ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к технологии управления давлением в стволе скважины и, в частности, касается способа управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем, который способен обеспечить, чтобы распределение давления по поперечному сечению потока в забое скважины или на устье скважины находилось в диапазоне безопасности и чтобы давление на устье скважины было безопасным для ствола скважины.
УРОВЕНЬ ТЕХНИКИ
В последние годы с нарастанием объема разведочных работ и эксплуатации месторождений бурение скважин все чаще происходит в зонах, отличающихся разнообразной сложной структурой. Стандартная технология управления давлением при бурении с положительным дифференциальным давлением (OBD) не удовлетворяет современным производственным требованиям, предъявляемым в случаях бурения скважины в зоне со сложной геологической структурой, безопасного бурения в узком диапазоне плотности породы, бурения в слое, содержащем H2S, блокирования бурового долота из-за утечки бурового раствора высокой плотности и в условиях угроз, вызванных утечкой бурового раствора высокой плотности. Поскольку технология управления давлением в условиях OBD все еще связана со стандартным грубым управлением давлением, осуществляемым вручную, достижение цели управления давлением в стволе скважины при использовании такого способа управления зависит от опыта операторов на местах, где относительно стабильное состояние в скважине зачастую не может быть достигнуто путем многократной регулировки дроссельного клапана, а кроме того, давление в забое скважины характеризуется большой флуктуацией, которая не позволяет обеспечить сколько-нибудь постоянное давление в забое скважины в качестве цели управления. Однако использование технологии тонкого управления давлением позволяет выполнять бурение скважины в зонах со сложной структурой, например бурение в условиях узкого диапазона плотности, и сократить на 80% проблемы, с которыми сталкиваются при использовании стандартной технологии бурения скважин.
Поскольку скважина является размытой системой с большим уровнем неопределенности, стандартный подход к управлению давлением на устье скважины, имеющий своей целью обеспечение постоянства давления, делает невозможным тонкое управление давлением в стволе скважины или даже может привести к возникновению аварийных ситуаций. В частности, в условиях перелива на устье скважины рост давления в обсадной колонне вызывает увеличение степени открытия дроссельного клапана, что отражается на состоянии в устье скважины, причем перелив вызывает дополнительную подачу флюида из забоя в ствол скважины, что приводит к падению давления в забое скважины. Вдобавок, в процессе бурения необходимо, чтобы флуктуация давления в забое скважины и флуктуация давления в стволе скважины все время уменьшались, но так как срыв управления давлением возникает легко даже из-за малейшей ошибки, это приводит к тяжелым аварийным ситуациям, таким как перелив скважины.
Большое количество стандартных способов управления давлением относится к потоку в стволе скважины. Однако, несмотря на полученные результаты исследований, до сих пор не предложен набор способов управления давлением на основе прогнозных вычислений, который способен обеспечить надежное управление давлением в стволе скважины в любое время. Если эта проблема не будет удовлетворительно решена, это отрицательно скажется на популяризации и перспективах применения технологии бурения с отрицательным дифференциальным давлением (в системе скважина-пласт) (UBD) и технологии бурения с управлением давлением (MPD) при сохранении угрозы потери управления процессом бурения скважины и высокой стоимости бурения скважины, в результате чего большое количество нефтяных месторождений, запланированных ранее к вводу в эксплуатацию, не будут пущены в срок.
Yang Xiongwen, Zhou Yingcao, Fang Shiliang и Liu Wei опубликовали статью Design and laboratory test of hierarchical intelligent control system for managed pressure drilling в периодическом журнале Drilling Techniques, Vol. 39 №.4 Jul. 2011, где раскрыта стратегия многоуровневого иерархического управления для технологии MPD, но при этом остались нерешенными следующие технические проблемы.
1. Целью управления является управление давлением на устье скважины. Хотя упомянутая в указанной литературе цель состоит в управлении давлением в забое скважины, на блок-схемах 2, 3 и 4 и их описании эта цель базируется на управлении давлением на устье скважины. Управление давлением на устье скважины является лишь небольшой частью реального управления давлением в стволе скважины, что эквивалентно стандартному манипулированию, осуществляемому вручную персоналом с помощью дросселя, с тем чтобы обеспечить соответствие давления на устье скважины установленному значению. Однако нерешенным остается вопрос о том, как управлять давлением в забое скважины путем управления давлением на устье скважины, то есть каким образом обеспечить соответствие давления в забое скважины установленному значению.
2. При расчетах трудно получить точное значение расхода перелива. Контролируемый на устье скважины расход перелива является вариантом перелива при достижении устья скважины. Данные непрерывного контроля расхода перелива, необходимые для вычисления и управления, поступают слишком поздно, и поэтому цель высокоточного правления не может быть достигнута.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Для решения технической проблемы, существующей в известном уровне техники и заключающейся в неспособности обеспечить в любое время надежное управление давлением в стволе скважины, в настоящем изобретении предложен способ управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем, который позволяет управлять давлением в стволе скважины, обеспечивая его нахождение в допустимом техническом диапазоне флуктуации давления, что позволяет с высокой точностью достичь цели управления давлением.
Настоящее изобретение реализовано на основе следующих технических решений.
Способ управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем содержит следующие шаги:
определение давления в забое скважины, давления на стояке, давления в обсадной колонне, расхода закачивания и выходного расхода в ходе процесса строительства скважины;
определение наличия перелива или утечки;
при отсутствии перелива или утечки тонкую регулировку давления в обсадной колонне у устья скважины в соответствии со значениями разности между давлением в забое скважины, давлением на стояке, давлением в обсадной колонне и их заданными значениями, или небольшими флуктуациями давления в забое скважины, давления на стояке или давления в обсадной колонне, с тем чтобы обеспечить установленное значение для давления в забое скважины, давления на стояке или давления в вертикальной обсадной колонне, где величину регулировки оптимизируют в соответствии со стандартным алгоритмом управления на основе прогнозирующей модели с тем, чтобы вычислить параметр цели управления для следующего момента времени для обеспечения соответствия давления в забое скважины, давления в стояке или давления в обсадной колонне упомянутым установленным значениям;
при наличии перелива или утечки использование динамической модели однофазного или многофазного потока в стволе скважины для имитации и вычисления местоположения перелива или утечки и времени начала перелива или утечки, прогнозирования на будущий период времени изменения давления в стволе скважины в процессе бурения скважины, и использование алгоритма оптимизации для вычисления параметра управления, обеспечивающего минимальное отклонение действительного давления в стволе скважины от заданного значения для будущего периода времени; и
повторение процесса оптимизации для следующего временного периода после выбора и установки первого параметра управления.
Уравнение управления с прогнозированием для динамической модели однофазного или многофазного потока выражается следующей формулой:
где 




Кроме технического решения настоящее изобретение содержит обработку дискретизации на основе динамической модели многофазного потока, полученной выше, причем эта обработка содержит: преобразование принятой непрерывной модели ствола скважины в следующую дискретную модель:
где 



где давления в обсадной колонне на временных интервалах для двух моментов времени получают путем обработки на основе линейной интерполяции двух значений 

Ошибка между действительным измеренным давлением в обсадной колонне и давлением в обсадной колонне, вычисленным при прогнозировании, представляет собой ошибку прогнозирования e(k+i),
где 

где 

Прогнозируемое значение e(k+i) в момент n+i в будущем оценивается методом полиномиального сглаживания ошибки на основе значений в данный момент времени, где прогнозируемое значение e(k+i) содержит ошибку в момент k и скорректированную ошибку, где во время этого процесса (L > l2 > 1), и когда L=12

где 


Давление в забое скважины получают в соответствии с экспоненциальной кривой, близкой к кривой эталонного давления 

где 
где 

где 


где 
Вычисление параметра управления, обеспечивающего минимальное отклонение действительного давления в забое скважины для будущего периода времени с использованием алгоритма оптимизации, содержит в частности следующий шаг:
оптимизацию прогнозируемых выходных значений процесса на множестве сглаживающих точек, обеспечивающих минимальное отклонение от эталонной траектории, где оптимизационные показатели качества представляют собой квадратурные показатели качества, которые получают методом оптимизации, где:

где (k+i) - (k+i)-й момент сглаживания, m - количество сглаживающих точек, 


Когда для устройства управления давлением в обсадной колонне задан управляющая команда давления в обсадной колонне, система текущего контроля устройства управления давлением в обсадной колонне отрабатывает эту управляющую команду, причем в ходе ее выполнения величина открытия дроссельного клапана регулируется в соответствии со стандартным алгоритмом автоматического управления с обратной связью на основе модели прогнозирования MPC, который описан в литературе [1] и здесь не описывается.
Вышеупомянутое минимальное действительное отклонения давления в забое скважины означает минимальное давление для создания минимального перелива или утечки.
Параметр управления, обеспечивающий минимальную вышеупомянутую разность между действительным и заданным давлениями в забое скважины, содержит давление в вертикальной обсадной колонне, расход закачивания, плотность и вязкость бурового раствора.
Способ согласно настоящему изобретению содержит, но не только, способ управления системой с прогнозирующей моделью на основе измеренных данных PWD.
Способ согласно настоящему изобретению содержит, но не только, способ проверки гидравлической модели на основе измеренных данных.
По сравнению с известным уровнем техники настоящее изобретение обеспечивает следующие технические эффекты.
1. Согласно способу по настоящему изобретению текущий контроль и прогнозирование в реальном времени и онлайновая история изменения давления на устье скважины и в стволе скважины для некоторых моментов времени в будущем, оптимизация контрольного объема, регулирование и целевое управление давлением в обсадной колонне, которое выражается в единицах, характеризующих степень открытия дроссельного клапана на устье скважины, для управления давлением в обсадной колонне, осуществляются таким образом, что давление в забое скважины поддерживается в безопасном диапазоне, что решает техническую проблему, характерную для известного уровня техники, неспособного обеспечить надежное управление давлением в стволе скважины в любое время таким образом, чтобы управление давлением в стволе скважины обеспечивало технически допустимый диапазон его флуктуации, что позволяет реализовать точное управление давлением. Кроме того, использование способа по настоящему изобретению выгодно с точки зрения значительного сокращения количества сложных аварийных ситуаций под землей во время процесса бурения на нефть и газ и повышения выгоды от выполнения разведочных работ и эксплуатации, что имеет большое значение.
2. В способе согласно настоящему изобретению используется ошибка прогнозирования, что позволяет дополнительно повысить точность данного способа управления.
3. В способе согласно настоящему изобретению вычисление оценок основано на значениях величин в данный момент времени, что повышает точность прогнозирования ошибок.
4. В настоящем изобретении на основе принципа, заключающегося в том, что ствол скважины рассматривается как большая размытая система, в качестве управляемой величины служит давление в забое скважины и давление в вертикальной обсадной колонне у устья скважины. Вычисление давления в забое скважины основано на базовой теории механики флюидов в стволе скважины, в ходе которого выполняется прогнозирование и обработка на основе модели в соответствии с вычисленными результатами и действительными результатами, с тем, чтобы обеспечить окончательно заданное значение давления в обсадной колонне таким образом, чтобы давление в забое скважины поддерживалось на заданном уровне все время, и давление в стволе скважины оставалось в границах диапазона безопасности, что обеспечивает устранение недостатков известного уровня техники, где учитывалась только степень открытия дроссельного клапана и зависимость только от алгоритма управления на основе прогнозирующей модели (MPC).
5. По сравнению со способом, раскрытым в периодической литературе, относящейся к известному уровню техники «Design and laboratory test of hierarchical intelligent control system for managed pressure drilling», в способе согласно настоящему изобретению принято техническое решение, состоящее в том, что «при отсутствии перелива или утечки, тонкую регулировку давления в обсадной колонне у устья скважины в соответствии со значениями разности между давлением в забое скважины, давлением на стояке, давлением в обсадной колонне и их заданными значениями, или небольшими флуктуациями давления в забое скважины, давления на стояке или давления в обсадной колонне, с тем чтобы обеспечить установленное значение для давления в забое скважины, давления на стояке или давления в вертикальной обсадной колонне, где величину регулировки оптимизируют в соответствии со стандартным алгоритмом управления на основе прогнозирующей модели с тем, чтобы вычислить параметр цели управления для следующего момента времени» и которое способно обеспечить поддержание давления в забое скважины или давления в обсадной колонне на заданном уровне.
