ОБЛАСТЬ ТЕХНИКИ И ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Изобретение относится к области геолокации. Более конкретно, оно относится к процессу дистанционного определения абсолютного азимута целевой точки с использованием наземных средств.
Дистанционное определение абсолютного азимута целевой точки с использованием наземных средств может быть выполнено различным образом.
Одно из решений заключается в установлении исходной географически привязанной базы данных, такой как карта или Цифровая Модель Местности ЦММ (DTM). Целевую точку в этом случае связывают с точкой в географически привязанной базе данных, при этом координаты целевой точки, в частности ее абсолютный азимут, соотносятся с заданной привязкой, т.е. они известны.
В отсутствие такой исходной географически привязанной базы данных, известно несколько решений для получения точки привязки абсолютного направления, т.е. привязки направления относительно геоцентрированной системы отсчета, такой как магнитный север:
- магнитный компас, недостаточная точность которого в сочетании с его высокой чувствительностью к электромагнитным помехам препятствуют точному определению курса;
- наблюдение звезд, которое требует чистого неба и в случае звезд может быть использовано только ночью;
- точные приборы, такие как североискатель, например гиротеодолит, которые могут быть дороги, тяжелы и хрупки в обращении.
Эти недостатки легли в основу развития технических приемов дистанционного определения, обеспечивающих дистанционное определение координат целевой точки с использованием привязки по относительному азимуту и таким образом преодолевающих вышеупомянутые недостатки.
Первый подход предполагает использование ориентиров, координаты которых заранее известны и относительно которых может быть определен относительный азимут относительно системы отсчета, центрированной по наблюдателю. Этот подход применим, только если ориентиры присутствуют вблизи цели и если их координаты известны в дополнение к координатам наблюдателя. Для того чтобы это обеспечить, в указанном случае необходимо увеличить количество ориентиров с известными координатами настолько, насколько это возможно, что предполагает создание картографической или цифровой модели местности со связанными с этим недостатками.
Этот подход в частности ограничен известным окружением, поскольку требует исходного знания координат ориентиров.
Другой подход заключается в сохранении абсолютной азимутальной привязки в мобильной единице оборудования. В течение первой фазы, эту азимутальную привязку получают с помощью точного прибора, такого как североискатель, а затем передают на мобильную единицу оборудования.
В течение второй фазы азимутальную привязку сохраняют в мобильной единице оборудования, в то время как последняя передвигается, за счет оценивания произошедшего изменения ориентации с помощью датчиков, например внутренних датчиков. Абсолютный азимут целевой точки при этом определяют на основе указанной абсолютной азимутальной привязки.
Ошибки считывания оцениваемого положения цели для высокоточного оборудования не превышают десяти метров.
К сожалению, обеспечивающее высокую точность оборудование слишком тяжело, громоздко и дорого для установки в используемом в настоящее время мобильном оборудовании, таком как бинокль.
Кроме того, изначальная фаза оценивания привязки (включая калибровку датчиков и конвергенцию процесса фильтрации) занимает несколько минут и качество этой привязки быстро снижается во время второй фазы сохранения и эксплуатации, в частности, когда мобильная единица оборудования передвигается.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Изобретение предлагает решение, преодолевающее, по меньшей мере, один или предпочтительно все указанные недостатки.
В частности, оно нацелено на точное и дистанционное определение абсолютного азимута целевой точки с использованием наземных средств посредством простого оборудования, без необходимости считывания исходных данных об окружении цели.
Кроме того, признаки изобретения подразумевают упрощение реализации с помощью относительно недорогого, крепкого и простого в использовании оборудования.
Для достижения указанной цели, изобретение предполагает способ создания банка изображений, географически привязанного по абсолютному азимуту только из первой точки, и использования этого банка изображений в качестве азимутальной привязки из второй точки, имеющей видимое окружение, по меньшей мере, частично совпадающее с видимым окружением первой точки.
Согласно первому аспекту, изобретение относится к способу удаленного определения абсолютного азимута целевой точки, в котором:
- получают первую серию изображений с помощью первой единицы оборудования, содержащую, по меньшей мере, одно изображение первого видимого окружения из первой позиции, координаты местоположения которой известны,
- связывают элементы этих изображений со значениями абсолютного азимута в системе отсчета, центрированной по указанной первой позиции,
- создают первую базу данных изображений, связанную с координатами местоположения первой позиции,
- передают указанную первую базу данных изображений на вторую единицу оборудования, указанная вторая единица оборудования сохраняет указанную первую базу данных изображений,
- получают вторую серию изображений с помощью второй единицы оборудования, содержащую, по меньшей мере, одно изображение второго видимого окружения из второй позиции, координаты местоположения которой известны и из которой видна целевая точка,
- определяют, по меньшей мере, одну точку соответствия между первой базой данных изображений и, по меньшей мере, одним изображением второй серии изображений, указанная, по меньшей мере, одна точка соответствия соответствует общему элементу, присутствующему в обоих - первом и втором визуальном окружении,
- приписывают абсолютный азимут общему элементу в системе отсчета, центрированной по второй позиции,
- определяют относительный азимут целевой точки относительно указанного общего элемента в системе отсчета, центрированной по второй позиции,
- определяют абсолютный азимут целевой точки в системе отсчета, центрированной по второй позиции, путем использования абсолютного азимута, приписанного общему элементу, в системе отсчета, центрированной по второй позиции, и относительного азимута целевой точки относительно указанного элемента в системе отсчета, центрированной по второй позиции.
