Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления парковкой и к оборудованию управления парковкой.
Уровень техники
[0002] Относительно этого вида технологии, известно оборудование управления парковкой, которое сконфигурировано таким образом, что в ходе операции парковки, человек, расположенный за пределами транспортного средства, может использовать терминальное устройство, чтобы проверять видеозапись, захваченную посредством бортовой камеры (патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2015/54530
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, в патентном документе 1, ничего не предусмотрено для случая, в котором окружение связи около транспортного средства является плохим, когда транспортное средство паркуется посредством управления извне транспортного средства.
[0005] Задача, которая должна решаться посредством настоящего изобретения, заключается в том, чтобы парковать транспортное средство посредством надлежащего управления транспортным средством извне транспортного средства, даже когда окружение связи около транспортного средства является плохим.
Средство решения задач
[0006] Настоящее изобретение решает вышеуказанную задачу посредством управления транспортным средством извне транспортного средства с тем, чтобы парковаться в соответствии с результатом оценки окружения связи около транспортного средства.
Преимущества изобретения
[0007] Согласно настоящему изобретению, транспортное средство может парковаться посредством надлежащего управления транспортным средством извне транспортного средства, даже когда окружение связи около транспортного средства является плохим.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей пример системы управления парковкой согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры управления в системе управления парковкой согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 3A является схемой для описания характеристик приема антенны в горизонтальной плоскости согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 3B является схемой для описания характеристик приема антенны в вертикальной плоскости согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4A является схемой для описания первого окружения согласно одному или более вариантов осуществления настоящего изобретения, в котором окружение связи варьируется.
Фиг. 4B является схемой для описания второго окружения согласно одному или более вариантов осуществления настоящего изобретения, в котором окружение связи варьируется.
Фиг. 4C является схемой для описания третьего окружения согласно одному или более вариантов осуществления настоящего изобретения, в котором окружение связи варьируется.
Фиг. 4D является схемой для описания четвертого окружения согласно одному или более вариантов осуществления окружения настоящего изобретения, в котором окружение связи варьируется.
Фиг. 5 является таблицей, иллюстрирующей пример параметров, используемых для вычисления пути для парковки.
Фиг. 6A является схемой, иллюстрирующей первый пример вычисления пути для парковки.
Фиг. 6B является схемой, иллюстрирующей второй пример вычисления пути для парковки.
Фиг. 6C является схемой, иллюстрирующей третий пример вычисления пути для парковки.
Фиг. 7 является схемой для описания примера обработки, в котором различный параметр применяется к области различного окружения связи.
Фиг. 8 является схемой для описания примера обработки вычисления пути для парковки для объезда области, в которой окружение связи является плохим.
Фиг. 9 является таблицей, иллюстрирующей пример параметров, используемых для вычисления управляющей информации для транспортного средства.
Фиг. 10 является схемой для описания условий моделирования согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 11A является набором графиков (a)-(e), иллюстрирующих профиль поведения транспортного средства, когда окружение связи является нормальным.
Фиг. 11B является набором графиков (a)-(e), иллюстрирующих профиль поведения транспортного средства, когда окружение связи является плохим.
Режим(ы) осуществления изобретения
[0009] Далее описываются один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, настоящее изобретение описывается посредством примерной иллюстрации примера, в котором оборудование управления парковкой согласно настоящему изобретению применяется к системе управления парковкой, оснащенной в транспортном средстве. Оборудование управления парковкой также может применяться к портативному терминальному устройству (такому оборудованию, как смартфон или персональное цифровое устройство (PDA)) допускающему обмен информацией с бортовыми устройствами. Способ управления парковкой согласно настоящему изобретению может использоваться в оборудовании управления парковкой, которое описывается ниже.
[0010] Фиг. 1 является блок-схемой системы 1000 управления парковкой, имеющей оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения. Система 1000 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения содержит камеры 1a-1d, устройство 2 обработки изображений, устройство 3 измерения дальности, вводное терминальное устройство 5, оборудование 100 управления парковкой, контроллер 70 транспортного средства, приводную систему 40, датчик 50 угла поворота при рулении и датчик 60 скорости транспортного средства. Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения управляет операцией перемещения (парковки) транспортного средства в место для парковки на основе рабочей команды, которая вводится из вводного терминального устройства 5.
[0011] Вводное терминальное устройство 5 представляет собой портативное терминальное устройство, которое может размещаться за пределами транспортного средства. Вводное терминальное устройство 5 принимает ввод рабочей команды для управления транспортным средством. Вводное терминальное устройство 5 включает в себя устройство связи и допускает обмен информацией с устройством 100 управления парковкой. Вводное терминальное устройство 5 передает рабочую команду, которая вводится снаружи транспортного средства, через сеть связи в оборудование 100 управления парковкой и вводит рабочую команду в оборудование 100 управления парковкой. Вводное терминальное устройство 5 обменивается данными с устройством 100 управления парковкой с использованием сигналов, включающих в себя уникальный идентификационный код. Вводное терминальное устройство 5 определяет частоту радиоволн связи, которые должны передаваться и приниматься, и установление и прерывание связи между устройством 100 управления парковкой и устройством 21 связи.
Вводное терминальное устройство 5 включает в себя дисплей 51. Дисплей 51 представляет интерфейс ввода и различные информационные элементы. Когда дисплей 51 представляет собой дисплей с сенсорной панелью, он имеет функцию приема рабочей команды.
Вводное терминальное устройство 5 может представлять собой портативное устройство, такое как смартфон или персональное цифровое устройство (PDA), в котором устанавливаются приложения для приема ввода рабочей команды, используемой в способе управления парковкой согласно одному или более вариантов осуществления настоящего изобретения, и передачи рабочей команды в оборудование 100 управления парковкой.
[0012] Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения содержит устройство 10 управления, устройство 20 ввода и устройство 30 вывода. Эти компоненты оборудования 100 управления парковкой соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией.
Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает рабочую команду, передаваемую из терминального устройства внешнего ввода 5, и вводит рабочую команду в устройство 20 ввода. Объект, который вводит рабочую команду во внешнее вводное терминальное устройство 5, может представлять собой человека (пользователя, пассажира, водителя или работника парковочной стоянки) либо также может представлять собой машину (устройство управления) на стороне парковочной стоянки. Устройство 20 ввода передает принимаемую рабочую команду в устройство 10 управления. Устройство 30 вывода включает в себя дисплей 31.
Устройство 30 вывода уведомляет водителя в отношении управляющей информации парковки. Дисплей 31 согласно одному или более вариантов осуществления настоящего изобретения представляет собой дисплей с сенсорной панелью, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, дисплей 31 служит в качестве устройства 20 ввода.
Даже когда транспортное средство управляется на основе рабочей команды, которая вводится из вводного терминального устройства 5, пассажир (водитель или пассажир) может вводить рабочую команду, такую как команда для экстренной остановки, через устройство 20 ввода.
[0013] Устройство 10 управления оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения представляет собой конкретный компьютер, содержащий ROM 12, которое сохраняет программу управления парковкой, CPU 11 в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 12, так что он служит в качестве оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения, и RAM 13, которое служит в качестве доступного устройства хранения данных.
[0014] Программа управления парковкой согласно одному или более вариантов осуществления настоящего изобретения представляет собой программу, которая выполняет процедуру управления для того, чтобы оценивать окружение связи около транспортного средства и управлять транспортным средством с тем, чтобы парковаться в соответствии с результатом оценки. Эта программа выполняется посредством устройства 10 управления оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения.
Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения представляет собой удаленное управляющее оборудование, которое принимает рабочую команду снаружи и управляет перемещением транспортного средства с тем, чтобы парковаться на данном месте для парковки. Во время этой операции, пассажир может присутствовать за пределами транспортного средства или также может присутствовать внутри транспортного средства.
Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения может иметь тип с автоматическим управлением, в котором операция руления и операция нажатия педали акселератора/тормоза выполняются автоматически. Оборудование 100 управления парковкой также может иметь полуавтоматический тип, в котором операция руления выполняется автоматически, и водитель выполняет операцию нажатия педали акселератора/тормоза.
В программе управления парковкой согласно одному или более вариантов осуществления настоящего изобретения, пользователь может произвольно выбирать целевое место для парковки или оборудование 100 управления парковкой, либо сторона парковочной стоянки может автоматически задавать целевое место для парковки.
[0015] Устройство 10 управления оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения имеет функции выполнения процесса получения рабочих команд, процесса оценки окружения связи и процесса управления парковкой. Каждый из вышеуказанных процессов выполняется посредством взаимодействия программного обеспечения для реализации процесса и вышеописанных аппаратных средств.
[0016] При осуществлении способа управления парковкой для управления транспортным средством на основе рабочей команды, полученной извне транспортного средства, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения оценивает окружение связи около транспортного средства и управляет транспортным средством с тем, чтобы парковаться с использованием способа управления в соответствии с результатом оценки. Устройство 10 управления оценивает окружение связи, формирует путь для парковки в соответствии с окружением связи, вычисляет содержимое управления в соответствии с окружением связи и управляет транспортным средством с тем, чтобы парковаться на данном месте для парковки на основе вышеуказанного.
Транспортное средство управляется с тем, чтобы парковаться в соответствии с результатом оценки окружения связи около транспортного средства, и в силу этого даже в местоположении, в котором удовлетворительная связь не может выполняться вследствие окружающей среды, отсутствия инфраструктуры связи, возмущений и т.д., транспортное средство может парковаться посредством способа, адаптированного к окружению связи.
[0017] Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления процесса управления парковкой, выполняемого посредством системы 1000 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения. Триггер для начала процесса управления парковкой не ограничен конкретным образом, и процесс управления парковкой может быть инициирован посредством операции пускового переключателя оборудования 100 управления парковкой.
[0018] Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения имеет функцию автоматического перемещения транспортного средства V на место для парковки на основе рабочей команды, полученной извне транспортного средства.
[0019] На этапе 101, устройство 10 управления оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения получает изображения, захваченные посредством камер 1a-1d, присоединяемых к нескольким сегментам транспортного средства V. Хотя не ограничено конкретным образом, камера 1a располагается на части решетки радиатора транспортного средства V, камера 1d располагается около заднего бампера, и камеры 1b и 1c располагаются на нижних частях правого и левого боковых зеркал. Камеры 1a-1d могут представлять собой камеру, имеющую широкоугольную линзу с широким углом обзора. Камеры 1a-1d захватывают изображения граничных линий мест для парковки около транспортного средства V и объектов, существующих около мест для парковки. Камеры 1a-1d могут представлять собой CCD-камеры, камеры для съемки в инфракрасном диапазоне или другие соответствующие устройства формирования изображений.
[0020] На этапе 101, устройство 10 управления также получает сигналы измерения дальности из устройства 3 измерения дальности, которое может представлять собой множество модулей, присоединенных к нескольким сегментам транспортного средства V.
Устройство 3 измерения дальности может предоставляться в позиции, идентичной позиции любой из камер 1a-1d, или также может предоставляться в другой позиции. Устройство 3 измерения дальности может представлять собой радарное устройство, такое как радар миллиметрового диапазона, лазерный радар и ультразвуковой радар или сонар. Устройство 3 измерения дальности обнаруживает присутствие или отсутствие объектов, позиции объектов, размеры объектов и расстояния до объектов на основе принимаемого сигнала радарного устройства. Такие объекты включают в себя установленные объекты, пешеходов, другие транспортные средства и припаркованные транспортные средства около транспортного средства. Принимаемый сигнал используется для того, чтобы выполнять определение в отношении того, представляет собой место для парковки или нет незанятое место (паркуется или нет транспортное средство на месте для парковки). Помехи могут обнаруживаться с использованием стереотехнологии движения посредством камер 1a-1d.
[0021] На этапе 102, устройство 10 управления оборудования 100 управления парковкой управляет устройством 2 обработки изображений таким образом, чтобы формировать изображение вида сверху. На основе полученного множества захваченных изображений, устройство 2 обработки изображений формирует изображение вида сверху, в котором состояние окрестностей, включающее в себя транспортное средство V и место для парковки для парковки транспортного средства V, просматривается из виртуальной точки обзора над транспортным средством V. После этапа 101 может выполняться этап 103 без создания изображения вида сверху.
[0022] На этапе 103, устройство 10 управления обнаруживает места для парковки, на которые парковка является возможной. Устройство 10 управления обнаруживает сигнальные линии дорожной разметки на основе захваченных изображений из камер 1a-1d. Сигнальные линии дорожной разметки представляют собой граничные линии, которые задают рамки (зоны) мест для парковки. Устройство 10 управления выполняет обнаружение краев для захваченных изображений и обнаруживает места для парковки на основе яркостной разности (контрастности). После обнаружения мест для парковки, устройство 10 управления обнаруживает незанятые места для парковки в соответствии со следующим условием доступности парковки с использованием обнаруживаемых данных устройства 3 измерения дальности/устройства 2 обработки изображений. Устройство 10 управления обнаруживает доступные места для парковки из числа мест для парковки. Доступные места для парковки представляют собой места для парковки, которые являются незанятыми (т.е. другие транспортные средства не паркуются), и пути для выполнения парковки в которые могут извлекаться. Такое условие, что путь может извлекаться, означает то, что траектория пути может подготавливаться посредством рендеринга в координатах поверхности дороги без препятствий в виде помех (включающих в себя припаркованные транспортные средства). На практике, точный путь для парковки для управления транспортным средством извлекается после того, как целевое место для парковки задается.
[0023] На этапе 104, устройство 10 управления передает доступные места для парковки во вводное терминальное устройство 5, которое управляется с возможностью отображать доступные места для парковки на дисплее 51. Доступные места для парковки могут накладываться на изображение вида сверху на основе захваченных изображений и отображаться на нем.
[0024] После этого, связь с вводным терминальным устройством 5 устанавливается, и процесс получения рабочих команд выполняется. Целевое место для парковки представляет собой место для парковки, на котором транспортное средство паркуется посредством автоматизированного вождения, и представляет целевую позицию при автоматизированном вождении. Целевое место для парковки вводится через вводное терминальное устройство 5. Например, когда дисплей 51 представлять собой дисплей с сенсорной панелью, пользователь может касаться участка требуемого места для парковки, чтобы за счет этого выбирать одно целевое место для парковки. Идентификационная информация выбранного целевого места для парковки передается в оборудование 100 управления парковкой и вводится в устройство 10 управления.
Когда, на этапе 105, рабочая команда, которая указывает одно место для парковки, вводится во вводное терминальное устройство 5, место для парковки задается в качестве целевого места для парковки. До тех пор, пока целевое место Mo для парковки не будет введено, последовательность операций управления возвращается к этапу 104 и ожидает ввода рабочей команды. Рабочая команда включает в себя любое из активации оборудования 100 управления парковкой, выбора целевого места для парковки и команды выполнения для управления парковкой.
[0025] На этапе 106, процесс оценки окружения связи выполняется. Устройство 10 управления оценивает окружение связи около транспортного средства. Термин "около транспортного средства" означает область, которая включает в себя, по меньшей мере, позицию транспортного средства и позицию места для парковки, на котором может парковаться транспортное средство. Вся автомобильная парковка, которая имеет намерение использоваться для транспортного средства, может представлять собой "около транспортного средства", или область, в которой расстояние от транспортного средства меньше предварительно определенного расстояния, может представлять собой "около транспортного средства".
[0026] Фиг. 3A и фиг. 3B являются схемами для описания характеристик приема антенны AN устройства 21 связи, оснащенного в транспортном средстве V1. Антенна AN этого примера представляет собой ненаправленную гибкую штыревую антенну, допускающую прием радиоволн из всех направлений. Фиг. 3A иллюстрирует характеристики SH1 и SH2 приема в горизонтальной плоскости, и фиг. 3B иллюстрирует характеристики SH1 и SH2 приема в вертикальной плоскости. Антенна AN размещается вдоль вертикального направления. Характеристики SH1 приема, проиллюстрированные на фиг. 3A и фиг. 3B, являются идеальными характеристиками приема только антенны AN. Характеристики SH2 приема, проиллюстрированные на фиг. 3A и фиг. 3B, являются характеристиками приема, затрагиваемыми посредством ориентации вводного терминального устройства 5 вследствие помех с кузовом транспортного средства. Характеристики приема антенны AN варьируются в зависимости от ориентации вводного терминального устройства 5, т.е. ориентации вводного терминального устройства 5 относительно транспортного средства V1 (бортовой антенны AN). Другими словами, характеристики приема антенны AN транспортного средства V1 затрагиваются посредством кузова транспортного средства и в силу этого также варьируются в зависимости от позиционной взаимосвязи между транспортным средством V1 и вводным терминальным устройством 5. Кроме того, характеристики приема антенны AN затрагиваются посредством объектов (других транспортных средств, конструкций, установленных объектов и т.д.), отличных от транспортного средства V1.
