Изобретение относится к измерительной технике для топографической съемки с использованием GPS-сигналов, данные которой могут быть использованы при реконструкции и ремонте дорог, взлетно-посадочных полос и т.п., а также могут найти применение при паспортизации, инвентаризации или составлении кадастра автодорог.
До недавнего времени для выполнения топографических съемок поверхностей дорог использовались механические приборы, такие как геодезические инструменты. Для определения плана и продольного профиля трассы применялись топографические съемки и нивелирование поверхностей. Данные, полученные с помощью этой техники, основаны на визуальных измерениях и, следовательно, обладают невысокой точностью. Кроме того, они трудоемки и требуют много времени на выполнение.
Известны более совершенные - автоматизированные способы проведения съемок дорожного полотна. Например, в патенте США N 5075772, H 04 N 007/18, H 04 N 005/84, опубл. 24.12.91, описан способ, заключающийся в том, что на дорожное полотно дискретно равномерно наносятся пятна краски или металлические метки, относительно которых затем проводится съемка поверхности с помощью полевой установки - съемочного автомобиля, на котором в определенных положениях закреплено съемочное оборудование, включающее видеокамеры и измерительные приборы, основанные на инфракрасной или ультрафиолетовой радиации (в зависимости от вида краски пятен), или электромагнитные датчики для детектирования металлических пятен. Измеренные данные запасаются в цифровом виде или в виде мониторных изображений на магнитных лентах. Однако съемка с помощью таких приборов по пятнам не может дать сантиметровую точность измерений, необходимую для проведения микропрофилирования покрытий дорог.
С установлением Соединенными Штатами Америки серии спутников Глобальной Системы Местоопределения (Global Positioning System - GPS), позволяющей определять местонахождение конкретной точки на земле с относительно большой точностью (стандартный приемник GPS способен определять положение с точностью менее 1 м), появились топографические устройства, определяющие продольные и поперечные профили автодорог в Х-У-Z координатах с помощью спутниковых сигналов (например, патент США N 5721685, опубл. 24.02.98, G 01 В 11/30, E 01 C 19/00). Устройство по данному патенту представляет собой полевую установку в виде автомобиля, на котором спереди или сзади крепится на высоте 1 метра от поверхности сенсорная панель с размещенными на ней двумя GPS-приемниками, установленными по концам панели, а также несколько датчиков (ультразвуковых или инфракрасных), установленных между GPS-приемниками для измерения расстояния до поверхности дороги под прямыми углами к ней. Установка содержит также бортовой компьютер, соединенный с GPS-приемниками и датчиками проводной связью, установленный в автомобиле, где также помещены видеокамера и устройство измерения дистанции, производящее инициализацию. Передача цифровой информации с GPS-приемников и датчиков на бортовой компьютер производится через определенные промежутки времени. Первичные данные съемки передаются в офисный компьютер для постобработки и перевода в программный продукт - X, Y, Z-файлы. В этом устройстве повышение точности измерений достигается за счет использования большого количества ультразвуковых или других датчиков (от 4 до 9 датчиков в разных вариантах использования), что не может не сказаться на стоимости установки.
Наиболее близкой к предлагаемому изобретению является система, включающая систему спутников GPS, подвижное роверное устройство, выполненное в виде двухколесной тележки с установленной на ней платформой на высоте 3 м, на которой помещена антенна и под которой установлены: 12-канальный GPS-приемник, система счисления пути (включающая колесные кодеры, датчик ориентации и потенциометр вращения), система цифровых видеокамер переднего, бокового и заднего обзора (всего 7 камер) и бортовой компьютер. Роверное устройство подсоединено штангой к трактору, который выполняет перемещение устройства по дорожному полотну. Система включает также второй GPS-приемник, помещенный стационарно на пункте с известными координатами. Считывание данных производится при одновременном наблюдении 4 спутников, при этом считывание данных относительного положения (т. е. плана) производится от трех спутников и данных временной базы - от четвертого. В ходе съемки осуществляется считывание фазовой информации, дополняемой информацией счисления пути и цифровой информацией видеообзора. Информация передается в блок постобработки на стационарный компьютер, который преобразует выходную информацию в электронную форму (дискеты, файлы). Точность определений данной системой составляет до 1 см для стационарного GPS-приемника и до 5 см - для передвижного GPS-приемника [1].
