Область техники
Изобретение относится к системе управления дверью с обнаружением препятствий.
Введение
Когда дверь открывается или закрывается, существует возможность, что препятствие, образованное предметами или людьми, может случайно оказаться на ее пути. Необходимо защитить и дверь, и эти препятствия посредством системы управления, оборудованной функциональным узлом безопасности, целью которого является возможность справляться со случайным присутствием препятствий, в частности, посредством остановки двери при ее перемещении, когда встречается препятствие, и перемещения ее назад от препятствия, с тем чтобы можно было его удалить. Такое устройство безопасности должно реагировать быстро и надежно, поскольку запоздалая реакция или отсутствие реакции может привести, во-первых, к опасному повреждению или опрокидыванию препятствия и, во-вторых, к повреждению двери.
Более того, такая система управления дверью должна обеспечивать возможность продолжить первоначальное движение двери автоматически и настолько быстро, насколько возможно, как только препятствие устранено. Данное требование продиктовано, в частности, такими соображениями, как энергосбережение, защита от внешних воздействий, таких как ветер, дождь и воры, поддержка регулируемой атмосферы (например, охлаждаемых хранилищ, чистых комнат и т.п.) и т.д. Дополнительно, вышеуказанная система управления дверью должна, в этих случаях, защищать и дверь, и препятствие во избежание их повреждения.
Уровень техники
Ранее были известны такие системы с обнаружением препятствий, которые предлагают некоторый уровень защиты во время эксплуатации дверей и, в особенности, гибких быстродействующих дверей посредством обнаружения препятствий, которые могут находиться на пути движения двери.
Некоторые системы обнаружения препятствия являются бесконтактными, то есть они позволяют обнаруживать препятствие до столкновения. Например, в патенте US 7 034 682 В2 раскрыт датчик близости, снабженный антенной, который запускает команду остановки и меняет направление закрытия вертикальной двери на обратное, когда магнитное поле, создаваемое антенной, является возмущенным из-за близкого предмета. Такой системе не хватает точности, которая обусловлена тем, что магнитное поле может излучаться извне от закрываемой плоскости, что влечет ложные аварийные срабатывания из-за предметов, расположенных близко к двери, но не под ней.
Препятствия могут быть также обнаружены с использованием сложной компьютерной системы, одна из которых раскрыта в патенте US 5 198 974 А, в которой изменение скорости шкива двери записывают и сравнивают с контрольной кривой скорости, сохраненной в памяти, для определения, есть ли препятствие.
Другие системы обнаружения могут содержать детекторы контакта, раскрытые, например, в US 2007/0261305 А1. Обнаружение контакта во время фазы закрытия двери генерирует сигнал, обычно электрический, который вызывает приостановление фазы закрытия двери.
Каждый из документов US, 7 034 682 В2, US 6 989 767 В2, US 5 198 974 А и US 2007/0261305 А1 имеет отношение к системам безопасности для дверей, в которых, как только обнаружено препятствие, мотор останавливается, меняет направление вращения на обратное для полного открывания двери и останавливается окончательно, когда дверь полностью открыта. Дверь может быть закрыта только ручным вмешательством.
Документ US 4 452 292 имеет отношение к системе управления дверью, в которой, после обнаружения препятствия во время закрытия, мотор останавливается и меняет направление вращения на обратное, чтобы позволить устранить препятствие, и затем возобновляет вращение в направлении закрытия. Описаны разные циклы для случаев, когда препятствие не может быть устранено по прошествии времени. Однако в циклах, описанных в данном документе, дверь в каждом случае закрывается с постоянной скоростью, что, во-первых, если скорость является высокой, не особо защищает ни дверь, ни препятствие и, во-вторых, если скорость низкая, увеличивает время закрытия до неприемлемо большого.
Таким образом, остается необходимость в простой и надежной системе закрытия двери, способной, после повторных столкновений с препятствием, продолжить изначальное движение автоматически и настолько быстро, насколько возможно, как только препятствие устранено, и в тоже время, защищающей в этом случае и дверь, и препятствие.
Раскрытие изобретения
Первой целью изобретения является обеспечение простой и надежной системы закрытия двери, способной, после повторных столкновений с препятствием, продолжить изначальное движение автоматически и настолько быстро, насколько возможно, как только препятствие устранено, и в то же время, защищающей в этом случае и дверь, и препятствие.
Примерные варианты осуществления настоящего изобретения содержат, в частности, систему для управления дверью, предназначенную для закрытия проемов в сооружении или любых типов проемов, позволяющей движение из начальной контрольной позиции Pi по пути первого направления со скоростью v1 до достижения конечной контрольной позиции Pf, и такая система содержит функцию безопасности, содержащую средство для выполнения следующих шагов в случае столкновения с препятствием, преграждающим путь двери в первом направлении:
(a) обнаружение столкновения, остановку мотора, сохранение позиции Pimpact столкновения, и далее
(b) обратное перемещение двери движением ее во втором направлении, противоположном первому, со скоростью v2 до достижения позиции Pwaiting ожидания, заданной так, чтобы оставить достаточно пространства для устранения препятствия;
(c) после истечения времени Δtwaiting ожидания в позиции Pwaiting ожидания, движение двери в первом направлении со скоростью v1 до достижения заданной позиции P3, расположенной до позиции Pimpact столкновения, и в этой точке скорость движения в первом направлении уменьшается до скорости v3, где 0<v3<v1;
(d) если дверь, движущаяся в первом направлении с уменьшенной скоростью v3, более не обнаруживает препятствие в позиции Pimpact, увеличение скорости движения в первом направлении до значения vl, пока дверь не достигнет конечной контрольной позиции Pf;
(e) с другой стороны, если при движении двери в первом направлении с уменьшенной скоростью v3 снова обнаружено препятствие в той же самой позиции Pimpact, цикл, определенный шагами (a)-(c), повторяется, и шаг (d) выполняется, если удовлетворены описанные в нем условия;