[0027] Со ссылкой на фиг. 4A-4D, описываются некоторые окружения, в которых характеристики приема антенны AN варьируются, и окружение связи варьируется в зависимости от позиции и ориентации вводного терминального устройства 5, позиции транспортного средства V1 и присутствия и позиций объектов. Фиг. 4A-4D иллюстрируют окружения, в которых оператор HM, расположенный около входа/выхода, удаленно управляет транспортным средством V1A извне салона транспортного средства с возможностью парковать транспортное средство V1A на целевом месте Mo для парковки.
[0028] В окружении, проиллюстрированном на фиг. 4A, оператор HM управляет транспортным средством V1A с возможностью перемещаться из начальной позиции по пути RT, указанному посредством стрелки, и парковать транспортное средство V1A на целевом месте Mo для парковки. В этом окружении, объекты, затрагивающие характеристики приема, не присутствуют между транспортным средством V1 (антенной AN), перемещающимся вдоль пути из начальной позиции в целевое место Mo для парковки, и вводным терминальным устройством 5, управляемым оператором HM.
В окружении, проиллюстрированном на фиг. 4B, оператор HM управляет транспортным средством V1A с возможностью перемещаться из начальной позиции по пути RT, указанному посредством стрелки, и парковать транспортное средство V1A на целевом месте Mo для парковки. Также может быть возможным альтернативное окружение, в котором транспортное средство V1A', припаркованное на фиг. 4A, управляется с возможностью перемещаться из начальной позиции по пути, указанному посредством стрелки, и парковаться на целевом месте Mo для парковки. В таких окружениях, другие транспортные средства V2 и V3 присутствуют рядом с целевым местом Mo для парковки. Другие транспортные средства V2 и V3 представляют собой объекты, которые, затрагивают характеристики приема транспортного средства V1 (антенны AN).
В окружении, проиллюстрированном на фиг. 4C, оператор HM управляет транспортным средством V1A с возможностью перемещаться из начальной позиции по пути RT, указанному посредством стрелки, и парковать транспортное средство V1A на целевом месте Mo для парковки. Также может быть возможным альтернативное окружение, в котором транспортное средство V1A', припаркованное на фиг. 4B, управляется с возможностью перемещаться из начальной позиции по пути, указанному посредством стрелки, и парковаться на целевом месте Mo для парковки. В таких окружениях, другое транспортное средство V4 присутствует между целевым местом Mo для парковки и вводным терминальным устройством 5, управляемым оператором HM. Транспортное средство V1 (антенна AN) скрывается в тени другого транспортного средства 4 при просмотре из вводного терминального устройства 5.
В окружении, проиллюстрированном на фиг. 4D, оператор HM управляет транспортным средством VA1, припаркованном в окружении по фиг. 4C, с возможностью перемещаться из целевого места Mo для парковки в позицию места назначения по пути RT, указанному посредством стрелки. Это основано на операции управления транспортным средством VA1 с возможностью выезжать из места для парковки и перемещаться в место близко к оператору. Способ управления парковкой согласно одному или более вариантов осуществления настоящего изобретения включает в себя не только способ управления транспортным средством V1 с возможностью въезжать на место для парковки, но также и способ управления транспортным средством V1 с возможностью выезжать из места для парковки и перемещаться в данное место. В таких окружениях, другое транспортное средство V4 присутствует между целевым местом Mo для парковки в качестве начальной позиции и вводным терминальным устройством 5, управляемым оператором HM. В начале операции, транспортное средство V1 (антенна AN) скрывается в тени другого транспортного средства 4 при просмотре из вводного терминального устройства 5.
Таким образом, позиция и ориентация вводного терминального устройства 5, начальная позиция транспортного средства V1, позиция целевого места для парковки и позиция и размер объекта затрагивают характеристики приема антенны и варьируют окружение связи около транспортного средства.
[0029] В одном или более вариантов осуществления настоящего изобретения, следующие схемы предлагаются в качестве схем для оценки окружения связи около транспортного средства V1.
(1) При оценке окружения связи около транспортного средства V1, устройство 10 управления оценивает уровень окружения связи в соответствии с позиционной взаимосвязью между транспортным средством V1 и вводным терминальным устройством 5, которое передает рабочую команду.
Устройство 10 управления оценивает то, что состояние связи является более плохим по мере того, как расстояние между вводным терминальным устройством 5 и транспортным средством V1 (антенной AN) является большим. Потери при распространении в свободном пространстве на расстоянии d (м) от изотропной антенны зависят от расстояния d. По мере того, как расстояние между вводным терминальным устройством 5 и транспортным средством V1 (антенной AN) увеличивается, состояние связи ухудшается вследствие потерь при распространении в свободном пространстве. Соответственно, уровень окружения связи оценивается как более низкий по мере того, как расстояние между ними является большим.
Характеристики приема (чувствительность/интенсивность радиополя) антенны AN отличаются в зависимости от угла направления связи по радиоволнам вводного терминального устройства 5 относительно направления движения транспортного средства V1. Тенденция характеристик приема (чувствительность/интенсивность радиополя) антенны AN в зависимости от угла ориентации вводного терминального устройства 5 (направления связи по радиоволнам) относительно направления движения транспортного средства V1 является постоянной. Устройство 10 управления обращается к взаимосвязи между углом вводного терминального устройства 5 относительно ориентации транспортного средства V1 (направление движения) и характеристиками связи, которые предварительно собраны, и оценивает характеристики связи из угла вводного терминального устройства 5 относительно ориентации транспортного средства V1 (направления движения). Устройство 10 управления оценивает уровень окружения связи на основе оцененных характеристик связи.
Это варьирование характеристик связи обусловлено влиянием помех с кузовом транспортного средства для транспортного средства V1, как описано выше со ссылкой на фиг. 3A и 3B. Имеется очень высокая вероятность того, что антенна вводного терминального устройства 5 является ненаправленной, и очевидно, что влияние ориентации вводного терминального устройства является низким. Устройство 10 управления задает угол, сформированный посредством направления движения транспортного средства V1 и сегмента линии, соединяющего транспортное средство V1 и вводное терминальное устройство 5, в качестве "ориентации транспортного средства V1". "Ориентация (угол) транспортного средства V1" и характеристики приема (чувствительность/интенсивность радиополя) бортовой антенны AN предварительно ассоциированы друг с другом. Устройство 10 управления обращается к взаимосвязи между "ориентацией транспортного средства V1" и характеристиками связи, которые предварительно собраны, и оценивает характеристики связи на основе фактической ориентации транспортного средства V1. Фактическая ориентация транспортного средства V1 получается на основе позиции транспортного средства V1, величины руления, полученной из датчика 50 угла поворота при рулении, и выходного сигнала гиродатчика.
При оценке окружения связи около транспортного средства V1, уровень окружения связи оценивается в соответствии с позиционной взаимосвязью (например, расстоянием и направлением) между транспортным средством V1 и вводным терминальным устройством 5, которое передает рабочую команду, и за счет этого можно надлежащим образом оценивать окружение связи, когда процесс удаленной парковки выполняется с использованием вводного терминального устройства 5.
[0030] (2) При оценке окружения связи около транспортного средства V1, устройство 10 управления обнаруживает объекты около транспортного средства V1 и оценивает уровень окружения связи на основе результатов обнаружения объектов. Устройство 10 управления может распознавать позиции объектов, число объектов, размеры объектов и т.д. на основе изображений, захваченных посредством камер 1a-1d, и/или сигналов обнаружения из устройства 3 измерения дальности.
Степень ухудшения уровня окружения связи вследствие присутствия объекта может получаться посредством моделирования относительно величины потерь для потерь при распространении в свободном пространстве (доли электрической мощности, передаваемой через свободное пространство) вследствие присутствия объекта на основе позиционной взаимосвязи между транспортным средством V1 и вводным терминальным устройством 5.
Помехи при многолучевом распространении, сформированные посредством объекта около вводного терминального устройства 5 и объекта около транспортного средства V1 (антенны AN), затрагивают связь между вводным терминальным устройством 5 и антенной AN и ухудшают уровень окружения связи.
Влияние помех при многолучевом распространении оценивается как большее по мере того, как размер объекта около вводного терминального устройства 5 и размер объекта около транспортного средства V1 (антенны AN) больше, и в силу этого уровень окружения связи оценивается как низкий.
Влияние помех при многолучевом распространении также оценивается как большее по мере того, как число объектов около вводного терминального устройства 5 и число объектов около транспортного средства V1 (антенны AN) больше, и в силу этого уровень окружения связи оценивается как низкий.
При оценке окружения связи около транспортного средства V1, объекты около транспортного средства V1 обнаруживаются, уровень окружения связи оценивается в соответствии с результатами обнаружения объектов, и за счет этого можно надлежащим образом оценивать окружение связи, когда процесс удаленной парковки выполняется с использованием вводного терминального устройства 5.
В частности, устройство 10 управления оценивает то, что уровень окружения связи является более низким по мере того, как расстояние между объектом и вводным терминальным устройством 5, которое передает рабочую команду, укорачивается. Помимо этого или альтернативно, устройство 10 управления оценивает то, что уровень окружения связи является более низким по мере того, как расстояние между транспортным средством V1 и объектом укорачивается.
При оценке окружения связи около транспортного средства V1, уровень окружения связи оценивается как более низкий по мере того, как расстояние между вводным терминальным устройством 5 и объектом укорачивается, или по мере того, как расстояние между транспортным средством 1 и объектом укорачивается, и за счет этого можно надлежащим образом оценивать окружение связи, когда процесс удаленной парковки выполняется, с учетом возмущений помех при многолучевом распространении посредством объекта.
[0031] (3) При оценке окружения связи около транспортного средства V1, устройство 10 управления обращается к информации 131 окружения связи, которая предварительно ассоциирована с информацией позиции, и оценивает окружение связи около транспортного средства V1 на основе информации окружения связи около транспортного средства V1. Информация 131 окружения связи может считываться из внешней базы данных либо также может считываться из базы данных, сохраненной в RAM 13.
Информация 131 окружения связи является информацией, в которой уровень окружения связи ассоциирован с картографической информацией. Согласно информации 131 окружения связи, можно получать уровень окружения связи для каждой точки. Уровень окружения связи оценивается на основе числа точек доступа Wi-Fi в предварительно определенной области, включающей в себя определенную точку, и/или плотности населения в предварительно определенной области, включающей в себя определенную точку. Чем выше число/плотность Wi-Fi-точек доступа, тем выше оценивается уровень окружения связи. Чем выше плотность населения, тем ниже оценивается уровень окружения связи. Посредством определения уровня окружения связи на основе как числа Wi-Fi-точек доступа, так и плотности населения, даже когда число Wi-Fi-точек доступа превышает предварительно определенное число около делового района города и т.п., уровень окружения связи может оцениваться как низкий в густонаселенном районе с определенной плотностью населения или больше. Когда число Wi-Fi-точек доступа меньше предварительно определенного значения в менее густонаселенном районе и т.п., уровень окружения связи может оцениваться как низкий, даже когда плотность населения меньше предварительно определенного значения.
В информации 131 окружения связи, картографическая информация может быть ассоциирована с региональными атрибутами (горы, леса, парковки), числом высотных зданий, высотой высотных зданий или уровнем окружения связи, определенным на их основе.
В информации 131 окружения связи, картографическая информация может быть ассоциирована с числом принимаемых сигналов из глобальной системы позиционирования (GPS) (числом спутников, допускающих прием сигналов), состоянием приема телевизионных приемников (отношением "мощность-несущей-к-шуму": C/N-отношением), состоянием приема радиоприемных устройств (отношением "сигнал-шум": отношением "сигнал-шум") или уровнем окружения связи, определенным на их основе.
В информации 131 окружения связи, картографическая информация может быть ассоциирована с предысторией оценки окружения связи, наблюдаемого в каждой точке. Предыстория оценки окружения связи может представлять собой любую из предысторий окружений связи, которые наблюдаются в предыдущие разы, таких как региональные атрибуты (горы, леса, парковки), число высотных зданий, высота высотных зданий, число принимаемых сигналов, принимаемых посредством приемных GPS-устройств (число спутников, допускающих прием сигналов), состояние приема телевизионных приемников и состояние приема радиоприемных устройств.
Предыстория оценки окружения связи может представлять собой предысторию прерывания связи, наблюдаемого в предыдущие разы. Предыстория прерывания связи записывается в картографической информации таким образом, что тот факт, что прерывание связи возникает при использовании оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения, и точка, в которой возникает прерывание связи, ассоциированы друг с другом. Это обеспечивает возможность оценки уровня окружения связи на основе предыстории фактического окружения связи.
Посредством обращения к информации 131 окружения связи, которая предварительно ассоциирована с позиционной информацией, и оценки окружения связи около транспортного средства V1 на основе информации окружения связи около транспортного средства V1, окружение связи может оцениваться с учетом состояния (атрибута) каждой точки и того факта, что прерывание связи возникает в предыдущие разы.
[0032] (4) При оценке окружения связи около транспортного средства V1, устройство 10 управления оценивает уровень окружения связи в соответствии с ситуацией незанятости полосы частот (полосы частот) радиоволн связи, используемых около транспортного средства V1. Незанятость полосы частот радиоволн связи означает ситуацию, в которой радиоволны связи полосы частот не передаются и принимаются (не используются). Схема определения ситуации незанятости полосы частот радиоволн связи не ограничена конкретным образом, и ситуация незанятости может определяться на основе числа неиспользуемых полос частот радиоволн связи. Устройство 10 управления иллюстрирует интенсивность (Y) радиополя принимаемых радиоволн для каждой частоты/полосы (X) частот. Плотность по номеру графика для каждой частоты/полосы (X) частот вычисляется, и частота/полоса частот, плотность которой равна нулю или меньше предварительно определенного значения, определяется в качестве неиспользуемой полосы частот связи (полоса частот связи представляет собой полосу частот, используемую для связи). Когда число неиспользуемых полос частот связи составляет предварительно определенное значение TH1 или больше, выполняется определение в отношении того, что ситуация незанятости полосы частот радиоволн связи является высокой, и уровень окружения связи является высоким. С другой стороны, когда число неиспользуемых полос частот связи меньше предварительно определенного значения TH2, выполняется определение в отношении того, что ситуация незанятости полосы частот радиоволн связи является низкой, и уровень окружения связи является низким.
При оценке окружения связи около транспортного средства V1, уровень окружения связи оценивается в соответствии с ситуацией незанятости полосы частот радиоволн связи, используемых около транспортного средства V1, и в силу этого окружение связи может точно оцениваться на основе фактической ситуации связи.
[0033] (5) При оценке окружения связи около транспортного средства V1, устройство 10 управления оценивает уровень окружения связи на основе состояния прерывания связи около транспортного средства V1. Способ определения состояния прерывания радиоволн связи не ограничен конкретным образом, но когда время прерывания связи составляет определенное пороговое значение определения или больше, радиоволны связи определяются как находящиеся в состоянии прерывания. Помимо этого или альтернативно, когда частота появления (число возникновений/единицы времени) состояний прерывания приема радиоволн составляет определенное пороговое значение определения или больше, связь определяется как находящаяся в состоянии прерывания.
Посредством оценки уровня окружения связи на основе состояния прерывания радиоволн связи около транспортного средства V1, можно оценивать окружение связи на основе фактической ситуации.
Устройство 10 управления может определять то, что уровень окружения связи является более низким по мере того, как время прерывания связи является большим. Значения параметров, которые описываются ниже, могут задаваться в соответствии с продолжительностью времени прерывания связи. Например, по мере того, как время прерывания связи увеличивается, устройство 10 управления может сокращать длину пути для парковки, сокращать расстояние до позиции поворота для парковки (включающей в себя позицию, в которой транспортное средство выполняет остановку после перемещения вперед и затем начинает перемещение назад, здесь и в дальнейшем), увеличивать ширину зазора от объекта и/или уменьшать максимальную кривизну/темп изменения максимальной кривизны.
