Изобретение относится к области геодезии для межевания и определения границ земельных участков, в частности для создания геодезических сетей различного назначения, а также при проведении инженерных изысканий и при снятии координат с пунктов геодезической сети без применения штатных геодезических приборов, используя в основе спутниковую навигацию.
Известен способ определения координат пунктов опорно-межевой сети и межевых знаков, состоящий из полевых и камеральных работ, связанных со сгущением точек геодезической сети, осуществляемый путем прокладки теодолитных ходов или засечек для определения планового положения точек опорной межевой сети и опорных межевых знаков (Приказ Министерства экономического развития Российской Федерации от 17 августа 2012 г. N518 г. Москва «О требованиях к точности и методам определения координат характерных точек границ земельного участка, а также контура здания, сооружения или объекта незавершенного строительства на земельном участке». Статья 3, с. 2).
Недостатком данного способа является трудоемкое выполнение работ оператором в пешем режиме инструментальным способом с применением геодезических приборов и спутниковых приемников.
Известен способ определения координат с помощью спутниковых наземных DGPS приемников, выполняемый вручную в пешем режиме путем перемещения спутниковой станции с приемником с точки наблюдения на точку в радиусе действия базовой станции с получением координат определяемых точек (Руководство по созданию и реконструкции городских геодезических сетей с использованием спутниковых систем Глонасс/GPS. Утверждено ФСГ и КР от 15.03.2003 г. №84-пр. Москва).
По наибольшему количеству сходных признаков и достигаемому при использовании результату данное техническое решение выбрано в качестве прототипа.
Недостатком данного способа является перемещение приемной антенны исполнителем вручную в пешем режиме, что утяжеляет и удлиняет выполнение полевых работ оператором или геодезистом.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в создании роботизированного способа производства данного вида работ.
Для достижения технического результата в способе определения точек геодезических координат с помощью лазерного устройства, установленного на роботизированном коптере с DGPS приемником, путем перемещения спутниковой станции с приемником с точки наблюдения на точку в радиусе действия базовой станции с получением координат определяемых точек, лазерное устройство устанавливают в блок подвески с позиционными стабилизаторами в нижней части роботизированного коптера точно под геометрической осью антенны, например с DGPS (Глонасс, Галилео) приемником, рядом располагают видеокамеру, позволяющую оператору визуально наводить с помощью горизонтального перемещения роботизированного коптера проектируемый лазерный луч на середину геодезической марки и удерживать роботизированный коптер в течение короткого промежутка времени, например, от 5 до 10 минут, в этом положении до установки DGPS приемником точности своего пространственного положения, затем нажатием соответствующей клавиши на компьютере запоминают координаты данной точки центрирования, и последовательно перемещают роботизированный коптер по обследуемому участку (точкам), снимая координаты всех необходимых пунктов.
Кроме того, заявленное решение имеет факультативные признаки, характеризующие его частные случаи, а именно:
- грубые координаты искомых пунктов по заранее установленной системе пространственных координат в камеральных условиях вводят в полетное задание, например при прокладке маршрута, сокращая время на поиск пунктов (точек) для их определения;
- при закладке пунктов (точек) по имеющимся данным координаты вводят из каталогов или других источников в полетное задание, направляя роботизированный коптер в искомую точку, который зависает над ней, при этом исполнитель закладывает в точку проектируемого луча с помощью лазерного устройства марку или репер.
Отличительными признаками предлагаемого способа являются: установление лазерного устройства в блок подвески с позиционными стабилизаторами в нижней части роботизированного коптера точно под геометрической осью антенны, расположение видеокамеры для наведения с помощью горизонтального перемещения роботизированного коптера лазерного луча на середину геодезической марки, удержание роботизированного коптера в течение короткого промежутка времени, например от 5 до 10 минут, в этом положении до установки DGPS приемником точности своего пространственного положения, нажатие соответствующей клавиши на компьютере для запоминания координаты данной точки центрирования, последовательное перемещение роботизированного коптера по обследуемому участку (точкам), снятие координаты необходимых пунктов.
Благодаря отличительным признакам предлагаемый способ фактически отменяет проведение объемных затратных геодезических работ, принятых с применением дорогостоящих геодезических приборов, роботизация принципа выполнения данного вида геодезических работ путем замены оператора роботизированным коптером, для снятия координат с пункта (точки) или указания координат на поверхности земли с помощью лазерного устройства (луча), повышение эффективности и производительности в производстве геодезических работ при проведении работ, связанных с разбивкой геодезической сети, сгущения геодезической сети, созданием разбивочной сети, межеванием земель, снятием координат, определением точки установки межевого или других знаков по целеуказанию с помощью лазерного устройства, устанавливаемого на роботизированном коптере управляемым оператором дистанционно или в программируемом режиме.
