Настоящее изобретение относится к аппарату и способу и, прежде всего, но не исключительно, для получения сигнала.
В одном примере глобальной навигационной спутниковой системы используются спутники, движущиеся вокруг Земли по известным орбитам с точно известными положениями. Эти спутники передают сигналы, которые могут быть приняты на земле приемником. Используя сигналы, принятые от четырех или более спутников, приемник способен определить свое положение с использованием тригонометрии. Сигналы, переданные спутником, содержат в себе псевдослучайные коды. Точность определения положения зависит от таких факторов, как частота повторения кода, детали приемника и атмосферные факторы.
GALILEO - это европейская инициатива в отношении глобальной навигационной спутниковой системы, которая предоставляет службу глобального позиционирования. Было предложено, что GALILEO будет иметь возможность взаимодействовать с системой глобального позиционирования GPS и GLONASS, двумя другими глобальными спутниковыми навигационными системами. Следует принять во внимание, что термин GNSS (глобальная навигационная спутниковая система) используется в этом документе для ссылки на любую из этих глобальных систем позиционирования.
GALILEO в настоящее время имеет систему из тридцати спутников, двадцать семь работающих спутников с тремя запасными на орбите. Предложенный частотный спектр GALILEO имеет два L-диапазона. Более низкий L-диапазон, называемый Е5а и E5b, работает в области от 1164 МГц до 1214 МГц. Имеется также верхний L-диапазон, работающий от 1559 МГц до 1591 МГц.
В GPS и GALILEO со спутника передаются сигналы, которые содержат псевдослучайные коды, которые обрабатываются в приемнике для определения данных о положении. Обработка включает в себя, во-первых, определение относительного смещения полученных кодов с локально выработанной версией кодов (получение данных) и затем определение положения, когда определено относительное смещение (отслеживание). Как получение данных, так и отслеживание включают в себя коррелирование принятых сигналов с локально выработанной версией псевдослучайного кода в течение периода интегрирования.
В системах с широкополосным спектром получение данных может быть сложным, так как оно является двухмерным (частота и время). Другой сложностью является то, что поскольку сигналы намного слабее внутри помещения по сравнению с сигналами вне помещения, намного сложнее получать сигналы в помещении. Прежде всего, работа GNSS в помещении требует приема сигнала, ослабленного по меньшей мере на 20 дБ от эквивалента вне помещения.
Получение данных осуществляется путем поиска методом проб и ошибок ячеек, соответствующих диапазону частот и фаз. Общее число ячеек во временной области равно, например, 4092. Число ячеек в частотной области увеличивается с падением силы сигнала. Это, однако, может быть уменьшено путем использования кварцевого генератора с регулируемой температурой ТСХО. Время, требуемое для поиска ячейки, может увеличиться в сто раз от нахождения на открытом воздухе к нахождению в помещении. Например, для нахождения в помещении каждая ячейка может занимать 100 миллисекунд из-за более слабого сигнала. Это приводит к значительному увеличению времени поиска для находящихся в помещении приемников.
Проблема может быть решена путем использования параллелизма в частотной области, например шестнадцати быстрых каналов преобразования Фурье, или путем параллелизма во временной области, используя параллельные корреляторы. Достижение параллелизма может потребовать более быстрых генераторов синхроимпульсов или большего количества аппаратного обеспечения, что может быть невыгодным. Дополнительно большее количество аппаратного обеспечения или более быстрые генераторы синхроимпульсов могут потребовать увеличенной мощности.
Во всяком случае, одним ограничением является стабильность опорного генератора синхроимпульсов, что может предотвратить сужение полосы пропускания до степени, требуемой для чувствительности внутри помещения.
Как уже упоминалось, сигналы внутри помещения могут быть ослаблены по меньшей мере на 20 дБ от их эквивалента на открытом воздухе. Увеличение чувствительности на 20 дБ для сигналов внутри помещения означает в сто раз более длительное по времени интегрирование. Однако это может быть труднодостижимым, так как поскольку период когерентного интегрирования увеличивается, полоса пропускания канала сужается. Это, в свою очередь, требует проведения большего числа поисков, и в итоге стабильность опорного генератора становится лимитирующим фактором, так как сигнал кажется переходящим с одной частоты на другую, даже прежде чем получение было завершено. Это приводит к рассеиванию энергии, предотвращающему дальнейшее усиление.
Кроме того, используемый способ модуляции может накладывать ограничения на время интегрирования.
Таким образом, могут быть проблемы с выполнением интегрирования с подобными сигналами. Время интегрирования может быть ограничено точностью локального генератора синхроимпульсов и смещениями частоты, вызванными движением спутника и приемника.
Аспекты некоторых вариантов осуществления изобретения могут быть видны из пунктов прилагаемой формулы изобретения.
Некоторые варианты осуществления будут теперь описаны для примера только для прилагаемых фигур, на которых:
Фиг.1 - показана схема одного варианта осуществления,
Фиг.2 - показана схема варианта осуществления, вырабатывающая пилотный сигнал,
Фиг.3 - показан способ одного варианта осуществления, и
Фиг.4 - показан служащий примером приемник согласно вариантам осуществления.
Описанные варианты осуществления относятся к GNSS приемнику для получения и отслеживания GNSS сигнала. Некоторые варианты осуществления, прежде всего, но не исключительно, применимы для GALILEO или любых других глобальных систем спутниковой навигации.
Некоторые варианты осуществления могут быть использованы для получения и/или отслеживания переданных псевдослучайных кодов, прежде всего кодов, переданных как часть сигнала спутниковой навигации, таких как GNSS сигнал.
Следует понимать, что в то время как некоторые варианты осуществления могут быть использованы, прежде всего, в контексте приема сигналов для глобальной спутниковой системы навигации, некоторые варианты осуществления могут быть использованы для приема любых других сигналов.
Некоторые варианты осуществления могут быть применимы, прежде всего, к приему широкополосных сигналов.
Следует понимать, что некоторые варианты осуществления могут быть реализованы для создания программного обеспечения, эквивалентного схеме, показанной в описанных ниже вариантах осуществления. Некоторые варианты осуществления могут быть реализованы только в аппаратном обеспечении. Некоторые варианты осуществления реализуются как в аппаратном обеспечении, так и в программном обеспечении.
Схема для получения данных может быть встроена в любое подходящее устройство, которое должно предоставлять функциональность позиционирования. Устройство может быть переносным устройством или частью более крупного устройства. Например, некоторые варианты осуществления могут быть встроены в устройства спутниковой навигации, устройства связи, такие как мобильные устройства связи, например мобильные телефоны или любые устройства, требующие информацию о местоположении. Устройства спутниковой навигации могут быть автономными устройствами или устройствами, встроенными в различные виды транспорта, такие как автомобили, поезда, самолеты, воздушные шары, корабли, лодки, грузовики, вертолеты и любые другие виды транспорта.
Некоторые варианты осуществления, которые теперь будут описаны, реализованы в интегральных схемах или комплектах интегральных схем. Однако следует понимать, что альтернативные варианты осуществления могут быть по меньшей мере частично реализованы в дискретных схемах.
GALILEO и GPS-III L1 С (одна из версий GPS) предлагают двухкомпонентные открытые гражданские сигналы в диапазоне L1. Один из них имеет целью загрузку данных, что необходимо, но ограничивает качество слежения, а один - чувствительность отслеживания без влияния передачи данных.
Для отслеживания это работает хорошо, однако перед отслеживанием приемник должен получить сигнал, то есть достичь точного захвата времени и частоты. Обычно это не может быть достигнуто последовательно. Оба должны быть правильными, или не может быть получена никакая энергия сигнала.
Однако другие улучшения показателей, такие как взаимная корреляция и подавление помех, привели к более длинному коду расширения спектра, например от 1 мс в GPS С/А коде до 4 мс в GALILEO и до 10 мс в GPS-III. Это делает задачу получения данных более трудной на основании квадратичного закона.
Дополнительно, большие скорости связи могут означать, что проблемные фронты данных происходят намного чаще, от 20 мс в GPS С/А до 4 мс в GALILEO и 10 мс в GPS-III. Требования к чувствительности аппаратуры потребителя изменились от 40 дБ CNo до 10 дБ CNo (в помещении) за последние 25 лет (×1000), что делает прием сигналов примерно в 100 раз более трудным. Кроме того, потребитель теперь ожидает мгновенный ответ, в то время как 25 лет назад было приемлемым время запуска в 10 минут.
Простой ответ, заключающийся в более высокой мощности передачи, в некоторых сценариях не может быть возможным вариантом. Поддержание каждого сигнала значительно ниже термического шума означает, что могут сосуществовать несколько спутников. Увеличение мощности одного отдельного компонента приведет к большему широкополосному шуму для всех других систем и большим помехам взаимной корреляции для систем с похожими характеристиками кода.
Обсуждение проблем, вызванных получением данных при модуляции пилотного сигнала (пилот-сигнала), показало, что передача чистого пилотного сигнала обычно не является решением, по меньшей мере, в некоторых вариантах осуществления. При чувствительности современных приемников имеется много источников паразитной энергии, как от неба, так и от генераторов синхроимпульсов внутри и вблизи приемника. Эти источники паразитной энергии могут быть неверно истолкованы как пилотный сигнал, вызывая ошибочное получение данных. Таким образом, структура данных доставляется с пилотным сигналом и может быть заранее известна.
Как будет описано более подробно ниже, данные могут быть известны только на один символ раньше остальной части сигнала.
Цель пилотного сигнала может заключаться в том, чтобы позволить долгосрочное когерентное интегрирование для сбора энергии при получении данных и/или использовать PLL (петля фазовой синхронизации) без шумов или с низким шумом при отслеживании.
Приемники хранят необработанные данные коррелятора до тех пор, пока не будут обнаружены биты данных, затем удаляют биты данных, позволяя непрерывное интегрирование для PLL, подверженного некоторым небольшим ошибкам при обнаружении данных. Другие приемники активно удаляют данные, используя канал связи из интернета или тому подобного, так что приемники знают биты данных для удаления.
