Область техники, к которой относится изобретение
Изобретение относится к железнодорожной технике, а именно к железнодорожной автоматике и телемеханике, и может быть использовано для регулирования движения поездов.
Уровень техники
Известен способ передачи информации на подвижной состав для управления движением поездов путем трансляции импульсов кодового тока в рельсовую линию от кодово-путевого трансмиттера с момента занятии рельсовой цепи [Казаков А.А., Казаков Е.А. Автоблокировка, автоматическая локомотивная сигнализация и автостопы. М.: Транспорт, 1980. – 360 с. (с. 280, 3 абз.)].
Недостатком способа является то, что при движении по коротким кодируемым станционным участкам в горловине станции наблюдаются сбои в работе автоматической локомотивной сигнализации (АЛС), а также очень громоздкие схемы трансляции импульсов. [Леонов А.А. Техническое обслуживание автоматической локомотивной сигнализации. М.: Транспорт, 1982. – 256 с. (с. 107-108)].
Известен способ регулирования маневровых передвижений без маневровых светофоров [патент RU 2572457], заключающийся в том, что на локомотив поступает информация о готовности маневрового маршрута, информация о готовности маршрута отображается на локомотивном табло с учетом расстояния от маневрового состава до препятствия и направления движения, которое определяют посредством установленных на локомотиве GPS-датчика, локомотивной ЭВМ, приемника, непрерывно отслеживающего местоположение переносного маячка и заданной координаты местонахождения группы вагонов.
Недостатком способа является то, что он не учитывает поездные передвижения, конфигурацию маневрового маршрута и параметры маневрового состава и локомотива.
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Технический результат достигается тем, что предложен способ управления поездным и маневровым локомотивами, заключающийся в том, что на локомотив передают информацию о готовности маршрута, которую отображают на локомотивном табло, а также расстояние до стоящих на станционных путях поездах, которое определяют с использованием приемников системы ГЛОНАСС, один из которых располагают на локомотиве, а другой - у составителя и локомотивной ЭВМ, согласно которому управление маневровым локомотивом осуществляет составитель, который снабжен мобильным блоком с органами управления и контроля, средствами связи и контроллером, благодаря которым составитель вводит информацию о маневровом составе, посылает команды на передвижение состава на пост электрической централизации, где посредством станционной ЭВМ определяют оптимальную скорость движения и посредством средств связи управляют маневровым локомотивом, который может управляться и машинистом; поездной локомотив также может управляться машинистом посредством контроллера и крана машиниста или посредством локомотивной ЭВМ, в которую вводят информацию с диска о плане и профиле путей перегона и станций, а также информация о параметрах состава и локомотива, от системы автоматической локомотивной сигнализации и средств связи с постом ЭЦ - о готовности и конфигурации маршрута, что позволяет осуществить автоведение поезда и автоматизировать маневровые передвижения.
Краткое описание чертежей
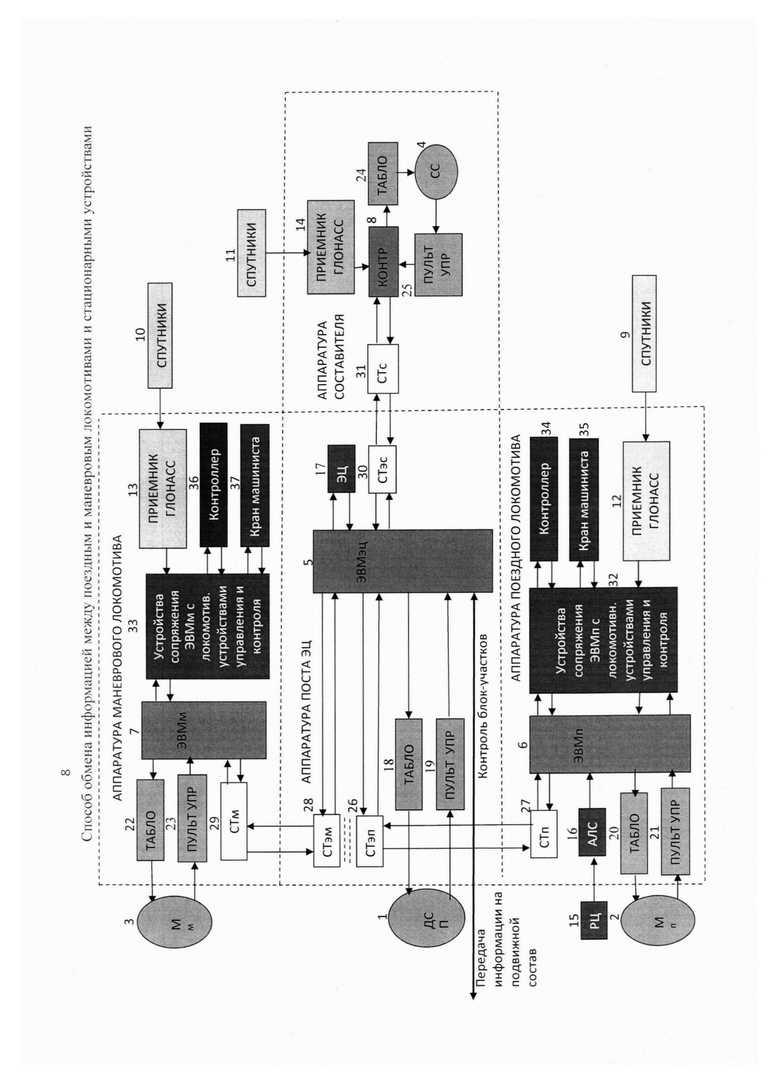
На чертеже представлена блок-схема заявленного способа.
Осуществление изобретения
Условные обозначения:
1 - сменный помощник начальника станции (ДСП),
2 - машинист поездного локомотива,
3 - машинист маневрового локомотива.
4 - составитель,
5 - ЭВМ на посту ЭЦ,
6 - ЭВМ на поездном локомотиве,
7 - ЭВМ на маневровом локомотиве,
8 - контроллер составителя,
9 - спутники, воздействующие на приемник в поездном локомотиве,
10 - спутники, воздействующие на приемник в поездном локомотиве,
11 - спутник, воздействующий на приемник составителя,
12 - приемник ГЛОНАСС в поездном локомотиве,
13 - приемник ГЛОНАСС в маневровом локомотиве,
14 - приемник ГЛОНАСС у составителя,
15 - рельсовая цепь,
16 - устройства АЛС на поездном локомотиве,
17 - устройства ЭЦ,
18 - табло на посту ЭЦ,
19 - пульт управления на посту ЭЦ,
20 - табло на поездном локомотиве (навигатор),
21 - пульт управления на поездном локомотиве,
22 - табло на поездном локомотиве (навигатор),
23 - пульт управления на маневровом локомотиве,
24 - табло составителя (навигатор),
25 - пульт управления составителя,
26 - сотовый телефон для связи поста ЭЦ с поездным локомотивом,
27 - сотовый телефон для связи поездного локомотивом с постом ЭЦ,
28 - сотовый телефон для связи поста ЭЦ с маневровым локомотивом,
29 - сотовый телефон для связи маневрового локомотивом с постом ЭЦ,
30 - сотовый телефон для связи поста ЭЦ с составителем,
31 - сотовый телефон для связи составителя с постом ЭЦ,
32 - устройства сопряжения ЭВМп с поездным локомотивом,
33 - устройства сопряжения ЭВМм с маневровым локомотивом,
34 - локомотивный контроллер поездного локомотива,
35 - кран машиниста поездного локомотива,
36 - локомотивный контроллер маневрового локомотива,
37 - кран машиниста маневрового локомотива.
Предложенный способ обмена информацией между поездным и маневровым локомотивами и стационарными устройствами позволяет: автоматизировать маневровые передвижения [Способ регулирования маневровых передвижений без маневровых светофоров. 257 24 57]; способствововать реализации автоведения поездов на станциях с учетом плана и профиля пути (на локомотив передается номер пути приема); осуществить дистанционное управление локомотивом составителем; отказаться от напольных светофоров [Способ контроля состояния рельсовой линии. Патент RU 2581277], что будет также способствовать тому, чтобы полностью отказаться от использования изолирующих стыков на станции [Патент RU 2581277], снизить затраты на строительство и эксплуатацию рельсовых цепей, повысить их надежность; повысить информативность локомотивных систем контроля поездных и маневровых маршрутов.
Реализация способа осуществляется следующим образом. На посту электрической централизации, кроме приборов СЦБ 17, предусмотрена вычислительная машина ЭВМэц 5, табло (планшетник) 18, пульт управления (планшетник) 19, сотовый телефон СТэм 28 для связи поста ЭЦ и с сотовым телефоном СТм 29 маневрового локомотива, сотовые телефоны СТэп 26 для связи поста ЭЦ с сотовыми телефонами СТп 27 поездных локомотивов, а также сотовый телефон СТэс 30 для связи поста ЭЦ с сотовым телефоном составителя СТс 31.
На поездном локомотиве предусмотрены органы управления локомотивом - контроллер 34 и кран машиниста 35, устройство сопряжения ЭВМп 32 с локомотивными устройствами управления и контроля, приемник ГЛОНАСС 12, электронно-вычислительная машина поездного локомотива ЭВМп 6, локомотивные устройства АЛС 16, табло (планшетник) 20, пульт управления (планшетник) 21.