Предлагаемый способ определения точек геодезических координат с помощью лазерного устройства, установленного на роботизированном коптере с DGPS приемником, иллюстрируется чертежом, на котором показан общий вид лазерного устройства.
На чертеже позициями обозначены:
1 - блок управления,
2 - антенна для приемки спутниковых сигналов современных геодезических навигационных систем (GPS, Глонасс, Галилео, Компас),
3 - подъемно-несущие винты для управления полетом роботизированного коптера,
4 - черно-белая или цветная видеокамера визуального управления полетом,·
5 - лазерное устройство, формирующее лазерный луч целиуказания,
6 - стойки,
7 - проектируемый лазерный луч,
8 - пункт съемочной сети (точки),
9 - поверхность Земли.
Способ осуществляется следующим образом.
Оператор с помощью роботизированного коптера разбивает площадку или определяет установку (закладку) пунктов геодезической сети на поверхности Земли 9, когда по предварительно занесенным в полетную программу координатам роботизированный коптер выводят на заданную точку и с помощью проектируемого лазерного луча 7 подсвечивают точку закладки пункта съемочной сети 8.
Роботизированный коптер с блоком управления 1, опирающийся на стойки 6, имеющий DGPS (Глонасс, Галилео и т.д.) антенну для приемки спутниковых сигналов 2, предназначен для определения координат геодезических пунктов (знаков), определение которых происходит путем зависания роботизированного коптера над пунктом съемочной сети (точки) 8, расположенной на поверхности Земли 9 с помощью подъемно-несущих винтов 3 для управления полетом роботизированного коптера, при участии черно-белой или цветной видеокамеры 4 визуального управления полетом и наведением лазерного луча с помощью лазерного устройства 5, установленного в блок подвески с позиционными стабилизаторами в нижней части роботизированного коптера точно под геометрической осью антенны, на марку пункта съемочной сети (точки) 8. Роботизированный коптер таким образом удерживают над целью, например в течение 5-7 минут, что позволяет оператору снять координаты с поверхности Земли 9 с высокой точностью.
Предлагаемый новый роботизированный способ позволяет полностью исключить использование дорогостоящих, трудоемких и трудозатратных работ с использованием современных геодезических приборов, прокладку визирок и т.п., что затрудняет выполнение геодезических задач современными способами.
Применение возможностей лазерного устройства в геодезических работах по развитию опорно-межевых сетей, а именно в предлагаемом данном комплексе позволяет выйти совершенно на новый уровень производства геодезических работ с использованием новых технических разработок и инновационных внедрений, резко сократить стоимость работ, сроки выполнения, трудозатраты и их емкость, исключить использование дорогостоящих геодезических приборов, сократить количество исполнителей, увеличить объемы выполняемых работ.
Применение данного устройства, установленного на роботизированном коптере, позволяет оператору, находясь в салоне автомобиля (помещении или других условиях), с помощью компьютера в реальном масштабе времени получать координаты пунктов геодезической или съемочной сети или выводить исполнителя на точку закладки пункта, или сети, или иных работ по ранее внесенным планируемым координатным данным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МЕЖЕВАНИЯ И/ИЛИ АКТУАЛИЗАЦИИ КАРТ ТЕРРИТОРИИ | 2003 |
|
RU2249179C1 |
| Ракета с пространственным ограничением траектории полета | 2022 |
|
RU2788218C1 |
| СПОСОБ ПРИМЕНЕНИЯ РОБОТИЗИРОВАННОГО ТАХЕОМЕТРА И БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНОГО ОБЪЕКТА | 2023 |
|
RU2809177C1 |
| СПОСОБ АКТУАЛИЗАЦИИ ВЫСОТНЫХ ПАРАМЕТРОВ В ЛОКАЛЬНОЙ ОБЛАСТИ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2737386C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |
| СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ ТОПОГРАФИЧЕСКОЙ СЪЕМКИ ДОРОЖНОГО ПОЛОТНА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ТОПОГРАФИЧЕСКОЙ СЪЕМКИ | 2000 |
|
RU2165595C1 |
| Способ определения пространственных координат и углового положения удаленного объекта | 2018 |
|
RU2681836C1 |
| Способ мониторинга дорожного полотна автомобильных дорог | 2021 |
|
RU2762538C1 |
| СПОСОБ АКТУАЛИЗАЦИИ ВЫСОТНО-ГРАВИМЕТРИЧЕСКИХ ПАРАМЕТРОВ В ЛОКАЛЬНОЙ ОБЛАСТИ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2021 |
|
RU2759499C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
Изобретение относится к области геодезии для межевания и определения границ земельных участков, в частности для создания геодезических сетей различного назначения на основе использования системы спутниковой навигации. Технический результат - автоматизация создания геодезических сетей. Для этого дополнительно устанавливают лазерное устройство в блок подвески с позиционными стабилизаторами в нижней части роботизированного коптера точно под геометрической осью антенны, например с DGPS (Глонасс, Галилео) приемником, рядом располагают видеокамеру, позволяющую оператору визуально наводить с помощью горизонтального перемещения роботизированного коптера проектируемый лазерный луч на середину геодезической марки и удерживать роботизированный коптер в течение короткого промежутка времени в этом положении до установки DGPS приемником точности своего пространственного положения, затем запоминают координаты данной точки центрирования и последовательно перемещают роботизированный коптер по обследуемому участку (точкам), снимая координаты всех необходимых пунктов. 2 з.п. ф-лы, 1 ил.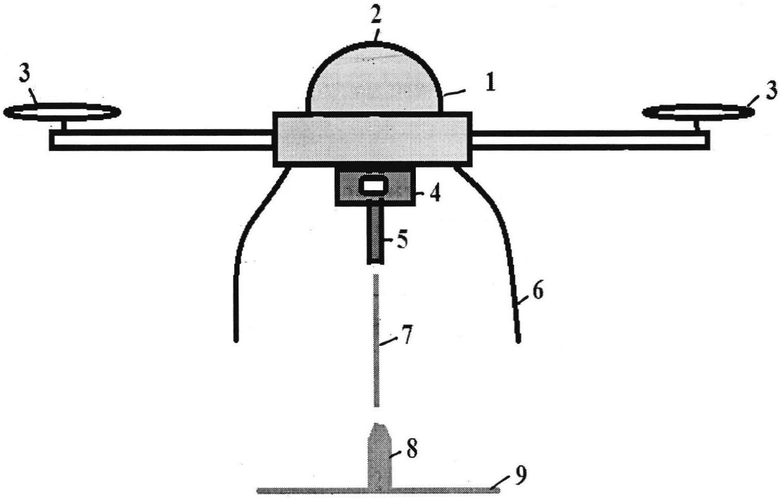
1. Способ определения точек геодезических координат с помощью лазерного устройства, установленного на роботизированном коптере с DGPS приемником, путем перемещения спутниковой станции с приемником с точки наблюдения на точку в радиусе действия базовой станции с получением координат определяемых точек, отличающийся тем, что устанавливают лазерное устройство в блок подвески с позиционными стабилизаторами в нижней части роботизированного коптера точно под геометрической осью антенны, например с DGPS (Глонасс, Галилео) приемником, рядом располагают видеокамеру, позволяющую оператору визуально наводить с помощью горизонтального перемещения роботизированного коптера проектируемый лазерный луч на середину геодезической марки и удерживать роботизированный коптер в течение короткого промежутка времени, например от 5 до 10 минут, в этом положении до установки DGPS приемником точности своего пространственного положения, затем нажатием соответствующей клавиши на компьютере запоминают координаты данной точки центрирования и последовательно перемещают роботизированный коптер по обследуемому участку (точкам), снимая координаты всех необходимых пунктов.
2. Способ по п. 1, отличающийся тем, что грубые координаты искомых пунктов по заранее установленной системе пространственных координат в камеральных условиях вводят в полетное задание, например при прокладке маршрута, сокращая время на поиск пунктов (точек) для их определения.
3. Способ по п. 1, отличающийся тем, что при закладке пунктов (точек) по имеющимся данным координаты вводят из каталогов или других источников в полетное задание, направляя коптер в искомую точку, который зависает над ней, при этом исполнитель закладывает в точку проектируемого луча с помощью лазерного устройства марку или репер.
| СПОСОБ ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ОТНОСИТЕЛЬНЫХ ОПРЕДЕЛЕНИЙ ПАРАМЕТРОВ | 2011 |
|
RU2469273C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ КООРДИНАТ ОБЪЕКТА | 2005 |
|
RU2292526C1 |
| Морозов В.П | |||
| Курс сфероидической геодезии | |||
| - М.: Недра, 1979, с.196-197 | |||
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |

