо раньше, чем это было до этого. Таким способом можно предотвратить развитие ситуаций, требующих остановок на обслуживание. Например, в случае крановых мостов, благодаря изобретенному решению можно легко удвоить или утроить срок службы колес, соответственно увеличив интервалы между дорогостоящими простоями для замены колес.
Непрерывный контроль также упрощает сбор исторических данных, которые могут быть применены в анализе проблем или трендов, ведущих к возникновению проблем. Значения можно измерять с нагруженной тележкой и с разгруженной тележкой, и с различными ее позициями, что позволяет точнее оценивать причины возникновения любых найденных отклонений. Например, система может быть использована, чтобы вычислить для пути набор значений поперечного размера (например, ширины колеи пути) в заданных эксплуатационных условиях, а преобладающие эксплуатационные условия могут быть зарегистрированы вместе с вычисленными значениями. Эксплуатационные условия могут относиться, например, к следующему:
- расположение детектора/устройства по длине пути
- измерения без нагрузки и/или с заданной нагрузкой
- различные схемы привода
- позиции тележки
- скорость ветра
- окружающая температура, влажность.
Когда одинаковые измерения производят позднее в эксплуатационных условиях, которые по меньшей мере частично одинаковы с предыдущими, то более ранние значения обеспечивают базу для исторических данных, с которыми можно сравнивать новые результаты. Обнаруженные отклонения новых значений от более ранних значений могут интерпретироваться для представления поступательных изменений размеров пути и планирования инспекций и возможных действий по ремонту и обслуживанию. Исторические данные по измеряемому размеру, обнаруженные отклонения и информация по преобладающим условиям образуют обширную базу данных, которую можно обрабатывать для обнаружения трендов или/или случайностей между изменяющимися значениям, и таким образом анализировать основополагающие причины приближающихся проблем. Благодаря осуществлению изобретения, потенциальных проблем, связанных с определением размеров, можно избежать или по меньшей мере можно обнаружить их и предпринять устраняющие действия гораздо заранее проявления каких-либо повреждающих результатов несовместимости между колесами и рельсами.
Распределенная конфигурация также способствует дистанционному контролю элементов пути сообщения, благодаря которому изготовитель крана может предлагать профессиональную поддержку в виде системы длительного сервиса. Этим гарантируются точные и своевременные корректирующие действия, так как профессионалы, проектирующие крановые системы, обычно обладают самыми глубокими знаниями об их поведении и характеристиках. Кроме того, истории эксплуатации большого числа установленных кранов могут накапливаться и использоваться для тщательного и упреждающего анализа проблем совместимости внутри системы.
Поперечная и текущая информация о размерах пути в сравнении с размерами устройства может также подаваться в логику управления приводом устройства. Логика управления приводом может применять генерируемый текущий показатель в качестве дополнительного параметра в управлении двигательными приводами колес. Например, сгенерированный показатель может находить определенную позицию на пути, в которой рельсы деформированы по тому, что ширина колеи колес шире изначально запроектированной. Для минимизации последствий ребордных контактов на таком участке пути, двигательные приводы могут быть отрегулированы на замедление движения при прохождении устройством данного участка. Кроме того, двигательными приводами можно управлять по логике, оптимизирующей колесный привод для достижения минимального ребордного контакта всех четырех колес. Этот показатель можно также использовать для включения тревоги, если будет решено, что размеры устройства и пути отклоняются в чрезмерной степени. В настоящем документе логика управления приводом является логическим блоком, который может быть реализован в виде процедур в управляющем блоке или в приводном блоке, являющемся отдельной операционной системой, но находящемся в функциональном соединении с управляющим блоком, или в виде комбинации процедур управляющего блока и одного или нескольких отдельных вычислительных блоков операционной системы.
