Область техники
Изобретение относится к общей области датчиков, например, таких как датчики температуры, давления, перемещения и т.д.
В частности, оно касается компенсации погрешностей измерения, связанных с выходным полным сопротивлением датчика.
Предпочтительно, но не ограничительно, изобретение находит свое применение в области авиации, где применяют многочисленные датчики (например, на борту летательного аппарата).
Предшествующий уровень техники
На практике, как правило, датчик подключен к цифровому вычислительному устройству, которое предназначено для получения и обработки данных измерения, переданных датчиком, при этом датчик и цифровое вычислительное устройство входят в состав цепи сбора данных.
Однако, как известно, если датчик, сопоставимый с эквивалентным генератором напряжения, последовательно соединенным с сопротивлением источника, подключен к цифровому вычислительному устройству, имеющему определенное входное полное сопротивление, возникает погрешность измерения, если значение соотношения между выходным полным сопротивлением датчика и входным полным сопротивлением вычислительного устройства является достаточно большим. Эта нежелательная погрешность возникает систематически и напрямую зависит от типа датчика и от рассматриваемого вычислительного устройства.
На самом деле, даже если тип датчика строго определен для данного применения, часто от одной детали к другой происходят значительные колебания эквивалентного последовательного полного сопротивления (производственные колебания). В этом случае, как правило, можно компенсировать только половину погрешности, связанной в колебанием эквивалентного последовательного полного сопротивления датчика.
Кроме того, для некоторых типов датчиков (например, потенциометров), колебание полного сопротивления может происходить даже в зависимости от точки измерения этого эквивалентного последовательного полного сопротивления. В этом случае колебание эквивалентного последовательного полного сопротивления, связанное с точкой измерения, приводит к погрешности, меняющейся нелинейно в зависимости от точки измерения. Теоретически эту нелинейную погрешность можно компенсировать, но требуемая компенсация значительно усложняет алгоритм преобразования измерения в физическую величину на уровне цифрового вычислительного устройства, что чаще всего заставляет использовать функции аппроксимации, упрощающие этот алгоритм в ущерб достигаемой точности.
Для некоторых датчиков, погрешность, наводимая этими отклонениями полного сопротивления, может быть значительной вплоть до появления максимальной общей погрешности, которую приходится учитывать в качестве допуска для рассматриваемой цепи сбора данных (например, устанавливаемого в значении 1%). Эта погрешность полного сопротивления добавляется к другим неточностям, которые обычно характерны для цепи сбора данных.
Следовательно, существует потребность в простой, быстрой и эффективной компенсации погрешности измерения для датчика, связанного с цифровым вычислительным устройством, в частности, когда это вычислительное устройство имеет эквивалентное последовательное полное сопротивление, довольно существенное по сравнению с входным полным сопротивлением вычислительного устройства (называемого также «контроллером»).
Кроме того, одно и то же вычислительное устройство может быть предусмотрено для обработки данных от разных типов датчиков, при этом каждый датчик имеет собственное выходное полное сопротивление, которое не известно. Следовательно, компенсацию погрешности нельзя применить заранее, поскольку погрешность будет меняться в зависимости от используемого датчика.
Краткое изложение сущности изобретения
Объектом изобретения является способ коррекции измерения напряжения на выходных контактах датчика, при этом датчик соответствует сборке, содержащей генератор и последовательный резистор, при этом каждый из выходных контактов, соответственно, соединен с нагрузочным резистором, при этом способ содержит следующие этапы:
- когда генератор генерирует определенное напряжение, предварительный этап оценки последовательного сопротивления датчика, при этом предварительный этап включает в себя:
▪ измерение первого напряжения на выходных контактах, когда на каждый нагрузочный резистор подают первое напряжение смещения;
▪ измерение второго напряжения на выходных контактах, когда на нагрузочные резисторы подают второе напряжение смещения, отличное от первого напряжения смещения; и
▪ оценку последовательного сопротивления на основании первого и второго напряжений;
- и этап коррекции, на основании последовательного сопротивления, напряжения, измеренного на выходных контактах датчика, чтобы из него вывести соответствующее напряжение, генерируемое генератором.
Предпочтительно, изобретение позволяет компенсировать погрешность измерения, влияющую на датчик, соединенный с цифровым вычислительным устройством, причем эта погрешность связана с выходным полным сопротивлением датчика.
Согласно первому альтернативному варианту, корректируемым напряжением является первое напряжение.
Согласно второму альтернативному варианту, корректируемым напряжением является напряжение, измеряемое после первого и второго напряжений.
Согласно этой второй альтернативе, первое напряжение смещения можно прикладывать к каждому нагрузочному резистору, когда измеряют предназначенное для коррекции напряжение.
В частном варианте выполнения этап коррекции включает в себя:
- определение компенсирующего значения в зависимости от последовательного сопротивления и от корректируемого напряжения; и
- применение компенсирующего значения к корректируемому напряжению.
С другой стороны, упомянутую оценку можно осуществлять на основании разности между первым и вторым напряжениями.
Согласно частному варианту выполнения, заранее определенное напряжение смещения является таким, что второе напряжение входит в область сбора данных датчика при нормальной работе.
В этом последнем варианте выполнения абсолютное значение разности между первым напряжением смещения и вторым напряжением смещения может быть, по существу, равно максимальному напряжению, которое может генерировать датчик при нормальной работе.
Объектом изобретения является также измерительный прибор, содержащий нагрузочные резисторы, при этом прибор выполнен с возможностью измерения генерируемого напряжения на выходных контактах датчика, когда выходные контакты соединены с нагрузочными резисторами, при этом датчик соответствует сборке, содержащей генератор и последовательный резистор, при этом прибор содержит:
- средства для последовательной подачи первого напряжения смещения и второго напряжения смещения на каждый из нагрузочных резисторов, при этом второе напряжение смещения отличается от первого напряжения смещения;
- средства измерения первого напряжения на выходных контактах, когда генератор генерирует определенное напряжение и когда на нагрузочные резисторы подают первое напряжение смещения;
- средства измерения второго напряжения на выходных контактах, когда генератор генерирует определенное напряжение и когда на нагрузочные резисторы подают второе напряжение смещения;
- средства оценки последовательного сопротивления на основании первого и второго напряжений; и
- средства коррекции, на основании последовательного сопротивления, напряжения, измеряемого на выходных контактах датчика, чтобы вывести из него соответствующее напряжение, генерируемое генератором.
Кроме того, первое напряжение смещения может быть номинальным напряжением для питания нагрузочных резисторов при нормальной работе.
Согласно первому альтернативному варианту, корректируемым напряжением является первое напряжение.
Согласно второму альтернативному варианту, корректируемым напряжением является напряжение, измеряемое после первого и второго напряжений.
В частном варианте выполнения средства коррекции конфигурированы с возможностью определения компенсирующего значения в зависимости от последовательного сопротивления и от корректируемого напряжения и с возможностью применения компенсирующего значения к корректируемому напряжению.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания, представленного в качестве иллюстративного и не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - пример цепи сбора данных в дифференциальном режиме, в ее окружающей среде.
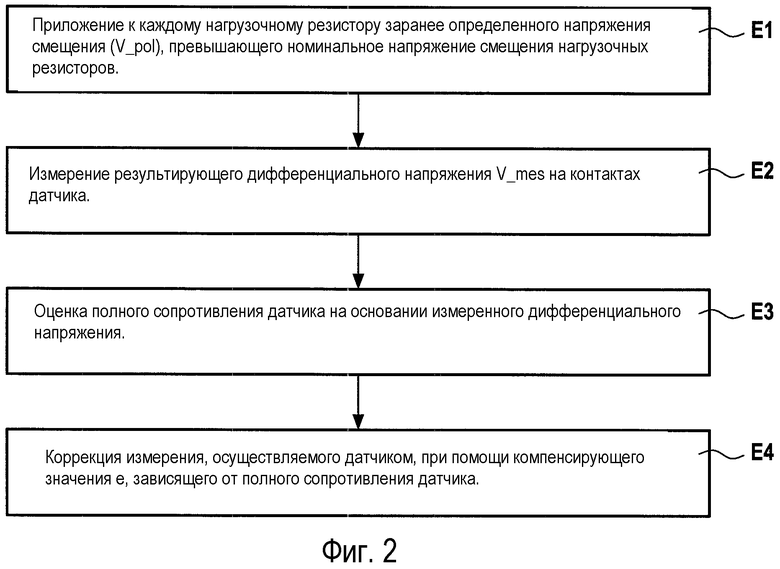
Фиг. 2 - основные этапы способа коррекции, в соответствии с изобретением.
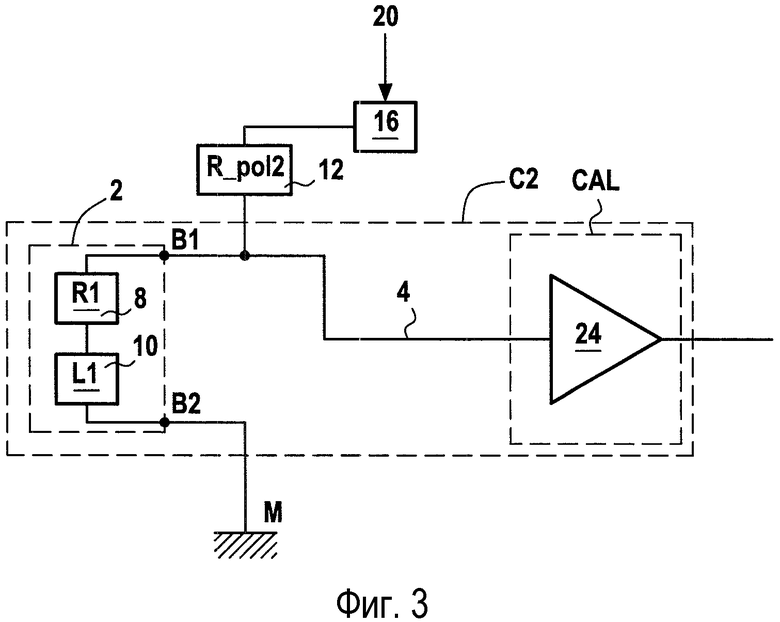
Фиг. 3 - пример цепи сбора данных в общем режиме, в ее окружающей среде.