(f) если после заданного числа N повторений вышеуказанного цикла препятствие все еще обнаружено, дверь движется во втором направлении со скоростью v2 и останавливается в заданной позиции Pstop остановки до ручного перезапуска системы управления.
Преимущество изобретения состоит в том, что дверь продолжает работу несмотря на присутствие на своем пути препятствия в позиции Pimpact и позволяет продолжить начальное движение автоматически, как только препятствие устранено, посредством использования простой конструкции, согласующей оба эксплуатационных требования, то есть достаточно высокую нормальную скорость v1 движения двери, и, с учетом предотвращения повреждения как двери, так и препятствия, уменьшение этой скорости до v3<v1 вблизи позиции Pimpact столкновения для уменьшения энергии потенциального столкновения (энергия ос v2), если препятствие не было устранено во время второго прохода двери через позицию Pimpact. Число n проходов двери через позицию Pimpact, определяющее n циклов, ограничено максимальным значением N для ограничения числа столкновений с уменьшенной скоростью v3 в случае длительного технического обслуживания препятствия на пути двери, что позволяет защитить его. В этом же случае уменьшаются энергозатраты. В случае столкновения на другой высоте значение числа n циклов переустанавливают в 1.
Краткое описание чертежей
Эти объекты, так же как и другие объекты изобретения, будут пояснены в подробном описании частных вариантов осуществления изобретения, и ссылки будут даны на чертежи, где
фиг.1 - блок-схема, иллюстрирующая пример работы системы согласно настоящему изобретению;
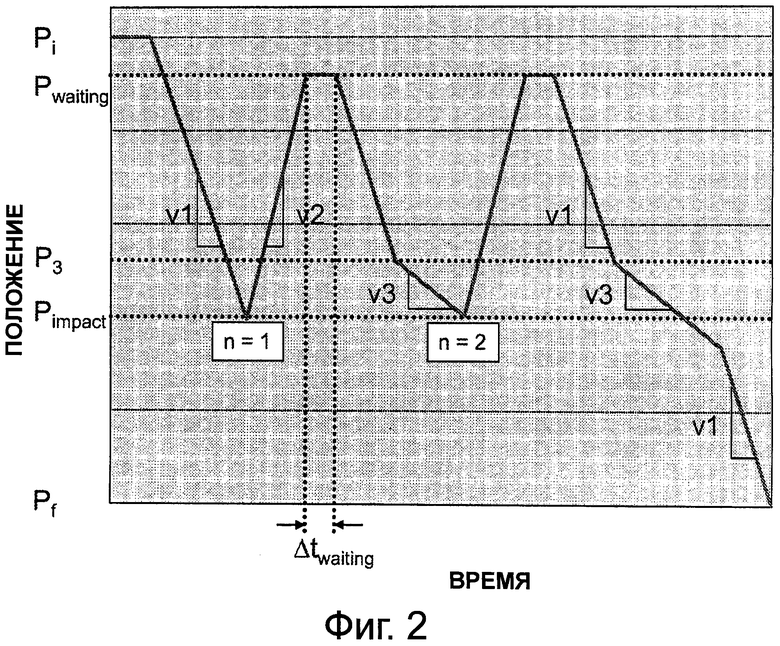
фиг.2 - графическое представление управления функцией безопасности, запускаемой при столкновении двери во время ее движения согласно варианту осуществления системы управления по настоящему изобретению;
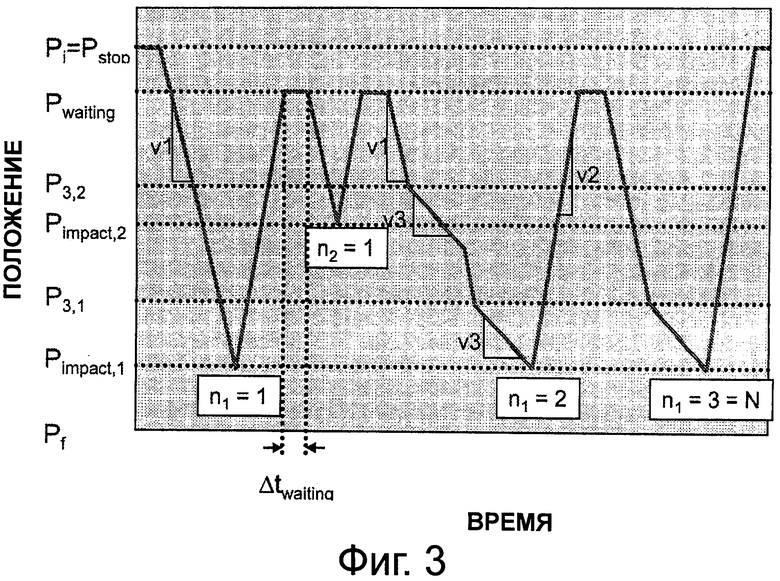