В качестве простого примера рассмотрим алгоритм администрирования двигательных приводов по текущей поперечной совместимости устройства с рельсами рельсов на противоположных сторонах устройства, изображенного на Фиг.3. В показанном на Фиг.3 сценарии кран движется вверх по чертежу. Как было обсуждено выше, управляющий блок имеет генерированные показатели l1, l2, l3, l4 ребордных расстояний всех колес w1, w2, w3, w4 в заданной позиции по длине пути. Предположим, что при продвижении вдоль по пути расстояния колес от своих рельсов составляют: l1=5 мм, l2=8 мм, l3=28 мм и l4=32 мм. На практике это означает, что реборды колес w1, w2 уже находятся очень близко к рельсу, и необходимо предпринять некоторое корректирующее действие. Логика, оптимизирующая привод колес, анализирует комбинацию значений l1, l2, l3, l4 и решает подвинуть устройство к рельсу 114 на 7 мм. Это можно реализовать, сначала замедлив вращение колес w3, w4 по сравнению с вращением колес w1, w2 так, что устройство немного перекосится относительно пути. При этом расстояния колес w1, w2 до рельса 112 уменьшатся, а расстояния колес w3, w4 до рельса 114 увеличатся. После достижения требуемого увеличения/уменьшения, вращение колес w1, w2 по сравнению с вращением колес w3, w4 замедляют, так что устройство выравнивается относительно пути. После корректирующей подвижки расстояния от колес до рельсов станут равными l1=12 мм, l2=15 мм, l3=21 мм и l4=25 мм, что обеспечит хорошее взаимодействие устройства с рельсами.
В качестве еще одного примера рассматривается более усовершенствованный алгоритм администрирования двигательных приводов по поперечным расстояниям на противоположных сторонах устройства по Фиг.3. В этом алгоритме управляющий блок по значениям l1, l2 рассчитывает значение Fe1=(l1+l2)/2 для реборды первого торца, представляющее текущую поперечную совместимость колес на первом торце e1 с ходовым рельсом 112, а затем по значениям l3, l4 рассчитывает значение ребордного расстояния Fe2=(l3+l4)/2 для реборды второго торца, представляющее текущую поперечную совместимость колес с ходовым рельсом 114 на втором торце е2.
Кроме того, управляющий блок по значениям l1, l2 вычисляет значение перекоса Se1=(l1-l2)/We1 для первого торца, а по значениям l3, l4 вычисляет значение перекоса Se2=(l3-l4)/We2 для второго торца. На Фиг.4 проиллюстрирована нахождение значения торцевого перекоса с размерами первого торца e1. Линией 41 показана внутренняя кромка рельса 112, по которому катится первый торец e1, а линия we1 соединяет соответствующие поперечные контрольные точки колес w1, w2. Длина We1 соответствует расстоянию между колесами w1, w2 (в целом, We1=We2). Можно видеть, что чем больше разница между значениями l1 и l2, тем больше линия We1 отклоняется от внутренней кромки рельса 112 и, следовательно, больше значение Se1 текущего перекоса.
Значения ребордных расстояний Fe1 и Fe2 противоположных торцов e1, e2 затем используют для вычисления значения AF=(Fe1+Fe2)/2 ребордного расстояния устройства. Аналогичным образом, текущие значения Se1 и Se2 перекоса на первом и втором торцах можно использовать для расчета текущего значения AS=(Se1+Se2)/2 перекоса устройства.
На Фиг.5 показана схема управления, представляющая собой процедуру генерирования одного или нескольких управляющих сигналов для подачи в логику операционной системы, управляющей двигательными приводами колес устройства. В начале вычисления управляющий блок имеет уставку AF0, соответствующую требуемому значению ребордного расстояния устройства. В процессе работы управляющий блок рассчитывает текущее значение AF ребордного расстояния устройства и сравнивает его с уставкой AF0 ребордного расстояния. Разность ΔF этих значений представляет собой отклонение от требуемой поперечной совместимости между устройством и путем. Значение можно использовать в качестве начального значения для первой управляющей процедуры CF, рассчитывающей требуемое вращение для достижения требуемого перекоса S0 для парирования обнаруженной разности ΔF согласно вышеприведенному описанию.
Управляющий блок также рассчитывает текущее значение AS перекоса устройства и сравнивает его с вычисленным значением S0 перекоса. Разность Δs этих значений представляет собой величину дополнительного перекоса, требуемого для достижения требуемого поперечного положения, заданного AF0. То есть, значение Δs можно использовать в качестве начального значения для второй управляющей процедуры Cs, генерирующей один или более сигналов ST управления скоростью для двигательных приводов колес w1, w2, w3, w4.