Однако в данной системе считывание фазовой информации производится при одновременном наблюдении всего 4 спутников. Это означает, что данная система может снимать лишь плановую (в координатах X, Y) информацию и не может выполнять привязку к измерению высот (H). Кроме того, фазовая информация в этой системе является лишь дополнительной к расчетным данным, следовательно, измерение одной фазовой информации не сможет обеспечить указанную точность.
Для получения полных расчетных данных съемочное устройство имеет сложное аппаратурное исполнение. К тому же помещение всей измерительной аппаратуры на двухколесной тележке роверного устройства создает возможность механических и погодных воздействий на нее.
Таким образом, задачей предлагаемого изобретения является значительное упрощение устройства, используемого в системе для проведения топографической съемки с помощью сигналов GPS, и в то же время сохранение высокой точности при проведении фазовых измерений в координатах X, Y, H.
Поставленная задача достигается тем, что в системе для проведения топографической съемки дорожной поверхности, содержащей: созвездие спутников GPS; передвижной GPS-приемник; устройство, несущее антенну передвижного GPS-приемника; транспортное средство для перемещения GPS-приемника и устройства, несущего антенну; средство для крепления устройства, несущего антенну, к транспортному средству; второй GPS-приемник, помещенный стационарно на пункте с известными координатами; и блок постобработки данных съемки, включающий стационарный компьютер, предлагается устройство, несущее антенну, выполнить в виде одного колеса, на котором размещено средство крепления антенны, позволяющее выставлять антенну в вертикальное положение на точке инициализации; передвижной GPS-приемник поместить в транспортное средство, а также с созвездием спутников GPS дополнительно использовать созвездие спутников ГЛОНАСС (Глобальной навигационной спутниковой системы).
При этом средство крепления антенны выполнено в виде вехи, размещенной в гнезде, закрепляемом на колесе. А устройство, несущее антенну передвижного GPS-приемника, выполнено с возможностью его закрепления с левой или правой стороны транспортного средства в пределах до 0,5 м за его габарит, для обеспечения возможности совмещения фазового центра антенны со структурной линией дорожной поверхности.
Кроме того, средство крепления устройства, несущего антенну, к транспортному средству выполнено в виде системы штанг, закрепляемых на транспортном средстве, и соединенной с системой штанг крепежной рамы в форме треугольника, один из концов которого выдвинут в пределах до 0,5 м влево или вправо за габарит транспортного средства и является местом крепления устройства, несущего антенну.
Во втором варианте выполнения системы, также содержащей: созвездие спутников GPS; передвижной GPS-приемник; устройство, несущее антенну передвижного GPS-приемника; транспортное средство для перемещения GPS-приемника и устройства, несущего антенну; средство для крепления устройства, несущего антенну, к транспортному средству; второй GPS-приемник, помещенный стационарно на пункте с известными координатами; и блок постобработки данных съемки, включающий стационарный компьютер, предлагается: средство крепления устройства, несущего антенну, к транспортному средству разместить на крышке транспортного средства, а устройство, несущее антенну, выполнить в виде поворотной подвески коленчатой формы, конец одного колена которой размещен с возможностью поворота на крыше на средстве крепления данного устройства, а конец другого колена которой несет антенну; передвижной GPS-приемник поместить в транспортное средство, и с созвездием спутников GPS дополнительно использовать созвездие спутников ГЛОНАСС.
При этом поворотная подвеска выполнена с возможностью выдвижения в пределах до 0,5 м влево или вправо за габарит транспортного средства для обеспечения возможности совмещения фазового центра антенны и снимаемой структурной линии.
А также для обоих вариантов характерно, что в качестве транспортного средства использован автомобиль и в нем дополнительно помещен контроллер, а также, что каждый GPS-приемник дополнительно имеет каналы ГЛОНАСС.
Цель достигается также тем, что при проведении способа топографической съемки, включающего операции: инициализацию передвижного GPS-приемника и съемку точек структурных линий поверхности в координатах плана X, Y путем дискретного считывания информации от спутников GPS, определяющих положение фазового центра антенны GPS-приемника, накопления первичной информации, передачи ее для постобработки в стационарный компьютер, в который направляют также данные со стационарного GPS-приемника с пункта с известными координатами, и дифференциальной обработки информации в стационарном компьютере с помощью программного обеспечения с выводом выходной информации в электронную форму, предлагается способ выполнять с помощью вышеописанного устройства, при этом съемку выполняют с учетом также высот H точек структурных линий, считывание информации ведут дополнительно от спутников ГЛОНАСС, при этом одновременно наблюдают не менее 5 спутников, а также при продольных и поперечных наклонах антенны, обусловленных профилем поверхности, и соответствующих смещениях ее фазового центра в программное обеспечение вводят подпрограммы учета смещения фазового центра антенны в два этапа: на одном этапе определяют продольный уклон поверхности для каждой точки структурной линии, учитывают, что продольный наклон антенны равен продольному уклону поверхности, и вводят подпрограмму поправки в определение высот H снимаемых точек, на другом этапе определяют поперечный уклон поверхности для каждой точки структурной линии, сравнивают его с уклоном в точке инициализации, учитывают, что алгебраическая разность сравниваемого и исходного уклонов поверхности есть угол наклона антенны в данной точке, и вводят подпрограмму поправки в определение координат X, Y снимаемых точек.
При съемке фазовой информации через спутниковую систему в кинематическом режиме необходимо сохранять фазу несущей частоты, т.е. требуется "видеть" как можно большее число спутников. Если при съемке происходит потеря фазы несущей частоты, измерения прекращаются. Для продолжения работ необходимо отключать аппаратуру и снова производить инициализацию. С целью предотвращения потери фазы несущей частоты по данному изобретению используется не только созвездие американской спутниковой системы - GPS, но и российской спутниковой системы ГЛОНАСС, вдвое увеличивающей общее число спутников. А в аппаратурном исполнении применяемые GPS-приемники имеют 12 каналов GPS с кодом и фазой несущей на частоте L1 и 12 каналов ГЛОНАСС с кодом и фазой несущей на частоте L1, что дает возможность "видеть" одновременно не менее 5 спутников и проводить измерения в координатах X, Y, H непрерывно (при отсутствии препятствий).
Выполнение устройства, несущего антенну, с размещением вехи с антенной непосредственно на отдельном колесе (так называемом "пятом" колесе автомобиля) предназначено для съемки преимущественно фиксированных (имеющих покрытие) поверхностей. В данном случае колесо, несущее антенну, выполняет роль копирного колеса на снимаемой структурной линии. При размещении оси копирного колеса на структурной линии в точке инициализации веха с антенной устанавливается в вертикальное положение и позволяет навести фазовый центр антенны непосредственно на структурную линию, что дает возможность более точно считывать точки поверхности в ходе съемки с помощью GPS-примника и спутниковой системы.
Закрепление колеса, несущего антенну, как с левой, так и с правой стороны транспортного средства (автомобиля) дает возможность выполнять съемку как кромки, так и оси покрытий при движении автомобиля в соответствии с Правилами дорожного движения: т.е. по правой полосе движения.
Второй вариант выполнения устройства с размещением вехи с антенной на подвеске, закрепляемой на крыше автомобиля, предназначен для проведения съемок преимущественно нефиксированных поверхностей (верха земляного полотна, бровок, кромок автодорог с переходным типом покрытия и т.п.), при этом подвеска антенны позволяет устанавливать ее так, что фазовый центр антенны находится непосредственно над снимаемой структурной линией поверхности. Подвеска автомобиля в ходе съемки усредняет снимаемую поверхность и дает более точное ее представление. Выдвижение подвески антенны за габарит автомобиля позволяет увеличить ширину снимаемой поверхности, а поворот ее за любой габарит автомобиля позволяет проводить съемку с обеих сторон автомобиля. Т.о. конструкция устройства, несущего антенну, в обоих вариантах позволяет размещать антенну непосредственно над снимаемой структурной линией и точно наводить на эту линию ее фазовый центр, что дает возможность проводить измерения не только в координатах X, Y (т.е. фиксировать плановое положение), но и снимать высоты Н точек структурных линий. В сочетании с возможностью считывания информации от более 5 спутников одновременно получают более точное представление снимаемой структурной линии в координатах X, Y, Н.