Кроме того, может быть получено расстояние между общим элементом и второй позицией, чтобы приписать абсолютный азимут общему элементу в системе отсчета, центрированной по второй позиции.
Согласно второму аспекту изобретение относится к способу дистанционного определения координат местоположения целевой точки, в котором:
- определяют абсолютный азимут целевой точки в системе отсчета, центрированной по второй позиции, согласно описанному выше способу,
- получают расстояние между второй позицией и целевой точкой,
- определяют координаты местоположения целевой точки с помощью абсолютного азимута целевой точки в системе отсчета, центрированной по второй позиции, известных координат второй позиции и расстояния между второй позицией и целевой точкой.
Предпочтительно, изобретение дополнено следующими признаками, которые могут быть осуществлены отдельно или в любой технически возможной комбинации:
- расстояния определяют посредством телеметрии;
- точку соответствия между базой данных изображений и второй серией изображений определяют методом стерео видения с широкой базой;
- определение относительного азимута целевой точки относительно указанного общего элемента в системе отсчета, центрированной по второй позиции, осуществляют посредством анализа, по меньшей мере, одного изображения из второй серии изображений;
- определение относительного азимута целевой точки относительно указанного общего элемента в системе отсчета, центрированной по второй позиции, осуществляют посредством акселерометра и/или скоростного гироскопа;
- координаты местоположения первой и второй позиций определяют посредством спутниковой системы позиционирования.
Согласно третьему аспекту изобретение относится к системе дистанционного определения абсолютного азимута целевой точки, содержащей:
- основную единицу оборудования для осуществления этапов описанного выше способа в качестве первой единицы оборудования, содержащую средства получения изображений; и
- мобильную единицу оборудования для осуществления этапов описанного выше способа в качестве второй единицы оборудования, содержащую средства получения изображений.
Кроме того, система может содержать приемник спутниковой системы позиционирования.
Система может также включать основную единицу оборудования для дистанционного определения абсолютного азимута целевой точки, выполненную с возможностью осуществления этапов описанного выше способа в качестве первой единицы оборудования и содержащую:
- средства аккумулирования энергии,
- средства получения изображений и память для получения первой серии изображений, содержащей, по меньшей мере, одно изображение первого видимого окружения из первой позиции;
- средства определения абсолютного азимута и обработки изображений для связывания элементов указанных изображений со значениями абсолютного азимута в системе отсчета, центрированной по первой позиции, и создания первой базы данных изображений;
и средства для передачи указанной первой базы данных изображений второй единицы оборудования.
Кроме того, основная единица оборудования может содержать североискатель.
Система может также включать мобильную единицу оборудования для дистанционного определения абсолютного азимута целевой точки, выполненную с возможностью осуществления этапов описанного выше способа в качестве второй единицы оборудования и содержащую:
- средства аккумулирования энергии,
- средства приема и память для приема и хранения первой базы данных изображений;
- средства получения изображений для получения второй серии изображений, содержащей, по меньшей мере, одно изображение второго видимого окружения второй позиции, из которой видна точка,
- средства обработки изображений и вычислительные средства для:
- определения, по меньшей мере, одной точки соответствия между первой базой данных изображений и, по меньшей мере, одним изображением второй серии изображений и приписывания абсолютного азимута, по меньшей мере, одному элементу, по меньшей мере, одного изображения второй серии изображений в системе отчета, центрированной по второй позиции,
- определения относительного азимута целевой точки относительно указанного элемента в системе отсчета, центрированной по второй позиции,
- определения абсолютного азимута целевой точки в системе отсчета, центрированной по второй позиции, путем использования абсолютного азимута, приписанного, по меньшей мере, одному элементу, по меньшей мере, одного изображения второй серии изображений и относительного азимута цели относительно указанного элемента.
Кроме того, мобильная единица оборудования может содержать акселерометр и/или скоростной гироскоп в дополнение к графическим и визуальным средствам человеко-машинного интерфейса, обеспечивающим возможность оператору указанной второй единицы оборудования вмешиваться в дистанционное определение абсолютного азимута целевой точки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прочие отличия, цели и преимущества изобретения отражены в нижеследующем описании, которое приведено только в иллюстративных целях и не предназначено для ограничения изобретения. Его следует читать со ссылками на прилагаемые иллюстрации, среди которых
На фиг.1 представлена одна из реализаций предлагаемого изобретения.