В этом процессе, когда уровень окружения связи оценивается как низкий, пороговое значение оценки для оценки состояния прерывания может задаваться равным различному значению. Устройство 10 управления изменяет пороговое значение определения для прерывания связи в соответствии с уровнем окружения связи. Для области, в которой уровень окружения связи оценивается как меньше (ниже) предварительно определенного значения с использованием любой из вышеописанных других схем оценки, пороговое значение определения для прерывания связи изменяется на высокое значение. Например, пороговое значение определения, когда уровень окружения связи является относительно лучшим значением L1 (L1>L2>L3), составляет TH1, пороговое значение определения, когда уровень окружения связи является относительно более плохим значением L2, составляет TH2, и пороговое значение определения, когда уровень окружения связи является плохим значением L3, составляет TH3. Взаимосвязь пороговых значений определения представляет собой TH1<TH2<TH3. Посредством регулирования порогового значения определения таким образом, что возникновение прерывания связи с большей вероятностью определяется по мере того, как уровень окружения связи является более низким (является более плохим), прерывание связи может определяться с высокой степенью чувствительности.
Когда уровень окружения связи оценивается как низкий посредством задания порогового значения оценки для оценки состояния прерывания таким образом, что возникновение прерывания связи с большей вероятностью определяется, возникновение прерывания связи может определяться с высокой степенью точности.
[0034] Когда уровень окружения связи оценивается как низкий, устройство 10 управления изменяет частоту, на которой передается и принимается рабочая команда. Посредством изменения частоты, может улучшаться окружение связи.
Когда путь для парковки превышает предварительно определенное значение, и уровень окружения связи оценивается как низкий, устройство 10 управления изменяет используемую частоту на другую частоту.
Когда число обнаруженных объектов превышает предварительно определенное значение, и уровень окружения связи оценивается как низкий, устройство 10 управления изменяет используемую частоту на другую частоту.
[0035] После оценки уровня окружения связи на этапе 106, процедура переходит к этапу 107. На этапе 107, параметры, соответствующие уровню окружения связи, считываются. Эти параметры используются при вычислении пути для парковки на следующем этапе 108. После этапа 106 может выполняться этап 108, на котором путь для парковки вычисляется с использованием нормальных параметров.
[0036] На этапе 107, устройство 10 управления получает параметры для вычисления пути для парковки для перемещения транспортного средства V1 в целевое место Mo для парковки. Параметры задаются для каждого уровня окружения связи. Устройство 10 управления считывает параметры, соответствующие уровню окружения связи, оцененному на этапе 106. Фиг. 5 иллюстрирует пример параметров, используемых для вычисления пути для парковки.
Эти параметры включают в себя любое одно или более из длины пути для парковки, расстояния до позиции поворота для парковки, ширины (длины) зазора от объекта, максимальной кривизны пути для парковки и темпа изменения максимальной кривизны пути для парковки.
Каждый параметр задается для каждого уровня окружения связи. Первый параметр задается для уровня 1 окружения связи (нормальный), второй параметр задается для уровня 2 окружения связи (относительно более плохой, чем уровень 1 окружения связи), и третий параметр задается для уровня 3 окружения связи (относительно более плохой, чем уровень 2 окружения связи, т.е. очень плохой). В этом примере, уровни окружения связи и параметры классифицируются на три стадии, но число стадий не ограничено.
Посредством вычисления пути для парковки с использованием параметра, соответствующего уровню окружения связи, даже когда окружение связи является плохим, транспортное средство может парковаться по пути, адаптированному к окружению связи.
[0037] В одном или более вариантов осуществления настоящего изобретения, следующие схемы предлагаются в качестве схем для вычисления пути для парковки в соответствии с окружением связи.
(1) Когда уровень окружения связи оценивается как низкий, устройство 10 управления вычисляет путь для парковки, имеющий меньшую длину пути, чем тогда, когда уровень окружения связи не оценивается как низкий. Как проиллюстрировано на фиг. 5, для длины пути для парковки, первый параметр LR1, второй параметр LR2 и третий параметр LR3 задаются (LR1>LR2>LR3). Как проиллюстрировано на чертеже, меньшая длина пути ассоциирована по мере того, как уровень окружения связи является более низким.
В дальнейшем это описывается со ссылкой на фиг. 6A. Как проиллюстрировано на чертеже, поясняется случай, в котором транспортное средство V1 перемещается вперед из позиции P1 в позицию P2 или позицию P3, выполняет остановку и затем перемещается назад, чтобы парковаться в позиции P4. Когда окружение связи является хорошим, первый параметр используется для того, чтобы формировать путь для парковки, который придерживается позиции P1, позиции P3 и позиции P4. С другой стороны, когда окружение связи является плохим, второй или третий параметр используется для того, чтобы формировать путь для парковки, который придерживается позиции P1, позиции P2 и придерживается позиции P1, позиции P2 и позиции P4.
Таким образом, посредством формирования пути для парковки, имеющего меньшую длину пути по мере того, как уровень окружения связи является более низким, можно снижать риск возникновения прерывания связи при перемещении по пути для парковки.
[0038] Дополнительно, как проиллюстрировано на фиг. 5, параметры включают в себя максимальную кривизну пути для парковки и темп изменения максимальной кривизны пути для парковки. Когда уровень окружения связи оценивается как низкий, максимальная кривизна и темп изменения максимальной кривизны с меньшими значениями, чем тогда, когда уровень окружения связи не оценивается как низкий, задаются. Как проиллюстрировано на фиг. 5, для максимальной кривизны, первый параметр MR1, второй параметр MR2 и третий параметр MR3 задаются (MR1>MR2>MR3). Для темпа изменения максимальной кривизны, первый параметр CR1, второй параметр CR2 и третий параметр CR3 задаются (CR1>CR2>CR3). Хотя дублированное описание опускается, параметры, связанные с максимальной кривизной и темпом изменения максимальной кривизны, могут использоваться для вычисления пути для парковки вместе с вышеописанной длиной пути, расстояниями 1 и 2 до позиции поворота для парковки, которые описываются ниже, и шириной зазора от объекта.
[0039] (2) Когда уровень окружения связи оценивается как низкий, устройство 10 управления вычисляет путь для парковки, имеющий меньшее расстояние от позиции P0 вводного терминального устройства 5, используемого оператором HM, до позиции P2, P3 поворота для парковки, чем тогда, когда уровень окружения связи не оценивается как низкий. Как проиллюстрировано на фиг. 5, для расстояния 1 от вводного терминального устройства 5 до позиции поворота для парковки, первый параметр CCR1, второй параметр CCR2 и третий параметр CCR3 задаются (CCR1>CCR2>CCR3). Как проиллюстрировано на чертеже, чем ниже уровень окружения связи, тем меньшим задается расстояние 1 от вводного терминального устройства 5 до позиции поворота для парковки.
В дальнейшем это описывается со ссылкой на фиг. 6B. Как проиллюстрировано на чертеже, поясняется случай, в котором транспортное средство V1 трогается с места из позиции P1, после того, как поворачивает в позиции P2 или позиции P3 для парковки (что включает в себя процесс выполнения остановки после перемещения вперед и затем перемещения назад, здесь и в дальнейшем), и паркуется в позиции P4. Когда окружение связи является хорошим, используется первый параметр. Это обеспечивает возможность формирования пути для парковки, который придерживается позиции P1, позиции P3 и позиции P4, и при котором расстояние от вводного терминального устройства 5 до позиции поворота для парковки составляет D1. С другой стороны, когда окружение связи является плохим, используется второй или третий параметр. Это обеспечивает возможность формирования пути для парковки, который придерживается позиции P1, позиции P2 и позиции P4, и при котором расстояние от вводного терминального устройства 5 до позиции поворота для парковки составляет D2 (D2<D1). Чем ниже уровень окружения связи, тем меньшим задается расстояние от вводного терминального устройства 5 до позиции поворота для парковки. Как результат, чем ниже уровень окружения связи, тем меньшей может вычисляться длина пути пути для парковки.
Таким образом, посредством формирования пути для парковки, имеющего меньшее расстояние от вводного терминального устройства 5 до позиции поворота для парковки по мере того, как уровень окружения связи является более низким, операция поворота для парковки может выполняться в точке ближе к вводному терминальному устройству 5/пользователю. Это приводит к сокращенному пути для парковки, и в силу этого можно снижать риск возникновения прерывания связи при перемещении по пути для парковки.
[0040] (3) Когда уровень окружения связи оценивается как низкий, устройство 10 управления вычисляет путь для парковки, в котором позиция поворота для парковки сдвигается в вышележащую сторону (сторону транспортного средства), чем тогда, когда уровень окружения связи не оценивается как низкий. Как проиллюстрировано на фиг. 5, для расстояния 2 от начальной точки пути для парковки до позиции поворота для парковки, первый параметр PCR1, второй параметр PCR2 и третий параметр PCR3 задаются (PCR1>PCR2>PCR3). Как проиллюстрировано на чертеже, чем ниже уровень окружения связи, тем меньшим задается расстояние 2 до позиции поворота для парковки (расстояние от начальной точки пути для парковки).
Хотя не проиллюстрировано, когда окружение связи является хорошим, первый параметр используется для того, чтобы задавать PCR1 в качестве расстояния от начальной точки пути для парковки до позиции поворота для парковки, в то время как, когда окружение связи является плохим, второй или третий параметр используется для того, чтобы задавать PCR2 или PCR2 в качестве расстояния от начальной точки пути для парковки до позиции поворота для парковки.
Таким образом, посредством формирования пути для парковки, имеющего меньшее расстояние от начальной точки пути для парковки до позиции поворота для парковки по мере того, как уровень окружения связи является более низким, операция поворота для парковки может выполняться в точке ближе ко вводному терминальному устройству 5/пользователю. Это приводит к сокращенному пути для парковки, и в силу этого можно снижать риск возникновения прерывания связи при перемещении по пути для парковки.
[0041] (4) Когда уровень окружения связи оценивается как низкий, устройство 10 управления вычисляет путь для парковки в состоянии, в котором ширина зазора от объекта является расширенной, чем тогда, когда уровень окружения связи не оценивается как низкий. Как проиллюстрировано на фиг. 5, для ширины зазора от объекта, первый параметр CLR1, второй параметр CLR2 и третий параметр CLR3 задаются (CLR1>CLR2>CLR3). Как проиллюстрировано на чертеже, чем ниже уровень окружения связи, тем большей задается ширина зазора от объекта.
В дальнейшем это описывается со ссылкой на фиг. 6C. Как проиллюстрировано на чертеже, поясняется случай, в котором транспортное средство V1 трогается с места из позиции P1, после того, как поворачивает в позиции P2 или позиции P3 для парковки, и паркуется в позиции P4. Стена W в качестве объекта присутствует на левой передней стороне позиции P2, P3, в которой выполняется поворот для парковки.
Когда окружение связи является хорошим, первый параметр используется для того, чтобы формировать путь для парковки, который придерживается позиции P1, позиции P3 и позиции P4, и при котором ширина (длина) просвета от стенки составляет C1. С другой стороны, когда окружение связи является плохим, второй или третий параметр используется для того, чтобы формировать путь для парковки, который придерживается позиции P1, позиции P2 и позиции P4, и при котором ширина просвета от стены W составляет C2 (C2>C1). Чем ниже уровень окружения связи, тем большей задается ширина просвета от стены W в качестве объекта.
Таким образом, путь для парковки формируется таким образом, что ширина зазора от объекта больше по мере того, как уровень окружения связи является более низким. Это обеспечивает возможность выполнения операции поворота для парковки в позиции на большом расстоянии от объекта (например, стены W). Когда уровень окружения связи является низким, посредством рассмотрения достаточного расстояния между транспортным средством V1 и стеной W, можно обеспечивать область перемещения для транспортного средства V1 и гарантировать степень свободы в перемещении транспортного средства V1.
[0042] Вышеописанный уровень окружения связи может определяться для всей области около транспортного средства V1, или область около транспортного средства V1 может разделяться на множество областей, и определение может выполняться для каждой области. Дополнительно, вышеописанные параметры могут применяться ко всей области около транспортного средства V1, или область около транспортного средства V1 может разделяться на множество областей, и параметры могут применяться к каждой области.
[0043] Устройство 10 управления может задавать множество областей в соответствии с уровнем окружения связи. Устройство 10 управления распознает места, имеющие различные уровни окружения связи, в качестве различных областей. Устройство 10 управления получает параметр, соответствующий окружению связи каждой области, вычисляет путь для парковки в каждой области с использованием параметра и вычисляет весь путь для парковки из пути для парковки в каждой области.
Как проиллюстрировано на фиг. 7, устройство 10 управления оценивает окружение связи пространства около транспортного средства V1 для каждой области. Места около транспортного средства V1 задаются посредством стены W и имеют объект OB, который представляет собой конструкцию. Транспортное средство V1 паркуется на целевом месте Mo для парковки. При вычислении пути RT для парковки для транспортного средства V1, устройство 10 управления применяет различные параметры для областей A0, A1 и A2. Окружение связи области A0 находится на уровне 1 (нормальный). Параметр пути из PO1 в PO2 на пути RT для парковки представляет собой первый параметр. Окружение связи области A1 находится на уровне 2 (плохо). Параметр пути из PO3 в позицию PO4 поворота для парковки и пути из PO4 в PO5 на пути RT для парковки представляет собой второй параметр. Окружение связи области A2 находится на уровне 3 (очень плохой). Параметр пути из PO5 в PO6 в качестве позиции остановки на пути RT для парковки представляет собой третий параметр.
Такие объекты, как конструкции и другие транспортные средства, присутствуют около транспортного средства V1, так что окружение связи не является однородным. Для каждой из множества областей, соответствующих уровням окружения связи, путь для парковки в каждой области вычисляется с использованием параметра, соответствующего уровню окружения связи. Это обеспечивает возможность вычисления пути для парковки, соответствующего окружению связи, даже когда окружение связи отличается в каждой области.
Параметр, применяемый к каждой секции, не ограничен параметром, связанным с формированием пути для парковки, и параметр для управления перемещением транспортного средства V1 также может применяться к каждой секции.
[0044] Устройство 10 управления задает множество областей, соответствующих уровням окружения связи, и вычисляет путь для парковки, который не проходит через область, в которой уровень окружения связи оценивается как низкий.
Как проиллюстрировано на фиг. 8, поясняется случай, в котором транспортное средство V1 паркуется на целевом месте Mo для парковки. Когда окружение связи всего пространства около транспортного средства V1 является хорошим, путь для парковки для транспортного средства V1 представляет собой путь, в котором транспортное средство V1 выполняет остановку в позиции P3, переключает передачи и перемещается назад, чтобы достигать целевого места Mo для парковки. Как проиллюстрировано на чертеже, область A2, включающая в себя позицию P3, в которой выполняется поворот для парковки (временной остановки, переключения передач, руления), окружена посредством стены W, и окружение связи находится на уровне 3 (очень плохой). В таком случае, устройство 10 управления вычисляет путь для парковки, который не проходит через область A2, в которой окружение связи является очень плохим. В частности, устройство 10 управления вычисляет путь, в котором транспортное средство V1 поворачивает для парковки в позиции P2 (за пределами области A2), чтобы достигать целевого места Mo для парковки.
Путь для парковки вычисляется таким образом, что он не проходит через область, в которой уровень окружения связи оценивается как низкий, и в силу этого можно предотвращать ситуацию, в которой операция парковки транспортного средства, V1 не может выполняться вследствие прерывания связи в середине.
[0045] Снова ссылаясь на фиг. 2, на этапе 108, устройство 10 управления использует полученные параметры, чтобы вычислять путь для перемещения транспортного средства V1 в целевое место Mo для парковки.
[0046] На этапе 109, устройство 10 управления вычисляет управляющую информацию при перемещении транспортного средства V1 в целевое место Mo для парковки. Во-первых, устройство 10 управления получает параметры, используемые при вычислении управляющей информации. Параметры задаются для каждого уровня окружения связи. Устройство 10 управления считывает параметры, соответствующие уровню окружения связи, оцененному на этапе 106. Фиг. 9 иллюстрирует пример параметров, используемых для вычисления управляющей информации.
Параметры, используемые для вычисления управляющей информации, включают в себя любое одно или более из скорости, верхней предельной скорости, ускорения, замедления, угловой скорости рыскания, поперечного ускорения, величины руления, скорости руления, замедления для остановки и времени торможения для остановки, которые связаны с перемещением транспортного средства V1.
Каждый параметр задается для каждого уровня окружения связи. Первый параметр задается для уровня 1 окружения связи (нормальный), второй параметр задается для уровня 2 окружения связи (относительно более плохой, чем уровень 1 окружения связи), и третий параметр задается для уровня 3 окружения связи (относительно более плохой, чем уровень 2 окружения связи, т.е. очень плохой). В этом примере, уровни окружения связи и параметры классифицируются на три стадии, но число стадий не ограничено.