6. По сравнению со способом, раскрытым в периодической литературе, относящейся к известному уровню техники «Design and laboratory test of hierarchical intelligent control system for managed pressure drilling», в способе согласно настоящему изобретению принято техническое решение, состоящее в том, что «при наличии перелива или утечки, использование динамической модели однофазного или многофазного потока в стволе скважины для имитации и вычисления местоположения перелива или утечки и времени начала перелива или утечки, прогнозирования на будущий период времени изменения давления в стволе скважины в процессе бурения скважины, и использование оптимизационного алгоритма для вычисления параметра управления, обеспечивающего минимальное отклонение действительного давления в стволе скважины от заданного значения для будущего периода времени» и которое обеспечивает достижение задачи точного управления давлением.
Эти и другие задачи, признаки и преимущества настоящего изобретения станут очевидными из нижеследующего подробного описания, сопроводительных чертежей, и из прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее описание настоящего изобретения иллюстрируется сопроводительными чертежами и предпочтительными вариантами его осуществления, где:
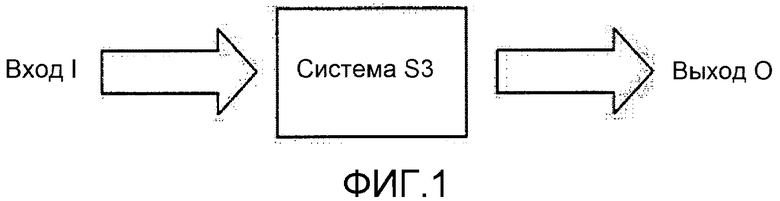
Фиг. 1 - схема прогнозирующей системы модели давления в стволе скважины согласно настоящему изобретению;
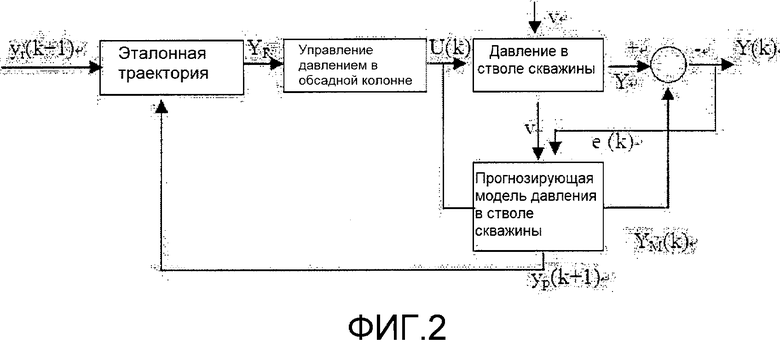
фиг. 2 - принципиальная схема способа управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем согласно настоящему изобретению;
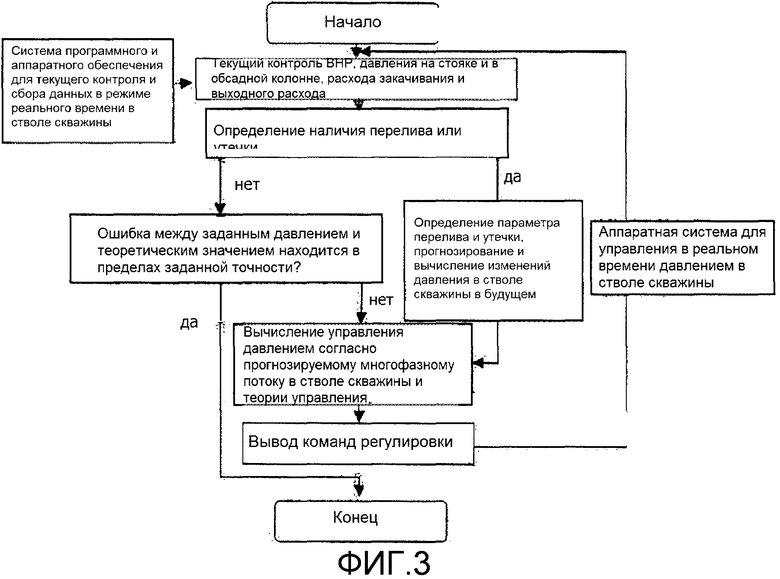
фиг. 3 - блок-схема опционного управления прогнозирующей системой модели давления в стволе скважины в реальном времени;
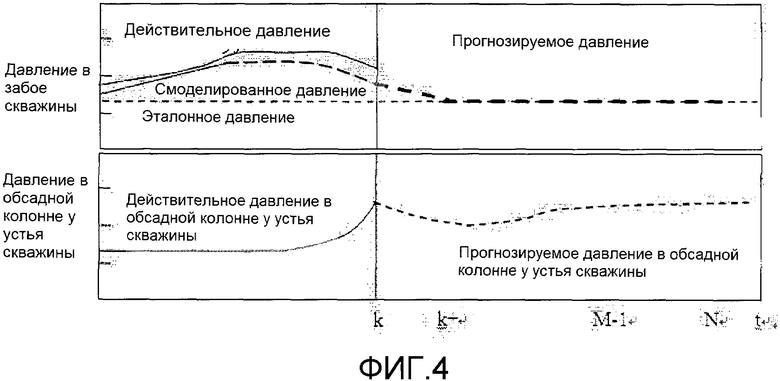
фиг. 4 - схематическое представление способа управления прогнозирующей системой модели давления.
Символы на чертежах:
«I» представляет вход, являющийся управляемым параметром, таким как главные факторы, содержащие плотность, расход и реологический параметр буровой жидкости и другие параметры ствола скважины, или переменный фактор, изменяющийся в реальном времени, содержащий давление в обсадной колонне;
«S» представляет систему ствола скважины; и
«О» представляет вывод, то есть распределение давления по поперечному сечению потока ствола скважины или давления в забое скважины.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА
ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Вариант 1
В настоящем изобретении раскрыт способ управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем, причем способ содержит следующие шаги:
определение давления в забое скважины, давления на стояке, давления в обсадной колонне, расхода закачивания и выходного расхода в ходе процесса строительства скважины;
определение наличия перелива или утечки;
при отсутствии перелива или утечки тонкую регулировку давления в обсадной колонне у устья скважины в соответствии со значениями разности между давлением в забое скважины, давлением на стояке, давлением в обсадной колонне и их заданными значениями, или небольшими флуктуациями давления в забое скважины, давления на стояке или давления в обсадной колонне, с тем чтобы обеспечить установленное значение для давления в забое скважины, давления на стояке или давления в вертикальной обсадной колонне, где величину регулировки оптимизируют в соответствии со стандартным алгоритмом управления на основе прогнозирующей модели с тем, чтобы вычислить параметр цели управления для следующего момента времени для обеспечения соответствия давления в забое скважины, давления в стояке или давления в обсадной колонне упомянутым установленным значениям;
при наличии перелива или утечки использование динамической модели однофазного или многофазного потока в стволе скважины для имитации и вычисления местоположения перелива или утечки и времени начала перелива или утечки, прогнозирования на будущий период времени изменения давления в стволе скважины в процессе бурения скважины, и использование алгоритма оптимизации для вычисления параметра управления, обеспечивающего минимальное отклонение действительного давления в стволе скважины от заданного значения для будущего периода времени; и
повторение процесса оптимизации для следующего временного периода после выбора и установки первого параметра управления.
В вышеупомянутом техническом решении вдобавок к режиму его реализации может быть реализована динамическая модель однофазного или многофазного потока с использованием стандартной методики в полевых условиях. Вдобавок к режиму реализации в данном техническом решении согласно настоящему изобретению может быть реализован оптимальный алгоритм с использованием стандартной методики в полевых условиях.
По сравнению с известным уровнем техники упомянутое техническое решение согласно настоящему изобретению обеспечивает следующие технические эффекты. Способ согласно настоящему изобретению позволяет осуществлять текущий контроль и прогнозирование в реальном времени в онлайновом режиме изменения давления на устье скважины и в забое скважины для некоторого временного периода в будущем в соответствии с действительной ситуацией, позволяет регулировать степень открытия дроссельного клапана на устье скважины для управления давлением в обсадной колонне, таким образом, что давление в забое скважины будет находиться в пределах диапазона безопасности с тем, чтобы решить техническую проблему, существующую в известном уровне техники, состоящую в невозможности обеспечить надежное управление давлением для ствола скважины в любое время, таким образом, чтобы давление в стволе скважины находилось в технически допустимом диапазоне флуктуации и была достигнута цель точного управления давлением. Кроме того, использование способа согласно настоящему изобретению выгодно с точки зрения значительного сокращения числа сложных аварийных ситуаций под землей во время процесса бурения на нефть и газ.
Вариант 2
Согласно другому предпочтительному варианту настоящего изобретения принцип функционирования настоящего изобретения и используемое для него техническое решение состоит в следующем.
1. В ходе процесса управления давлением в стволе скважины ствол скважины рассматривается как большая система с точки зрения управления давлением.
В процессе бурения скважины из-за изменчивости давления в пласте флюид из пласта может поступать в ствол скважины, причем объем поступления этого флюида связан не только с параметрами пласта, но также зависит от давления в забое скважины. На давление в забое скважины непосредственно влияет давление в обсадной колонне, и, кроме того, рекуррентное состояние и потеря давления вследствие гидравлического сопротивления. При поступлении флюида из пласта в ствол скважины состояние потока в скважине изменяется, что влияет на расход поступающего флюида и наоборот. Таким образом, ствол скважины и пласт взаимодействуют и связаны друг с другом, образуя единое целое, представляющее собой большую систему. Для управления профилем распределения давления или давлением в забое скважины, обеспечивающего ожидаемое заданное значение, необходимо рассмотреть весь ствол скважины как систему, обозначенную здесь как S.
Если в этой системе имеется «запускающий вход», обозначенный здесь как I, который может представлять собой управляемый параметр, например определяющие факторы, содержащие плотность, расход и геологические параметры бурового раствора и другие параметры ствола скважины, либо изменяющийся в реальном времени фактор, содержащий давление в обсадной трубе, то система будет реагировать соответствующим образом, то есть выход системы, обозначенный как О, предстанет в виде распределения давления по поперечному сечению потока в стволе скважины или давления в забое скважины, что показано на фиг. 1.
2. Способ управления давлением в стволе скважины основан на модели, содержащей правила протекания флюида в стволе скважины, позволяющей управлять распределением давления по поперечному сечению ствола скважины или давлением в забое скважины на основе прогнозирующей модели.
Хотя система, представляющая ствол скважины, является размытой системой, на которую влияют различные факторы, поток флюида внутри ствола скважины имеет гидродинамические характеристики самого потока и соответствующую теоретическую вычислительную модель. Однако на результаты вычислений на модели влияет не только неточность описания объективных физических законов, лежащих в основе самой модели, но также сильно влияют факторы окружающей среды. Возможно различие между требуемым результатом О управления и выходным результатом. Таким образом, в данной системе можно попробовать реализовать принцип управления с прогнозирующей моделью (MPC), где управление давлением в стволе скважины реализуется на основе прогнозирования, основанного на упомянутых законах системы S, таким образом, что инициирование входа I обеспечивает вывод ожидаемого результата О, что обеспечивает поддержание управляемого таким образом давления в стволе скважины в безопасных пределах в любое время.
Далее подробно описывается техническое решение, обеспечивающее оптимальное давление в обсадной колонне для прогнозирования и управления в реальном времени давлением в стволе скважины.
В ходе всего процесса осуществляется текущий контроль давления в забое скважины, давления на стояке, давления в обсадной колонне, расхода закачивания, выходного расхода, а также текущий контроль технологического процесса строительства скважины, и реализуется базовый принцип управления с прогнозирующей моделью, с тем чтобы достичь целей обработки, относящейся к оптимальному управлению давлением в стволе скважины в реальном времени в вычислительном цикле в ходе процесса бурения, и обработки, касающейся компенсации или регулировки давления в кольцевом пространстве соответственно, с тем чтобы в любой момент времени распределение давления в кольцевом пространстве по поперечному сечению скважины в одном или нескольких ожидаемых циклах не выходило за границы безопасного диапазона. Базовый рабочий принцип, лежащий в основе управления с прогнозированием на основе прогнозирующей модели давления в забое скважины, показан на фиг. 2 и 3.