С помощью времени вторичный код в приемнике может быть предварительно совмещен, позволяя удаление кода из сигнала и полного результата интегрирования. Это не настоящее точное время (1 мкс), но оно намного более точное, чем грубое время (2 с). Требованием является время намного лучше, чем 4 мс, например 2 мс.
Без посторонней поддержки часовой кварцевый резонатор 32 кГц в приемнике может иметь стабильность частоты 100 частей на миллион, что может иметь ошибку в 4 мс после 40 секунд. Хорошие приемники могут пытаться предварительно откалибровать свои кварцевые резонаторы, но это очень трудно из-за изменений напряжения между работой и режимом ожидания и неизвестных температурных профилей, не записанных, так как приемник отключен.
Имеется способ получения вторичного кода без посторонней поддержки при полной чувствительности в течение примерно 100 мс. Это хорошо работает в приемниках под управлением программного обеспечения, у которых есть память, но это не осуществимо в нормальных приемниках. Это заключается в записи полных результатов устройства получения данных (4092 IQ пар) в течение 25 последовательных 4-милисекундных периодов. Затем они подвергаются постобработке относительно 25 возможных вторичных сдвигов кода, давая идеальный результат. Однако с 4092×2×25×16 бит это требует 409 кБ памяти на каждый канал получения данных. В типичных применениях могут иметься восемь каналов получения данных, что имеет результатом требование 3,2 МБ памяти.
На фиг.1 показана схема для реализации одного описанного варианта осуществления. Ясно, что на фиг.1 показаны действительные части (I) сигналов и обработка этих действительных частей. Похожая схема и обработка имеются для мнимых частей (Q).
Первый сигнал подается в первый смеситель 101. Первый сигнал может быть Е1С сигналом GNSS системы, такой как GALILEO. Е1С сигнал может быть пилотным сигналом, однако он отличается от существующих пилотных сигналов тем, что Е1С также несет данные. Первый сигнал может включать в себя несущую, первичный код расширения спектра с и данные, и может быть на С-канале. Частота Е1С сигнала относительно неизвестна из-за эффекта Доплера спутника, эффекта Доплера пользователя и погрешностей опорного генератора синхроимпульсов. Частота сигнала может быть представлена как F+х, где х может быть положительной или отрицательной величиной. F представляет собой частоту, с которой спутник намеревается передавать сигнал, а х представляет собой погрешность от одного или более упомянутых выше факторов или любого другого фактора.
Первый смеситель 101 смешивает Е1С сигнал с известным кодом с расширения спектра. Выходной сигнал первого смесителя 101 подается в первый коррелятор 102. Первый коррелятор 102 коррелирует выходной сигнал первого смесителя 102 с известным кодом с расширения спектра.
Выходной сигнал первого коррелятора 102 подается в третий смеситель 103 и В-С блок 108.
Также на фиг.1 второй сигнал подается во второй смеситель 105. Аналогичным образом второй сигнал может быть Е1В сигналом GNSS системы, такой как GALILEO. E1B сигнал может быть сигналом данных. Второй сигнал может включать в себя несущую, первичный код b расширения спектра и данные, и может быть на В-канале. Частота Е1В сигнала такая же, что и частота Е1С сигнала. Второй смеситель 105 смешивает Е1В сигнал с известным кодом d расширения спектра. Выходной сигнал второго смесителя 105 подается во второй коррелятор 106. Второй коррелятор 102 коррелирует выходной сигнал второго смесителя 106 с известным кодом b расширения спектра.
Выходной сигнал второго коррелятора 106 подается в блок 107 задержки. Блок 107 задержки задерживает выходной сигнал второго коррелятора 106 так, что данные, переносимые в этом сигнале, задерживаются на один символ. Выходной сигнал блока 107 задержки подается в третий смеситель 103 и в В-С блок 108. В GALILEO, только с одним периодом кода на символ, нет сложностей с началом и концом символа, так как это то же самое, что код для элемента дискретизации коррелятора, который дает максимальную мощность. Третий смеситель 103 смешивает выходной сигнал первого коррелятора 102 с выходным сигналом блока 107 задержки. На фиг.1 третий смеситель 103 в качестве входного сигнала имеет действительные компоненты. Следует понимать, что обработанные аналогичным образом Q компоненты (не показано) также будут подаваться в смеситель 103. Следовательно, смеситель 103 обеспечивает полное комплексное умножение.
Сигналы, поданные в третий смеситель 103, несут частотные компоненты от несущего сигнала, включая сдвиги частоты и смещения, обусловленные вышеупомянутыми факторами. На практике Е1С и E1В сигналы, поданные в первый и второй смесители, уже преобразованы с понижением частоты, чтобы содержать только частоту х смещения, а не частоту F несущей. Однако в некоторых вариантах осуществления компонент частоты F несущей не может быть удален.