Посредством вычисления управляющей информации с использованием параметра, соответствующего уровню окружения связи, даже когда окружение связи является плохим, транспортное средство V1 может парковаться с содержимым управления, адаптированным к окружению связи.
[0047] В одном или более вариантов осуществления настоящего изобретения, следующие схемы предлагаются в качестве схем для вычисления управляющей информации, соответствующей окружению связи.
(1) Когда уровень окружения связи оценивается как низкий, устройство 10 управления изменяет скорость или ускорение транспортного средства V1 на меньшее значение, чем тогда, когда уровень окружения связи не оценивается как низкий, и управляет транспортным средством V1 на основе измененной скорости или ускорения. Как проиллюстрировано на фиг. 9, для скорости, первый параметр VR1, второй параметр VR2 и третий параметр VR3 задаются (VR1>VR2>VR3). Для ускорения, первый параметр AR1, второй параметр AR2 и третий параметр AR3 задаются (AR1>AR2>AR3). Как проиллюстрировано на чертеже, чем ниже уровень окружения связи, тем ниже задается скорость или ускорение.
Когда окружение связи является плохим, посредством уменьшения скорости/ускорения транспортного средства V1, можно подавлять поведение по замедлению, которое возникает, когда возникает прерывание связи. Если скорость или ускорение транспортного средства для транспортного средства V1 увеличивается, когда окружение связи является плохим, имеется вероятность того, что рабочая команда не может приниматься, и рабочая команда не может быстро выполняться. В этом случае, даже если оператор вводит рабочую команду, транспортное средство V1 не может выполнять рабочую команду, которая вызывает некомфортное ощущение у оператора.
[0048] Схема вычисления скорости, ускорения, замедления, верхней предельной скорости и верхнего предельного ускорения транспортного средства V1 при перемещении по пути для парковки не ограничена конкретным образом, и может использоваться любая схема, известная на момент подачи этой заявки. Хотя не ограничено конкретным образом, предпочтительно вычислять скорость, ускорение, замедление, верхнюю предельную скорость, верхнее предельное ускорение, скорость руления и поперечное ускорение таким образом, что влияние угловой скорости рыскания транспортного средства V1 на транспортное средство V1 минимизируется.
[0049] (2) Когда уровень окружения связи оценивается как низкий, устройство 10 управления задает верхнюю предельную скорость или верхнее предельное ускорение транспортного средства V1 равной меньшему значению, чем тогда, когда уровень окружения связи не оценивается как низкий, и управляет транспортным средством V1 на основе верхней предельной скорости или верхнего предельного ускорения. Как проиллюстрировано на фиг. 9, для верхней предельной скорости, первый параметр UVR1, второй параметр UVR2 и третий параметр UVR3 задаются (UVR1>UVR2>UVR3). Для верхнего предельного ускорения, первый параметр UAR1, второй параметр UAR2 и третий параметр UAR3 задаются (UAR1>UAR2>UAR3). Как проиллюстрировано на чертеже, чем ниже уровень окружения связи, тем ниже задается верхняя предельная скорость или верхнее предельное ускорение.
Когда окружение связи является плохим, посредством понижения верхней предельной скорости/верхнего предельного ускорения транспортного средства V1, можно подавлять возникновение поведения по замедлению, вызываемого, когда прерывание связи возникает, а также подавлять абсолютную величину поведения. Кроме того, посредством подавления верхней предельной скорости/верхнего предельного ускорения транспортного средства V1 до меньшего значения, рабочая команда может легко приниматься, даже когда окружение связи является плохим.
[0050] (3) Когда уровень окружения связи оценивается как низкий, устройство 10 управления задает любой один или более параметров, включающих в себя угловую скорость рыскания, поперечное ускорение, величину руления, скорость руления и замедление транспортного средства V1, чем тогда, когда уровень окружения связи не оценивается как низкий. Как проиллюстрировано на фиг. 9, для угловой скорости рыскания, первый параметр YR1, второй параметр YR2 и третий параметр YR3 задаются (YR1>YR2>YR3). Для поперечного ускорения, первый параметр HAR1, второй параметр HAR2 и третий параметр HAR3 задаются (HAR1>HAR2>HAR3). Как проиллюстрировано на чертеже, чем ниже уровень окружения связи, тем ниже задается верхняя предельная скорость или верхнее предельное ускорение. То же применимо к поперечному ускорению HAR1 и величине STR1 руления.
Когда окружение связи является плохим, посредством уменьшения параметров, включающих в себя угловую скорость рыскания, поперечное ускорение, величину руления, скорость руления и замедление транспортного средства V1, абсолютная величина поведения, вызываемого, когда прерывание связи возникает, может уменьшаться.
[0051] (4) Когда уровень окружения связи оценивается как низкий, устройство 10 управления задает время торможения для остановки от начала замедления транспортного средства V1 до остановки в целевом месте Mo для парковки равным большему времени, чем тогда, когда уровень окружения связи не оценивается как низкий, и управляет транспортным средством V1 с возможностью начинать замедление от времени начала замедления и парковаться на целевом месте Mo для парковки. Транспортное средство V1 начинает замедление от начальной точки замедления и останавливается в целевом месте Mo для парковки. Задание времени торможения для остановки транспортного средства V1 от времени начала замедления до остановки в целевом месте Mo для парковки равным длительному времени заключается в том, чтобы двигать начальную точку замедления на пути для парковки в вышележащую сторону (сторону начальной точки пути для парковки). Как проиллюстрировано на фиг. 9, в течение времени торможения для остановки, первый параметр STRP1, второй параметр STRP2 и третий параметр STRP3 задаются (STRP1<STRP2<STRP3).
Контроллер 10 задает время торможения для остановки равным большему времени по мере того, как окружение связи ухудшается, и транспортное средство V1 в силу этого может управляться с возможностью начинать замедление заблаговременно и останавливаться в целевом месте для парковки без внезапного замедления.
[0052] Когда устройство 10 управления задает множество областей в соответствии с уровнем окружения связи, устройство 10 управления получает параметр, соответствующий окружению связи каждой области, и вычисляет управляющую информацию для каждой области с использованием параметра. Посредством вычисления управляющей информации для каждой области, транспортное средство V1 может надлежащим образом управляться в соответствии с окружением связи области, за счет этого достигая эффективного перемещения транспортного средства V1 и уменьшенного времени операции парковки.
Аналогично вышеописанному примеру, проиллюстрированному на фиг. 7, когда множество областей распознается, параметр для формирования управляющей информации для каждой области получается. При получении управляющей информации для перемещения транспортного средства V1 вдоль пути RT для парковки, устройство 10 управления применяет различные параметры для областей A0, A1 и A2. На чертеже, окружение связи области A0 находится на уровне 1 (нормальный). Параметр пути из PO1 в PO2 на пути RT для парковки представляет собой первый параметр. Окружение связи области A1 находится на уровне 2 (плохо). Параметр пути из PO3 в позицию PO4 поворота для парковки и пути из PO4 в PO5 на пути RT для парковки представляет собой второй параметр. Окружение связи области A2 находится на уровне 3 (очень плохой). Параметр пути из PO5 в PO6 в качестве позиции остановки на пути RT для парковки представляет собой третий параметр.
Окружение связи не является однородным; в силу этого окружение связи оценивается для каждой области, и управляющая информация в каждой области вычисляется с использованием параметра, соответствующего уровню окружения связи. Это обеспечивает возможность вычисления управляющей информации, соответствующей окружению связи, даже когда окружение связи отличается в каждой области.
[0053] Как описано выше, уровень окружения связи может оцениваться в соответствии со временем прерывания связи. Устройство 10 управления может определять то, что уровень окружения связи является более низким по мере того, как время прерывания связи является большим. Устройство 10 управления может задавать значение параметра для вычисления управляющей информации в соответствии с продолжительностью времени прерывания. Например, по мере того, как время прерывания связи является большим, устройство 10 управления может задавать скорость, ускорение, замедление, верхнюю предельную скорость, верхнее предельное ускорение, угловую скорость рыскания, поперечное ускорение, величину руления и скорость руления равными большим значениям в соответствии с продолжительностью времени прерывания связи. Помимо этого или альтернативно, по мере того, как время прерывания связи является большим, время торможения для остановки от начала замедления до позиции остановки может быть более длительным.
[0054] В одном или более вариантов осуществления настоящего изобретения, когда окружение связи около транспортного средства V1 является плохим, подавляется акцентирование поведения (к примеру, скорости или ускорения) транспортного средства V1, и в силу этого, даже если транспортное средство V1 остановлено в аварийной ситуации вследствие прерывания связи, транспортное средство V1 может управляться таким образом, чтобы не демонстрировать акцентированное поведение.
[0055] Когда инструкция выполнения для процесса управления парковкой вводится на этапе 110, процедура переходит к этапу 111, на котором оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения выполняет процесс управления парковкой.
Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения управляет работой приводной системы 40 через контроллер 30 транспортного средства таким образом, что транспортное средство V1 перемещается вдоль пути для парковки в соответствии с управляющей информацией.
[0056] Оборудование 100 управления парковкой вычисляет сигналы команд управления в приводную систему 40 транспортного средства V1, к примеру, в EPS-электромотор, при возврате выходного значения датчика 50 угла поворота при рулении оборудования рулевого управления таким образом, что траектория движения транспортного средства V1 совпадает с вычисленным путем для парковки, и передает сигналы команд управления в приводную систему 40 или в контроллер 70 транспортного средства, который управляет приводной системой 40.
[0057] Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения включает в себя модуль управления парковкой. Модуль управления парковкой получает информацию диапазона переключения передач из модуля AT/CVT-управления, информацию скорости вращения колес из модуля ABS-управления, информацию угла поворота при рулении из модуля управления углом поворота при рулении, информацию частоты вращения двигателя из ECM и другую необходимую информацию. На ее основе, модуль управления парковкой вычисляет и выводит информацию с инструкциями по автоматизированному рулению в модуль EPS-управления, информацию с инструкциями, такую как предупреждение, в модуль управления измерительными приборами и т.д. Устройство 10 управления получает информационные элементы, которые получаются посредством датчика 50 угла поворота при рулении оборудования рулевого управления транспортного средства V1 и датчика 60 скорости транспортного средства и других датчиков транспортного средства через контроллер 70 транспортного средства.
[0058] Приводная система 40 согласно одному или более вариантов осуществления настоящего изобретения управляет транспортным средством V1 с возможностью перемещаться (двигаться) из текущей позиции на целевое место Mo для парковки посредством вождения на основе сигналов команд управления, полученных из оборудования 100 управления парковкой. Оборудование рулевого управления согласно одному или более вариантов осуществления настоящего изобретения представляет собой приводной механизм, который перемещает транспортное средство V1 в направлениях вправо и влево. EPS-электромотор, включенный в приводную систему 40, приводит в действие механизм усилителя рулевого управления оборудования рулевого управления на основе сигналов команд управления, полученных из оборудования 100 управления парковкой, чтобы управлять величиной руления, и управляет операцией при перемещении транспортного средства V1 на целевое место Mo для парковки. Содержимое управления и схема работы для парковки транспортного средства V1не ограничены конкретным образом, и любая схема, известная на момент подачи этой заявки, может надлежащим образом применяться.
[0059] Когда оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения управляет транспортным средством V1 с возможностью перемещаться на целевое место Mo для парковки по пути, вычисленному на основе позиции P4 транспортного средства V1 и позиции целевого места Mo для парковки, акселератор и тормоз автоматически управляются на основе указанной управляющей скорости транспортного средства (заданной скорости транспортного средства), и работа оборудования рулевого управления также автоматически управляется в соответствии со скоростью транспортного средства. Таким образом, во время управления парковкой согласно одному или более вариантов осуществления настоящего изобретения, операция руления и операция нажатия педали акселератора/тормоза автоматически выполняются. Кроме того, оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения также является применимым к парковке вручную, при которой водитель выполняет операцию с акселератором, тормозом и механизмом рулевого управления.
[0060] Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения допускает процесс парковки на основе удаленного управления, в котором транспортное средство V1 без водителя паркуется посредством передачи команды задания для целевого места Mo для парковки, команды начала процесса парковки, команда приостановки/отмены парковки и т.д. в транспортное средство V1 извне.
[0061] Моделирование проведено, чтобы подтверждать преимущества одного или более вариантов осуществления настоящего изобретения. В этом моделировании, профили поведения (к примеру, скорости) транспортного средства V1 получены с использованием различных параметров в соответствии с уровнем окружения связи. Результаты моделирования описываются со ссылкой на фиг. 10, фиг. 11A и фиг. 11B.
Фиг. 10 является схемой для описания условий моделирования. Транспортное средство в качестве модели трогается с места из первой позиции VP1 и перемещается по первому пути T1 во вторую позицию VP2. Транспортное средство затем возвращается во вторую позицию VP2 и перемещается по второму пути T2 в третью позицию VP3. Третья позиция VP3 представляет собой целевую позицию PK, в которой транспортное средство V1 останавливается. Моделирование проведено при идентичных условиях, когда окружение связи является нормальным, и когда окружение связи является плохим. При моделировании, условия задаются в качестве ширины полосы движения: ширина полосы движения (м), ширины места для парковки: ширина ячейки (м), ширины транспортного средства: широта (м), угла начала парковки: начало (градус), и угла завершения парковки: финиш (градус). Эти условия определяют приемлемые пути и операции. Оптимальный путь (путь, по которому парковка может выполняться за минимальное время, или путь, по которому поведение подавляется) формируется из числа приемлемых путей и операций, и моделирование выполняется.
[0062] Фиг. 11A иллюстрирует изменения во времени целевой скорости (a), кривизны пути (b), оставшегося расстояния (c), ускорения (d) и резкого перемещения относительно вертикальной оси (e), когда окружение связи является нормальным (является относительно более хорошим). Фиг. 11B иллюстрирует изменения во времени целевой скорости (a), кривизны пути (b), оставшегося расстояния (c), ускорения (d) и резкого перемещения относительно вертикальной оси (e), когда окружение связи является плохим (относительно более плохим). На фиг. 11A и фиг. 11B, Traj1 на чертеже представляет профиль для первого пути T1, и Traj2 представляет профиль для второго пути T2.
[0063] Сравнение должно проводиться между профилями по фиг. 11A и фиг. 11B.
(1) Максимальное значение 11B1 целевой скорости профиля, когда окружение связи является относительно более плохим, как проиллюстрировано на фиг. 11B(a), управляется с возможностью быть ниже максимального значения 11A1 целевой скорости профиля, когда окружение связи является относительно более хорошим, как проиллюстрировано на фиг. 11A(a). Когда окружение связи является относительно более плохим, максимальное значение целевой скорости может относительно уменьшаться, чтобы за счет этого подавлять поведение транспортного средства при прерывании связи.
(2) Темп изменения кривизны 11B2 профиля, когда окружение связи является относительно более плохим, как проиллюстрировано на фиг. 11B(b), управляется с возможностью быть ниже темпа изменения кривизны 11A2 профиля, когда окружение связи является относительно более хорошим, как проиллюстрировано на фиг. 11A(b). Когда окружение связи является относительно более плохим, темп изменения кривизны может относительно уменьшаться, чтобы за счет этого подавлять поведение транспортного средства при прерывании связи.
(3) Время 11B3 до тех пор, пока оставшееся расстояние профиля, когда окружение связи является относительно более плохим, не станет нулевым (завершение парковки), как проиллюстрировано на фиг. 11B(c), управляется с возможностью превышать время 11A3 до тех пор, пока оставшееся расстояние профиля, когда окружение связи является относительно более хорошим, не станет нулевым (завершение парковки), как проиллюстрировано на фиг. 11A(c). Когда окружение связи является относительно более плохим, время операции парковки может быть более длительным таким образом, что изменение поведения транспортного средства V1 является относительно небольшим, чтобы за счет этого подавлять поведение транспортного средства при прерывании связи.
(4) Ширина варьирования ускорения 11B4 профиля, когда окружение связи является относительно более плохим, как проиллюстрировано на фиг. 11B(d), управляется с возможностью быть меньше ширины варьирования ускорения 11A4 профиля, когда окружение связи является относительно более хорошим, как проиллюстрировано на фиг. 11A(d). Когда окружение связи является относительно более плохим, ширина варьирования ускорения может относительно уменьшаться, чтобы за счет этого подавлять поведение транспортного средства при прерывании связи.
(5) Максимальное значение/ширина 11B5 варьирования резкого перемещения относительно вертикальной оси профиля, когда окружение связи является относительно более плохим, как проиллюстрировано на фиг. 11B(e), управляется с возможностью быть меньше максимального значения/величины 11A5 варьирования резкого перемещения относительно вертикальной оси профиля, когда окружение связи является относительно более хорошим, как проиллюстрировано на фиг. 11A(e). Когда окружение связи является относительно более плохим, максимальное значение/величина варьирования резкого перемещения относительно вертикальной оси может относительно уменьшаться, чтобы за счет этого подавлять поведение транспортного средства при прерывании связи.