Как показано на фиг. 2 и 3, в процессе строительства скважины определяют давление в забое скважины, давление в стояке, давление в вертикальной обсадной колонне, расход закачивания и выходной расход;
определяют наличие перелива или утечки;
при отсутствии перелива или утечки выполняют тонкую регулировку давления в обсадной колонне у устья скважины в соответствии с небольшими флуктуациями давления в забое скважины, давления на стояке или давления в обсадной колонне, с тем чтобы обеспечить установленное значение для давления в забое скважины, давления на стояке или давления в обсадной колонне, и
при наличии перелива или утечки используют динамическую модели однофазного или многофазного потока в стволе скважины для имитации и вычисления местоположения перелива или утечки и времени начала перелива или утечки, прогнозируют на будущий период времени изменения давления в стволе скважины в процессе бурения скважины, и используют предложенный алгоритм оптимизации для вычисления параметра управления, обеспечивающего минимальное отклонение действительного давления в стволе скважины от заданного значения (минимальную величину перелива или утечки) для будущего периода времени в вышеупомянутых безопасных условиях, характеризующихся такими параметрами, как давление в обсадной колонне, смещение, а также плотность и вязкость бурового раствора.
В определенном временном диапазоне вышеупомянутая цель управления достигается путем применения разных временных интервалов при разных настройках управления. После выбора и настройки первого параметра управления процесс оптимизации повторяется для следующего временного периода.
На фиг. 4 показаны принятые шаги дискретизации и временные последовательности, где по вертикали отложено текущее время. На фиг. 4 показаны кривая действительного давления в забое скважины и кривая, вычисленная в результате моделирования, причем моделируемые параметры обрабатываются с компенсацией по обратной связи в соответствии с действительными данными. Как показано на фиг. 4, вычисленная по модели кривая в текущий момент времени не совпадает с контрольными точками. В соответствии со значениями отклонения построена эталонная кривая. Вычисление указанных кривых выполняется таким образом, чтобы обеспечить минимальное отклонение прогнозируемой кривой от эталонной кривой.
Вариант 3
Обратимся к сопроводительным чертежам для описания наилучшего варианта осуществления настоящего изобретения.
Базовый алгоритм для способа управления давлением в стволе скважины, реализуемого системой с прогнозирующей моделью, состоит в следующем.
В системе ствола скважины  , если не определено, что переменными параметрами являются величина утечки и величина перелива бурового раствора, то распределение давления в стволе скважины изменяется соответственно, когда установлено, что цель управления достигается регулировкой давления в обсадной колонне.
, если не определено, что переменными параметрами являются величина утечки и величина перелива бурового раствора, то распределение давления в стволе скважины изменяется соответственно, когда установлено, что цель управления достигается регулировкой давления в обсадной колонне.
Как показано на фиг. 3 согласно принципу управления давлением в стволе скважины на основе прогнозирующей модели, взаимосвязь давления в стволе скважины может быть описана в виде уравнения управления с прогнозирующей моделью, которое выражается следующим образом:
где
преобразование принятой непрерывной модели ствола скважины в следующую дискретную модель:
где
Временные интервалы дискретной нелинейной модели продуктивного пласта нефтегазовой скважины короче, чем временные интервалы управления, так что давления в обсадной колонне на временных интервалах для двух моментов времени получают путем обработки на основе линейной интерполяции двух значений
Целью алгоритма управления является управление давлением в забое скважины в соответствии с эталонным давлением y ref. Поскольку действительное измеренное давление в стояке и действительное измеренное давление в обсадной трубе подвергаются воздействию шума и из-за неполного соответствия модели, имеет место ошибка между действительным измеренным давлением на стояке и вычисленным при прогнозировании давлением на стояке и между действительным измеренным давлением в обсадной колонне и вычисленным при прогнозировании давлением в обсадной колонне, которые называются ошибками прогнозирования. Во время процесса управления с прогнозирующей моделью ошибка прогнозирования проходит обработку в блок прогнозирования для прогнозирования ошибки в будущем и учитывается в эталонной прогнозируемой траектории для компенсации. Имеются различные способы прогнозирования ошибок, например, ошибка e(k+i) прогнозирования оценивается следующим образом:

где
Для повышения точности прогнозируемое значение e(k+i) в момент n+i в будущем оценивается методом полиномиального сглаживания ошибки на основе значений в данный момент времени, где прогнозируемое значение e(k+i) содержит ошибку в момент k и скорректированную ошибку, где во время этого процесса (L > 12 > 1), и когда L=12

где
Во избежание флуктуаций давление в забое скважины получают в соответствии с экспоненциальной кривой, близкой к кривой эталонного давления
где 
где
где

где
В алгоритме скользящей оптимизации для управления с прогнозирующей моделью оптимальную входную кривую для будущего управляющего воздействия
оптимизацию прогнозируемых выходных значений процесса на множестве сглаживающих точек, обеспечивающих минимальное отклонение от эталонной траектории, где оптимизационные показатели качества представляют собой квадратурные показатели качества, которые получают методом оптимизации, где:



где (k+i) - (k+i)-й момент сглаживания, m - количество сглаживающих точек,
где оптимальный параметр управления в реальном времени получают путем вычисления минимального значения вышеупомянутых формул, при оптимальном открытии дроссельного клапана,
где оптимальное открытие дроссельного клапана означает, что давление в забое скважины поддерживается примерно на уровне эталонного давления, а y ref получают путем минимизации формулы посредством использования алгоритма оптимизации.
Поскольку начальное давление в обсадной колонне известно, алгоритм обеспечивает в явном виде первую новую группу данных для кривой давления в обсадной колонне, то есть выполняет вычисления согласно формуле (8). Результаты измерений анализируют для выбора второй новой группы данных для давления в обсадной трубе. Затем процесс повторяется, пока не будет достигнуто оптимальное давление в обсадной колонне, соответствующее эталонному давлению в забое скважины.
Вариант 4
На основе примера 3 настоящее изобретение обеспечивает еще один способ управления давлением в стволе скважины на основе теории управления с прогнозирующей моделью и теории систем, а именно способ управления с прогнозирующей моделью на основе измеренных данных PWD.
Точное прогнозирование изменения давления в следующий момент времени для принятия мер предосторожности при точном управлении давлением позволяет обеспечить поддержание давления в забое скважины в заданном диапазоне как в текущий момент времени, так и в будущем. В этом способе управления используется базовый принцип, касающийся управления с прогнозирующей моделью в современной теории управления, для управления давлением в стволе скважины. Данный способ согласно настоящему изобретении можно использовать для вычисления распределения давления по поперечному сечению ствола скважины на основе гидравлической теории ствола скважины, текущего контроля давления в забое скважины в реальном времени посредством способа текущего контроля забоя скважины, проверки гидравлической модели в реальном времени, прогнозирования и вычисления изменения динамического давления в кольцевом пространстве в стволе скважины на основе накопленной информации и определения необходимых мер по управлению давлением. Базовый принцип простого алгоритма для данного способа состоит в следующем.
Гидравлическая модель позволяет вычислить и проанализировать давление в стволе скважины в реальном времени с тем, чтобы обеспечить управляющее давление P C (i) в обсадной колонне в момент i,

где i представляет i-й момент, BHPTarget(i) представляет заданное значение управления для давления в забое скважины, PH(i) - гидростатическое давление столба бурового раствора, а PF(i) представляет давление, необходимое для перемещения флюида в кольцевом пространстве.
Имеет место ошибка ε(i) между давлением BHPM(i) в забое скважины, полученным путем вычисления в режиме реального времени, и действительным измеренным давлением в забое скважины, BHPC(i)

Поскольку действительное измеренное давление в забое скважины известно, вычисление давления в забое скважины для следующего момента можно проверить и скорректировать таким образом, чтобы вычисленное давление в забое скважины оказалось более точным, и чтобы вычисленное и действительно измеренные давления в забое скважины в следующий момент времени были ближе к цели управления давлением BHPTarget в забое скважины:

где  - модифицированная функция изменения ошибки для первых i моментов, причем ее вычисление может выполняться с использованием алгоритма управления с прогнозирующей моделью в современной теории управления.
- модифицированная функция изменения ошибки для первых i моментов, причем ее вычисление может выполняться с использованием алгоритма управления с прогнозирующей моделью в современной теории управления.
Таким образом, можно вычислить и спрогнозировать давление в забое скважины для следующего момента времени, где уравнение управления давлением в обсадной колонне выглядит следующим образом

В ходе нормального процесса бурения в условиях отсутствия изменения других технологических параметров и отсутствия влияния температуры на давление столба бурового раствора и трение получим уравнение управления давлением в обсадной колонне для следующего момента времени