Сигнал, поданный в третий смеситель 103, также включает в себя идентичные данные, переносимые в каждом сигнале. Блок 107 задержки выравнивает данные, переносимые на E1В, с данными, переносимыми на Е1С. Данные на выходе блока 107 задержки являются символом данных, запаздывающим вследствие задержки и, следовательно, совмещенным с задержанными данными на Е1С-канале.
Третий смеситель 103 смешивает выходной сигнал первого коррелятора 102 и выходной сигнал блока 107 задержки. Смешивание данных, переносимых в обоих входных сигналах, эффективно удаляет данные из смеси. Это происходит потому, что выровненные данные в обоих сходных сигналах эффективно возводятся в квадрат и становятся по существу равными единице.
Выходной сигнал третьего смесителя 103 подается в третий коррелятор 104, где он интегрируется с получением амплитуды и фазы обратной связи для отслеживания кода и частоты сигнала, полученного GNSS приемником, в котором могут быть реализованы варианты осуществления.
Процесс IQmix является формой умножения между каждым выходным дискретным сигналом коррелятора и предыдущим выходным дискретным сигналом. Это достигается за счет задержки, которая сохраняет предыдущий дискретный сигнал доступным.
Простейшим случаем является просто I.I′+Q.Q′, скалярный выходной сигнал. Однако выгодным является реализация полного комплексного умножения с комплексной сопряженной величиной предыдущего дискретного сигнала, что дает полный комплексный выходной сигнал, угол фазы которого представляет собой остаточное вращение или частоту сигнала. Для постоянной частоты это, таким образом, постоянная величина, которая может быть проинтегрирована.
При использовании IQmix на 20 отдельных периодах дискретизации кода сигнала СА кода при передаче каждого бита данных выходной сигнал инвертируется на один период. Статистически это один отрицательный период каждый 40 мс, то есть выход составляет 38/40, незначительная потеря в дБ.
При работе с 20 мс периодами нет никаких потерь, если только не принимается ошибочное решение, когда бит данных является определенным и удаленным до интегрирования.
За счет введения задержки в В-канал приемника данные в В- и С-канале теперь выровнены. Следовательно, IQmix может быть выполнен посредством смесителя 103 с использованием сигнала на В-канале из блока 107 задержки и сигнала на С-канале из коррелятора 102. Таким образом, схема IQmix видит сигнал в момент времени n и в момент времени n-1 и, таким образом, измеряет разность фаз и, таким образом, частоту. Однако компонент данных в каждом из них был выровнен и является тем же самым, приводя (данные возведены в квадрат) к результату, который всегда равен +1 и, таким образом, игнорируется. Данные равны или +1, или -1.
Эта обратная связь по амплитуде и фазе может быть использована для более точного удаления частотной составляющей из полученного сигнала. Другими словами, обработка может быть сфокусирована на частоте, на которой фактически принимается сигнал, а не на более широком диапазоне ожидаемой частоты со связанным с этим диапазоном ошибки.
Выходной сигнал IQmix является постоянным во времени, что является амплитудой, представляющей амплитуду сигнала (постоянный ток, униполярный скалярный) (плюс шум, который является переменным током, то есть биполярным), и его фаза отображает частоту (также постоянный ток, униполярный скалярный, несущий шум, который является переменным током/биполярным).
Таким образом, амплитуда и фаза могут быть проинтегрированы без пределов иных, чем динамические свойства автомобиля и генератора синхроимпульсов, так что шумовая составляющая в них, будучи отцентрированной относительно нуля, в среднем становится равной нулю.
Выходной сигнал первого коррелятора 102 и выходной сигнал блока 107 задержки также подаются в В-С блок 108. В-С блок может использоваться для нахождения разности между выходным сигналом второго коррелятора 102 и выходным сигналом блока задержки 107. Входные сигналы В-С блока несут идентичную информацию несущей. Другими словами, оба входных сигнала несут идентичные величины частоты и смещения, и они аннулируются В-С блоком 108. В-С блок извлекает данные из двух входных сигналов и выдает сигнал данных.
Таким образом, В-С блок 108 видит входные сигналы с одинаковыми данными и, при правильном отслеживании с нулевой погрешностью частоты, одну и ту же фазу несущей. Однако они имеют независимые составляющие шума, как из-за того, что они прошли как через различные коды сжатия, так и различные временные интервалы, давая улучшенное на 3 дБ отношение сигнал/шум как для извлечения данных, так и для операций PLL в случае необходимости.
В-С блок 108 суммирует энергию входного сигнала с С-канала и входного сигнала с В-канала. Как уже обсуждалось, эти входные сигналы имеют идентичные данные, но независимые шумы и, таким образом, В-С блок удваивает сигнал, но не шумы, давая улучшение отношения сигнал/шум. В некоторых вариантах осуществления данные на С-канале передаются инвертированными, таким образом, В-С блок 108 может быть В+(-С) блоком. В вышеописанном способе совместно использованная частота несущей Е1С и Е1В сигналов позволяет воспользоваться преимуществом быстрого и точного входа в связь и отслеживания спутника без необходимости получения второго сигнала.