Размещение измерительной аппаратуры в автомобиле исключает влияние механических и погодных воздействий на нее, что также влияет на повышение точности измерений. А использование в составе аппаратуры контроллера (например, типа Hushy), управляющего процессом съемки и задающего режим ее проведения: длину эпохи измерений, присвоение имен снимаемым точкам и др., позволяет автоматизировать процесс проведения съемки и повысить точность измерений.
Выполнение способа, включающего передачу данных съемки с передвижного GPS-приемника в стационарный компьютер и их камеральную обработку (с учетом данных стационарного GPS-приемника) с помощью штатного программного обеспечения WinPrizm, в которое вводятся подпрограммы поправок, учитывающих влияние продольных и поперечных наклонов антенны при расчете плановых координат X, Y и высот H, также направлено на повышение точности измерений.
В результате, с учетом того что паспортная точность применяемого для съемки комплекта двух приемников GG24 Ashtech (GPS + ГЛОНАСС) при определении координат фазового центра антенны составляет среднюю квадратичную ошибку:
в статике - расстояний ± (10 мм + 1 ppm · d),
превышений ± (17 мм + 1,7 ppm · d),
в кинематике - расстояний ± (15 мм + 1 ppm · d),
превышений ± (22 мм + 1,7 ppm · d),
где d - измеряемое расстояние в км, ppm = 1 · 10-6, точность предлагаемой системы и способа, которая в основном зависит от точности наведения фазового центра антенны на структурную линию, составляет ± 5 см в плане и ± 25 мм по высоте, что значительно превышает требования СНиП в части топографических съемок автодорог на стадии изысканий для рабочего проекта; ± 20 см в плане и ± 6 см по высоте.
Сущность изобретения поясняется прилагаемыми чертежами:
фиг. 1 - блок-схема предлагаемой системы;
фиг. 2 - вид сбоку устройства, несущего антенну, прикрепленного к автомобилю;
фиг. 3 - вид сверху устройства, несущего антенну, прикрепленного к автомобилю;
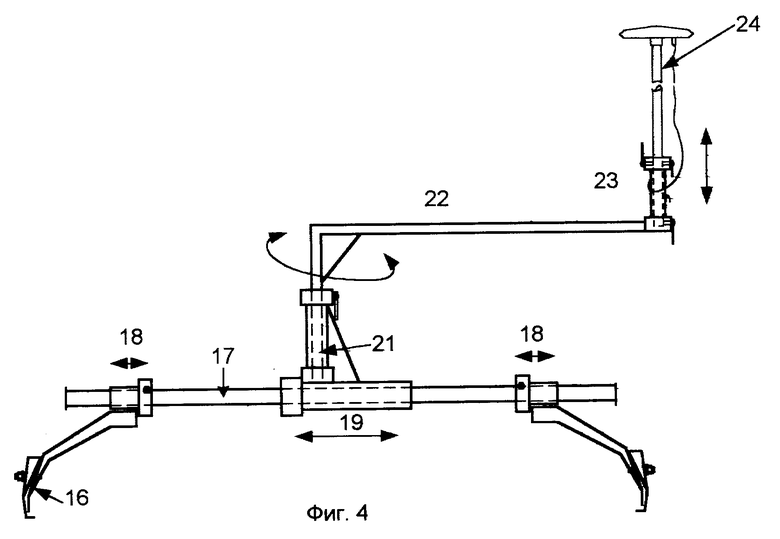
фиг. 4 - торцевой вид устройства крепления подвески с антенной на крыше автомобиля;
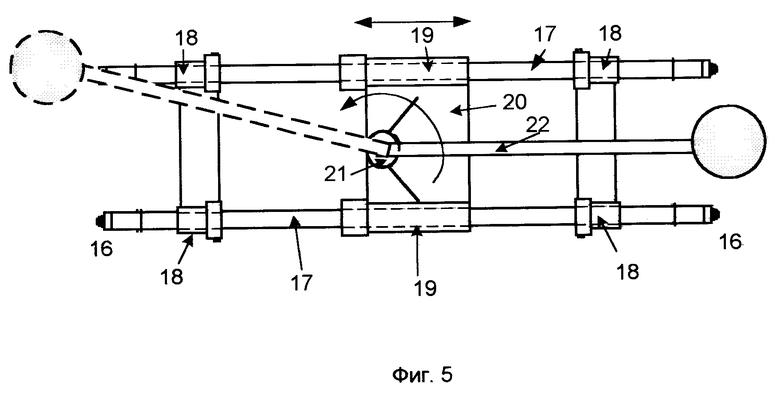
фиг. 5 - вид сверху устройства крепления подвески с антенной на крыше автомобиля.
