Изобретение относится к железнодорожной технике, а именно к железнодорожной автоматике и телемеханике, и может быть использовано для регулирования движения поездов.
Известен способ авторегулировки скорости [Путевая блокировка и авторегулировка / Н.Ф. Котляренко [и др.] - М.: Транспорт, 1983. - 408 с.]. Способ предназначен только для поддержания программной скорости и не позволяет определить оптимальную скорость движения поезда.
Известен способ регулирования маневровых передвижений [Казаков А.А. Станционные системы автоматики и телемеханики / А.А. Казаков, В.Д. Бубнов, Е.А. Казаков. - М.: Транспорт, 1990. - 432 с.(стр. 46)], заключающийся в том, что на локомотив поступает информация о готовности маневрового маршрута за счет показаний маневровых светофоров
Недостатками способа являются наличие напольных светофоров, отсутствие указателей длины и сложности маршрута, сложность процесса регулирования маневровых передвижений.
Данное техническое решение выбрано в качестве прототипа.
Техническим результатом является повышение эффективности маневровых работ за счет оптимизации управления.
Технический результат достигается тем, что в способе регулирования маневровых передвижений без маневровых светофоров, заключающемся в том, что на локомотив поступает информация о готовности маневрового маршрута, согласно изобретению информация о готовности маршрута отображается на локомотивном табло с учетом расстояния от маневрового состава до препятствия и направления движения, которые определяют с помощью системы GPS без маневровых светофоров.
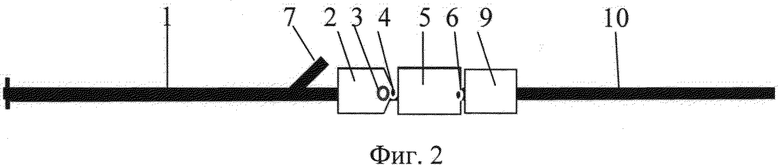
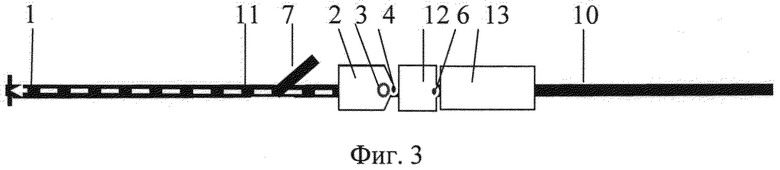
На фиг. 1 представлено путевое развитие станции с тупиком 1, локомотивом 2, на котором смонтированы приемник 3 и датчик GPS 4 (маячок), первой группой вагонов 5, мобильным датчиком 6 (переносной датчик составителя), стрелочным переводом 7, первым маневровым маршрутом 8 (пунктирная стрелка), второй группой вагонов 9, приемоотправочным путем 10.
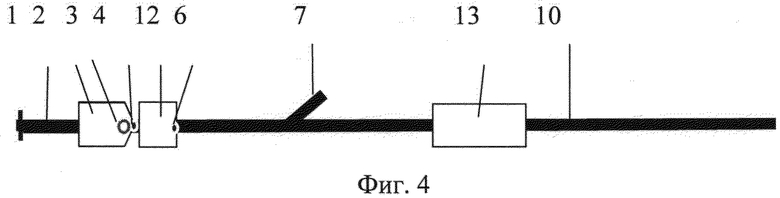
На фиг. 2-4 дополнительно предусмотрены: второй маневровый маршрут 11, третья группа вагонов 12, четвертая группа вагонов 13.
Способ реализуется следующим образом. В тупике 1 (фиг. 1) находится локомотив 2 с приемником 3 и датчиком 4 и первая группа вагонов 5 с переносным датчиком 6 (который находится у составителя, на фиг. 1-4 составитель не показан). Переносной маячок 6 непрерывно включен и локомотивная ЭВМ (на фиг. 1-4 не показана) за счет приемника 3 непрерывно отслеживает его местонахождение, а следовательно, и расстояние до препятствия. Расстояние до препятствия определяется ЭВМ путем вычитания от координаты границы второй группы вагонов 9, известной заранее (зафиксированной в момент их выставления на путь), координаты мобильного датчика 6. С учетом направления движения и расстояния до препятствия формируется маневровый маршрут и по его готовности на локомотивном табло (навигаторе) отображается пунктирной стрелкой маршрут следования 8 маневрового состава (локомотив 2 и первая группа вагонов 5). Это исходное состояние подвижного состава.
Маневровая работа заключается в том, что часть вагонов от первой группы 5 нужно прицепить ко второй группе вагонов 9, которые стоят на пути 10, а оставшиеся вагоны вернуть в тупик 1. Для этого машинист двигается по первому маршруту 8 (фиг. 1), останавливает состав у второй группы вагонов 9 (фиг. 2). Составитель сцепляет первую 5 и вторую 9 группы вагонов, переходит с маячком к месту расцепки первой группы вагонов 5, расцепляет их (фиг. 3), формируя третью группу вагонов 12 для возврата в тупик 1 и четвертую группу вагонов 14 для оставления на пути. На локомотивном табло с учетом расстояния до препятствия (тупика 1) и направления движения устанавливается второй маневровый маршрут 11. При его готовности начинается движение состава. В результате локомотив с третьей группой вагонов 12 оказывается в тупике, а четвертая группа вагонов 13 - на приемоотправочном пути 10 (фиг. 4). Стрелка 7 предназначена для того, чтобы отделить путь от тупика.
Предлагаемый способ оптимизирует процесс управления маневровыми передвижениями, снижает капитальные затраты и затраты на ремонтные работы и эксплуатацию, что повышает эффективность маневровых работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОЕЗДНЫМ И МАНЕВРОВЫМ ЛОКОМОТИВАМИ | 2017 |
|
RU2657479C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МАНЕВРОВЫХ ПЕРЕДВИЖЕНИЙ | 2017 |
|
RU2672348C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ | 2010 |
|
RU2422315C1 |
| Система управления маневровыми локомотивами | 2016 |
|
RU2622524C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2004 |
|
RU2277054C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ МАНЕВРОВОГО ЛОКОМОТИВА | 2005 |
|
RU2284275C1 |
| Комплексная система управления маневровыми локомотивами | 2019 |
|
RU2725575C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА, МАНЕВРОВОГО СОСТАВА ИЛИ ОДИНОЧНОГО ЛОКОМОТИВА ПО СТАНЦИИ И НА ПОДХОДАХ К НЕЙ | 2007 |
|
RU2352487C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНЕВРОВЫМ ЛОКОМОТИВОМ | 2020 |
|
RU2732266C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано для регулирования движения поездов. В способе проведения маневровых работ на локомотив поступает информация о готовности маневрового маршрута и отображается на локомотивном табло с учетом расстояния от маневрового состава до препятствия и направления движения. Причем расстояние и направление определяют посредством установленных на локомотиве GPS-датчика, локомотивной ЭВМ, приемника, непрерывно отслеживающего местоположение переносного маячка, и заданной координаты группы вагонов. Достигается повышение эффективности маневровых работ. 4 ил.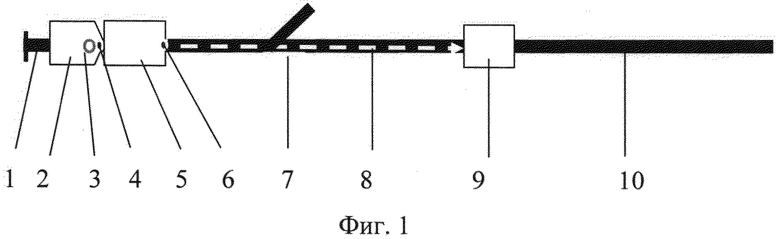
Способ проведения маневровых работ без маневровых светофоров, заключающийся в том, что на локомотив поступает информация о готовности маневрового маршрута, отличающийся тем, что информация о готовности маршрута отображается на локомотивном табло с учетом расстояния от маневрового состава до препятствия и направления движения, которое определяют посредством установленных на локомотиве GPS-датчика, локомотивной ЭВМ, приемника, непрерывно отслеживающего местоположение переносного маячка, и заданной координаты группы вагонов.
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЛОКОМОТИВОМ | 2004 |
|
RU2374113C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ МАНЕВРОВЫМИ РАБОТАМИ В ЭЛЕКТРОДЕПО МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2004 |
|
RU2247047C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ ПРИ МАНЕВРОВОЙ РАБОТЕ НА ЖЕЛЕЗНОДОРОЖНОЙ СТАНЦИИ | 1999 |
|
RU2179518C2 |