фиг.3 - графическое представление управления функцией безопасности, запускаемой при двух столкновениях двери во время движения в разных позициях пути ее следования;
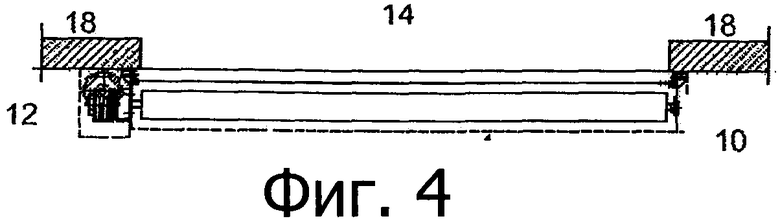
фиг.4 - вид сверху примерной системы согласно одному варианту осуществления настоящего изобретения;
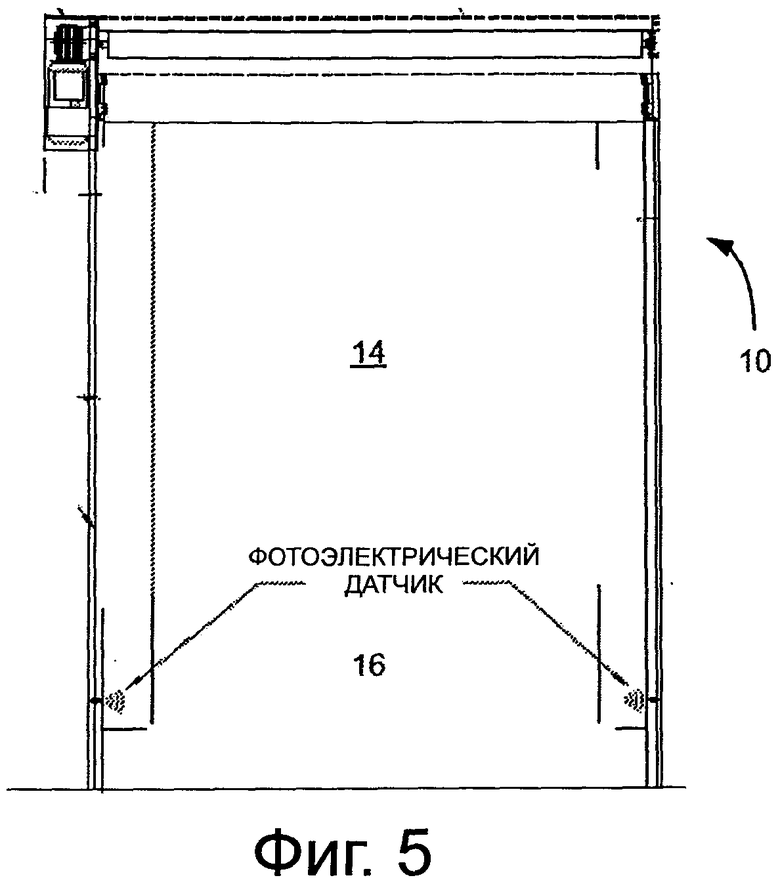
фиг.5 - вид спереди примерной системы, показанной на фиг.4;
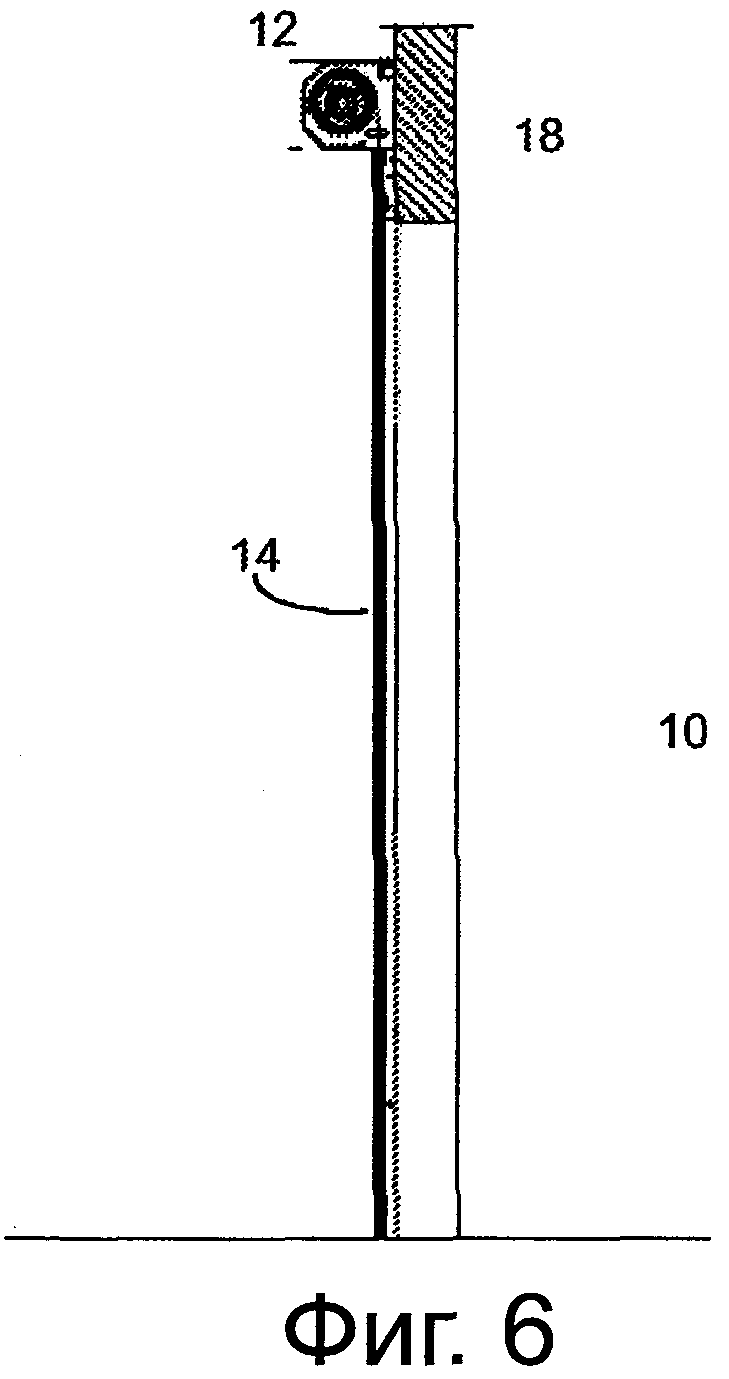
фиг.6 - вид сбоку примерной системы, показанной на фиг.4 и 5.
Соответствующие ссылочные номера означают соответствующие части на нескольких показанных видах. Несмотря на то, что чертежи представляют варианты осуществления настоящего изобретения, чертежи не обязательно показаны в масштабе, и некоторые признаки могут быть показаны увеличенными для лучшей иллюстрации и объяснения настоящего изобретения. Блок-схемы и графики также являются характерными в целом, и фактические варианты осуществления изобретения могут включать дополнительные признаки или этапы, не показанные на чертежах. Набор пояснительных примеров, приведенный здесь, иллюстрирует вариант осуществления изобретения, в одной форме, и такие пояснительные примеры не должны быть истолкованы, как ограничивающие каким-либо образом объем изобретения.
Подробное описание частных вариантов осуществления
Настоящее изобретение применимо к любому типу двери, определение которой соответствует общему смыслу, содержащей любую конструкцию для реверсивного закрытия проема или дверного проема. Дверь согласно настоящему изобретению может быть жесткой или, наоборот, гибкой, и ее движение, позволяющее реверсивное закрытие прохода, может быть линейным или угловым. Дверь может быть установлена вертикально, но также быть наклонной или даже горизонтальной в случае горизонтальных проемов.