Такой алгоритм способствует усовершенствованной логике управления приводом, принимающей во внимание текущую совместимость между всем устройством и путем, и помогает эффективно избегать нежелательного износа частей, находящихся в зацеплении с рельсами в процессе использования.
В еще одном аспекте осуществления изобретения способствуют алгоритму, в котором для более эффективного и экономичного управления двигательными приводами устройства применяют зарегистрированные исторические данные по совместимости пути и устройства. Согласно Фиг.5 вычисление сигналов управления обычно выполняется по уставке AF0 ребордного расстояния устройства. На путях, где ширина колеи может изменяться значительно, использование фиксированного значения в качестве уставки AF0 может быть непригодным для парирования значительных отклонений ширины колеи. Однако в исторических данных, собранных в процессе работы устройства, зарегистрированы показатели, представляющие собой текущую размерную совместимость устройства и пути в определенных позициях. Следовательно, эти данные можно использовать для варьирования значения уставки AF0 устройства таким образом, чтобы в логике управления приводом были заранее проанализированы истинные размеры пути. Соответственно, в настоящем варианте осуществления используемое логикой управления приводом значение не постоянно, а является функцией (например, сплайновой функцией) значений, которые различны для различных позиций по длине пути. С помощью такого алгоритма, например, мостовой кран, приближающийся по рельсовому пути к позиции, где ширина колеи пути сужается, можно немного перекосить для парирования меньшего расстояния между рельсами.
В варианте осуществления по Фиг.5 сигналы от детекторов, сопоставленных с рельсами в передней и задней части устройства, были использованы для генерирования текущих значений для устройства в целом. Так как предложенный алгоритм построен на использовании расстояний, сопоставленных колесам на противоположных торцах крана, то также можно генерировать сигналы управления для приводных двигателей последовательных пар колес w1, w2, w3, w4 по отдельности. Во многих реализациях размеры устройства в направлении пути намного меньше поперечных размеров, поэтому совместные управляющие значения могут использоваться всеми колесами устройства. Тем не менее, такая возможность реагирования на текущую несовместимость по разному для передних и задних частей устройства очень важна на путях, где отклонения могут следовать друг за другом очень плотно.
Осуществления изобретения содержат также компьютерный программный продукт, содержащий средство программного кода, выполняющее этапы способа, когда программа исполняется на вычислительном устройстве. Такое вычислительное устройство может применяться как управляющий блок, показанный на Фиг.1. На блок-схеме Фиг.6 показаны этапы такого способа. Процедура согласно Фиг.6 начинается, когда управляющий блок включают и функционально соединяют с устройством, содержащим группу детекторов, причем каждый детектор находится в пространственном взаиморасположении с колесом устройства. Управляющий блок при этом входит в режим ожидания (этап 60) для приема и обработки сигналов от детекторов. В данном варианте осуществления изобретения каждый работающий детектор генерирует в управляющий блок сигнал, представляющий собой поперечное расстояние конкретной части конкретного колеса от рельса. После получения такого сигнала (этап 62) управляющий блок связывает сигнал с координатными данными, причем координатные данные представляют собой конкретную позицию по длине пути, в которой было измерено поперечное расстояние конкретной части колеса от рельса. Как уже было обсуждено со ссылкой на Фиг.2, время приема сигнала управляющим блоком может быть применено для определения координатных данных, или же для этой цели могут быть применены дополнительные алгоритмы. Затем управляющий блок комбинирует (этап 66) сигналы, принимаемые от детекторов, находящихся в пространственном взаиморасположении с колесами на противоположных сторонах устройства, имеющие согласующиеся метки времени. Согласование меток времени было рассмотрено подробнее со ссылкой на Фиг.3. Комбинированные сигналы затем используют для генерирования (этап 68) показателя L(t), представляющего собой текущую размерную совместимость устройства и пути, что также рассмотрено со ссылкой на Фиг.3.