На маневровом локомотиве отображены органы управления локомотивом - контроллер 36 и кран машиниста 37, устройство сопряжения ЭВМм 33 с локомотивными устройствами управления и контроля, приемник ГЛОНАСС 13, электронно-вычислительная машина маневрового локомотива ЭВМп 7, табло (планшетник) 22, пульт управления (планшетник) 23.
У составителя находится мобильный блок, в котором находятся: приемник ГЛОНАСС 14, контроллер 8, табло 24, пульт управления 25, сотовый телефон СТс 31.
Приемники ГЛОНАСС 12, 13 и 14 получают информацию со спутников 9, 10 и 14, а локомотивные устройства АЛС 16 - с рельсовой цепи 15. Поездными передвижениями руководят: сменный помощник начальника станции 1 и машинист поездного локомотива. Маневровыми передвижениями руководят: сменный помощник начальника станции 1, машинист маневрового локомотива 3 и составитель 4.
В память поездной локомотивной ЭВМп 6 вводится информация с диска о плане и профиле пути (конфигурация станций и перегонов, уклоны, ограничения скорости по пути и т.д.), параметры поезда (длина и вес поезда, тип локомотива, ограничения скорости по подвижному составу и т.д.), номера телефонов станций по пути следования.
В память маневровой локомотивной ЭВМм 7 вводится информация с диска о плане и профиле станционных путей (конфигурация станции, уклоны, ограничения скорости по пути и т.д.), параметры маневрового состава (длина и вес состава, тип локомотива, ограничения скорости по подвижному составу и т.д.).
При подходе поезда к станции по рельсовым цепям 15 участков приближения на локомотив по системе АЛС 16 передается информация о количестве свободных путевых участков до станции, готовности маршрута приема и отправления, количестве свободных путевых участков отправления. После входа поезда на станцию информация о готовности маршрута отправления и свободности путевых участков поступает по каналу сотовой связи с участием телефонов 26 и 27. Включение и выключение телефонов, а также генерация кодовых импульсов осуществляет ЭВМ под воздействием устройств АЛС 16, устройств ЭЦ 17, устройств сопряжения 32 и 33. Сообщения по телефонам передаются на одной или нескольких тональных частотах. Информационным является период посылки кодовых импульсов. Устройство сопряжения получает информацию от ЭВМ 6, осуществляет механическое воздействие на контроллер 34 и кран машиниста 35, а также передает контрольные сигналы о позиции контроллера и положении крана машиниста в ЭВМ 6. Кроме того, ЭВМ 6 посредством устройства сопряжения 32 через приемник 12 от спутников 9 получает информацию о месте нахождения поездного локомотива. Машинист через пульт 21, ЭВМ 6, устройство сопряжения 32 может управлять контроллером 34 и краном 35. В штатном режиме скоростной режим выбирается и поддерживается ЭВМ 6. На локомотивном табло 20 отображается информация о состоянии впереди лежащих путевых участках, плане и профиле пути, состоянии станционных маршрутных участках, а также кривая оптимальной и допустимой скорости движения поезда.
Управление маневровым локомотивом, в отличие от поездного, может осуществлять кроме машиниста 3 и составитель 4, который также участвует и в установке маневрового маршрута. В мобильном блоке составителя предусмотрен пульт управления 25, который позволяет устанавливать маршрут, регулировать скорость движения и реверсировать движение состава. Для контроля местонахождения составителя предусмотрен приемник ГЛОНАСС 14, который получает информацию со спутников 11, а также табло 24 и контроллер (миниЭВМ) 8. Вся информация с мобильного блока с участием телефонов СТс 31 и СТэс 30 передается в вычислительную машину ЭВМэц 5 поста ЭЦ, где с участием аппаратуры ЭЦ 17 проверяется возможность установки маршрута (условия безопасности), определяется оптимальная и допустимая скорости движения. Контроль за установкой маршрута осуществляет и ДСП 1 посредством табло 18. ДСП может самостоятельно устанавливать и отменять любые маршруты с помощью пульта управления 19. Информация с ЭВМэц с участием телефонов СТэм 28 и СТм 29 передается в ЭВМм 7 маневрового локомотива 7. Полученная информация позволяет сформировать команды на управление контроллером 36 и краном 37. ЭВМм 7 может получать информацию и от машиниста 3 с участием пульта управления (планшетник) 23. Информация с ЭВМм 7 отображается на табло 22 (планшетник), в т.ч. и о позиции контроллера 36 и крана 37. Информация о местонахождении локомотива определяется посредством спутников 10, приемника ГЛОНАСС 13 устройства сопряжения 33.
Информация о местонахождении подвижного состава на станционных путях определяется приемником ГЛОНАСС 14 [патент RU 2572457].