В контексте настоящего изобретения первое направление определяет направление перемещения двери для прохождения от начального контролируемого положения Pi до конечного контролируемого положения Pf. "Нормальная" скорость перемещения, т.е. пока не предусмотрено обратное в контексте заданного шага, имеет значение v1. Если командой является закрывание двери, то первое направление определяет направление закрывания, и скорость v1 является скоростью закрывания. И наоборот, если командой является открывание двери, первое направление определяет направление открывания и скорость v1 является скоростью открывания. Аналогичным образом, второе направление, противоположное первому, определяет направление и скорость v2 открывания и закрывания соответственно.
Фиг.1 иллюстрирует блок-схему управляющей программы согласно изобретению, начинающуюся с начального положения Рi, от которого начинается перемещение двери в первом направлении с первой "нормальной" скоростью v1. Если не обнаружено столкновения до желаемого конечного положения Pf, дверь продолжает перемещение со скоростью v1 до положения Pf, где она останавливается. С другой стороны, если дверь сталкивается с препятствием во время своего хода, система обнаруживает столкновение средствами, известными специалистам в данной области техники, принцип которых не влияет на настоящее изобретение до тех пор, пока они предлагают надежное и быстрое обнаружение столкновения. В этот момент позиция Pimpact столкновения записывается, мотор останавливается, и начинается первый цикл (n=1) функции безопасности. Далее ход двери меняется на обратный, во втором направлении, противоположном первому, и дверь движется со скоростью v2 по направлению к позиции ожидания, Pwait, где она останавливается на заданное время Δtwaiting ожидания для возможности устранения препятствия (см. фиг.2).
Согласно предпочтительному варианту осуществления значение Δtwaiting является постоянным для всех N циклов. В качестве альтернативы значение Δtwaiting увеличивается после каждого цикла. Преимущество второго варианта осуществления заключается в том, что если устранение препятствия на пути двери является трудным, увеличение интервала времени в последующих циклах дает больше времени операторам для устранения препятствия. Согласно другому варианту осуществления изобретения позиция Pwaiting ожидания является фиксированной для всех N циклов и может быть начальной контрольной позицией Pi. Однако позиция ожидания может меняться в зависимости от числа циклов n и, таким образом, очевидно, что она также отличается от начальной позиции Pi.
Как только время Δtwaiting истекло, дверь начинает движение в первом направлении со скоростью vl до позиции P3, расположенной впереди и близко к позиции Pimpact столкновения. В позиции P3 система управления дает команду уменьшить скорость с v1 до значения v3, где 0<v3<v1 (см. фиг.2). Предпочтительно значение v3 уменьшается с количеством циклов, и/или уменьшение скорости от v1 до v3 происходит постепенно, когда дверь подходит к позиции Pimpact столкновения. В качестве альтернативы, система может дать команду двери изменить скорость с v1 на скорость v3 мгновенно, что, на практике и благодаря инерции двери, ведет к постепенному переходу от одной скорости к другой; на фиг.2 команда на изменение скорости с v1 на v3 является мгновенной. Данные меры имеют целью ограничить в дальнейшем энергию повторных столкновений, ведущих к износу и повреждениям. Это происходит потому, что, так как энергия пропорциональна квадрату скорости столкновения, повреждения значительно уменьшаются в случае, когда препятствие постоянно находится в одной и той же позиции. С другой стороны, если дверь перемещается с уменьшенной скоростью v3 от позиции Pwaiting ожидания до позиции Pimpact столкновения или даже до конечной позиции Pf, то если препятствие было устранено, перемещение двери будет слишком медленным и займет слишком много времени.
Если препятствие было устранено, и система более не обнаруживает столкновения, когда дверь достигает позиции Pimpact столкновения, дается команда на увеличение скорости движения до "нормального" значения v1, которое поддерживается до достижения дверью конечной контрольной позиции Pf (см. фиг.2, второй цикл (n=2)).
Если, с другой стороны, система обнаруживает новое столкновение в позиции Pimpact, то, поскольку невозможно было устранить препятствие вовремя, система начинает второй цикл остановкой мотора, определением, достигнуто ли максимальное количество N циклов, обратный ход и т.д. Если препятствие не было устранено после заданного числа N столкновений, система выходит из цикла, меняет ход движения на второе направление и перемещает дверь со скоростью v2 до позиции Pstop, в которой дверь останавливается до момента ручного возобновления управления. Данный случай, например, возникает, когда препятствие не может быть перемещено или его некому переместить. Позиция Pstop остановки может соответствовать начальной позиции Pi или иметь любое значение, расположенное до (в отношении первого направления) позиции Pimpact столкновения.