Специалистам в данной области техники ясно, что возможны различные варианты осуществления в пределах объема приводимой формулы изобретения. Например, в некоторых вышеописанных примерах говорится о «фиксированном пространственном взаиморасположении» между колесами и детекторами. Хотя фиксированное пространственное взаиморасположение между датчиками и колесами упрощает обработку данных, специалистам понятно, что существенным является то, чтобы пространственное взаиморасположение было известно, или чтобы оно могло быть определено. Например, представим, что детектор смонтирован на гибких монтажных основаниях. На каждом монтажном основании один детектор измеряет расстояние до колеса, а другой детектор измеряет расстояние до рельса. При такой конструкции расстояние между рельсом и колесом может быть измерено, хотя пространственное взаиморасположение между колесами и детекторами не является фиксированным. Поэтому изобретение и его осуществления не ограничены конкретными вышеописанными примерами, но могут варьироваться в пределах объема формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ВНЕШНЕГО ПРЕДСКАЗАНИЯ | 2019 |
|
RU2785725C2 |
| Устройство для цифровой фильтрации | 1988 |
|
SU1577072A1 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ КОДОВОЙ КНИГИ ПРЕДВАРИТЕЛЬНОГО КОДИРОВАНИЯ ДЛЯ МНОГОАНТЕННОЙ ПЕРЕДАЧИ | 2009 |
|
RU2455761C1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КРАЕВ ДЛЯ СИСТЕМЫ ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 1991 |
|
RU2020582C1 |
| БЫСТРЫЕ АЛГОРИТМЫ ДЛЯ ВЫЧИСЛЕНИЯ 5-ТОЧЕЧНОГО DCT-II, DCT-IV И DST-IV, И АРХИТЕКТУРЫ | 2008 |
|
RU2464540C2 |
| КОНТРОЛЬ ЗА УСТРОЙСТВОМ ОСВЕЩЕНИЯ | 2007 |
|
RU2423024C2 |
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОГО БЛОКА В СОСТАВЕ СИСТЕМЫ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2159458C1 |
| Пневматическая шина | 2015 |
|
RU2633457C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ АМПЛИТУДНОЙ ПСЕВДОМОНОИМПУЛЬСНОЙ ПЕЛЕНГАЦИИ | 1999 |
|
RU2157549C1 |
| Устройство для пространственной селекции сигналов навигационных космических аппаратов с использованием пеленгования источников радиопомех | 2016 |
|
RU2619800C1 |
Предложена система (100) с устройством (102), движущимся на колесах (w1, w2, w3, w4) вдоль по образуемому рельсами (112, 114) пути и имеющим две противоположные стороны (e1, e2), стоящие на двух или более колесах (w1, w2, w3, w4). Устройство (102) содержит детекторы (d1, d2, d3, d4), по меньшей мере, по одному на каждую сторону устройства (e1, e2), находящиеся в известном пространственном взаиморасположении с колесом (w1, w2, w3, w4) и предназначенные для генерирования для управляющего блока (140) сигнала, представляющего собой измеренное поперечное расстояние конкретной части колеса от рельса (112, 114). Принятые от детекторов (d1, d2, d3, d4) сигналы связывают с координатными данными, представляющими собой конкретную позицию по длине пути, в которой было измерено расстояние конкретной части колеса (w1, w2, w3, w4) от рельса (112, 114). Сигналы, принятые от детекторов (d1, d2, d3, d4), находящихся в пространственном взаиморасположении с колесами (w1, w2, w3, w4) на разных сторонах (e1, e2) устройства (102), используют для генерирования показателя, представляющего собой текущую размерную совместимость устройства (102) и пути. Предложены также способ контроля совместимости рельсов и вычислительное устройство. Достигается улучшенный контроль совместимости устройства и образуемого рельсами пути. 3 н. и 8 з.п. ф-лы, 6 ил.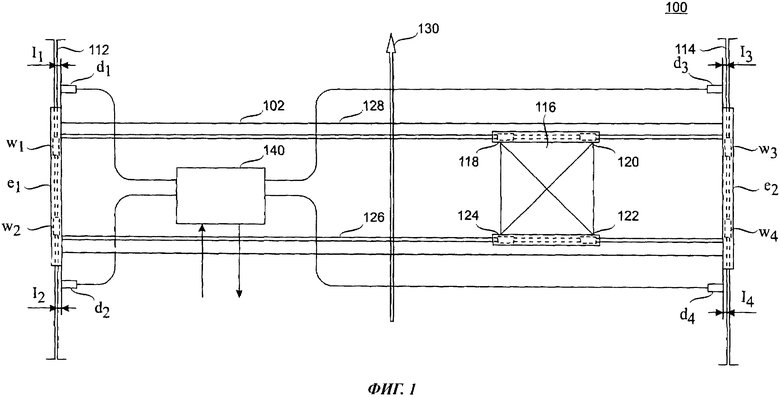
1. Система (100) контроля совместимости рельсов и устройства, выполненного с возможностью перемещения вдоль указанных рельсов, содержащая:
- устройство (102, 116), выполненное с возможностью движения вдоль по пути, образованному рельсами (112, 114; 126, 128), имеющее два противоположных торца (e1, е2), каждый из которых стоит на двух или более колесах (w1-w4 118-124),
- логику управления приводом, направляющую ходовые устройства колес,
- управляющий блок (140), функционально соединенный с устройством, причем
- устройство содержит по меньшей мере два детектора (d1, d2, d3, d4) на каждом из двух противоположных торцов, при этом по меньшей мере два детектора на каждом из двух противоположных торцов находятся в известном пространственном взаиморасположении с соответствующими колесами (w1, w2, w3, w4) для генерирования для управляющего блока сигнала, представляющего измеренное поперечное расстояние (I1, I2, I3, I4) конкретной части колеса от соответствующего рельса;
- управляющий блок (140) выполнен с возможностью приема сигналов (S1-S4) от по меньшей мере двух детекторов, расположенных на каждом из двух противоположных торцов, и записи принятых сигналов со связанными координатными данными, представляющими собой конкретные позиции по длине пути, в которых было измерено поперечное расстояние конкретной части колеса от соответствующего рельса;
- управляющий блок (140) выполнен с возможностью использования принятых записанных сигналов от по меньшей мере двух детекторов, расположенных на каждом из двух противоположных торцов и связанных координатных данных для генерирования показателя L(t), представляющего поперечную размерную совместимость устройства и пути в позиции, в которую движется устройство, причем показатель, представляющий поперечную размерную совместимость устройства и пути, является переменным значением, представляющим поперечный размер пути;
- управляющий блок (140) выполнен с возможностью подачи в логику управления приводом показателей, представляющих собой поперечную размерную совместимость устройства и пути;
- логика управления приводом выполнена с возможностью вычисления для каждого торца устройства соответствующего торцевого значения ребордного расстояния, представляющего собой поперечную размерную совместимость колес с ходовым путем в торце устройства, и соответствующего торцевого значения перекоса, представляющего собой уровень перекоса линии, соединяющей последовательные колеса на торце устройства.
2. Система по п. 1, отличающаяся тем, что управляющий блок выполнен с возможностью идентифицировать детектор, от которого поступил принятый сигнал; идентифицировать время выполнения измерения детектором, от которого поступил сигнал; использовать запись для привязки времени выполнения измерения к позиции конкретной части устройства по длине пути; привязывать позицию конкретной части устройства по длине пути к позиции детектора по длине пути; использовать позицию детектора по длине пути как координатные данные сигнала.
3. Система по п. 1, отличающаяся тем, что управляющий блок выполнен с возможностью использования сигналов, полученных от двух детекторов, находящихся в указанном пространственном взаиморасположении с колесами на противоположных сторонах устройства для генерирования значений ширины колеи рельсового пути.
4. Система по п. 1 или 3, отличающаяся тем, что управляющий блок выполнен с возможностью использования сигналов, полученных от двух пар детекторов, находящихся в указанном пространственном взаиморасположении с колесами, причем каждая пара находится в конкретной позиции по длине пути, а детекторы пары детекторов находятся на противоположных сторонах устройства, для генерирования комбинированного показателя расстояний конкретных частей всех колес до их соответствующих рельсов.
5. Система по п. 1, отличающаяся тем, что она подключена к системе оперативного администрирования, а управляющий блок выполнен с возможностью передачи показателя, представляющего текущую размерную совместимость устройства и пути в систему оперативного администрирования.