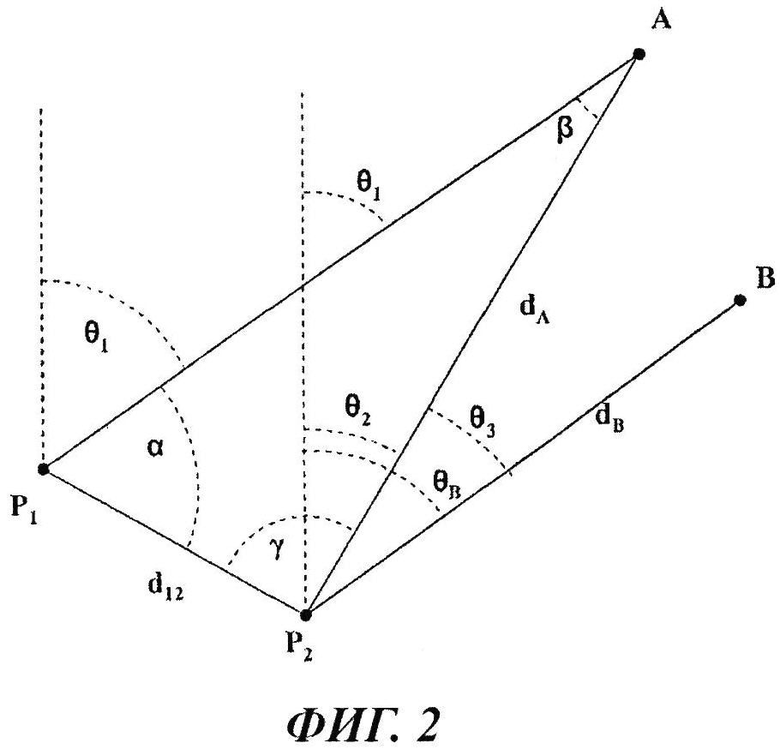
На фиг.2 представлена схема одного из примеров геометрических соотношений, используемых в изобретении.
На фиг.3а и фиг.3b представлены возможные компоненты системы согласно изобретению.
На фиг.4 представлена диаграмма, иллюстрирующая этапы способа согласно изобретению.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Из первой позиции P1, используя первую единицу 1 оборудования, получают S1 первую серию изображений первого видимого окружения. Эта первая серия изображений содержит, по меньшей мере, одно изображение и нацелена на покрытие всего или части видимого окружения первой позиции, т.е. ландшафта, окружающего первую позицию P1. Впрочем, изображения могут быть предназначены и для покрытия только определенных элементов первого видимого окружения, например таких заметных элементов, как гора, или просто элементов в направлении второй позиции P2. При этом первая единица 1 оборудования содержит необходимые для выполнения этой задачи средства, т.е. в частности средства получения изображений, такие как цифровое фотографическое устройство.
Предпочтительно, эти средства получения изображений могут получать изображения в видимом оптическом излучении, впрочем, также в электромагнитном излучении других диапазонов длин волн, таких как инфракрасный или ультрафиолетовый.
Положение первой позиции P1 известно, например, благодаря использованию приемника спутниковой системы позиционирования, такой как GPS. Такой приемник может входить в состав первой единицы 1 оборудования или быть от нее независимым.
Первая единица 1 оборудования также содержит элементы для определения абсолютного азимута элементов первой серии изображений в системе отсчета, центрированной по первой позиции P1.
Абсолютный азимут элемента в системе отсчета, центрированной по позиции, устанавливается как угол между
- первой прямой, проходящей через указанную позицию (например, первую позицию P1) вдоль направления привязки, такого как Север, и
- второй прямой, проходящей через указанную позицию (например, первую позицию P1) и указанный элемент.
Таким образом, первая единица 1 оборудования может, например, содержать североискатель или любые другие средства, обеспечивающие возможность производить надежные и точные измерения.
Элементы указанных изображений первой серии изображений связывают S2 с соответствующим абсолютным азимутом. Этими элементами могут быть, например, элементы, выбранные в ходе анализа изображений в связи с их характеристиками, например высоким контрастом или опознаваемой контурной линией. Могут быть использованы алгоритмы определения и извлечения видимых деталей. Таким образом, все пиксели могут быть связаны с абсолютным азимутом, что и требуется. Такое связывание элементов с их соответствующим абсолютным азимутом предпочтительно выполнять автоматически.
Кроме того, другие датчики, например уклономер, могут быть использованы для предоставления дополнительных данных относительно условий экспозиции, которые также могут быть связаны с элементами изображения.
Первая единица 1 оборудования не обязательно должна быть легкой или быстрой, поскольку она не предназначена для передвижения или использования для слежения за целью. Это может быть единица 1 оборудования, используемая на фазе подготовки.
Таким образом, эта единица оборудования может быть квалифицирована как основное оборудование. Оно, например, может поддерживаться штативом для улучшения стабильности. Один из примеров основной единицы оборудования, которое может быть использовано для осуществления этапов способа согласно изобретению в качестве первой единицы оборудования, изображен на фиг.3a. Таким образом, первая единица 1 оборудования может являться основной единицей 1 оборудования, предпочтительно снабженной памятью, средствами для передачи базы данных, средствами аккумулирования энергии, а также средствами получения изображений и обработки.