Общая схема системы для выполнения топографической съемки показана на фиг. 1. Система имеет созвездие спутников 1, включающее спутники системы GPS и системы ГЛОНАСС, сигналы с которых поступают на антенну 2, связанную с GPS-приемником 3, который в свою очередь связан с контроллером 4. Данные изменений GPS-приемника 3 поступают в блок постобработки на стационарный компьютер 5, в который также поступают данные с GPS-приемника 6, установленного стационарно на базовой станции и имеющего информацию с известными координатными данными X, Y, H от Государственной геодезической станции. Антенна GPS-приемника 6 базовой станции также имеет связь со спутниками 1.
Устройство для выполнения топографической съемки в качестве примерного исполнения показано на фиг. 2 и 3. Подвижное устройство, несущее антенну 2 передвижного GPS-приемника 3, выполнено в виде одного колеса 7, на держателе которого размещено средство крепления антенны в виде соединительного устройства 8 для крепления втулки 9, выполняющей роль гнезда, в котором размещается и настраивается в вертикальное положение веха 10 с антенной. Устройство, несущее антенну, через посредство соединительного устройства 8 крепится к одному концу треугольной крепежной рамы 11, которая выполнена с возможностью установки данного конца (и, следовательно, устройства, несущего антенну) в левое или в правое положение за габарит автомобиля. Одна неподвижная сторона 12 крепежной рамы 11 жестко крепится к двум вертикальным штангам 13, соединенным под прямыми углами с верхними горизонтальными штангами 14, закрепленными на устройстве 15 крепления на крышке автомобиля. Вертикальные штанги 13 внизу съемно крепятся к буксировочным петлям автомобиля. Антенна 2 имеет проводную связь с GPS-приемником 3, размещенным в автомобиле и связанным с контроллером 4. Данное съемочное устройство выполнено разборным. После разборки все его составные части помещаются в тот же автомобиль, который используется для съемки, для транспортировки к новому участку работы. Время сборки устройства около 20 минут.
На фиг. 4 и 5 показан второй вариант конструкции и крепления устройства, несущего антенну GPS-приемника 3, - на крыше автомобиля. Устройство 15 крепления, размещаемое в поперечном направлении на крыше автомобиля, например, на его водостоках, содержит две пары крепежных скоб 16, закрепляемых с противоположных сторон крыши. Каждая пара скоб 16 крепится с двух сторон к одной их двух направляющих 17 с помощью зажимных муфт 18, позволяющих изменять расстояние между парой скоб 16. На каждой из направляющих 17 между муфтами 18 размещена зажимная муфта 19. Между муфтами 19, в поперечном направлении от направляющих 17 размещена жесткая пластина 20, на которой вертикально закреплена втулка 21, служащая гнездом для размещения одного конца поворотной подвески 22, имеющей коленчатую форму. На втором конце поворотной подвески в положении вертикально вверх размещена втулка 23, служащая гнездом для размещения вехи 24 с антенной. Антенна имеет проводную связь с GPS-приемником 3, связанным с контроллером 4, помещенными в автомобиле. Данный вариант съемочного устройства выполнен также разборным и помещается в автомобиле при перемещении до объекта работ и обратно. Время сборки ≈ 10 мин.