6. Система по п. 1, отличающаяся тем, что устройство выполнено с возможностью прохождения маршрута по пути, а управляющий блок выполнен с возможностью генерирования группы показателей, представляющих текущую размерную совместимость устройства в позициях на маршруте по длине пути.
7. Система по п. 6, отличающаяся тем, что управляющий блок выполнен с возможностью доставки вместе с группой показателей значений, представляющих преобладающие рабочие условия прохождения маршрута.
8. Система по п. 1, отличающаяся тем, что логика управления приводом содержит первую управляющую процедуру, применяющую вычисленное торцевое значение ребордного расстояния для определения требуемого поворота торца; вторую управляющую процедуру, применяющую вычисленное торцевое значение перекоса для определения одного или более сигналов управления скоростью для двигательных приводов.
9. Система по п. 1, отличающаяся тем, что устройство является краном или грузонесущей частью крана.
10. Способ контроля совместимости рельсов и устройства, выполненного с возможностью перемещения вдоль указанных рельсов, с использованием системы (100), содержащей:
- устройство (102, 116), выполненное с возможностью движения вдоль по пути, образованному рельсами (112, 114; 126, 128), имеющее два противоположных торца (е1, е2), каждый из которых стоит на двух или более колесах (W1-W4; 118-124),
- логику управления приводом, направляющую ходовые устройства колес,
- управляющий блок (140), функционально соединенный с устройством, причем устройство содержит, по меньшей мере, два детектора (d1, d2, d3, d4) на каждом из двух противоположных торцов, при этом по меньшей мере два детектора на каждом из двух противоположных торцов находятся в известном пространственном взаиморасположении с соответствующими колесами (w1, w2, w3, w4) для генерирования для управляющего блока сигнала, представляющего измеренное поперечное расстояние (l1, l2, l3, l4) конкретной части колеса от соответствующего рельса,
при этом согласно способу в управляющем блоке (140):
- принимают сигналы (S1-S4) от по меньшей мере двух детекторов, расположенных на каждом из двух противоположных торцов, и записывают принятые сигналы со связанными координатными данными, представляющими конкретные позиции по длине пути, в которых было измерено поперечное расстояние конкретной части колеса от соответствующего рельса,
- используют принятые записанные сигналы от по меньшей мере двух детекторов, расположенных на каждом из двух противоположных торцов и связанные координатные данные для генерирования показателя L(t), представляющего поперечную размерную совместимость устройства и пути в позиции, в которую движется устройство, причем показатель, представляющий поперечную размерную совместимость устройства и пути, является переменным значением, представляющим поперечный размер пути;
- подают в логику управления приводом показатели, представляющие собой поперечную размерную совместимость устройства и пути;
причем в логике управления:
- вычисляют для каждого торца устройства соответствующее торцевое значение ребордного расстояния, представляющее собой поперечную размерную совместимость колес с ходовым путем в торце устройства, и соответствующее торцевое значение перекоса, представляющее собой уровень перекоса линии, соединяющей последовательные колеса на торце устройства.
11. Вычислительное устройство для управления системой по п. 1, содержащее средство программного кода для осуществления этапов способа при исполнении программы на вычислительном устройстве, причем способ содержит следующие этапы:
- прием сигналов управляющего блока, причем сигнал представляет измеренное поперечное расстояние конкретной части колеса от рельса;
- связывание принятых от детекторов сигналов с координатными данными, представляющими конкретную позицию по длине пути, в которой было измерено поперечное расстояние конкретной части колеса от рельса;
- комбинирование сигналов от детекторов, находящихся в пространственном взаиморасположении с колесами на противоположных сторонах устройства с согласующейся меткой времени; и
- использование сигналов от колес на противоположных сторонах устройства с согласующейся меткой времени для генерирования показателя, представляющего текущую размерную совместимость устройства и пути, причем текущая размерная совместимость означает совместимость устройства и пути в позиции, в которую движется устройство.
| US4095160A, 13.06.1978 | |||
| JP60060509A, 08.04.1985 | |||
| Способ изготовления щелочной части заряда химического пенного огнетушителя | 1954 |
|
SU100594A1 |