Первую базу данных при этом создают S3 средствами первой единицы 1 оборудования или независимым устройством, таким как компьютер, которым первая единица 1 оборудования передает первую серию изображений. Первую базу данных создают из первой серии изображений. Координаты местоположения первой позиции P1 также связывают с первой базой данных и интегрируют в нее. Первая база данных может быть улучшена методами уменьшения ошибок, оптимизации памяти, предобработки или наложения изображений.
Кроме того, база данных может быть дополнена информацией, относящейся к условиям получения изображений, составляющих эту базу данных, например, информацией о крене и высоте, полученной с помощью датчиков первой единицы 1 оборудования, таких как акселерометр. Критерии качества изображений могут быть также связаны с первой базой данных.
Первую базу данных изображений затем передают S4 на вторую единицу 2 оборудования посредством проводной или беспроводной связи или любыми другими средствами для передачи данных, такими как поддержка данных. Первая единица 1 оборудования при этом содержит средства для передачи указанной первой базы данных изображений на вторую единицу оборудования, эта передача, впрочем, может быть выполнена и другим устройством, например компьютером.
Указанная вторая единица 2 оборудования является мобильной и персональной. Таким образом, она может считаться мобильной единицей оборудования для дистанционного определения абсолютного азимута целевой точки, подходящей для осуществления этапов способа согласно изобретению в качестве второй единицы оборудования.
Таком образом, изобретение относится к системе дистанционного определения абсолютного азимута целевой точки В, содержащей
- основную единицу 1 оборудования для осуществления этапов способа согласно изобретению в качестве первой единицы 1 оборудования, содержащую средства получения изображений; и
- мобильную единицу 2 оборудования для осуществления этапов способа согласно изобретению в качестве второй единицы 2 оборудования, содержащую средства получения изображений.
При этом пользователь второй единицы 2 оборудования может передвигаться со второй единицей оборудования на вторую позицию P2, из которой видна целевая точка В. Исключительно в иллюстративных целях на фиг.3b приведен один из примеров такой единицы мобильного оборудования, в котором вторая единица 2 оборудования выполнена в виде бинокля, предпочтительно снабженного памятью, средствами получения указанной первой базы данных, средствами аккумулирования энергии и средствами получения и обработки изображений. Следуя примеру первой единицы 1 оборудования, принимаемый во внимание спектр электромагнитного излучения может быть шире или уже, чем спектр видимых оптических или инфракрасных волн.
Координаты местоположения второй позиции P2 известны. Положение второй позиции P2 может, в частности, быть определено с помощью приемника спутниковой системы позиционирования, такой как GPS, который может быть интегрирован во вторую единицу 2 оборудования или быть не зависимым от последней.
Затем получают S5 вторую серию изображений с помощью второй единицы 2 оборудования. Эта вторая серия изображений содержит изображения второго видимого окружения второй позиции P2.
По меньшей мере, одно изображение из второй серии изображений при этом сравнивают с первой базой данных изображений для определения S6, по меньшей мере, одной точки соответствия, соответствующей общему элементу A, присутствующему в обоих первом и втором окружении. Указанную точку соответствия определяют посредством реализации метода стерео видения с широкой базой.
Поиск точки соответствия начинают с извлечения деталей изображений. Извлечение этих деталей предпочтительно выполняют автоматически с помощью алгоритмов определения и извлечения видимых деталей, таких как алгоритмы Масштабно-Инвариантной Трансформации Деталей МИТД (SIFT) или же Ускоренной Надежной Детализации УНД (SURF). Таким образом получают дескрипторы деталей изображения.
Как только эти детали извлечены из изображений, они подвергаются картированию данных на основе их дескрипторов, которые были только что вычислены. Для картирования данных для деталей может потребоваться, например, надежная оптимизация и различные специализированные алгоритмы.
Дескрипторы общего элемента, присутствующего на двух изображениях, более или менее инвариантны в соответствии с перспективой и могут быть идентифицированы по их общности, например, по их небольшому Евклидовому расстоянию. Кроме того, соответствие точек должно быть совместимо с эпиполярной геометрией, определенной изображениями, полученными из двух различных позиций. В заключении определяют фундаментальную матрицу, которая составляет соответствие одинаковых элементов на основе двух различных кадров изображения.
При идентификации общего элемента могут также быть использованы технические приемы алгоритмов распознавания формы, основанные на геометрической или радиометрической информации, извлеченной для общего элемента или его окружения в первой серии изображений и во второй серии изображений.
Выполнение такого картирования данных может быть улучшено с помощью датчиков, установленных на борту второй единицы 2 оборудования и предоставляющих информацию об ориентации второй единицы оборудования. В качестве таких бортовых датчиков могут быть использованы, например, магнитные компасы или внутренние датчики. Как было приведено в примере выше, эти датчики не обеспечивают высокий уровень точности. Тем не менее они предоставляют показания для этапа картирования данных, таким образом обеспечивая возможность ускорения процесса картирования данных и/или предотвращения ложных срабатываний.