Если во время цикла новое столкновение произошло в любой позиции, отличной от позиции первого столкновения, счетчик циклов переустанавливается в n=1, и функция безопасности применяется снова для данного нового столкновения. Согласно варианту осуществления изобретения случай второго столкновения стирает память первого столкновения. Однако второе столкновение может произойти до (в отношении первого направления) позиции Pimpact первого столкновения, и может быть опасно игнорировать возможное присутствие первого препятствия после устранения второго препятствия с маршрута двери. Для преодоления данной проблемы можно хранить в памяти несколько позиций столкновения во время использования функции безопасности, и таким образом, система управляет "каскадом" столкновений определением позиций Pimpact.k, P3,k, Pwaiting,k, распределенных на пути, лежащим между начальными и конечными контрольными позициями Pi и Pf, и количеством циклов nk, где k соответствует конкретному столкновению (см. фиг.3).
Система управления согласно примерному варианту осуществления изобретения предпочтительно управляет дверью, которая является гибкой шторой, либо в форме гибкого материала (например, текстильная материя или полимерная или металлическая пленка), либо состоит из жестких элементов, соединенных друг с другом подвижным образом, как жалюзи. В случае гибкой шторы, путь шторы обычно линейный, такой, например, как у вертикальной шторы, открывание которой производится движением шторы по направлению вверх. В качестве альтернативы, дверь может быть жесткой, путь движения которой либо линейный, либо угловой, например, если дверь установлена на петлях или вращающемся валу.
Один из примерных вариантов осуществления изобретения показан на фиг.4-6. Система 10 включает в себя мотор и управление 12, которые служат движущим средством для перемещения двери 14, которая может быть разновидностями двери, раскрытыми выше, или другой подходящей конструкцией. Близко к двери 14 расположен датчик 16, являющийся в примерном варианте осуществления фотоэлектрическим, однако может быть использована другая сенсорная техника, такая как датчики предметов или движения, магнитные или индукционные датчики. Датчик 16 служит сенсорным средством для обнаружения условий вблизи двери 14, и подключен к устройству функции безопасности, такому как микропроцессор, и связанной с ним памятью или специализированной интегральной схемой, которое может быть размещено в моторе и управлении 12 или связанно с системой 10 как-либо еще и служащее как средство для выполнения управляющей программы, раскрытой выше.
Предпочтительно, чтобы "нормальная" скорость закрывания двери была меньше скорости открывания, особенно в случае гибкой или жесткой вертикальной двери с линейным маршрутом, закрытие которой производится опусканием двери, поскольку, в данном случае, столкновение может произойти только в случае, когда первое направление является направлением закрытия. Энергия такого потенциального столкновения, таким образом, уменьшается для избежания прямого значительного повреждения двери и препятствия при опускании двери со скоростью v1, меньшей скорости v2 открывания во втором направлении, поскольку дверь обычно не должна встретить препятствие, когда она поднимается.
Несмотря на то что данное изобретение было описано, как имеющее примерный замысел, настоящее изобретение может быть дополнительно модифицировано в рамках идеи и объема данного изобретения. Данная заявка, таким образом, подразумевает охват любых изменений, использования или переделок изобретения с использованием его общих принципов. Кроме того, данная заявка подразумевает охват таких отступлений от настоящего изобретения, которые входят в рамки известной или обычной практики в области техники, к которой принадлежит данное изобретение.