[0064] Способ управления парковкой согласно одному или более вариантов осуществления настоящего изобретения используется в оборудовании управления парковкой, как указано выше, и в силу этого имеет следующие преимущества. Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения сконфигурировано и работает так, как указано выше, и в силу этого имеет следующие преимущества.
[0065] (1) Согласно способу управления парковкой в одном или более вариантов осуществления настоящего изобретения, транспортное средство V1 управляется с тем, чтобы парковаться на целевом месте для парковки с содержимым управления в соответствии с результатом оценки окружения связи около транспортного средства V1, и в силу этого даже в местоположении, в котором удовлетворительная связь не может выполняться вследствие окружения около транспортного средства V1, присутствия объекта, отсутствия инфраструктуры связи, возмущений и т.д., транспортное средство V1 может парковаться посредством способа, адаптированного к окружению связи.
[0066] (2) Согласно способу управления парковкой в одном или более вариантов осуществления настоящего изобретения, когда окружение связи оценивается как плохое, время, требуемое для операции парковки, является более длительным, чем тогда, когда окружение связи не оценивается как плохое. Через эту операцию, даже в местоположении, в котором удовлетворительная связь не может выполняться вследствие окружения около транспортного средства V1, присутствия объекта, отсутствия инфраструктуры связи, возмущений и т.д., время, требуемое для операции парковки, является более длительным, и транспортное средство V1 может парковаться посредством способа, адаптированного к окружению связи.
Кроме того, согласно способу управления парковкой в одном или более вариантов осуществления настоящего изобретения, время, требуемое для операции парковки, является более длительным, чтобы за счет этого подавлять величину изменения относительной позиционной взаимосвязи между транспортным средством V1 и вводным терминальным устройством 5; в силу этого состояние приема рабочей команды для транспортного средства V1 стабилизируется, и рабочая команда может легко приниматься.
[0067] (3) Согласно способу в одном или более вариантов осуществления настоящего изобретения, управляющая информация может вычисляться с использованием параметра, соответствующего уровню окружения связи. Даже когда окружение связи является плохим, транспортное средство V1 может парковаться с содержимым управления, адаптированным к окружению связи. В одном или более вариантов осуществления настоящего изобретения, когда окружение связи около транспортного средства V1 является плохим, подавляется акцентирование поведения (к примеру, скорости или ускорения) транспортного средства V1, и в силу этого, даже если транспортное средство V1 остановлено в аварийной ситуации вследствие прерывания связи, транспортное средство V1 может управляться таким образом, чтобы не демонстрировать акцентированное поведение.
[0068] (4) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда окружение связи является плохим, скорость/ускорение транспортного средства V1 может понижаться, чтобы за счет этого подавлять поведение по замедлению, вызываемое после возникновения прерывания связи. Кроме того, скорость/ускорение может понижаться, чтобы за счет этого подавлять увеличение величины перемещения транспортного средства, когда связь прерывается.
[0069] (5) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда окружение связи является плохим, верхняя предельная скорость/верхнее предельное ускорение транспортного средства V1 может понижаться, чтобы за счет этого подавлять поведение по замедлению, вызываемое после возникновения прерывания связи. Посредством подавления верхней предельной скорости/верхнего предельного ускорения транспортного средства V1 до меньшего значения, рабочая команда может легко приниматься, даже когда окружение связи является плохим.
[0070] (6) Согласно способу в одном или более вариантов осуществления настоящего изобретения, время торможения для остановки задается большим по мере того, как окружение связи ухудшается, и транспортное средство V1 в силу этого может управляться с возможностью начинать замедление заблаговременно и останавливаться в целевом месте для парковки без внезапного замедления.
[0071] (7) Согласно способу в одном или более вариантов осуществления настоящего изобретения, путь для парковки может вычисляться с использованием параметра, соответствующего уровню окружения связи, чтобы за счет этого парковать транспортное средство с путем, адаптированным к окружению связи, даже когда окружение связи является плохим. Когда окружение связи является плохим, посредством вычисления различного пути для парковки с использованием различного параметра, окружение связи может поддерживаться или улучшаться.
[0072] (8) Согласно способу в одном или более вариантов осуществления настоящего изобретения, путь для парковки, имеющий меньшую длину пути, формируется по мере того, как уровень окружения связи является более низким, и можно снижать риск возникновения прерывания связи при перемещении по пути для парковки.
[0073] (9) Согласно способу в одном или более вариантов осуществления настоящего изобретения, посредством формирования пути для парковки, имеющего меньшее расстояние от начальной точки пути для парковки до позиции поворота для парковки (позиции, в которой выполняется переключение передач) по мере того, как уровень окружения связи является более низким, операция поворота для парковки (операция перемещения назад после выполнения остановки) может выполняться в точке ближе к вводному терминальному устройству 5 или пользователю. Это приводит к сокращенному пути для парковки, и в силу этого можно снижать риск возникновения прерывания связи при перемещении по пути для парковки.