Топографическая съемка выполняется следующим образом.
Для проведения съемочных работ используется комплект автономного спутникового определения координат X, Y, H - GG24 Ashtech, который работает с двумя системами спутников: GPS и ГЛОНАСС. В качестве транспортного средства использован автомобиль.
При выполнении съемки фиксированных поверхностей (цементобетонных, асфальтобетонных покрытий автодорог и аэродромов) используется устройство с креплением антенны на "пятом" колесе автомобиля. На точке инициализации, выбираемой на поверхности с продольным уклоном, близким к нулю, продольная ось копирного колеса устанавливается на структурную линию (кромку, ось покрытия), веха с антенной выставляется вертикально на высоте ≈ 3 м для избежания помех от движущегося транспорта. Измеряется поперечный уклон покрытия, на котором в данное время находится автомобиль.
До этого стационарный GPS-приемник устанавливается на пункте, имеющем координаты X, Y, H в заданной системе координат. После измерения высоты фазового центра антенны и выполнения инициализации измерительной аппаратуры автомобиль начинает движение таким образом, чтобы ось копирного колеса находилась над снимаемой структурной линией. Съемка производится дискретно в кинематическом режиме. В зависимости от требуемой дискретности выбирается длина эпохи кинематических измерений и скорость движения автомобиля. Так, при длине эпохи измерений 2 секунды и скорости 40 км/ч дискретность составляет 20 м.
При необходимости фиксации встречающихся элементов ситуации (начало-конец ограждений, дорожные знаки, пикетаж и т.д.) выполняется остановка, точное наведение антенны. Название структурных линий в элементов ситуации задается с контроллера.
После завершения съемки одной структурной линии положение антенны при необходимости перестраивается для съемки следующей линии.
В процессе съемки с контроллера необходимо следить, чтобы одновременно в зоне видимости антенны находилось как минимум пять спутников, в противном случае происходит потеря фазы несущей частоты, после чего необходимо выключить приемник и заново выполнить инициализацию. Завершаются кинематические наблюдения на статической точке.
Другой разновидностью выполнения устройства на колесе является размещение вехи с антенной на полевом курвиметре, перемещаемом рядом вручную. Такое устройство используется для съемки структурных линий сложной конфигурации, например кромки асфальтобетонного покрытия в городской черте, имеющего повороты под 90 градусов без закруглений, или в случаях, когда требуется дискретность 1-3 м.
Топографическая съемка нефиксированных поверхностей (бровок земляного полотна, кромок и оси щебеночного или песчано-гравийного покрытия автодорог) выполняется следующим образом: антенна устройства на подвеске, закрепленной на крыше автомобиля на высоте ≈ 3 м от поверхности дороги, устанавливается таким образом, чтобы ее фазовый центр находился над снимаемой структурной линией. Далее измерения выполняются аналогично съемке фиксированных поверхностей.
Обработка результатов измерений выполняется в штатном программном обеспечении WinPrizm, куда переписываются файлы измерений с базового и подвижного приемника. Результатом обработки является файл координат и высот кинематических и статических точек, который экспортируется в одну из САПР, где строится и оценивается цифровая модель снятой поверхности.
В процессе движения, из-за непостоянства продольных и поперечных уклонов покрытия, антенна получает продольные и поперечные наклоны. Продольный наклон не влияет на плановое положение, так как фазовый центр смещается вдоль структурной линии, но дает значительное приращение высоте антенны. Поперечный наклон смещает фазовый центр в плане и почти не влияет на высоту антенны. В связи с этим, полученные в WinPrizm дискретные координаты и высоты структурных линий исправляются в созданном программном обеспечении "GPS поправки", которое на первом этапе анализирует продольный уклон поверхности для каждой точки конкретной структурной линии, принимает, что продольный наклон антенны равен продольному уклону поверхности, и вводит поправки в высоты определяемых точек. На втором этапе для каждой точки определяется поперечный уклон поверхности. Исходными данными для вычисления поперечного уклона являются результаты WinPrizm по соседним структурным линиям. Вычисленный поперечный уклон сравнивается с измеренным на точке инициализации, на котором антенна была выставлена вертикально. Принимается, что алгебраическая разность текущего и исходного уклонов поверхности есть угол наклона антенны в данной точке, после чего в координаты вводятся соответствующие поправки.