Некоторые приложения, прежде всего приложения, которые являются стационарными, могут требовать пилотный сигнал. Пилотный сигнал является сигналом, который не несет никаких данных и, таким образом, может быть проинтегрирован в течение длительного периода времени для очень точного определения положения. Однако в вариантах осуществления как Е1С сигнал, так и Е1В сигнал несут данные, делая их непригодными в качестве пилотного сигнала.
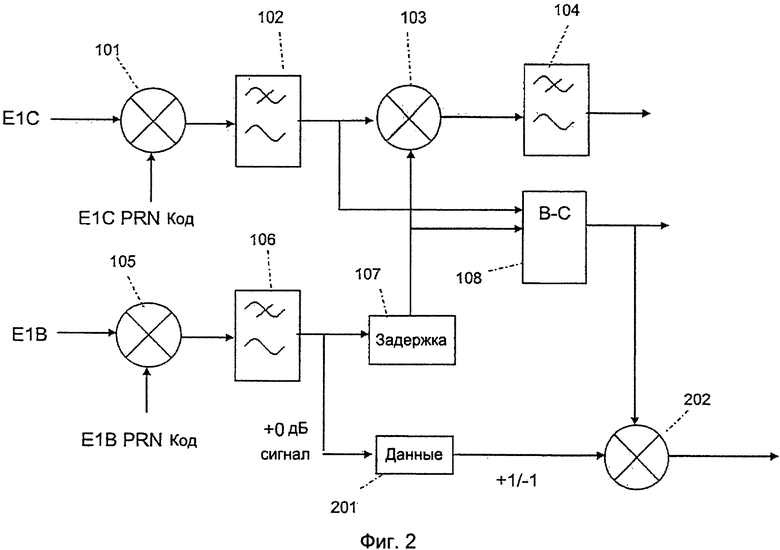
На фиг.2 показано, как пилотный сигнал может быть получен в вариантах осуществления.
На фиг.2 показан первый сигнал Е1С, подаваемый в первый смеситель 101. Первый смеситель 101 имеет еще один вход известного кода с расширения спектра. Выходной сигнал первого смесителя подается в первый коррелятор 102. Выходной сигнал первого коррелятора 102 подается в третий смеситель 103 и В-С блок 108.
На фиг.2 показан также сигнал Е1В, подаваемый во второй смеситель 105. Второй смеситель 105 имеет еще один вход известного кода b расширения спектра. Выходной сигнал второго смесителя подается во второй коррелятор 106. Выходной сигнал коррелятора 106 подается в блок 107 задержки. Выходной сигнал блока 107 задержки подается в третий смеситель 103 и в В-С блок 107.
Выходной сигнал третьего смесителя 103 подается в третий коррелятор 104.
Понятно, что вышеназванные компоненты на фиг.2 те же самые, что и на фиг.1, и функционируют подобным образом, следовательно, в отношении вышеназванных компонентов не будут даны никакие дополнительные пояснения.
Выходной сигнал второго коррелятора 106 подается в блок 201 данных. Блок 201 данных обеспечивает подачу сигнала в четвертый смеситель 202. Выходной сигнал В-С блока 108 также подается в четвертый смеситель 202. Выход четвертого смесителя 202 дает пилотный сигнал.
Таким образом, если пользователи нуждаются в свободном от наследственности пилотном сигнале, он может быть создан либо из (В-С) потока с улучшением качества сигнала на 3 дБ, либо традиционным удалением данных. В этом случае данные могут быть удалены из выходного В-С потока, оставляя чистый пилотный сигнал.
Однако если требуется пилотный сигнал в стиле аппаратного приемника, без задержки, данные могут быть извлечены только из В-канала, как показано на фиг.2. Это не дает преимущества усиления в 3 дБ, однако доступно раньше приходящего потока С-канала. Приходящий поток С-канала затем может быть умножен на символ данных из В-канала и накоплен. Использованный поток может быть чистым С-потоком или он может быть, как показано, также В-С потоком. В-С поток менее шумный, сильнее на 3 дБ, однако вследствие встроенной задержки в В вкладе в несущую может быть слегка менее быстро реагирующим в высокодинамичных операциях. Это обычно не является проблемой при поиске.