[0074] (10) Согласно способу в одном или более вариантов осуществления настоящего изобретения, путь для парковки формируется таким образом, что ширина зазора от объекта больше по мере того, как уровень окружения связи является более низким. Это обеспечивает возможность выполнения операции поворота для парковки (операции перемещения назад после выполнения остановки) в позиции на большом расстоянии от объекта (например, стены W). Когда уровень окружения связи является низким, посредством рассмотрения достаточного расстояния между транспортным средством V1 и стеной W, можно обеспечивать область перемещения для транспортного средства V1 и гарантировать степень свободы в перемещении транспортного средства V1.
[0075] (11) Такие объекты, как конструкции и другие транспортные средства, присутствуют около транспортного средства, так что окружение связи не является однородным. Согласно способу в одном или более вариантов осуществления настоящего изобретения, для каждой из множества областей, соответствующих уровням окружения связи, путь для парковки в каждой области вычисляется с использованием параметра, соответствующего уровню окружения связи. Это обеспечивает возможность вычисления пути для парковки, соответствующего окружению связи, даже когда окружение связи отличается в каждой области.
[0076] (12) Согласно способу в одном или более вариантов осуществления настоящего изобретения, путь для парковки вычисляется таким образом, что он не проходит через область, в которой уровень окружения связи является низким, и в силу этого даже когда область, в которой уровень окружения связи является низким, присутствует, автоматизированное управление парковкой может выполняться посредством удаленного управления. Другими словами, можно предотвращать ситуацию, в которой операция парковки транспортного средства V1 не может выполняться вследствие прерывания связи в середине.
[0077] (13) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда уровень окружения связи оценивается как низкий, изменяется частота, на которой передается и принимается рабочая команда. Посредством изменения частоты, может улучшаться окружение связи.
[0078] (14) Согласно способу в одном или более вариантов осуществления настоящего изобретения, при оценке окружения связи около транспортного средства V1, уровень окружения связи оценивается в соответствии с позиционной взаимосвязью (например, расстоянием и направлением) между транспортным средством V1 и вводным терминальным устройством 5, которое передает рабочую команду, и за счет этого можно надлежащим образом оценивать окружение связи, когда процесс удаленной парковки выполняется с использованием вводного терминального устройства 5.
[0079] (15) Согласно способу в одном или более вариантов осуществления настоящего изобретения, при оценке окружения связи около транспортного средства V1, объекты около транспортного средства V1 обнаруживаются, уровень окружения связи оценивается в соответствии с результатами обнаружения объектов, и за счет этого можно надлежащим образом оценивать окружение связи, когда процесс удаленной парковки выполняется с использованием вводного терминального устройства 5.
[0080] (16) Согласно способу в одном или более вариантов осуществления настоящего изобретения, при оценке окружения связи около транспортного средства V1, уровень окружения связи оценивается как более низкий по мере того, как расстояние между вводным терминальным устройством 5 и объектом укорачивается, или по мере того, как расстояние между транспортным средством 1 и объектом укорачивается, и за счет этого можно надлежащим образом оценивать окружение связи, когда процесс удаленной парковки выполняется, с учетом возмущений помех при многолучевом распространении посредством объекта.
[0081] (17) Согласно способу в одном или более вариантов осуществления настоящего изобретения, посредством обращения к информации 131 окружения связи, которая предварительно ассоциирована с позиционной информацией, и оценки окружения связи около транспортного средства V1 на основе информации окружения связи около транспортного средства V1, окружение связи может оцениваться с учетом состояния (атрибута) каждой точки и того факта, что прерывание связи возникает в предыдущие разы.
[0082] (18) Согласно способу в одном или более вариантов осуществления настоящего изобретения, при оценке окружения связи около транспортного средства V1, уровень окружения связи оценивается в соответствии с ситуацией незанятости полосы частот радиоволн связи, используемых около транспортного средства V1, и в силу этого окружение связи может точно оцениваться на основе фактической ситуации связи.
[0083] (19) Согласно способу в одном или более вариантов осуществления настоящего изобретения, уровень окружения связи оценивается на основе состояния прерывания связи около транспортного средства V1, и за счет этого можно оценивать окружение связи на основе фактической ситуации.
[0084] (20) Согласно способу в одном или более вариантов осуществления настоящего изобретения, когда уровень окружения связи оценивается как низкий посредством варьирования порогового значения оценки для оценки состояния прерывания таким образом, что возникновение прерывания связи с большей вероятностью определяется, возникновение прерывания связи может определяться с высокой степенью точности. Это позволяет надлежащим образом реагировать на прерывание связи, и в силу этого можно предотвращать возникновение замедления вследствие возникновения прерывания связи.