Для улучшения картирования данных могут быть использованы и другие данные. Например, можно использовать известные координаты первого положения P1 и второго положения P2. Расстояние до деталей может быть получено посредством телеметрии по запросу второй единицы 2 оборудования. Если первая единица 1 оборудования и вторая единица 2 оборудования оснащены уклономером, могут быть также использованы данные об уклоне изображения.
Также посредством человеко-машинного интерфейса для подтверждения результатов поиска общего элемента или даже для предложения общего элемента или выбора последнего из списка потенциально возможных, автоматически составленного согласно вышеупомянутому методу, можно использовать оператора второй единицы 2 оборудования.
Для достижения указанной цели, вторая единица 2 оборудования может содержать графические и визуальные средства человеко-машинного интерфейса, обеспечивающие возможность оператору указанной второй единицы 2 оборудования вмешиваться в реализацию способа согласно изобретению. Эти средства могут быть выполнены, например, в виде сенсорного или обычного экрана, возможно, с контроллерами типа кнопок.
Знание относительных координат местоположения первой позиции и второй позиции P2 позволяет преобразовать абсолютный азимут элемента в первой системе координат, центрированной по первой позиции P1, в абсолютный азимут того же элемента во второй системе координат, центрированной по второй позиции P2.
Как только идентифицирован, по меньшей мере, один общий элемент, присутствующий в первом и втором визуальных окружениях, используют абсолютный азимут θ1, связанный с указанным общим элементом A, или определенный по соседним элементам, в системе отсчета, центрированной по первой позиции Р1, для того, чтобы приписать S7 абсолютный азимут θ2 указанного общего элемента A в системе отсчета, центрированной по второй позиции P2.
В заключение из расчета и разложения ранее определенной фундаментальной матрицы, содержащей информацию о связи между двумя изображениями, может быть определен угол β между прямой, соединяющей первую позицию P1 и общий элемент A, и прямой, соединяющей первую позицию P1 и общий элемент А.
Впрочем, поскольку сумма углов треугольника равна π, β=θ1-θ2, θ2 может быть определен благодаря известности β и θ1. При этом приписывают абсолютный азимут θ2 в системе отсчета, центрированной по второй позиции P2.
Вместо или, предпочтительно, в дополнение к этому методу для улучшения точности приписывания абсолютного азимута в системе отсчета, центрированной по второй позиции P2, может быть использован другой метод. Он предполагает получение расстояния dA между общим элементом A и второй позицией P2. Кроме того, поскольку координаты P1 и P2 известны, может быть определен угол α между прямой, походящей через первую позицию P1 и общий элемент A, и прямой, походящей через первую позицию P1 и вторую позицию P2, в дополнение к расстоянию d12 между первой позицией P1 и второй позицией P2.
Также за счет известности угла α и двух сторон dA и d12 треугольника P1AP2, может быть вычислен угол γ. принадлежащий этому треугольнику и соответствующий углу между прямой, проходящей через первую позицию P1 и вторую позицию P2, и прямой, соединяющей вторую позицию P2 и общий элемент A. Угол, образованный прямой, проходящей через первую позицию P1 и вторую позицию P2, и азимутальной привязкой при этом равен γ-θ2.
Впрочем, этот угол γ-θ2 может быть определен ввиду известности относительных координат местоположения первой позиции P1 и второй позиции P2 в совокупности с известностью привязки абсолютного азимута в общей системе отсчета, в которой выражены координаты местоположения первой позиции P1 и второй позиции P2. Часто указанные координаты местоположения выражены как широта и долгота, а привязкой абсолютного азимута для общей системы отсчета является Север.
Как только определен угол γ-θ2, определяют абсолютный азимут θ2 общего элемента A в системе отсчета, центрированной по P2.
Два вышеописанных метода могут быть использованы отдельно или, предпочтительно, вместе для улучшения точности.
Абсолютный азимут θ2, приписанный общему элементу A в системе отсчета, центрированной по P2, устанавливает привязку элементов второго визуального окружения относительно второй позиции P2. Таким образом, для определения абсолютного азимута θB целевой точки B в системе отсчета, центрированной по P2, остается определить S8 только относительный азимут θ3 целевой точки В относительно общего элемента A в системе отсчета, центрированной по P2.
Этот относительный азимут θ3 целевой точки B может быть определен с помощью датчиков, таких как акселерометр и/или скоростной гироскоп, оценивающих угловое перемещение второй единицы оборудования, когда указанная вторая единица 2 оборудования движется от ориентации, в которой виден общий элемент A, к ориентации, в которой видна целевая точка B. Предпочтительно, вторая единица 2 оборудования содержит средства прицеливания, чтобы его ориентация могла быть установлена таким образом, что средства прицеливания второй единицы 2 оборудования могли иметь оптическую ось, сонаправленную с точкой прицеливания, например, общим элементом A или целевой точкой B.