Описание предпочтительных вариантов выполнения
Как было указано выше, изобретение относится к общей области датчиков и касается компенсации погрешностей измерения, связанных с выходным полным сопротивлением датчика.
Далее со ссылками на фиг. 1 следует описание первого варианта выполнения изобретения. В этом частном варианте изобретение обеспечивает цифровую компенсацию погрешности, возникающей под влиянием последовательного полного сопротивления резистивного датчика. В частности, на фиг. 1 представлен в соответствующей среде пример цепи С1 сбора данных, в которой необходимо корректировать погрешность изменения, возникающую в результате влияния полных сопротивлений датчика и цифрового вычислительного устройства.
В частности, эта цепь С1 сбора данных содержит датчик 2, цифровое вычислительное устройство CAL и две проводящие линии 4 и 6, соединяющие, соответственно, два контакта В1 и В2 датчика 2 с двумя контактами D1 и D2 цифрового вычислительного устройства CAL.
Датчик 2 соответствует эквивалентному генератору 10 напряжения, последовательно соединенному с резистором 8, значение сопротивления которого обозначается Rcapt.
Значение Rcapt зависит от рассматриваемого датчика и указано производителем. В варианте его можно измерить в ходе предварительного этапа.
На практике, когда датчик 2 находится в режиме работы, эквивалентный генератор 10 напряжения генерирует эквивалентное напряжение Vcapt, характеризующее соответствующую физическую величину (температуру, давление и т.д.). Вместе с тем это эквивалентное напряжение Vcapt подвержено влиянию последовательного сопротивления Rcapt датчика 10, поэтому выходное напряжение Vmes, которое измеряют на выходных контактах В1 и В2, отличается от эквивалентного напряжения Vcapt, реально генерируемого генератором 10. Иначе говоря, выходное напряжение Vmes на выходных контактах В1 и В2 зависит от погрешности, возникающей под влиянием выходного сопротивления датчика 2. Поэтому необходимо корректировать выходное напряжение Vmes, измеряемое на контактах В1 и В2 датчика 2, чтобы определить соответствующее эквивалентное напряжение Vcap, которое реально генерирует генератор 10.
В представленном примере датчик 2 является резистивным датчиком (например, датчиком давления). Например, речь идет об измерительном мосте. Разумеется, представленный пример ни в коем случае не является ограничительным. В частности, датчик 2 может быть индуктивным и/или емкостным датчиком, позволяющим определять другие переменные, такие как температура, давление, скорость и т.д. Таким образом, в последовательное полное сопротивление датчика 2 может входить индуктивный элемент, не показанный на фигуре.
Рассматриваемый вариант выполнения осуществляют в дифференциальном режиме. Однако изобретение можно также применять в общем режиме, как будет описано ниже со ссылками на фиг. 3.
С другой стороны, кроме соединения с контактом D1 (соответственно D2) цифрового вычислительного устройства CAL, контакт В1 (соответственно В2) датчика 2 можно также соединить с так называемым нагрузочным резистором 12 (соответственно 14), известным специалисту в данной области. Нагрузочный резистор 12 соответствует верхнему уровню потенциала (на английском языке “pull-up resistor”), тогда как нагрузочный резистор 14 соответствует нижнему уровню потенциала (на английском языке “pull-down resistor”). Значение сопротивлений нагрузочных резисторов 12 и 14, соответственно, обозначается Rpol1 и Rpol2.
В рассматриваемом примере нагрузочные резисторы 12 и 14, соответственно, соединены с цифро-аналоговыми преобразователями 16 и 18, причем последние выполнены с возможностью приложения соответствующих напряжений смещения. В свою очередь, эти цифро-аналоговые преобразователи могут управляться различными компонентами. В этом примере цифро-аналоговыми преобразователями 16 и 18 управляет цифровой блок 20 электронной системы.
Кроме того, рассматриваемое в данном случае цифровое вычислительное устройство CAL дополнительно содержит фильтр 22 общего режима/дифференциального режима, за которым следует усилитель 24, позволяющий улучшить соотношение сигнал/шум измерительного сигнала, выдаваемого датчиком 2. Элементы, входящие в состав цифрового вычислительного устройства, а также принцип их работы известны специалисту, и их подробное описание опускается.