Система управления дверью, позволяющая ее движение от начального положения ее пути в первом направлении со скоростью v1 до конечного положения, система управления содержит функцию безопасности, содержащую средство для поддержания работы двери, несмотря на то, что она столкнулась с препятствием, расположенным на ее пути, и обеспечения автоматического продолжения ее начального движения, как только препятствие устранено, посредством конструкции, сочетающей достаточно высокую нормальную скорость v1 движения двери с решением задачи предотвращения повреждения как двери, так и препятствия путем уменьшения скорости до v3<v1 вблизи сохраненного в памяти положения столкновения. 3 н. 17 з.п. ф-лы, 6 ил.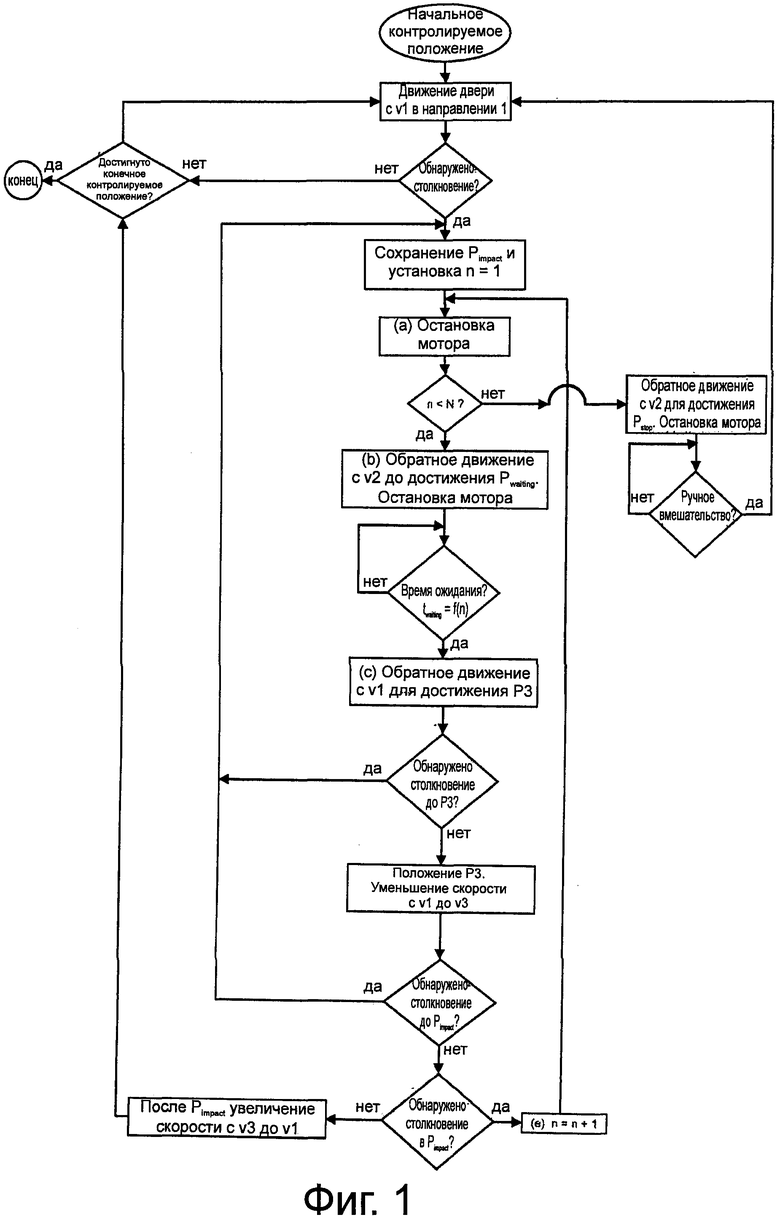
1. Система управления дверью для закрывания проемов в сооружениях или любых типов проемов, характеризующаяся тем, что обеспечивает движение двери от начального контролируемого положения Pi на ее пути в первом направлении со скоростью v1 до достижения конечного контрольного положения Pf, при этом указанная система управления содержит функциональный узел безопасности, содержащий средство для выполнения следующих шагов в случае столкновения с препятствием, преграждающим путь двери в первом направлении:
(a) обнаружение столкновения, остановку мотора и сохранение в памяти положения Pimpact столкновения, и далее
(b) обратное перемещение двери во втором направлении, противоположном первому, со скоростью v2 до достижения положения Pwaiting ожидания, заданного так, чтобы оставить достаточное пространство для устранения препятствия;
при этом функция безопасности содержит следующие дополнительные шаги:
(c) после времени ожидания, Δtwaiting, в положении ожидания, Pwaiting, движение двери в первом направлении со скоростью v1 до достижения заданного положения P3, расположенного до положения Pimpact столкновения, и в этой точке скорость движения в первом направлении уменьшается до значения v3, где 0<v3<v1;
(d) если при движении двери в первом направлении с уменьшенной скоростью v3 препятствие более не обнаружено в положении Pimpact, увеличивается скорость движения в первом направлении до значения v1, пока дверь не достигнет конечного контролируемого положения Pf;
(e) если, с другой стороны, при движении двери в первом направлении с уменьшенной скоростью v3 снова обнаружено препятствие в том же положении Pimpact, цикл, определенный шагами (a)-(с), повторяется, а шаг (d) выполняется, если определенные в нем условия удовлетворены;
(f) если после заданного числа N повторений указанного цикла препятствие по-прежнему обнаружено, дверь перемещается во втором направлении со скоростью v2 и останавливается в заданном положении Pstop до ручного перезапуска системы управления.
2. Система управления по п.1, в которой значение Δtwaiting является постоянным для всех N циклов.
3. Система управления по п.1, в которой значение Δtwaiting увеличивается после каждого цикла.
4. Система управления по п.1, в которой положение ожидания является фиксированным для всех N циклов.
5. Система управления по п.1, в которой положение ожидания изменяется в зависимости от числа циклов.
6. Система управления по п.1, в которой первое направление является направлением закрытия двери и v2≥v1.
7. Система управления по п.1, в которой значение v3 уменьшается в зависимости от числа циклов.
8. Система управления по п.1, в которой уменьшение скорости от v1 до v3 происходит постепенно по мере приближения двери к положению Pimpact столкновения.
9. Система управления по п.1, в которой положение Pwaiting ожидания и/или положение Pstop остановки соответствуют начальному контролируемому положению Pi.
10. Система управления по п.1, в которой путь двери является линейным.
11. Система управления по п.1, в которой путь двери является угловым.
12. Система управления по п.1, в которой дверь является жесткой.
13. Система управления по п.1, в которой дверь является гибкой шторой.
14. Способ выполнения функции безопасности при управлении дверью для закрывания проемов в сооружениях или любых типов проемов, характеризующийся тем, что обеспечивают движение двери от начального контролируемого положения Pi на ее пути в первом направлении со скоростью v1 до достижения конечного контролируемого положения Pf, при этом указанная система управления содержит функциональный узел безопасности, содержащий средства для выполнения следующих шагов в случае столкновения с препятствием, преграждающим путь двери в первом направлении:
(a) обнаружение столкновения, остановку мотора и сохранение в памяти положения Pimpact столкновения, и далее
(b) обратное перемещение двери во втором направлении, противоположном первому, со скоростью v2 до достижения положения Pwaiting ожидания, заданного так, чтобы оставить достаточное пространство для устранения препятствия;
при этом функция безопасности содержит следующие дополнительные шаги:
(c) после времени ожидания, Δtwaiting, в положении ожидания, Pwaiting, движение двери в первом направлении со скоростью v1 до достижения заданного положения P3, расположенного до положения Pimpact столкновения, и в этой точке скорость движения в первом направлении уменьшается до значения v3, где 0<v3<v1;
(d) если при движении двери в первом направлении с уменьшенной скоростью v3 препятствие более не обнаружено в положении Pimpact, увеличивается скорость движения в первом направлении до значения v1, пока дверь не достигнет конечного контролируемого положения Pf;
(e) если, с другой стороны, при движении двери в первом направлении с уменьшенной скоростью v3 снова обнаружено препятствие в том же положении Pimpact, цикл, определенный шагами (a)-(c), повторяется, и шаг (d) выполняется, если определенные в нем условия удовлетворены;
(f) если после заданного числа N повторений указанного цикла препятствие по-прежнему обнаружено, дверь перемещается во втором направлении со скоростью v2 и останавливается в заданном положении Pstop до ручного перезапуска системы.
15. Способ по п.14, в котором значение Δtwaiting является постоянным для всех N циклов.
16. Способ по п.14, в котором значение Δtwaiting увеличивают после каждого цикла.
17. Способ по п.14, в котором положение ожидания является фиксированным для всех N циклов.
18. Способ по п.14, в котором положение ожидания изменяют в зависимости от числа циклов или оно соответствует начальному контролируемому положению Pi.
19. Способ по п.14, в котором первое направление является направлением закрытия двери и v2≥v1.
20. Система управления дверью для закрывания проемов в сооружениях или любых типов проемов, характеризующаяся тем, что обеспечивает движение двери от начального контролируемого положения Pi на ее пути в первом направлении со скоростью v1 до достижения конечного контролируемого положения Pf, при этом указанная система управления содержит движущее средство для перемещения двери, сенсорное средство для обнаружения условий вблизи двери и функциональный узел безопасности, содержащий средства для выполнения следующих шагов в случае столкновения с препятствием, преграждающим путь двери в первом направлении:
(a) обнаружение столкновения, остановку мотора и сохранение в памяти положения Pimpact столкновения, и далее
(b) обратное перемещение двери во втором направлении, противоположном первому, со скоростью v2 до достижения положения Pwaiting ожидания, заданного так, чтобы оставить достаточное пространство для устранения препятствия;
при этом функция безопасности содержит следующие дополнительные шаги:
(c) после времени ожидания, Δtwaiting, в положении ожидания, Pwaiting, движение двери в первом направлении со скоростью v1 до достижения заданного положения P3, расположенного до положения Pimpact столкновения, и в этой точке скорость движения в первом направлении уменьшается до значения v3, где 0<v3<v1;
(d) если при движении двери в первом направлении с уменьшенной скоростью v3 препятствие более не обнаружено в положении Pimpact, увеличивается скорость движения в первом направлении до значения v1, пока дверь не достигнет конечного контролируемого положения Pf;
(e) если, с другой стороны, при движении двери в первом направлении с уменьшенной скоростью v3 снова обнаружено препятствие в том же положении Pimpact, цикл, определенный шагами (a)-(c), повторяется, и шаг (d) выполняется, если определенные в нем условия удовлетворены;
(f) если после заданного числа N повторений указанного цикла препятствие по-прежнему обнаружено, дверь перемещается во втором направлении со скоростью v2 и останавливается в заданном положении Pstop до ручного перезапуска системы.
| US 2007001637 A1, 04.01.2007 | |||
| US 2007075655 A1,05.04.2007 | |||
| US 6150785 A, 21.11.2000 | |||
| US 2004210327 A1, 21.10.2004 | |||
| . |