Вместо этого или, предпочтительно вместе с этим операция обработки изображения может также быть выполнена таким образом, чтобы оценить относительный азимут θ3 по второй серии изображений.
Абсолютный азимут θB целевой точки B, центрированный по второй позиции P2, при этом может быть определен S9 путем использования абсолютного азимута θ2, приписанного общему элементу A, и относительного азимута θ3 целевой точки В относительно указанного элемента в системе отсчета, центрированной по второй позиции P2, например, путем вычисления разности или суммы двух величин.
Как только определен абсолютный азимут θB целевой точки B, центрированный по второй позиции P2, могут быть дистанционно определены координаты местоположения целевой точки B. Для этого:
- получают S10 расстояние dB между второй позицией P2 и целевой точкой B.
- определяют S11 координаты местоположения целевой точки B с помощью абсолютного азимута θB целевой точки B в системе отсчета, центрированной по второй позиции P2, известных координат второй позиции P2 и расстояния dB между второй позицией и целевой точкой В.
Действительно, получение расстояния dB между второй позицией P2 и целевой точкой B, в дополнение к предварительной известности абсолютного азимута θВ целевой точки B в системе отсчета, центрированной по второй позиции P2, позволяет определить положение целевой точки B в указанной системе отсчета. Благодаря известности координат местоположения второй позиции P2, для определения координат местоположения целевой точки B, например ее широты и долготы требуется только изменение системы отсчета, например, на геоцентрированную систему отсчета.
Таким образом, изобретение относится к точному способу дистанционного определения абсолютного азимута или координат местоположения целевой точки B и/или способу, требующему меньше данных, чем известные из уровня техники и приведенные выше способы, и при этом определяющему координаты местоположения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| СИСТЕМЫ И СПОСОБЫ ОТСЛЕЖИВАНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ЦЕЛЕВОГО ОБЪЕКТА | 2014 |
|
RU2664257C2 |
| УСТРОЙСТВО ОЦЕНКИ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОЦЕНКИ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2687103C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ОРИЕНТИРОВАННОЙ ПЛЕНКИ И СПОСОБ ИЗГОТОВЛЕНИЯ ТЕЛА ОТОБРАЖЕНИЯ | 2015 |
|
RU2642152C1 |
| ИДЕНТИФИКАЦИЯ КЛЮЧЕВЫХ ТОЧЕК | 2014 |
|
RU2663356C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2000 |
|
RU2177897C1 |
| СПОСОБ ТРИАНГУЛЯЦИИ ЦЕЛЕЙ | 2010 |
|
RU2423720C1 |
| СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ ДВИЖУЩЕГОСЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2016 |
|
RU2645712C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2016 |
|
RU2730782C1 |
| Устройство захвата изображения и система захвата изображения | 2015 |
|
RU2650368C2 |


Изобретение относится к области геолокации. В заявленном способе и устройстве, реализующем заявленный способ, осуществляют удаленное определение абсолютного азимута целевой точки наземными средствами путем создания банка изображений, географически привязанного по абсолютному азимуту только из первой точки (P1), и использования этого банка изображений в качестве азимутальной привязки из второй точки, имеющей видимое окружение, по меньшей мере, частично совпадающее с видимым окружением первой точки. Технический результат - точное дистанционное определение абсолютного азимута целевой точки с использованием наземных средств. 5 н. и 10 з.п. ф-лы, 4 ил.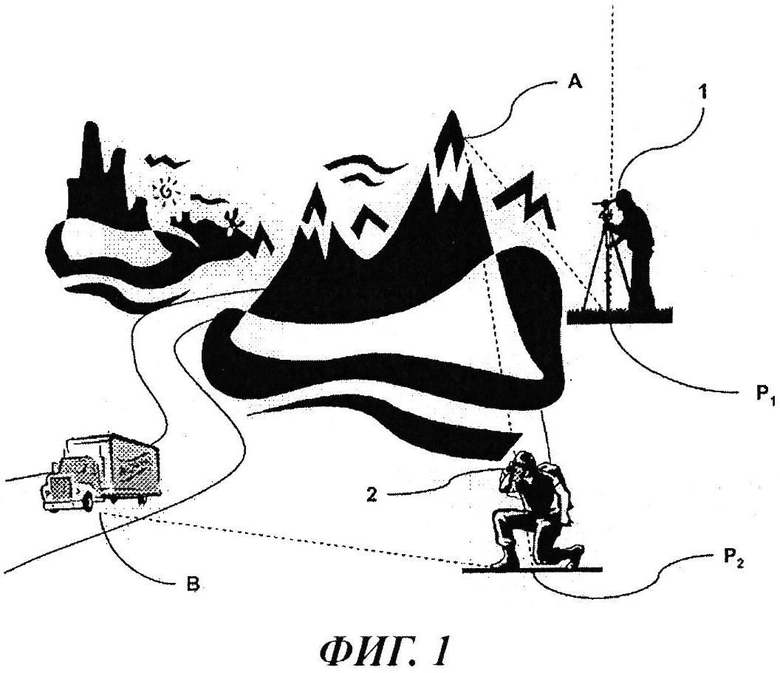
1. Способ дистанционного определения абсолютного азимута целевой точки (B), в котором:
получают (S1) первую серию изображений с помощью первой единицы (1) оборудования, содержащую, по меньшей мере, одно изображение первого видимого окружения из первой позиции (P1), координаты местоположения которой известны,
связывают (S2) элементы этих изображений со значениями абсолютного азимута в системе отсчета, центрированной по указанной первой позиции (Р1),
создают (S3) первую базу данных изображений, связанную с координатами местоположения первой позиции (Р1),
передают (S4) указанную первую базу данных изображений на вторую единицу (2) оборудования, указанная вторая единица (2) оборудования сохраняет указанную первую базу данных изображений,
получают (S5) вторую серию изображений с помощью второй единицы (2) оборудования, содержащую, по меньшей мере, одно изображение второго видимого окружения из второй позиции (P2), координаты местоположения которой известны и из которой видна целевая точка (B),
определяют (S6), по меньшей мере, одну точку соответствия между первой базой данных изображений и, по меньшей мере, одним изображением второй серии изображений, указанная, по меньшей мере, одна точка соответствия соответствует общему элементу (A), присутствующему в обоих первом и втором видимом окружении,