При управлении движения маневрового состава машинистом ЭВМм участвует в определении оптимальной и допустимой скорости движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ О СОСТОЯНИИ РЕЛЬСОВЫХ ЦЕПЕЙ НА СКОРОСТНЫЕ ПОЕЗДА | 2022 |
|
RU2781704C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2770034C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МАНЕВРОВЫХ ПЕРЕДВИЖЕНИЙ | 2017 |
|
RU2672348C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2020 |
|
RU2730699C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНЕВРОВЫМ ЛОКОМОТИВОМ | 2020 |
|
RU2732266C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПОМОЩЬЮ РАДИОСИГНАЛОВ | 2019 |
|
RU2714962C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714966C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2018 |
|
RU2694679C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714824C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
Изобретение относится к путевым устройствам для управления подвижным составом. Предложен способ управления поездным и маневровым локомотивами. На локомотив передают информацию о готовности маршрута, а также расстояние до стоящих на станционных путях поездах. Расстояние определяют с использованием приемников системы ГЛОНАСС. Управление маневровым локомотивом осуществляет составитель, который снабжен мобильным блоком управления. Составитель вводит информацию о маневровом составе, посылает команды на передвижение состава на пост электрической централизации, где посредством станционной ЭВМ определяют оптимальную скорость движения и посредством средств связи управляют маневровым локомотивом. Поездной локомотив управляется посредством локомотивной ЭВМ, в которую вводят информацию с диска о плане и профиле путей перегона и станций, а также информацию о параметрах состава и локомотива. От системы автоматической локомотивной сигнализации и средств связи с постом электрической централизации вводят информацию о готовности и конфигурации маршрута. Маневровый и поездной локомотивы также могут управляться машинистом. Технический результат изобретения заключается в том, что управление поездным локомотивом осуществляется с учетом конфигурации маневрового маршрута. 1 ил.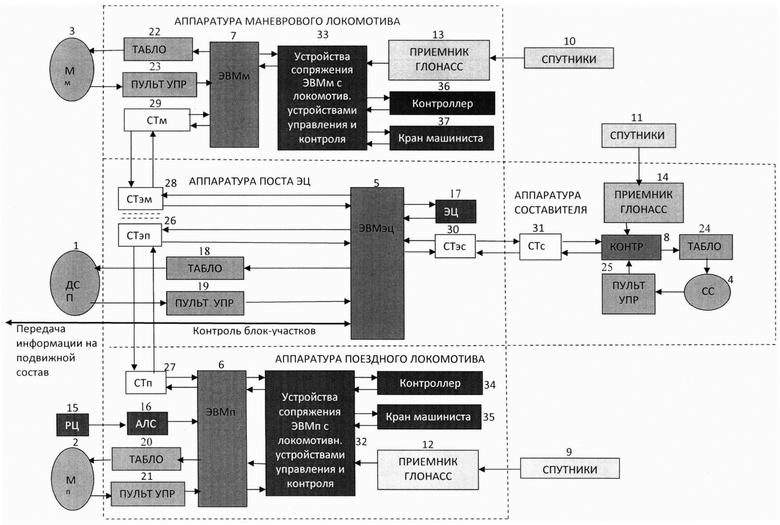
Способ управления поездным и маневровым локомотивами, заключающийся в том, что на локомотив передают информацию о готовности маршрута, которую отображают на локомотивном табло, а также расстояние до стоящих на станционных путях поездах, которое определяют с использованием приемников системы ГЛОНАСС, один из которых располагают на локомотиве, а другой - у составителя и локомотивной ЭВМ, отличающийся тем, что управление маневровым локомотивом осуществляет составитель, который снабжен мобильным блоком с органами управления и контроля, средствами связи и контроллером, благодаря которым составитель вводит информацию о маневровом составе, посылает команды на передвижение состава на пост электрической централизации, где посредством станционной ЭВМ определяют оптимальную скорость движения и посредством средств связи управляют маневровым локомотивом, который может управляться и машинистом; поездной локомотив также может управляться машинистом посредством контроллера и крана машиниста или посредством локомотивной ЭВМ, в которую вводят информацию с диска о плане и профиле путей перегона и станций, а также информацию о параметрах состава и локомотива, от системы автоматической локомотивной сигнализации и средств связи с постом ЭЦ - о готовности и конфигурации маршрута, что позволяет осуществить автоведение поезда и автоматизировать маневровые передвижения.
| СПОСОБ РЕГУЛИРОВАНИЯ МАНЕВРОВЫХ ПЕРЕДВИЖЕНИЙ БЕЗ МАНЕВРОВЫХ СВЕТОФОРОВ | 2014 |
|
RU2572457C2 |
| Оптическая игрушка | 1954 |
|
SU102345A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАНЕВРОВЫМ ЛОКОМОТИВОМ | 2010 |
|
RU2432283C1 |
| US 6135396 A, 24.10.2000. | |||