Вариант 5
На основе примера 3 и примера 4 настоящее изобретение предлагает еще один способ управления давлением в стволе скважины с прогнозирующей моделью: а именно способ с проверкой гидравлической модели на основе измеренных данных.
Когда измеренные данные PWD отсутствуют, используют данные датчика давления с памятью для проверки гидравлической модели бурения в следующий момент времени или проверки гидравлической модели соседней скважины в основном с такими же параметрами.
Основным параметром для проверки являются потери давления на трение. В общем случае на падение гравитационного давления внешние факторы влияют незначительно, так что главным фактором, который определяет изменения давления в забое скважины, являются циркуляционные потери давления на трение. Таким образом, если есть данные о давлении в забое скважины, соответствующие глубине скважины (действительная вертикальная глубина), можно вычислить действительные потери давления на трение. Корреляция потерь давления на трение, вычисленная по гидравлической модели, и действительных потерь давления на трение согласуется с изменениями глубины скважины: f(x)=a+bx+cx2… Таким образом для бурения в следующий момент времени используют формулу корреляции для проверки циркуляционных потерь давления путем вычисления гидравлических показателей с учетом коэффициентов, связанных с изменениями плотности, смещения и глубины скважины, что позволяет в основном удовлетворить требования, предъявляемые к управлению давлением в забое скважины.
Специалистам в данной области техники должно быть очевидно, что вариант настоящего изобретения, показанный на чертежах и описанный выше, является просто примером и не претендует на какие-либо ограничения.
Таким образом, очевидно, что цели настоящего изобретения полностью и эффективно достигнуты. Варианты изобретения были показаны и описаны в целях иллюстрации функциональных и структурных принципов настоящего изобретения, причем допускаются их изменения, если они не выходят за рамки указанных здесь принципов. Таким образом, данное изобретение включает в себя все модификации, не выходящие за рамки существа и объема изобретения, вытекающих из нижеследующей формулы изобретения.
Изобретение относится к технологии управления давлением в стволе скважины. Техническим результатом является возможность обеспечить давление в стволе скважины в любое время. Способ управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем относится к технологиям управления давлением в стволе скважины. Настоящий способ включает в себя: определение давления в забое скважины, давления на стояке, давления в обсадной колонне, расхода закачивания и выходного расхода в ходе процесса строительства скважины, и определение наличия перелива или утечки. Кроме того, при отсутствии перелива или утечки тонкую регулировку давления в обсадной колонне у устья скважины в соответствии с небольшими флуктуациями давления в забое скважины, давления на стояке или давления в обсадной колонне с тем, чтобы обеспечить установленное значение для давления в забое скважины, давления на стояке или давления в вертикальной обсадной колонне. Также, при наличии перелива или утечки использование динамической модели однофазного или многофазного потока в стволе скважины для имитации и вычисления местоположения перелива или утечки и времени начала перелива или утечки. Дополнительно, данный способ включает в себя: прогнозирования на будущий период времени изменения давления в стволе скважины в процессе бурения скважины и использование алгоритма оптимизации для вычисления параметра управления, обеспечивающего минимальное отклонение действительного давления в стволе скважины от заданного значения для будущего периода времени. Также повторение процесса оптимизации для следующего временного периода после выбора и установки первого параметра управления. Настоящий способ позволяет обеспечить управление давлением в стволе скважины в допустимом согласно проектным требованиям диапазоне флуктуаций, реализуя таким образом высокоточное управление давлением. 6 з.п. ф-лы, 4 ил.
1. Способ управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем, содержащий следующие этапы, на которых осуществляют:
определение давления в забое скважины, давления на стояке, давления в вертикальной обсадной колонне, расхода закачивания и выходного расхода в ходе процесса строительства скважины;
определение наличия перелива или утечки;
при отсутствии перелива или утечки тонкую регулировку давления в обсадной колонне у устья скважины в соответствии со значениями разности между давлением в забое скважины, давлением на стояке, давлением в обсадной колонне и их заданными значениями, или небольшими флуктуациями давления в забое скважины, давления на стояке или давления в обсадной колонне для обеспечения установленного значения для давления в забое скважины, давления на стояке или давления в вертикальной обсадной колонне, где величину регулировки оптимизируют в соответствии со стандартным алгоритмом управления на основе прогнозирующей модели для вычисления параметра цели управления для следующего момента времени;
при наличии перелива или утечки использование динамической модели однофазного или многофазного потока в стволе скважины для имитации и вычисления местоположения перелива или утечки и времени начала перелива или утечки, прогнозирования на будущий период времени изменения давления в стволе скважины в процессе бурения скважины, и использование алгоритма оптимизации для вычисления параметра управления, обеспечивающего минимальное отклонение действительного давления в стволе скважины от заданного значения для будущего периода времени; и
повторение процесса оптимизации для следующего временного периода после выбора и установки первого параметра управления.
2. Способ управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем по п. 1, в котором уравнение управления с прогнозированием динамической модели однофазного или многофазного потока выражается следующей формулой:
где
3. Способ управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем по п. 2, в котором дополнительно осуществляют:
обработку дискретизации на основе динамической модели многофазного потока, полученной выше, причем эта обработка дискретизации содержит: преобразование принятой непрерывной модели ствола скважины в следующую дискретную модель:
где
где давления в обсадной колонне на временных интервалах для двух моментов времени получают путем обработки на основе линейной интерполяции двух значений
4. Способ управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем по п. 1 или 3, в котором ошибка между действительным измеренным давлением в обсадной колонне и давлением в обсадной колонне, вычисленным при прогнозировании, представляет собой ошибку прогнозирования e(k+i),
где
где
5. Способ управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем по п. 4, в котором прогнозируемое значение e(k+i) в момент n+i в будущем оценивают методом полиномиального сглаживания ошибки на основе значений в данный момент времени, где прогнозируемое значение e(k+i) содержит ошибку в момент k и скорректированную ошибку, где во время этого процесса (L > 12 > 1), и когда L=12
где
6. Способ управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем по п. 5, в котором давление в забое скважины получают в соответствии с экспоненциальной кривой, близкой к кривой эталонного давления
где
где
где
где
7. Способ управления давлением в стволе скважины на основе теории управления с прогнозирующими моделями и теории систем по п. 1, в котором использование алгоритма оптимизации для вычисления параметра управления, обеспечивающего минимальное отклонение действительного давления в забое скважины для будущего периода времени, в частности содержит:
оптимизацию прогнозируемых выходных значений процесса на множестве сглаживающих точек, обеспечивающих минимальное отклонение от эталонной траектории, где оптимизационные показатели качества представляют собой квадратурные показатели качества, которые получают методом оптимизации, где:
где (k+i) - (k+i)-й момент сглаживания, m - количество сглаживающих точек,
| CN 201818257 U, 04.05.2011 | |||
| СКВАЖИННОЕ УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАСХОДА ПОТОКА ФЛЮИДА ИЗ ПЛАСТА В СТВОЛ СКВАЖИНЫ (ВАРИАНТЫ) И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ СРЕДСТВА РЕГУЛИРОВАНИЯ РАСХОДА ВНУТРИ СКВАЖИНЫ (ВАРИАНТЫ) | 2005 |
|
RU2383729C2 |
| RU 2013148471 A, 20.05.2015 | |||
| CN 201593387 U, 29.09.2010 | |||
| WO 2010115834 A2, 14.10.2010. | |||