приписывают (S7) абсолютный азимут (θ2) общему элементу (A) в системе отсчета, центрированной по второй позиции (P2),
определяют (S8) относительный азимут (θ3) целевой точки (B) относительно указанного общего элемента (A) в системе отсчета, центрированной по второй позиции (P2),
определяют (S9) абсолютный азимут (θB) целевой точки (B) в системе отсчета, центрированной по второй позиции (P2), используя абсолютный азимут (θ2), приписанный общему элементу (A), в системе отсчета, центрированной по второй позиции (P2), и относительный азимут (θ3) целевой точки (B) относительно указанного элемента в системе отсчета, центрированной по второй позиции (P2).
2. Способ по п.1, отличающийся тем, что получают расстояние (dA) между общим элементом (A) и второй позицией (P2), чтобы приписать абсолютный азимут (θ2) общему элементу (A) в системе отсчета, центрированной по второй позиции (P2).
3. Способ по п. 2, отличающийся тем, что расстояния (dA,dB) определяют посредством телеметрии.
4. Способ по п.1, отличающийся тем, что точку соответствия между базой данных изображений и второй серией изображений определяют методом стерео видения с широкой базой.
5. Способ по п.1, отличающийся тем, что определение (S8) относительного азимута (θ3) целевой точки (B) относительно указанного общего элемента (A) в системе отсчета, центрированной по второй позиции (P2), осуществляют посредством анализа, по меньшей мере, одного изображения из второй серии изображений.
6. Способ по п. 1, отличающийся тем, что определение (S8) относительного азимута (θ3) целевой точки (B) относительно указанного общего элемента (A) в системе отсчета, центрированной по второй позиции (P2), осуществляют посредством акселерометра и/или скоростного гироскопа.
7. Способ по п. 1, отличающийся тем, что координаты местоположения первой (P1) и второй (P2) позиций определяют посредством спутниковой системы позиционирования.
8. Способ дистанционного определения координат местоположения целевой точки (B), в котором:
определяют согласно способу по п.1 или 2 абсолютный азимут (θB) целевой точки (B) в системе отcчета, центрированной по второй позиции (P2),
получают (S10) расстояние (dB) между второй позицией (P2) и целевой точкой (B),
определяют (S11) координаты местоположения целевой точки (B) с помощью абсолютного азимута (θB) целевой точки (B) в системе отсчета, центрированной по второй позиции (P2) известных координат второй позиции (P2) и расстояния (dB) между второй позицией и целевой точкой (B).
9. Система дистанционного определения абсолютного азимута целевой точки (B), содержащая
основную единицу (1) оборудования в качестве первой единицы (1) оборудования, включающую:
средства получения (S1) первой серии изображений, в которой по меньшей мере одно изображение первого видимого окружения получено из первой позиции (P1) координаты местоположения которой известны;
средства связывания (S2) элементов указанных изображений со значениями абсолютного азимута в системе отсчета, центрированной по первой позиции (P1);
средства создания (S3) первой базы данных изображений, связанной с координатами местоположения первой позиции (P1);
средства передачи (S4) указанной первой базы данных изображений в мобильную единицу (2) оборудования, которая содержит:
приемник, выполненный с возможностью хранения указанной первой базы данных изображений;
память, выполненная с возможностью хранения указанной первой базы данных изображений;
причем указанный приемник выполнен с возможностью приема второй серии изображений, в которой по меньшей мере одно изображение второго видимого окружения получено (S5) из второй позиции (P2), координаты местоположения которой известны и из которой видна целевая точка (B); и
компьютер, выполненный с возможностью:
определения (S6), по меньшей мере, одной точки соответствия между первой базой данных изображений и, по меньшей мере, одним изображением второй серии изображений и приписывания (S7) абсолютного азимута (θ2), по меньшей мере, одному элементу, по меньшей мере, одного изображения второй серии изображений в системе отсчета, центрированной по второй позиции (P2);
определения (S8) относительно азимута (θ3) целевой точки (B) относительно указанного элемента в системе отсчета, центрированной по второй позиции (P2);
определения (S9) абсолютного азимута (θB) целевой точки (B) в системе отсчета, центрированной по второй позиции (P2), путем использования абсолютного азимута (θ2), приписанного, по меньшей мере, одному элементу, по меньшей мере, одного изображения второй серии изображений и относительного азимута (θ3) цели относительно указанного элемента.
10. Система по п. 9, отличающаяся тем, что также содержит приемник спутниковой системы позиционирования.
11. Основная единица (1) оборудования для дистанционного определения абсолютного азимута целевой точки (B), содержащая:
средства получения (S1) первой серии изображений, в которой по меньшей мере одно изображение первого видимого окружения получено из первой позиции (P1), координаты местоположения которой известны;
средства связывания (S2) элементов указанных изображений со значениями абсолютного азимута в системе отсчета, центрированной по первой позиции (P1);
средства создания (S3) первой базы данных изображений, связанной с координатами местоположения первой позиции (P1);
средства аккумулирования энергии; и
средства передачи (S4) указанной первой базы данных изображений во вторую единицу (2) оборудования, которая выполнена с возможностью определения указанного абсолютного азимута указанной целевой точки (B) путем:
получения (S5) второй серии изображений, содержащей по меньшей мере одно изображение второго видимого окружения из второй позиции (P2), координаты местоположения которой известны и из которой видна целевая точка (B);
определения (S6), по меньшей мере, одной точки соответствия между первой базой данных изображений и, по меньшей мере, одним изображением второй серии изображений, причем указанная, по меньшей мере, одна точка соответствия соответствует общему элементу (А), присутствующему в обоих первом и втором видимом окружении;
приписывания (S7) абсолютного азимута (θ2) указанному общему элементу (A) в системе отсчета, центрированной по второй по второй позиции (P2);
определения (S8) относительного азимута (θ3) целевой точки (B) относительно общего элемента (A) в системе отсчета, центрированной по второй позиции (P2); и
определения (S9) абсолютного азимута (θB) целевой точки (B) в системе отсчета, центрированной по второй позиции (P2), путем использования абсолютного азимута (θ2) в системе отсчета, центрированной по второй позиции (P2), приписанного общему элементу (A),и относительного азимута (θ3) целевой точки (B) относительно указанного элемента в системе отсчета, центрированной по второй позиции (P2).
12. Основная единица (1) оборудования по п. 11, отличающаяся тем, что также содержит североискатель.
13. Мобильная единица (2) оборудования для дистанционного определения абсолютного азимута целевой точки (B), при котором получают первую серию изображений, в которой по меньшей мере одно изображение первого видимого окружения получено из первой позиции (P1), координаты местоположения которой известны, связывают (S2) элементы этих изображений со значениями абсолютного азимута в системе отсчета, центрированной по указанной первой позиции (P1), создают (S3) первую базу данных изображений, связанную с координатами местоположения первой позиции (P1), причем мобильная единица оборудования содержит:
приемник, выполненный с возможностью приема указанной первой базы данных изображений;
память, выполненная с возможностью хранения указанной первой базы данных изображений;
причем указанный приемник выполнен с возможностью приема второй серии изображений, в которой по меньшей мере одно изображение второго видимого окружения получено из второй позиции (P2), координаты местоположения которой известны и из которой видна целевая точка (B); и
средства обработки изображений и вычислительные средства для:
определения, по меньшей мере, одной точки соответствия между первой базой данных изображений и, по меньшей мере, одним изображением второй серии изображений и приписывания абсолютного азимута (θ2), по меньшей мере, одному элементу, по меньшей мере, одного изображения второй серии изображений в системе отсчета, центрированной по второй позиции (P2),
определения относительного азимута (θ3) целевой точки (B) относительно указанного элемента в системе отсчета, центрированной по второй позиции (P2),
определения абсолютного азимута (θB) целевой точки (B) в системе отсчета, центрированной по второй позиции (P2), путем использования абсолютного азимута (θ2), приписанного, по меньшей мере, одному элементу, по меньшей мере, одного изображения второй серии изображений и относительного азимута (θ3) цели относительно указанного элемента.
14. Мобильная единица (2) оборудования по п.13, отличающаяся тем, что содержит акселерометр и/или скоростной гироскоп.
15. Мобильная единица (2) оборудования по п.13, отличающаяся тем, что содержит графические и визуальные средства человеко-машинного интерфейса, обеспечивающие возможность оператору указанной второй единицы (2) оборудования вмешиваться в дистанционное определение абсолютного азимута целевой точки (B).
| WO 2007000067 A1, 04.01.2007 | |||
| US 20110043620 A1, 24.02.2011 | |||
| US 5512904 A1, 30.04.1996 | |||
| JP 62133375 A, 16.06.1987. |