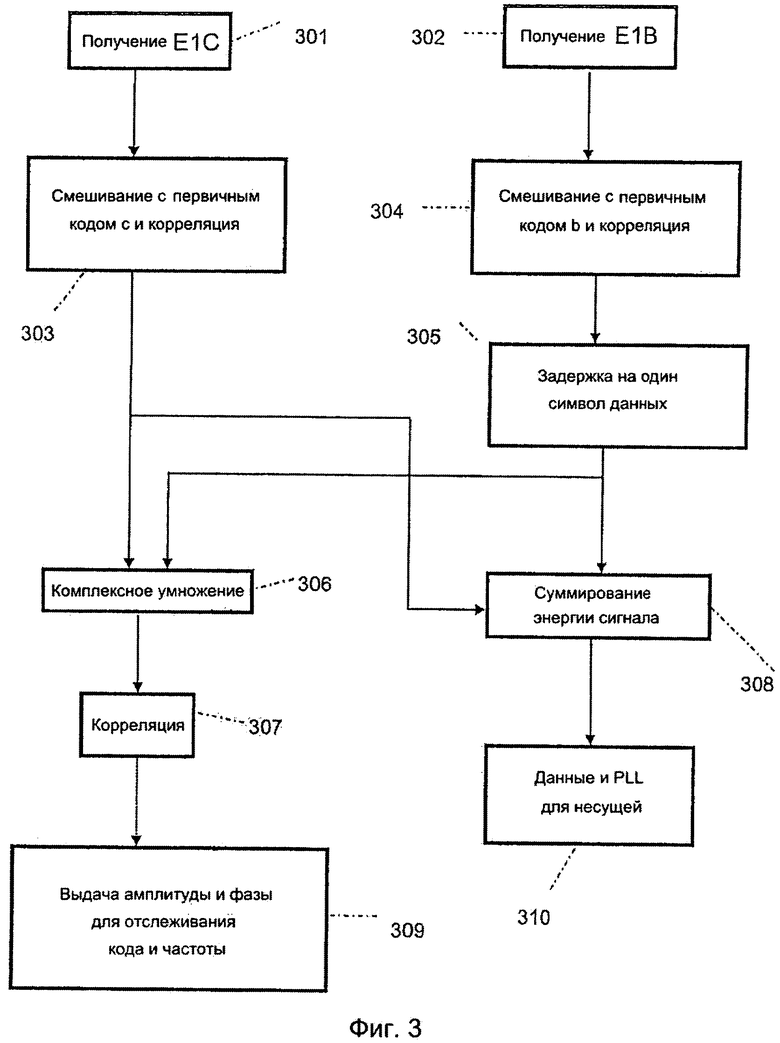
На фиг.3 показан способ, выполненный в соответствии с некоторыми вариантами осуществления.
На шаге 301 Е1С сигнал получают на С-канале. Этот сигнал смешивают и коррелируют с известным первичным кодом с расширения спектра на шаге 303.
На шаге 302 Е1В сигнал получают на В-канале. Этот сигнал смешивают и коррелируют с известным первичным кодом b расширения спектра на шаге 305, а затем задерживают на один символ данных на шаге 305.
Коррелированный сигнал из шага 303 и задержанный коррелированный выходной сигнал из шага 304 комплексно умножают на шаге 306. Комплексно умноженный выходной сигнал шага 306 коррелируют на шаге 307. Шаги 306 и 307 обеспечивают IQmix сигнала Е1С и задержанного сигнала Е1В в соответствии с вышеприведенным описанием.
Коррелированные на шаге 307 сигналы затем на шаге 309 выдают как амплитуду и фазу для отслеживания кода и частоты.
Коррелированный выходной сигнал из шага 303 и задержанный коррелированный выходной сигнал из шага 305 суммируют так, что энергия каждого входного сигнала суммируется на шаге 308, где суммируется энергия каждого входного сигнала. Это может быть выполнено В-С блоком 108 из фигур 1 и 2. Выходной сигнал шага 310 обеспечивает сигнал данных и PLL (петля фазовой синхронизации) сигнал для несущего сигнала.
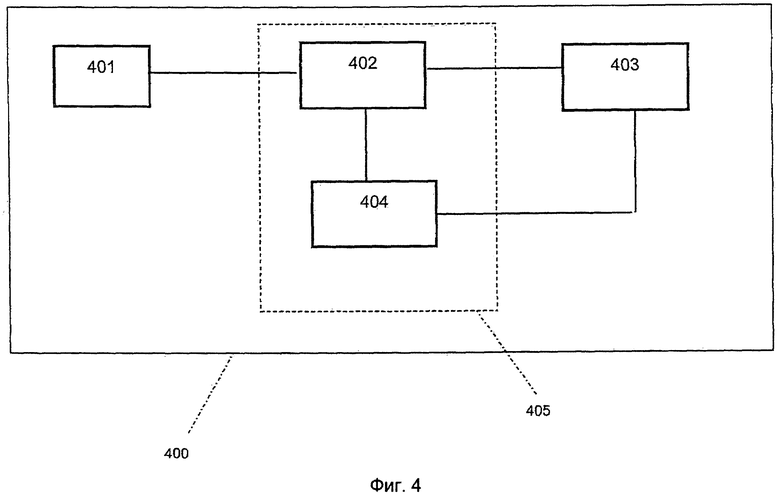
Фиг.4 представляет блок-схему примера приемника в соответствии с одним вариантом осуществления.
GNSS приемник 400 может быть GALILEO приемником или приемником для любой другой GNSS системы. GNSS приемник 400 содержит приемник 401 сигнала, который может получать сигналы спутников в GNSS системе. Приемник 401 сигнала может выполнять основную обработку сигнала, такую как, например, фильтрование и преобразование с понижением частоты, чтобы предоставить сигнал в подходящей форме для блока 402 получения и отслеживания. Блок получения и отслеживания может осуществлять способ в соответствии с фигурой 3 или обработку в соответствии с фиг.1 и/или фиг.2.
Приемник 401 сигнала также содержит блок 404 вычисления положения для GNSS приемника 400. GNSS приемник 400 может дополнительно иметь память 403, которая может быть использована блоком 402 получения и отслеживания и блоком 404 вычисления положения.
Понятно, что отдельные блоки 402 и 404 могут иметь отдельную память или совместно использовать память с другими обрабатывающими блоками. Понятно также, что функциональные блоки, расположенные внутри пунктирной линии 405, могут быть реализованы на одном процессоре. Понятно, что могут быть использованы несколько процессоров. Понятно, что вышеописанный способ может быть выполнен на одной или нескольких интегральных схемах.
Следует понимать, что в сопутствующих рисунках все элементы присутствуют в I и Q. Для простоты показаны только действительные составляющие.
Некоторые варианты осуществления содержат первый сигнал и второй сигнал, как описано ранее. Так, первый сигнал может содержать несущую, первичный код с расширения спектра и данные, и может быть на С-канале.
Второй сигнал может содержать несущую, первичный код b расширения спектра и данные, и может быть на В-канале. Данные первого канала те же самые, что и второго канала, но задержаны на один символ. Следует иметь в виду, что в альтернативных вариантах осуществления задержка может быть на n символов. N может быть целым числом, равным или больше 1.
Некоторые варианты осуществления изобретения содержат передатчик, выполненный для передачи первого и второго сигнала, описанных выше, и/или схему управления, выполненную для управления передатчиком для передачи первого и второго сигналов. Передатчик может быть предоставлен спутником или передатчиком на Земле.
Любой канал может быть задержан на спутнике. В описанных вариантах осуществления С-канал является задержанным. В альтернативных вариантах осуществления может быть задержанным В-канал.
Кроме того, варианты осуществления настоящего изобретения были описаны в основном в контексте получения данных из сигнала спутниковой навигации. Однако следует понимать, что варианты осуществления настоящего изобретения могут быть использованы для обработки любых двух или более сигналов, передаваемых от общего источника на одной и той же частоте несущей, но с различными кодами расширения спектра.
Варианты осуществления изобретения были в контексте получения и отслеживания сигнала. Особые преимущества могут быть достигнуты в контексте получения. Следует иметь в виду, что другие варианты осуществления могу быть применимы к любым другим подходящим сигналам.
Изобретение относится к технике связи и может использоваться в беспроводных системах связи. Технический результат состоит в повышении надежности передачи. Для этого аппарат для приема навигационных сигналов содержит первый коррелятор, выполненный для корреляции первого канала с первым кодом для обеспечения первого выходного сигнала, причем первый канал имеет частоту несущей и данные, второй коррелятор, выполненный для корреляции второго канала со вторым кодом для обеспечения второго выходного сигнала, причем второй код отличается от первого кода, а второй канал имеет такую же частоту несущей, что и первый канал, и такие же данные, что и первый канал. 6 н. и 13 з.п. ф-лы, 4 ил.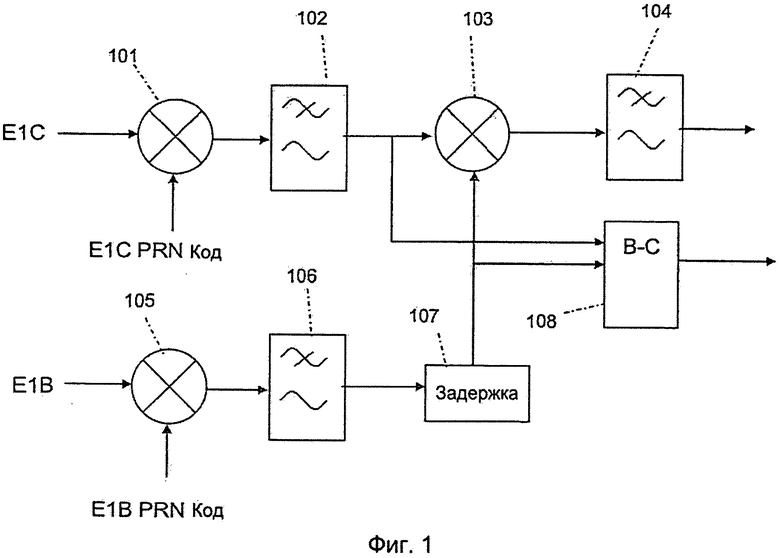
1. Аппарат для приема навигационных сигналов, содержащий:
- первый коррелятор (102), выполненный для корреляции первого канала (Е1С) с первым кодом (Е1С PRN) для обеспечения первого выходного сигнала, причем первый канал имеет частоту несущей и данные,
- второй коррелятор (106), выполненный для корреляции второго канала (Е1В) со вторым кодом (Е1В PRN) для обеспечения второго выходного сигнала, причем второй код отличается от первого кода, а второй канал (Е1В) имеет такую же частоту несущей, что и первый канал (Е1С), и такие же данные, что и первый канал, причем каждая из действительной (I) и мнимой (Q) частей второго выходного сигнала задержаны относительно соответствующих частей первого выходного сигнала так, что данные на втором канале задержаны относительно данных на первом канале, и
- процессор (103, 104), выполненный для обработки первого и задержанного второго выходных сигналов, причем данные на первом выходном сигнале выровнены с задержанным вторым выходным сигналом для обеспечения частотной информации о несущей.