Далее со ссылками на фиг. 2 следует описание основных этапов (Е1 и Е2) способа коррекции по изобретению, применяемого для цепи С1 сбора данных, показанной на фиг. 1.
В этом варианте выполнения способ коррекции применяют, чтобы корректировать выходное напряжение, измеряемое на выходных контактах В1 и В2 датчика 2.
Для этого сначала осуществляют предварительный этап Е1 оценки последовательного полного сопротивления Rcapt измерительного датчика 2 (этап Е1). На этом этапе генератор 10 генерирует определенное напряжение, обозначаемое Vcapt. Этап Е1 включает в себя реализацию подэтапов Е11, Е12 и Е13.
В частности, во время этапа Е1 производят измерение первого выходного напряжения Vmes1, генерируемого датчиком 2, на выходных контактах В1 и В2 (подэтап Е11). Это первое напряжение измеряет вычислительное устройство 22, когда на нагрузочные резисторы 12 и 14 подают первое напряжение смещения Vpol_1. Это напряжение Vpol_1 является дифференциальным напряжением, прикладываемым цифро-аналоговыми преобразователями 16 и 18.
В описанном варианте выполнения первое напряжение смещения Vpol_1 является номинальным напряжением смещения нагрузочных резисторов 12 и 14. Вместе с тем, понятно, что напряжение смещения Vpol_1 может отличаться от номинального напряжения смещения.
В данном документе под «номинальным напряжением смещения» следует понимать напряжение смещения, обычно подаваемое на контакты нагрузочных резисторов 12 и 14, чтобы обеспечивать нормальную работу датчика 2. Естественно, это напряжение зависит от характеристик датчика 2, и его определение известно специалисту.
Затем производят измерение второго выходного напряжения Vmes2, генерируемого датчиком 2, на контактах В1 и В2 (подэтап Е12). Это второе напряжение Vmes2 измеряет вычислительное устройство 22, когда на нагрузочные резисторы 12 и 14 подают второе напряжение смещения Vpol_2, отличное от первого напряжения смещения Vpol_1. Это напряжение Vpol_2 тоже является дифференциальным напряжением, прикладываемым цифро-аналоговыми преобразователями 16 и 18 к нагрузочным резисторам.
Понятно, что в зависимости от типа используемого датчика или от схемы контроллера специалист может принять решение о подаче положительного или отрицательного дифференциального напряжения смещения на нагрузочные резисторы.
Как было указано выше, необходимо, чтобы напряжение смещения Vpol_2 отличалось от номинального напряжения смещения Vpol_1, что позволяет оценить последовательное сопротивление Rcapt.
На практике, напряжение смещения Vpol_2 выбирают таким образом, чтобы второе напряжение Vmes2 находилось в нормальном диапазоне сбора данных датчика 2, то есть в интервале выходного напряжения датчика 2 при нормальной работе.
При условии соблюдения вышеуказанного требования заявитель отметил, что, чем больше разность (по абсолютной величине) между Vpol_1 и Vpol_2, тем точнее определение последовательного сопротивления датчика. Действительно, при нормальной работе датчика 2 напряжение смещения Vpol_1 является достаточно низким, чтобы не мешать измерению выходного напряжения датчика 2. С другой стороны, чтобы точно оценить последовательное полное сопротивление Rcapt датчика 2, напряжение смещения Vpol_2 выбирают достаточно высоким или достаточно отличающимся от напряжения смещения Vpol_1, чтобы значительно изменять выходное напряжение по сравнению с нормальной работой. Таким образом, можно с высокой точностью оценивать полное сопротивлении датчика 2.
Обычно Vpol_2 выбирают таким образом, чтобы абсолютное значение разности между номинальным напряжением смещения Vpol_1 и заранее определенным напряжением смещения Vpol_2 было по существу равно максимальному напряжению Vmax, которое необходимо получить на выходных контактах В1 и В2 при нормальной работе датчика 2. Таким образом:

В частном варианте выполнения:

Таким образом, можно минимизировать разность ΔVmes между напряжениями Vmes1 и Vmes2, измеренными, соответственно, во время подэтапов Е11 и Е12 на выходных контактах В1 и В2 датчика 2. Меньшая разность ΔVmes является более предпочтительной, так как она позволяет производить измерения напряжения на контактах В1 и В2 датчика, не меняя коэффициента усиления цепи С1 сбора данных. Если напряжения Vmes1 и Vmes2 имеют близкие значения, погрешность, связанная с цепью обработки (коэффициент усиления и смещение цепи), оказывается значительно минимизированной во время этапа Е1.