[0085] (21) Вышеописанный способ управления парковкой/способ отображения информации парковки может осуществляться с использованием оборудования 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения. Оборудование 100 управления парковкой согласно одному или более вариантов осуществления настоящего изобретения в силу этого имеет вышеописанную работу и преимущества.
[0086] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
Описание номеров ссылок
[0087] 1000 - система управления парковкой
100 - оборудование управления парковкой
10 - устройство управления
11 - CPU
12 - ROM
13 - RAM
20 - устройство ввода
21 - устройство связи
30 - устройство вывода
31 - дисплей
1a-1d - камеры
2 - устройство обработки изображений
3 - устройство измерения дальности
5 - вводное терминальное устройство
200 - бортовое устройство
40 - приводная система
50 - датчик угла поворота при рулении
60 - датчик скорости транспортного средства
70 - контроллер транспортного средства
V1 - транспортное средство
V2, V3 - другое транспортное средство
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2016 |
|
RU2719106C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736518C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2730808C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736520C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736960C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2738780C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2735340C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2016 |
|
RU2714656C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2744447C1 |
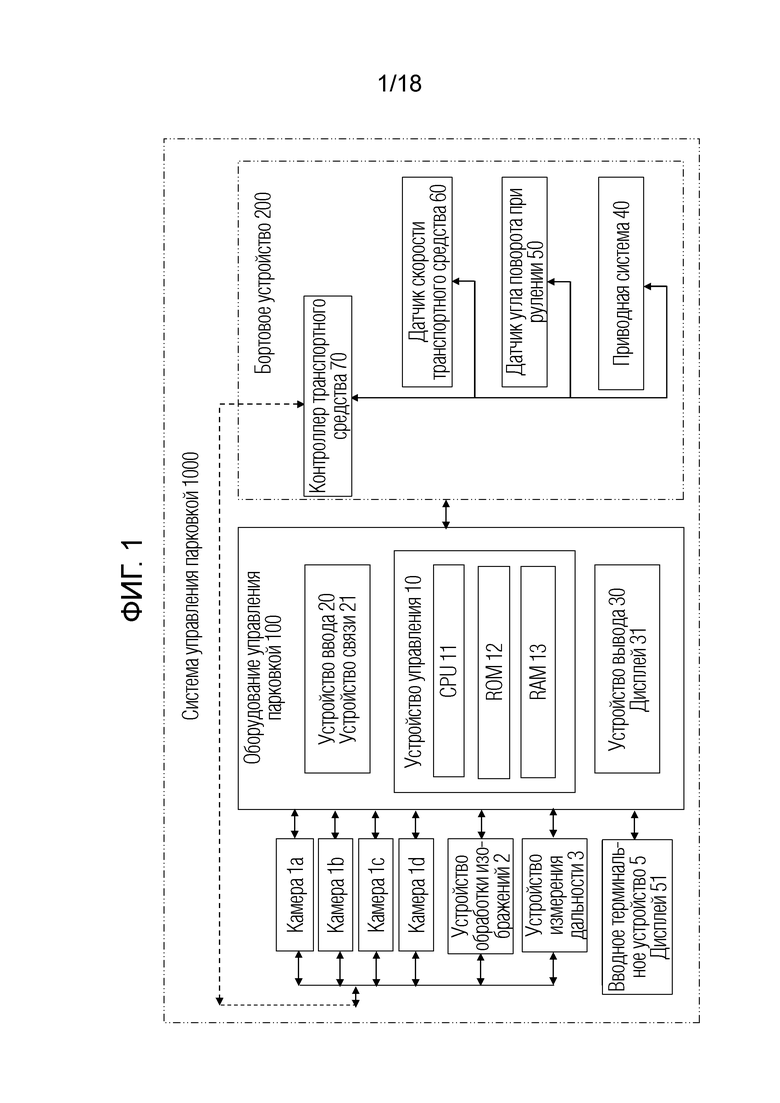
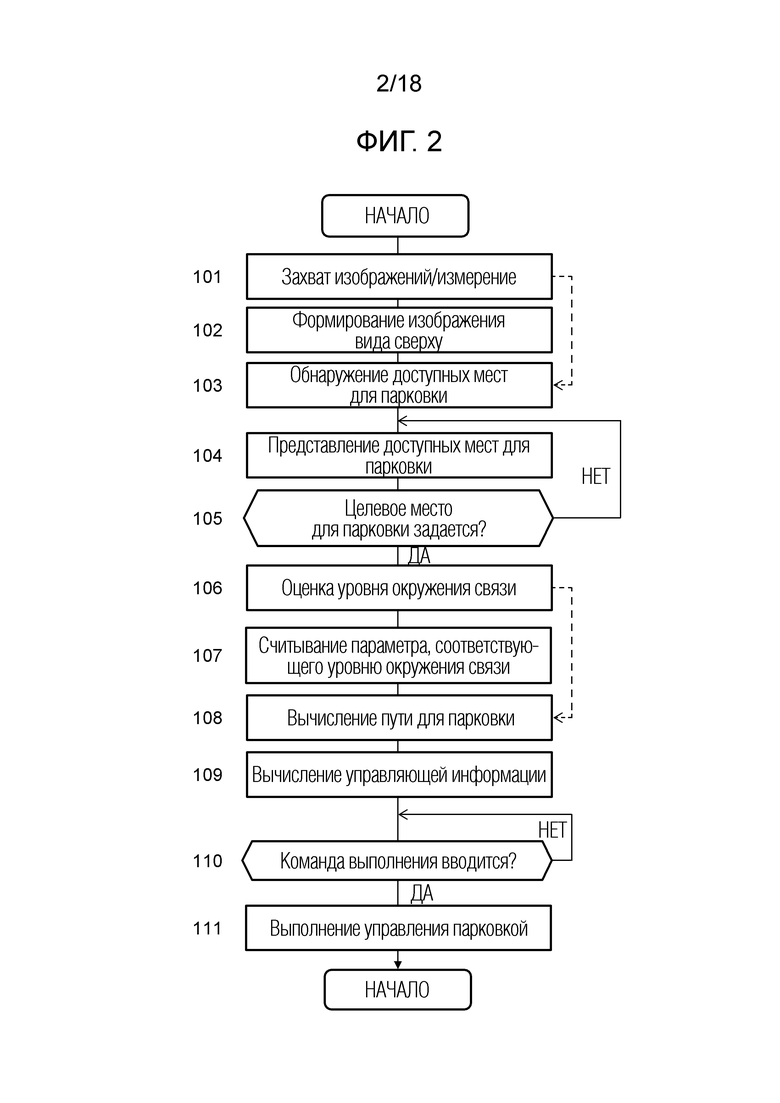
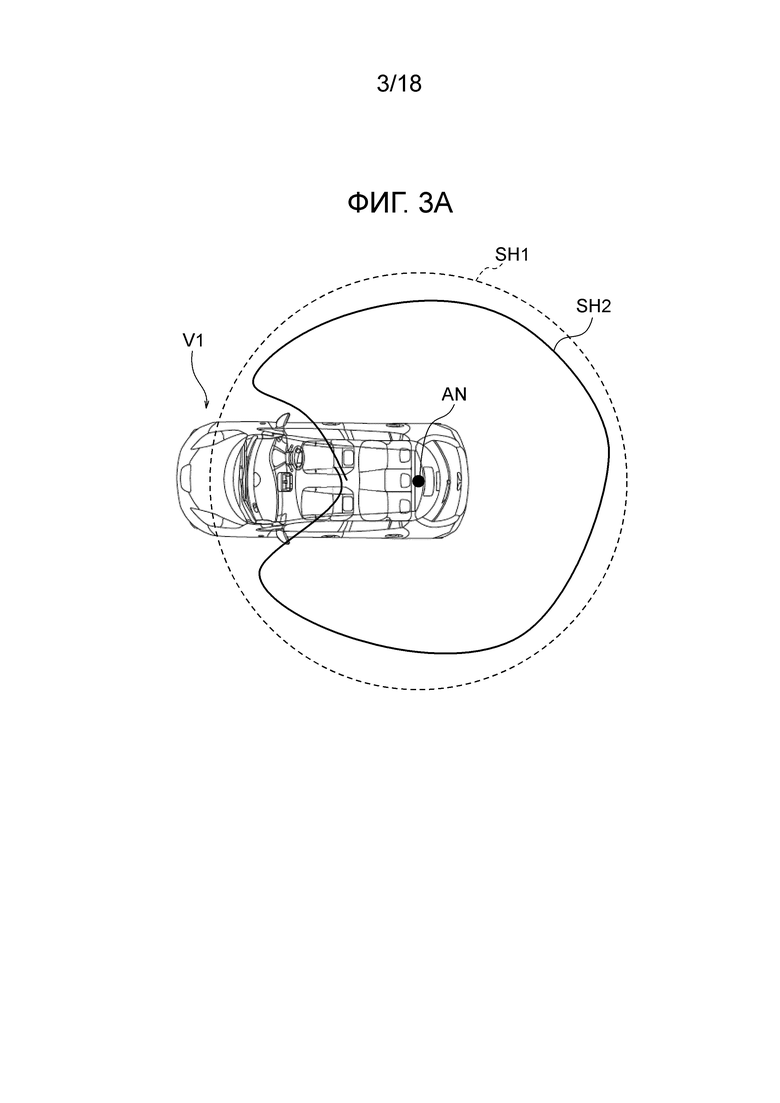
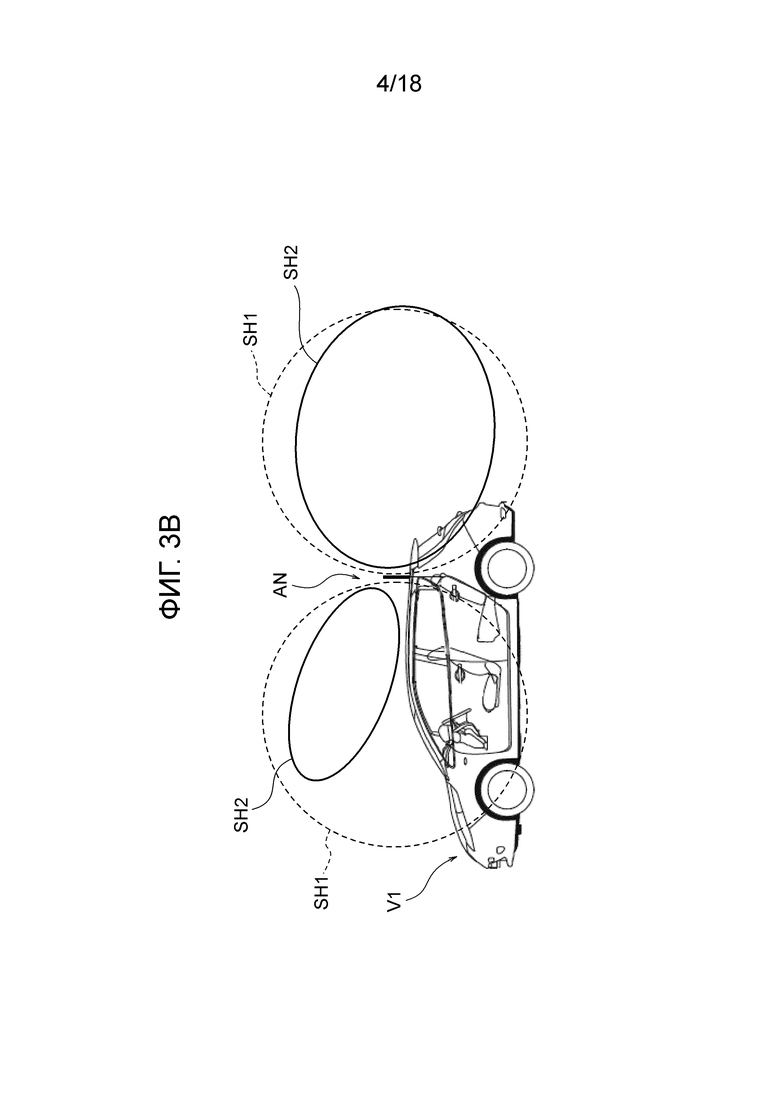
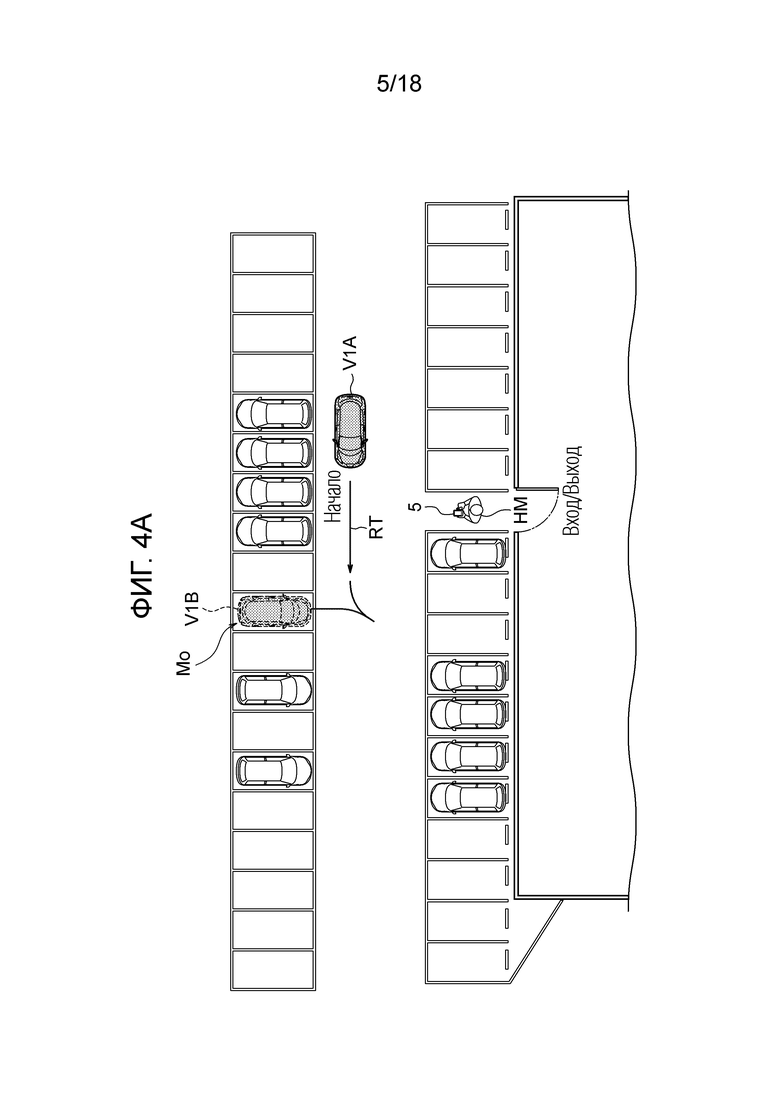
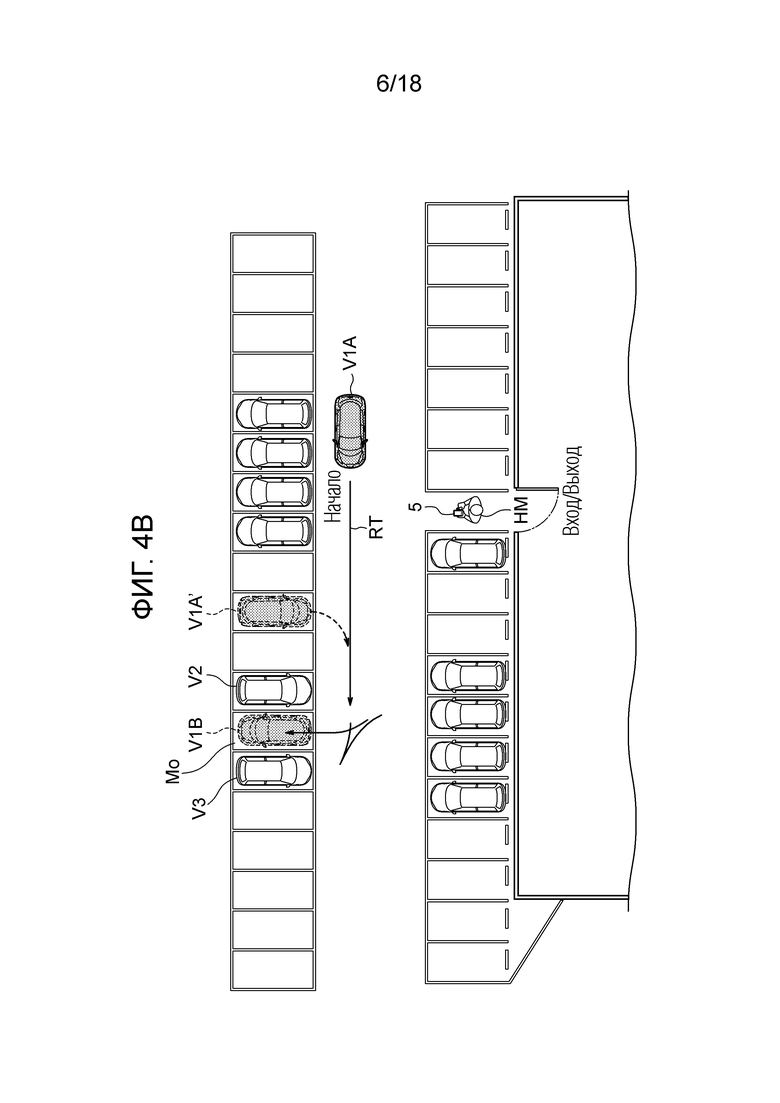
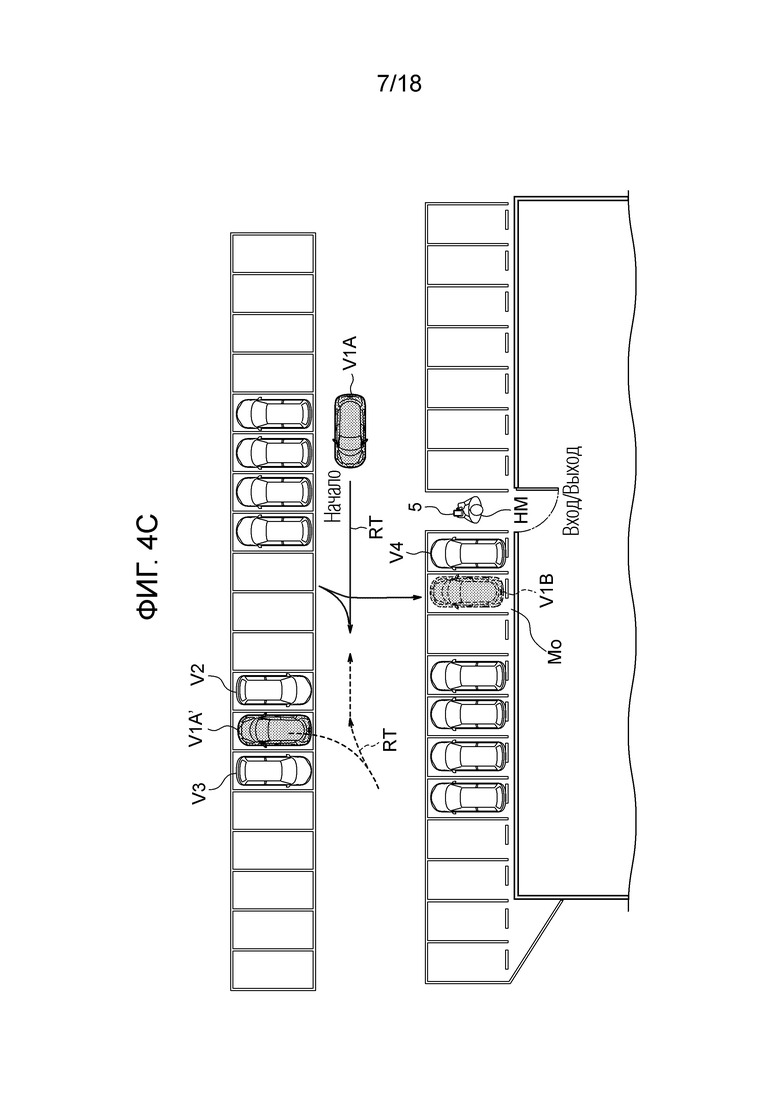
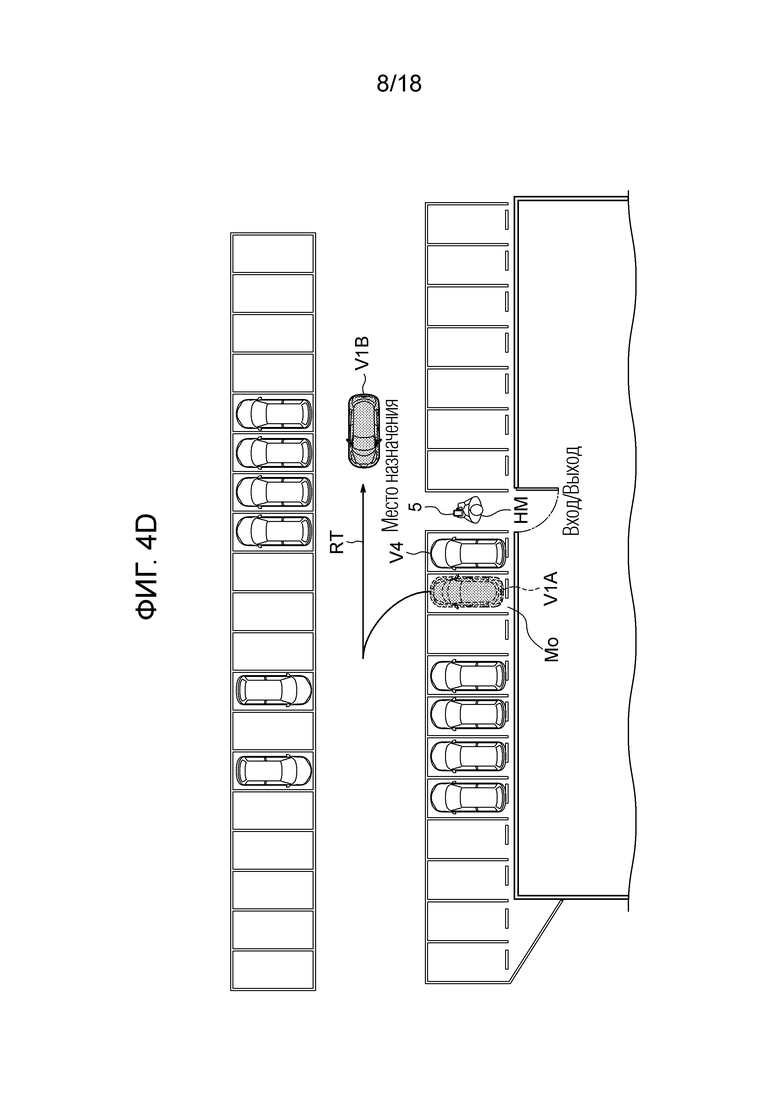
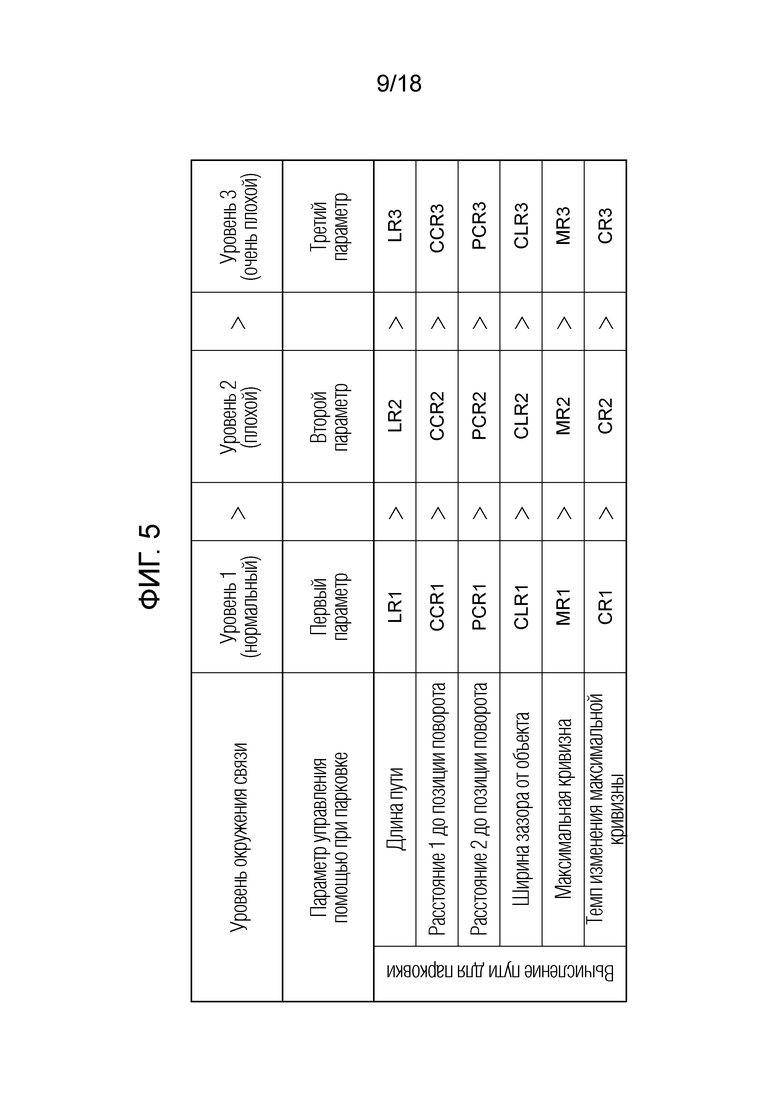

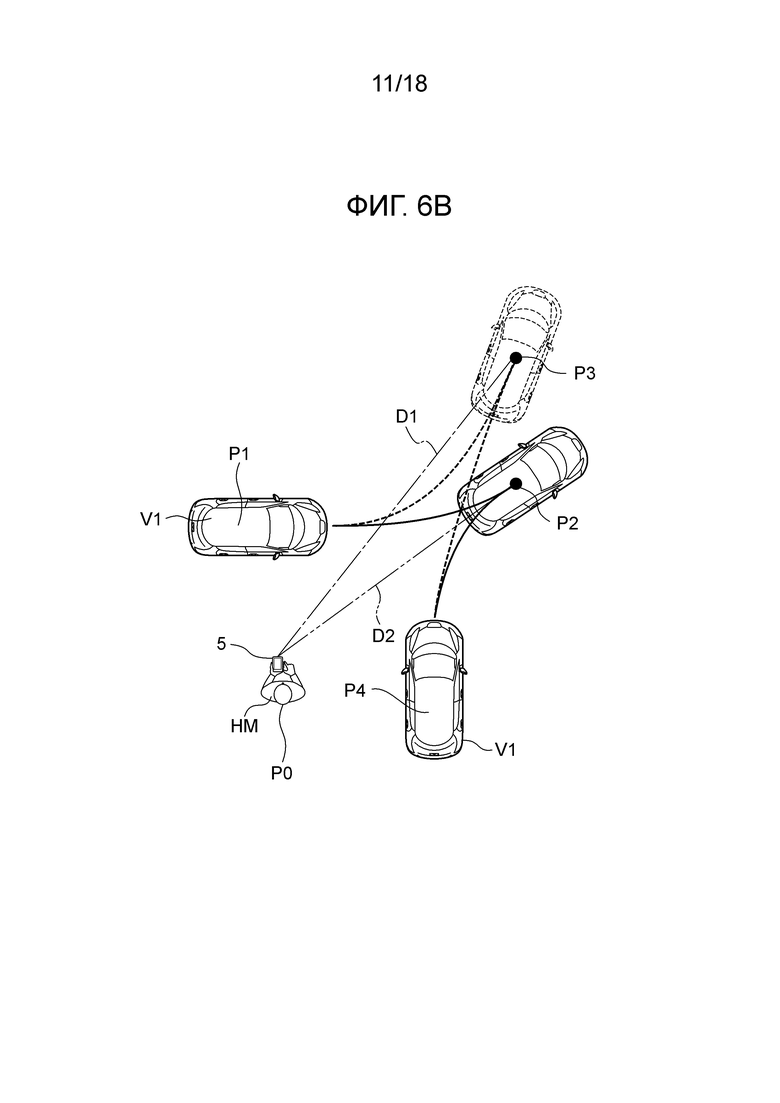
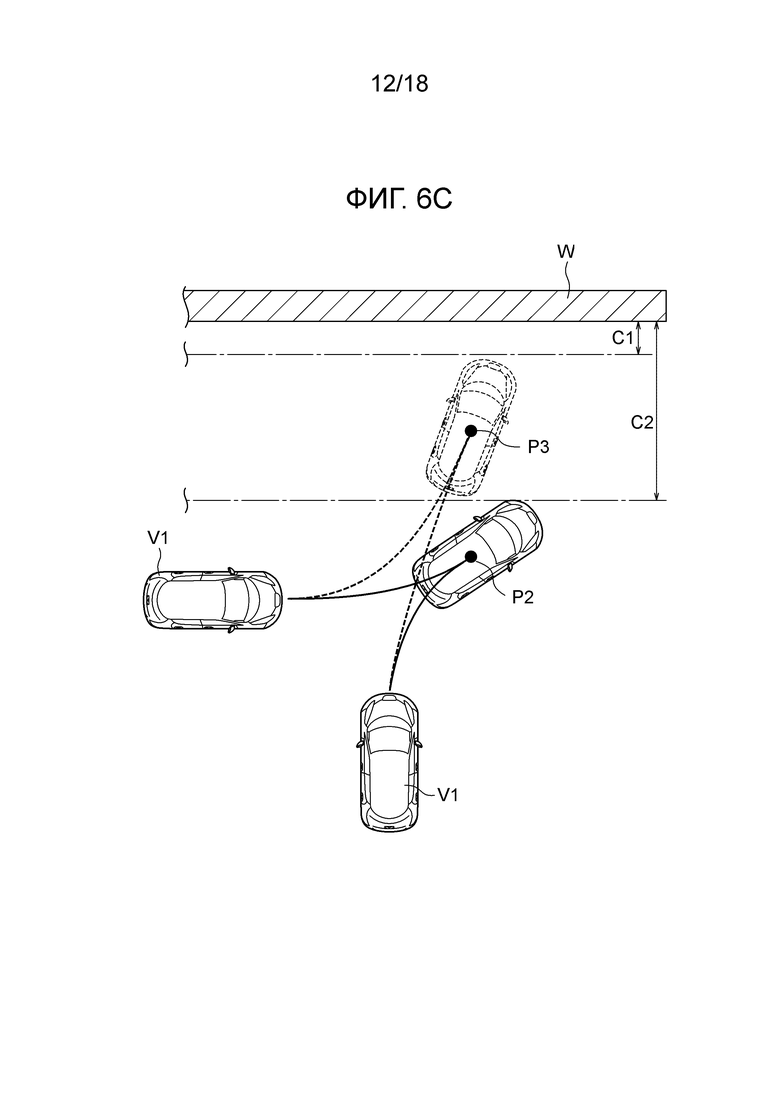
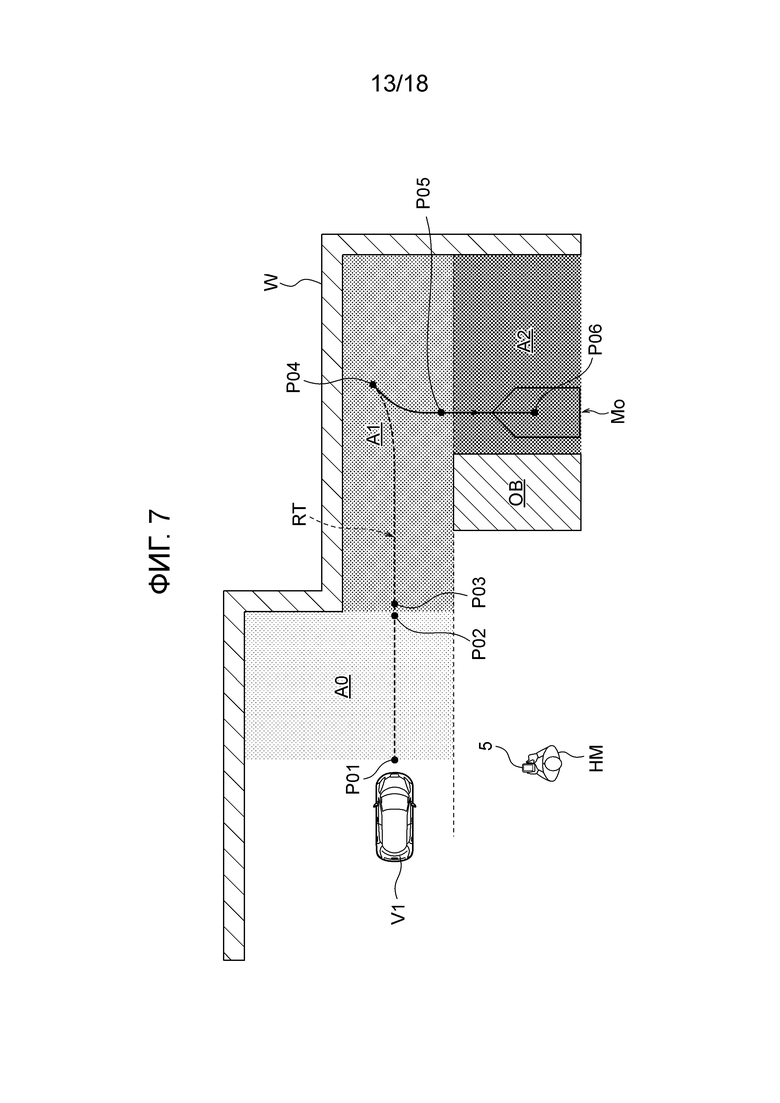
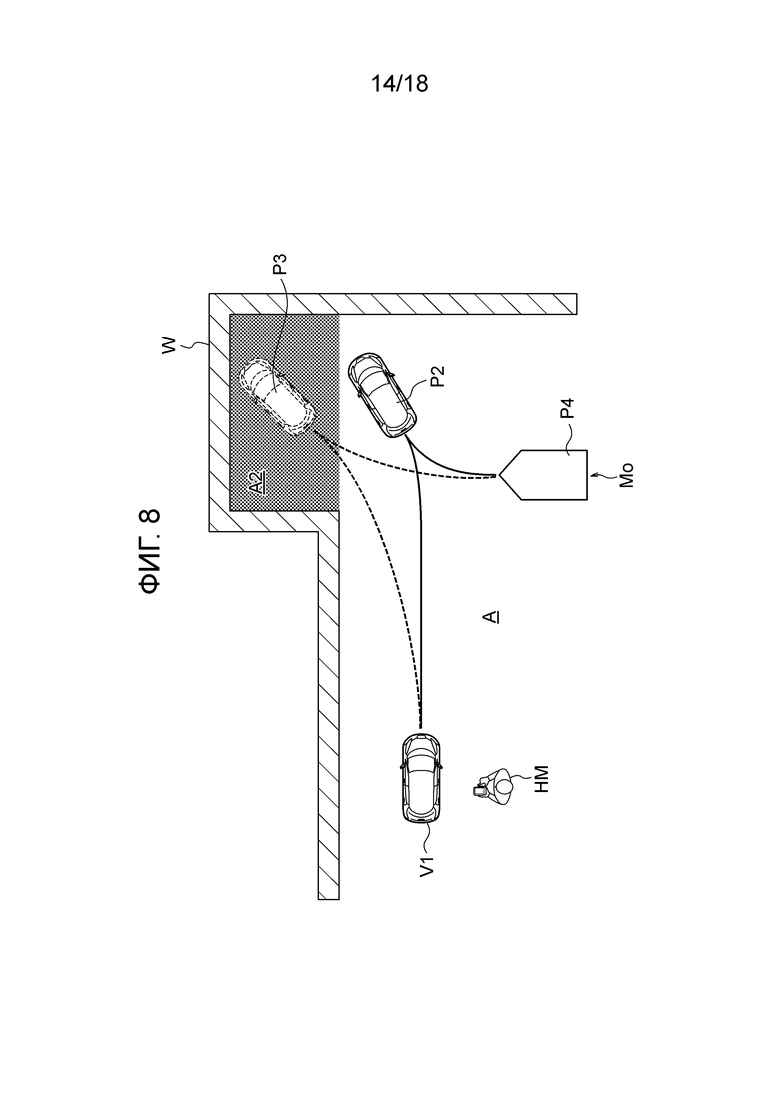
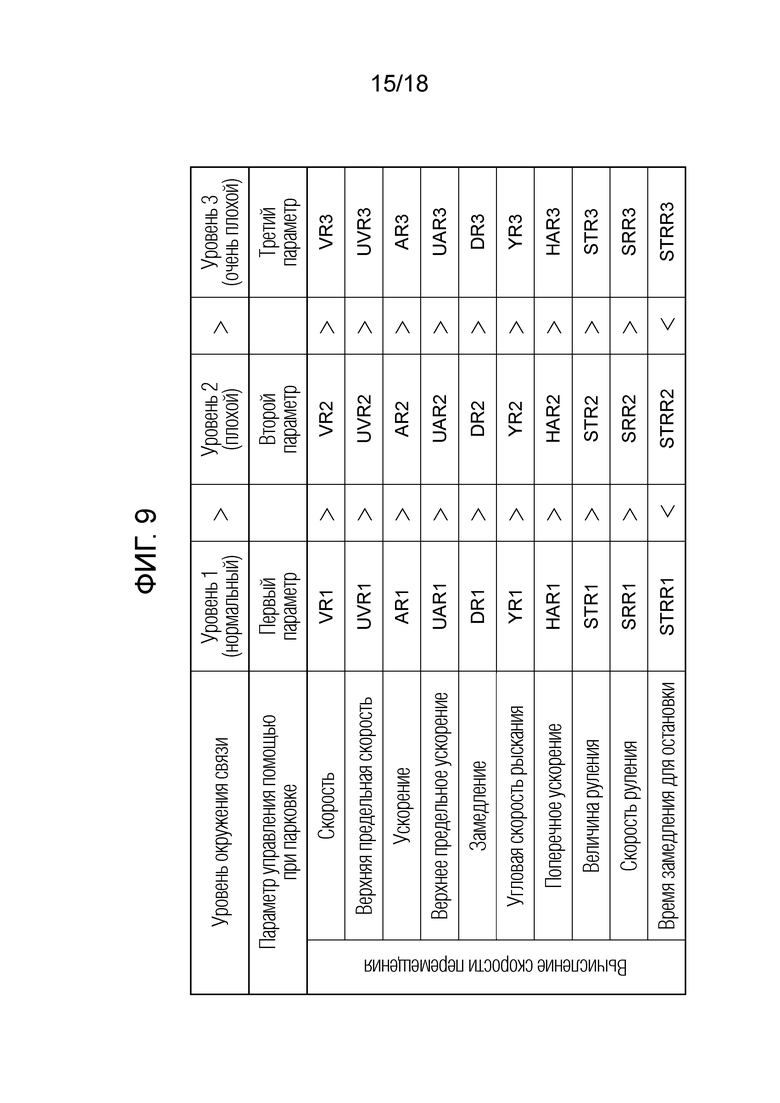
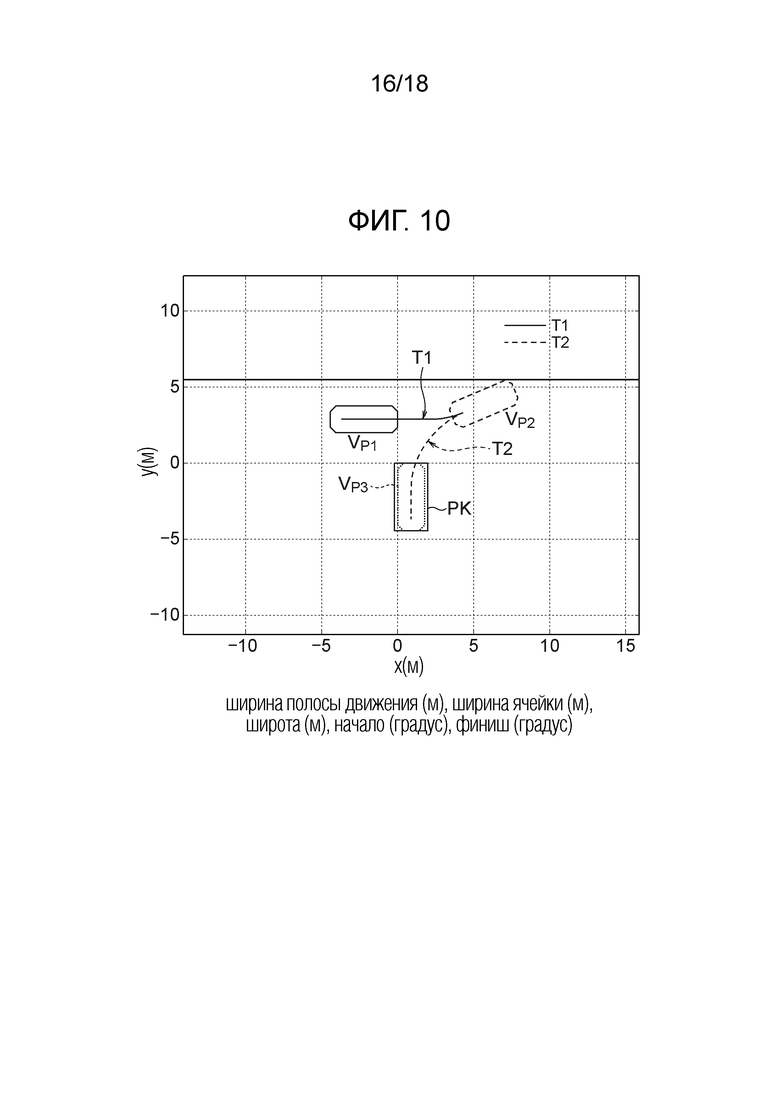
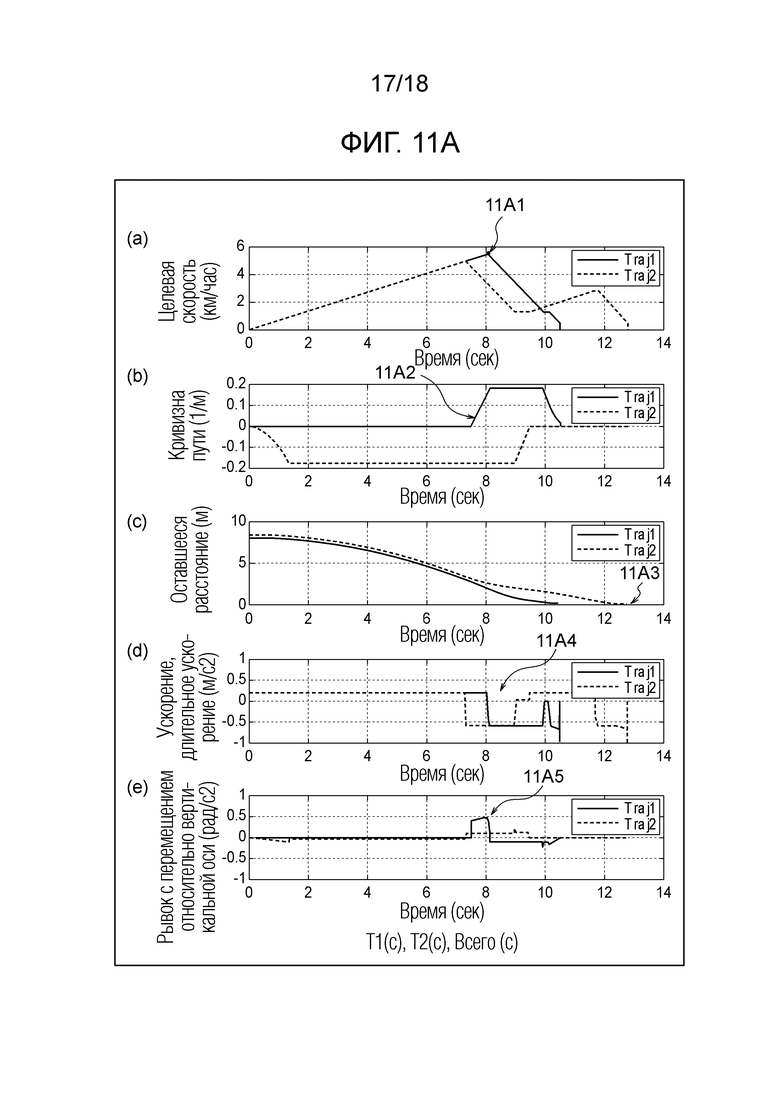
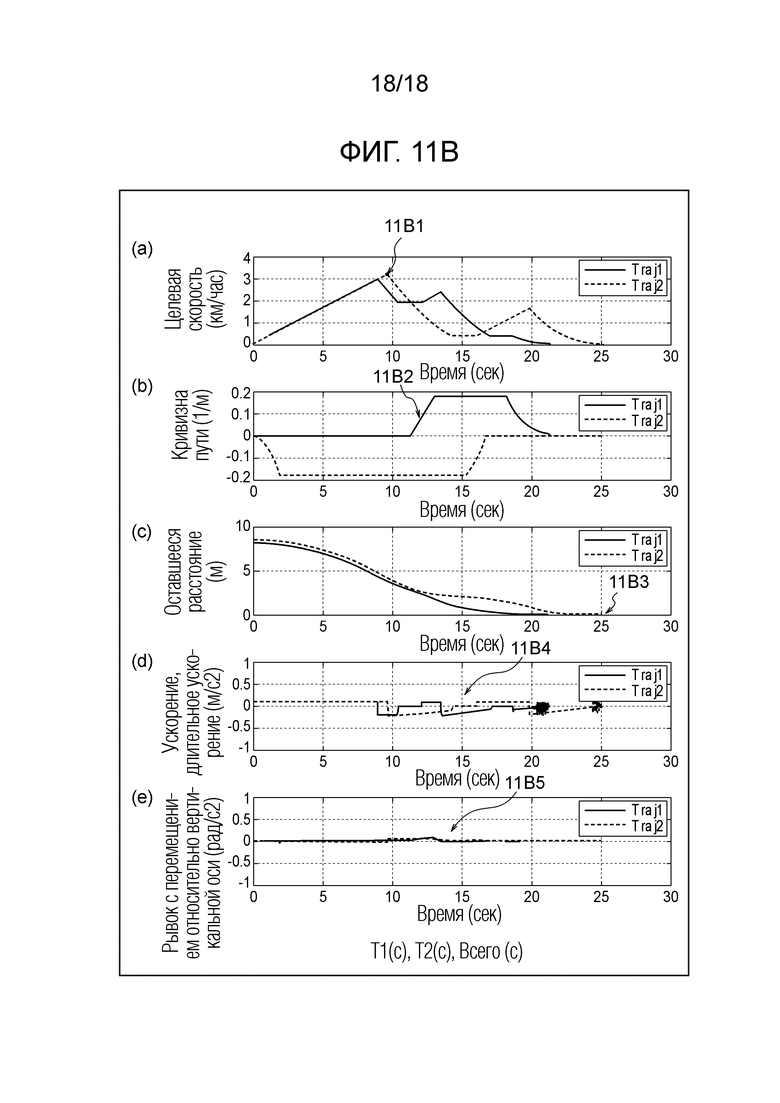
Изобретение относится к способу и оборудованию управления парковкой. Способ управления парковкой для управления транспортным средством на основе рабочей команды, относящейся к управлению парковкой, полученной извне транспортного средства. Способ управления парковкой содержит этапы, на которых оценивают уровень среды связи, около транспортного средства, в отношении связи для передачи рабочей команды, относящейся к управлению парковкой, в транспортное средство, вычисляют параметр, относящийся к управлению транспортным средством, используемый для выполнения управления парковкой, в соответствии с уровнем среды связи и управляют транспортным средством с тем, чтобы парковаться на основе упомянутого параметра. Достигается повышение безопасности парковки транспортного средства. 2 н. и 18 з.п. ф-лы. 18 ил. 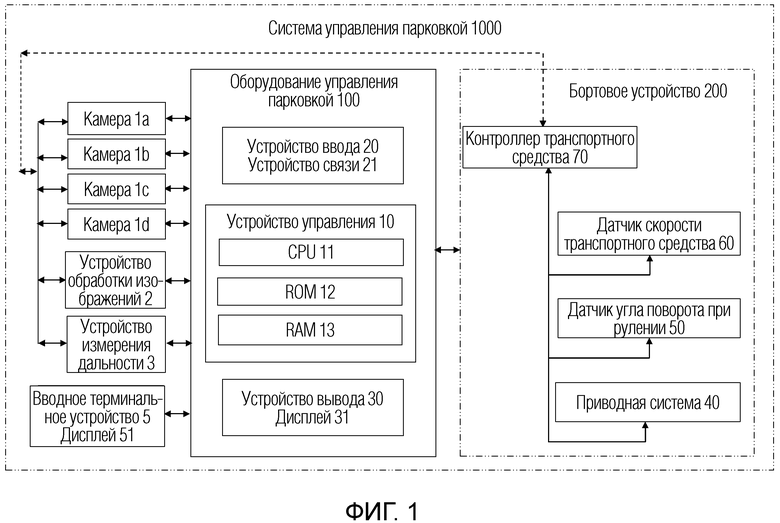
1. Способ управления парковкой для управления транспортным средством на основе рабочей команды, относящейся к управлению парковкой, полученной извне транспортного средства, при этом способ управления парковкой содержит этапы, на которых:
- оценивают, около транспортного средства, уровень среды связи в отношении связи для передачи рабочей команды, относящейся к управлению парковкой, в транспортное средство;
- вычисляют параметр, относящийся к управлению транспортным средством, используемый для выполнения управления парковкой, в соответствии с уровнем среды связи; и
- управляют транспортным средством с тем, чтобы парковаться на основе упомянутого параметра.
2. Способ управления парковкой по п. 1, в котором управление транспортным средством в соответствии с уровнем среды связи включает в себя этапы, на которых:
- вычисляют управляющую информацию для транспортного средства в соответствии с уровнем среды связи; и
- управляют транспортным средством с тем, чтобы парковаться на основе управляющей информации.
3. Способ управления парковкой по п. 2, в котором управляющая информация включает в себя скорость или ускорение транспортного средства,
когда уровень среды связи оценивается как низкий, скорость или ускорение транспортного средства задаются ниже, чем тогда, когда уровень среды связи не оценивается как низкий, и
транспортное средство управляется с тем, чтобы парковаться на основе заданной скорости или ускорения.
4. Способ управления парковкой по п. 2 или 3, в котором управляющая информация включает в себя верхнюю предельную скорость или верхнее предельное ускорение транспортного средства,
когда уровень среды связи оценивается как низкий, верхняя предельная скорость или верхнее предельное ускорение транспортного средства задается ниже, чем тогда, когда уровень среды связи не оценивается как низкий, и
транспортное средство управляется с тем, чтобы парковаться на основе верхней предельной скорости или верхнего предельного ускорения.
5. Способ управления парковкой по п. 2, в котором управляющая информация включает в себя время торможения для остановки от начала замедления до остановки транспортного средства,