2. Аппарат по п. 1, содержащий блок (107) задержки, выполненный для задержки второго выходного сигнала и подачи задержанного второго выходного сигнала к процессору так, что данные в задержанном втором выходном сигнале выровнены с данными в первом канале.
3. Аппарат по п. 1, в котором данные во втором канале задержаны относительно данных в первом канале на один символ.
4. Аппарат по п. 2, в котором данные во втором канале задержаны относительно данных в первом канале на один символ.
5. Аппарат по любому из предшествующих пунктов, в котором частотная информация включает информацию о фазе, содержащую разность фаз между несущей первого канала и несущей второго канала.
6. Аппарат по любому из пп. 1-4, также содержащий схему (108) восстановления данных, выполненную с возможностью использования для получения первого и второго выходного сигнала и использования для комбинирования первого и второго выходных сигналов и выдачи сигнала данных, на основе разности, репрезентативного для данных.
7. Аппарат по п. 5, также содержащий схему (108) восстановления данных, выполненную с возможностью использования для получения первого и второго выходного сигнала и использования для комбинирования первого и второго выходных сигналов и выдачи сигнала данных, на основе разности, репрезентативного для данных.
8. Аппарат по п. 6, в котором второй канал имеет смеситель (202), выполненный с возможностью использования для извлечения пилотного сигнала из выходного сигнала второго коррелятора.
9. Аппарат по п. 7, в котором второй канал имеет смеситель (202), выполненный с возможностью использования для извлечения пилотного сигнала из выходного сигнала второго коррелятора.
10. Интегральная схема для приема навигационных сигналов, содержащая аппарат по любому из предшествующих пунктов.
11. Устройство спутниковой навигации, имеющее аппарат по любому из пп. 1-9.
12. Мобильное устройство связи, имеющее аппарат по любому из пп. 1-9.
13. Способ для приема навигационных сигналов, включающий в себя:
- коррелирование (304) первого канала принятого сигнала с первым кодом для обеспечения первого выходного сигнала, причем первый канал имеет частоту несущей и данные,
- коррелирование (303) второго канала принятого сигнала со вторым кодом для обеспечения второго выходного сигнала, причем второй код отличается от первого кода, а второй канал имеет такую же частоту несущей, что и первый канал, и такие же данные, что и первый канал, причем каждая из действительной (I) и мнимой (Q) частей второго выходного сигнала задержаны относительно соответствующих частей первого выходного сигнала так, что данные на втором канале задержаны относительно данных на первом канале,
- обеспечение частотной информации (309) о несущей путем обработки первого и задержанного второго выходных сигналов, причем данные первого выходного сигнала выровнены с задержанным вторым выходным сигналом.
14. Способ по п. 13, включающий в себя задержку (305) второго выходного сигнала так, что данные в задержанном втором выходном сигнале выровнены с данными в первом канале, и обработку задержанного второго сигнала.
15. Способ по п. 13, в котором данные во втором канале задерживают относительно данных в первом канале на один символ.
16. Способ по любому из пп. 12-15, в котором частотная информация включает информацию о фазе, содержащую разность фаз между несущей первого канала и несущей второго канала.
17. Способ по любому из пп. 12-15, также включающий в себя:
- получение первого и второго выходных сигналов посредством схемы восстановления данных, объединение первого и второго выходных сигналов и выдачу сигнала данных, репрезентативного для данных, и
- извлечение пилотного сигнала из второго выходного сигнала посредством смесителя.
18. Способ по п. 16, также включающий в себя:
- получение первого и второго выходных сигналов посредством схемы восстановления данных, объединение первого и второго выходных сигналов и выдачу сигнала данных, репрезентативного для данных, и
- извлечение пилотного сигнала из второго выходного сигнала посредством смесителя.
19. Навигационный сигнал, включающий в себя первый канал, имеющий первый код, частоту несущей и данные, и второй канал, имеющий второй код, отличающийся от первого кода, такую же частоту несущей, что и первый канал, и те же данные, что и первый канал, причем каждая из действительной (I) и мнимой (Q) частей второго выходного сигнала задержаны относительно соответствующих частей первого выходного сигнала так, что данные на втором канале задержаны относительно данных на первом канале.
| US 6239743 B1, 29.05.2001 | |||
| ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА И СПОСОБ ЕЕ ФОРМИРОВАНИЯ | 1991 |
|
RU2108621C1 |
| Устройство для глубокой очистки сточных вод | 1989 |
|
SU1724602A1 |
| WO 2010093646 A1, 19.08.2010 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