В частном варианте выполнения напряжение смещения Vpol_2 устанавливают таким образом, чтобы оно превышало или было равно по абсолютной величине номинальному напряжению смещения Vpol_1.
После осуществления подэтапов Е11 и Е12 оценивают последовательное сопротивление Rcapt датчика 2 в зависимости от напряжений Vmes1 и Vmes2, полученных соответственно на подэтапах Е11 и Е12.
В представленном случае напряжения Vmes1 и Vmes2 можно определять при помощи следующих уравнений (1) и (2):
Уравнение (1):
 .
.
Уравнение (2):
 .
.
Из уравнений (1) и (2) можно получить следующее уравнение:
 ,
,
что позволяет выразить последовательное сопротивление Rcapt следующим уравнением (3):
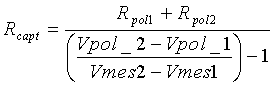 .
.
Уравнение (3) позволяет получить точное значение последовательного сопротивления Rcapt.
Кроме того, заявитель определил альтернативный способ оценки последовательного сопротивления Rcapt на основании Vmes1 и Vmes2. Нижеследующее уравнение (4) позволяет получить приближенное значение Rcapt, когда последнее является низким по сравнению с сопротивлениями смещения Rpol1 и Rpol2:
 .
.
Таким образом, получают следующее уравнение:
 .
.
В приближении, согласно уравнению (4), члены второго порядка исключены. Конечно, этот альтернативный способ вычисления является менее точным, чем уравнение (3), но более простым в применении для регулирующего вычислительного устройства, такого как вычислительное устройство 22.
В настоящем случае предположим, например, что:
▪ Rpol1=Rpol2=1MΩ
▪ Vpol_1=-200мВ
▪ Vpol_2=+200мВ
Кроме того, предположим, что измерения напряжения на подэтапах Е11 и Е12, соответственно, привели к результатам:
▪ Vmes1=99,7 мВ
▪ Vmes2=100,1 мВ
Таким образом, получаем:
▪ Rcapt=2 кОм при помощи уравнения (3), и
▪ Rcapt=1,998 кОм при помощи уравнения (4).
Уравнение (3) позволяет определить точное значение Rcapt, тогда как уравнение (4) дает Rcapt с приближением. Следовательно, можно определить значение погрешности оценки (обозначаемое ε), вводимое в уравнение (4):
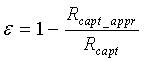 ,
,
где Rcapt_appr является значением последовательного сопротивления резистора 8, полученным при помощи уравнения (4). В описанном примере ε=0,1%.
Кроме того, в этом примере предполагается, что напряжение Vcapt, которое реально генерирует генератор 10 во время измерений на подэтапах Е11 и Е12, является таким, что: Vcapt=100 мВ. Напряжение Vmes1, измеренное на Е11, имеет, таким образом, погрешность δV1=Vmes1-Vcapt=-299,7 мкВ.
Кроме того, следует отметить, что в настоящем случае разность ΔVmes напряжений, измеренных на подэтапах Е11 и Е12 на контактах В1 и В2 датчика 2, является такой, что:
ΔVmes=Vmes2-Vmes1=399,6 мкВ.
Как было указано выше, эта разность является достаточно малой, чтобы пренебречь влиянием колебаний коэффициента усиления цепи сбора данных во время измерений на подэтапах Е11 и Е12.
После завершения предварительного этапа оценки Е1 осуществляют этап коррекции Е2 выходного напряжения на контактах В1 и В2 датчика 2. Этот этап коррекции позволяет вывести, на основании последовательного сопротивления Rcapt, полученного на этапе Е1, соответствующее напряжение Vcapt, действительно генерируемое генератором 10 датчика 2. В рамках изобретения можно предусмотреть две альтернативы.
Согласно первой альтернативе, этап коррекции Е2 позволяет корректировать напряжение Vmes1 (полученное на подэтапе Е11) в зависимости от ранее определенного значения Rcapt. Для этого на основании Rcapt и Vmes1 определяют напряжение Vcapt1, генерированное генератором 10 во время измерения Е11.
Напряжение Vcapt1 можно определить точно, вставив в уравнение (1) значение Rcapt, полученное на этапе Е1 при помощи уравнения (3) или (4).
Альтернативно, Vcapt1 можно вычислить при помощи следующего приближенного уравнения (5):
 .
.
Затем на основании полученного таким образом значения Vcapt1 определяют (Е2) компенсирующее значение Vcomp1, которое следует добавить к напряжению Vmes1 для получения соответствующего напряжения Vcapt1. Иначе говоря, Vcomp1 получают при помощи следующего уравнения (6):
Vcomp1=Vcapt1-Vmes1.
Комбинируя, например, уравнения (5) и (60), определяют Vcomp1 по следующему уравнению (7):
 .
.