когда уровень среды связи оценивается как низкий, время торможения для остановки задается больше, чем тогда, когда уровень среды связи не оценивается как низкий, и
транспортное средство паркуется посредством начала замедления от начала замедления.
6. Способ управления парковкой по п. 1, в котором управление транспортным средством в соответствии с уровнем среды связи включает в себя этапы, на которых:
- вычисляют путь для парковки в соответствии с уровнем среды связи; и
- паркуют транспортное средство на основе упомянутого пути для парковки.
7. Способ управления парковкой по п. 6, в котором, когда уровень среды связи оценивается как низкий,
путь для парковки вычисляется как меньший, чем тогда, когда уровень среды связи не оценивается как низкий, и
транспортное средство управляется на основе пути для парковки.
8. Способ управления парковкой по п. 6, в котором, когда уровень среды связи оценивается как низкий,
вычисляется путь для парковки, в котором позиция поворота для парковки сдвигается в вышележащую сторону, чем тогда, когда уровень среды связи не оценивается как низкий, и
транспортное средство паркуется на основе пути для парковки.
9. Способ управления парковкой по п. 6, содержащий этапы, на которых:
- обнаруживают объект около транспортного средства;
- когда уровень среды связи оценивается как низкий, вычисляют путь для парковки в состоянии, в котором ширина зазора от объекта является расширенной, чем тогда, когда уровень среды связи не оценивается как низкий; и
- паркуют транспортное средство на основе пути для парковки.
10. Способ управления парковкой по п. 6, содержащий этапы, на которых:
- задают множество областей в соответствии с уровнем среды связи;
- вычисляют пути для парковки в упомянутых областях;
- вычисляют весь путь для парковки из путей для парковки областей; и
- паркуют транспортное средство на основе вычисленного пути для парковки.
11. Способ управления парковкой по п. 6, содержащий этапы, на которых:
- задают область в соответствии с уровнем среды связи;
- вычисляют путь для парковки, который не проходит через область, в которой уровень среды связи оценивается как низкий; и
- паркуют транспортное средство на основе вычисленного пути для парковки.
12. Способ управления парковкой по п. 1 или 6, в котором, когда уровень среды связи оценивается как низкий, изменяется частота, на которой передается и принимается рабочая команда.
13. Способ управления парковкой по п. 1 или 6, в котором оценка уровня среды связи около транспортного средства включает в себя этап, на котором оценивают уровень среды связи в соответствии с позиционной взаимосвязью между транспортным средством и терминальным устройством, которое передает рабочую команду.
14. Способ управления парковкой по п. 1 или 6, в котором оценка уровня среды связи около транспортного средства включает в себя этапы, на которых:
- обнаруживают объект около транспортного средства; и
- оценивают уровень среды связи в соответствии с результатом обнаружения объекта.
15. Способ управления парковкой по п. 1 или 6, в котором оценка уровня среды связи около транспортного средства включает в себя этапы, на которых:
- обнаруживают объект около транспортного средства; и
- оценивают уровень среды связи как более низкий по мере того, как расстояние между объектом и терминальным устройством, которое передает рабочую команду, сокращается или расстояние между транспортным средством и объектом сокращается.
16. Способ управления парковкой по п. 1 или 6, в котором оценка уровня среды связи около транспортного средства включает в себя этапы, на которых:
- обращаются к информации среды связи, которая предварительно ассоциирована с позиционной информацией; и
- оценивают уровень среды связи около транспортного средства на основе информации среды связи около транспортного средства.
17. Способ управления парковкой по п. 1 или 6, в котором оценка уровня среды связи около транспортного средства включает в себя этап, на котором оценивают уровень среды связи в соответствии с ситуацией незанятости полосы частот радиоволн связи, используемых около транспортного средства.
18. Способ управления парковкой по п. 1 или 6, в котором оценка уровня среды связи около транспортного средства включает в себя этап, на котором оценивают уровень среды связи на основе состояния прерывания связи около транспортного средства.
19. Способ управления парковкой по п. 18, в котором оценка уровня среды связи около транспортного средства включает в себя этап, на котором задают пороговое значение оценки для оценки состояния прерывания, когда уровень среды связи оценивается как низкий.
20. Оборудование управления парковкой, содержащее:
- устройство ввода, выполненное с возможностью получать рабочую команду, относящуюся к управлению парковкой, извне транспортного средства; и
- устройство управления, выполненное с возможностью управлять транспортным средством с тем, чтобы парковаться в соответствии с рабочей командой,
причем устройство управления выполнено с возможностью:
- оценивать, около транспортного средства, уровень среды связи в отношении связи для передачи рабочей команды, относящейся к управлению парковкой, в транспортное средство;
- вычислять параметр, относящийся к управлению транспортным средством, используемый для выполнения управления парковкой, в соответствии с уровнем среды связи; и
- управлять транспортным средством с тем, чтобы парковаться на основе упомянутого параметра.
| DE 102011051313 A1, 27.12.2012 | |||
| DE 102012022087 A1, 15.05.2014 | |||
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2011 |
|
RU2564268C1 |