В представленном примере из уравнения (7) получают следующий результат: Vcomp1=299,401 мкВ. Можно отметить, что это компенсирующее значение Vcomp1 очень близко (по абсолютной величине) к определенной выше погрешности δV1 (δV1=-299,7 мкВ).
Согласно второй альтернативе, этап коррекции Е2 позволяет корректировать напряжение, отличное от напряжения Vmes1 (или Vmes2), а именно напряжение Vmes3, измеряемое в дальнейшем на выходных контактах В1 и В2 датчика 2.
Для этого этап Е2 включает в себя измерение напряжения Vmes3 на выходных контактах датчика 2. В этом примере напряжение смещения Vpol_3, прикладываемое к нагрузочным резисторам 12 и 14 во время измерения Vmes3, является номинальным напряжением нагрузочных резисторов. Однако можно предусмотреть, чтобы оно таким не являлось.
Затем используют уравнение (7), чтобы на основании Vmes3 и последовательного сопротивления Rcapt, полученного на этапе Е1, определить компенсирующее напряжение Vcomp3:
Vcomp3=Vcapt3-Vmes3,
где Vcapt3 является соответствующим напряжением, генерированным генератором 10 во время измерения Vmes3. Таким образом, получаем:
 .
.
На основании Vcomp3 можно корректировать напряжение Vmes3, чтобы из него вывести соответствующее напряжение Vcapt3, генерируемое генератором 10 датчика 2.
Таким образом, согласно этой второй альтернативе, нет необходимости определять значение эквивалентного напряжения Vcapt1, выдаваемого генератором 10, на подэтапе Е11. Измерение напряжения Vmes1 (и Vmes2) служит только для определения последовательного сопротивления Rcapt датчика 2. Затем, на основании этого значения Rcapt можно корректировать любое напряжение, измеряемое на выходных контактах В1 и В2 датчика. Это любое напряжение можно измерять до или после предварительного этапа Е1 оценки последовательного полного сопротивления Rcapt.
Изобретение позволяет также корректировать при помощи значения Rcapt множество напряжений, последовательно измеряемых на выходных контактах В1 и В2 датчика 2.
Кроме того, следует отметить, что заявленный способ можно применять как для датчиков, предназначенных для приема постоянного напряжения смещения (датчик постоянного типа), так и для датчиков, предназначенных для приема переменного напряжения смещения (датчик переменного типа).
Если датчик 2 является датчиком постоянного типа, прикладываемое напряжение смещения V_pol тоже является постоянным. Если же датчик 2 является датчиком переменного типа, к нагрузочным резисторам 12 и 14 прикладывают переменное напряжение смещения V_pol, например, на полезной частоте f0 рассматриваемого датчика 2. Таким образом, полное сопротивление датчика 2 выводят на его полезной частоте f0.
В данном случае под полезной частотой f0 датчика следует понимать его обычную рабочую частоту, которую заранее определяет конструктор датчика. Следует также отметить, что некоторые типы индуктивных датчиков, таких, например, как акустический датчик, характеризуются полезным частотным диапазоном. В этом случае частоту изменения смещения предпочтительно выбирают таким образом, чтобы достичь максимума чувствительности для комплекса из датчика, провода и контроллера (вычислительного устройства).
Объектом изобретения является также измерительный прибор, выполненный с возможностью применения заявленного способа коррекции. В варианте выполнения, представленном на фиг. 1, измерительный прибор содержит:
- вычислительное устройство 22, выполненное с возможностью измерения выходного напряжения Vmes на выходных контактах В1 и В2 датчика 2,
- нагрузочные резисторы 12 и 14, соединенные с выходными контактами В1 и В2 датчика 2, и
- преобразователи 16 и 18, выполненные с возможностью подачи разных напряжений смещения на нагрузочные резисторы 12 и 14.
С другой стороны, на фиг. 3 представлен другой пример выполнения, в котором цепь сбора данных (обозначенная С2) смонтирована для работы в общем режиме.
В этом примере цепь сбора данных С2 содержит датчик 2 и цифровое вычислительное устройство CAL. По сравнению с цепью сбора данных С1, показанной на фиг. 1, датчик 2 соединен с вычислительным устройством CAL только одним проводником 4.
В частности, цифровое вычислительное устройство CAL содержит усилитель 24. Контакт В2 датчика 2 соединен с массой М, тогда как другой контакт В1 соединен с нагрузочным резистором 12 через проводник 4. Кроме того, нагрузочный резистор 12 соответствует верхнему уровню потенциала. Разумеется, этот пример не является ограничительным. Например, датчик 2 можно соединить только с одним нагрузочным резистором, причем соответствующим нижнему уровню потенциала.
Заявленный способ коррекции применяют для цепи сбора данных С2 так же, как и для цепи С1, при этом измерение датчика 2 на этот раз зависит от напряжения на контакте В1 по отношению к массе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ, ТРАНСПОРТНОЕ СРЕДСТВО, ОСНАЩЕННОЕ ЕЙ, СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ | 2007 |
|
RU2403155C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ДЕТЕКТИРОВАНИЯ ИНФРАКРАСНОГО ИЗЛУЧЕНИЯ С ПОМОЩЬЮ МАТРИЦЫ РЕЗИСТИВНЫХ БОЛОМЕТРОВ | 2009 |
|
RU2518348C2 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ | 2014 |
|
RU2549255C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДАВЛЕНИЯ ГАЗА | 2016 |
|
RU2665753C2 |
| КОРРЕКЦИЯ МОДЕЛИ В ГАЗОТУРБИННОМ ДВИГАТЕЛЕ | 2020 |
|
RU2821437C2 |
| ЦИФРОВОЙ СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2344384C1 |
| ВЫЯВЛЕНИЕ И АДАПТАЦИЯ К ПРЕРЫВИСТОМУ РАЗМЫКАНИЮ ЦЕПЕЙ НА ДАТЧИКЕ АВИАЦИОННОГО ТУРБИННОГО ДВИГАТЕЛЯ | 2018 |
|
RU2784316C2 |
| СПОСОБ ОЦЕНКИ НАВИГАЦИОННОГО СОСТОЯНИЯ В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВОЗМОЖНОСТИ НАБЛЮДЕНИЯ | 2015 |
|
RU2701194C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ИМПЕДАНСА | 2021 |
|
RU2777309C1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399156C1 |
Изобретение относится к общей области датчиков, например, таких как датчики температуры, давления, перемещения и т.д. В частности, оно касается компенсации погрешностей измерения, связанных с выходным полным сопротивлением датчика. Способ коррекции измерения напряжения на выходных контактах датчика и измерительный прибор для реализации способа, при котором упомянутый датчик содержит генератор (10) и последовательный резистор (8), при этом каждый из упомянутых выходных контактов (B1, В2) соединен с нагрузочным резистором (12) и нагрузочным резистором (14), при этом способ содержит следующие этапы: предварительный этап оценки последовательного сопротивления (Rcapt) датчика, причем этот этап включает в себя измерение первого (соответственно, второго) напряжения на выходных контактах, когда на каждый нагрузочный резистор подают первое (соответственно, второе) напряжение смещения, и оценку последовательного сопротивления на основании первого и второго напряжений, и этап коррекции, на основании последовательного сопротивления, напряжения, измеренного на выходных контактах датчика, чтобы из него вывести соответствующее напряжение, генерируемое генератором. Технический результат заключается в возможности компенсировать погрешность измерения, влияющую на датчик, соединенный с цифровым вычислительным устройством, причем эта погрешность связана с выходным полным сопротивлением датчика. 2 н. и 11 з.п. ф-лы, 3 ил.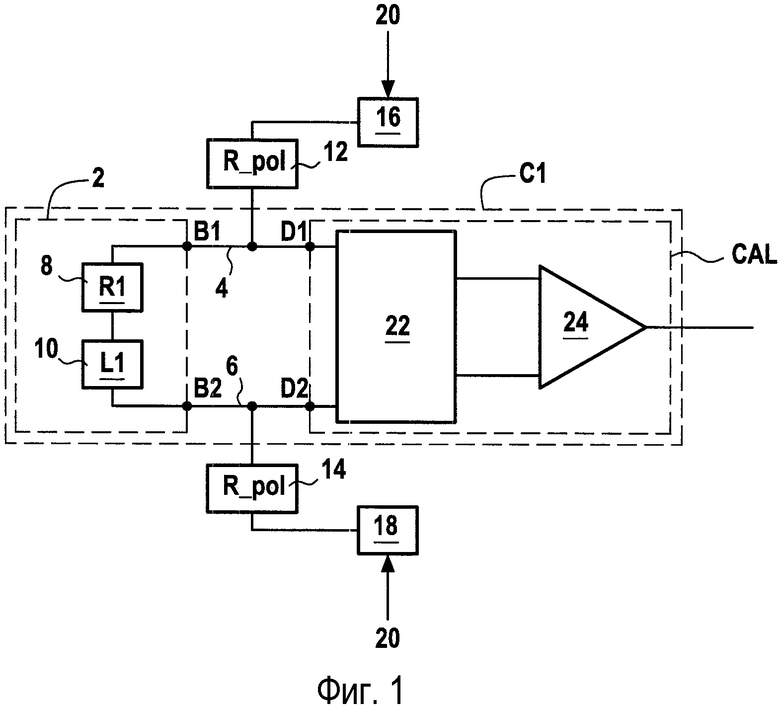
1. Способ коррекции измерения напряжения на выходном контакте (В1) и выходном контакте (В2) датчика (2), при этом упомянутый датчик содержит генератор (10) и последовательный резистор (8), при этом каждый из упомянутых выходных контактов (B1, В2) соединен с нагрузочным резистором (12) и нагрузочным резистором (14), при этом способ содержит следующие этапы:
- предварительный этап (Е1) оценки последовательного сопротивления (Rcapt) датчика, когда генератор генерирует определенное напряжение (Vcapt1), при этом упомянутый предварительный этап включает в себя этапы, на которых:
- измеряют (Е11) первое напряжение на упомянутых выходных контактах, когда на каждый нагрузочный резистор подают первое напряжение смещения (Vpol_1);
- измеряют (Е12) второе напряжение на упомянутых выходных контактах, когда на упомянутые нагрузочные резисторы подают второе напряжение смещения (Vpol_2), отличное от первого напряжения смещения; и
- оценивают (Е13) упомянутое последовательное сопротивление на основании упомянутых первого и второго напряжений;
- и этап (Е2) коррекции, на основании упомянутого оцененного последовательного сопротивления, напряжения, измеренного на выходных контактах датчика, чтобы привести его в соответствие с определенным напряжением, генерируемым упомянутым генератором.
2. Способ коррекции по п. 1, в котором упомянутое корректируемое напряжение соответствует первому напряжению.
3. Способ коррекции по п. 1, в котором упомянутое корректируемое напряжение измеряют после указанных первого и второго напряжений.
4. Способ коррекции по п. 3, в котором первое напряжение смещения прикладывают к каждому нагрузочному резистору, когда измеряют упомянутое корректируемое напряжение.
5. Способ коррекции по п. 1, в котором этап коррекции включает в себя этапы, на которых:
- определяют компенсирующее значение на основе оцененного последовательного сопротивления и упомянутого корректируемого напряжения; и
- применяют упомянутое компенсирующее значение к упомянутому корректируемому напряжению.
6. Способ коррекции по п. 1, в котором упомянутая оценка основана на вычислении разности между первым и вторым напряжениями.
7. Способ коррекции по п. 1, в котором второе напряжение смещения является таким, что второе напряжение входит в область сбора данных датчика при нормальной работе.
8. Способ коррекции по п. 7, в котором абсолютное значение разности между первым напряжением смещения и вторым напряжением смещения, по существу, равно максимальному напряжению, генерируемому генератором при нормальной работе.
9. Измерительный прибор, содержащий: нагрузочный резистор (12) и нагрузочный резистор (14), при этом упомянутый прибор выполнен с возможностью измерения генерируемого напряжения (Vmes) на выходном контакте (В1) и выходном контакте (В2) датчика (2), когда упомянутые выходные контакты соответственно соединены с упомянутыми нагрузочными резисторами, при этом упомянутый датчик содержит генератор (10) и последовательный резистор (8), при этом упомянутый прибор содержит вычислительное устройство для:
последовательной подачи первого напряжения смещения (Vpol_1) и второго напряжения смещения (Vpol_2) на каждый из упомянутых нагрузочных резисторов, при этом упомянутое второе напряжение смещения отличается от первого напряжения смещения;
измерения первого напряжения на упомянутых выходных контактах, когда генератор генерирует определенное напряжение и когда на упомянутые нагрузочные резисторы подают первое напряжение смещения;
измерения второго напряжения на упомянутых выходных контактах, когда генератор генерирует определенное напряжение и когда на упомянутые нагрузочные резисторы подают второе напряжение смещения;
оценки упомянутого последовательного сопротивления на основании упомянутых первого и второго напряжений; и
коррекции, на основании упомянутого оцененного последовательного сопротивления, напряжения, измеряемого на выходных контактах датчика, чтобы привести его в соответствие с определенным напряжением, генерируемым упомянутым генератором.
10. Измерительный прибор по п. 9, в котором упомянутое первое напряжение смещения является номинальным напряжением для питания нагрузочных резисторов при нормальной работе.
11. Измерительный прибор по п. 9, в котором упомянутое корректируемое напряжение соответствует первому напряжению.
12. Измерительный прибор по п. 9, в котором упомянутое корректируемое напряжение измеряют после указанных первого и второго напряжений.
13. Измерительный прибор по п. 9, в котором вычислительное устройство выполнено с возможностью определения компенсирующего значения на основе оцененного последовательного сопротивления и упомянутого корректируемого напряжения и с возможностью применения упомянутого компенсирующего значения к упомянутому корректируемому напряжению.
| US 20030147451 A1 07.08.2003 | |||
| US 4535283 A1 13.08.1985 | |||
| US 4000643 A1 04.01.1977 | |||
| US 4419620 A1 06.12.1983 | |||
| Способ определения величины нелинейности характеристики акселерометров с обратным преобразователем | 1988 |
|
SU1569728A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕЛИНЕЙНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА С КОРРЕКТИРУЮЩИМИ ЗВЕНЬЯМИ | 1988 |
|
RU1579231C |