Исправленные координаты и высоты точек всех снятых структурных линий передаются в САПР. Полученные прямоугольные координаты конвертируются в широко известный программный комплекс КРЕДО-ДИАЛОГ, где по материалам съемки строится цифровая модель местности по существующему покрытию, выполняется трассирование, определяются координаты углов поворота трассы, радиусы вертикальных и горизонтальных закруглений и их вид (круговая, круговая с переходной, клотоидная), разбивается пикетаж, оценивается план трассы, продольный и поперечные профили, выполняется микропрофилирование - намечаются мероприятия по исправлению продольного и поперечных профилей покрытия, вычисляются объемы выравнивающих слоев.
В дальнейшем, после выполнения ремонта или реконструкции автодороги, аналогично выполняется исполнительная съемка, оценивается качество строительных работ, включая ровность покрытия, фактический объем уложенных слоев - как пространство между двух поверхностей. Материалы съемки и проектные данные можно конвертировать в геоинформационную систему, например в MapInfo.
Применение данного метода позволяет увеличить производительность труда в зависимости от конкретных условий в 20-30 раз по сравнению с традиционными инструментальными методами.
Используемая литература.
1. Патент США N 5517419, МПК кл. С 01 С 7/04, от 14.05.96.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2205417C2 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| АВТОМОБИЛЬНЫЙ ПРОТИВОУГОННЫЙ КОМПЛЕКС С ОПРЕДЕЛЕНИЕМ ГЕОГРАФИЧЕСКИХ КООРДИНАТ | 2006 |
|
RU2333853C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ НА ОСНОВЕ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ GPS/GLONASS | 2009 |
|
RU2419103C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2480791C2 |
| МАЛОГАБАРИТНАЯ НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2613342C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНОГО ТЕРМИНАЛА ВНУТРИ ЗДАНИЙ НА ОСНОВЕ ГЛОНАСС-ПОДОБНОГО СИГНАЛА | 2012 |
|
RU2533202C2 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ПАК ВТП ТС) | 2022 |
|
RU2803992C1 |
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
Изобретение относится к измерительной технике для топографической съемки, данные которой могут быть использованы при ремонте и реконструкции дорог, взлетно-посадочных полос и т.п. Сущность: система содержит созвездия спутников GPS и ГЛОНАСС, передвижной GPS-приемник и устройство, несущее его антенну, перемещаемые с помощью транспортного средства (автомобиля), а также второй стационарный GPS-приемник на пункте с известными координатами и стационарный компьютер для постобработки данных, в которой устройство, несущее антенну, выполнено в виде одного колеса, на котором размещено средство крепления антенны в виде вехи, размещенной в гнезде, закрепленном на колесе, при этом передвижной GPS-приемник помещен в транспортное средство. Во втором варианте устройство, несущее антенну передвижного GPS-приемника, размещено на крыше транспортного средства и выполнено в виде поворотной подвески коленчатой формы. Способ выполнения топографической съемки включает инициализацию измерительной аппаратуры и съемку точек структурных линий поверхности в координатах X, Y, H путем дискретного считывания информации от спутников GPS и ГЛОНАСС, при одновременном наблюдении не менее 5 спутников, определяющих положение фазового центра антенны GPS-приемника, передачи первичной информации в стационарный компьютер, в который направляют также данные со стационарного GPS-приемника, помещенного на пункте с известными координатами, и дифференциальной обработки информации в стационарном компьютере с помощью программного обеспечения, в которое вводят подпрограммы поправок, учитывающих смещения фазового центра антенны в ходе съемки как в плановых X, Y координатах, так и по высоте H. Выходную информацию выводят в электронной форме. Технический результат: упрощение конструкции устройства для топографической съемки и обеспечение высокой точности съемки в координатах X, Y, H (± 5 см в плане и ± 0,25 см по высоте). 3 с. и 10 з.п. ф-лы, 5 ил.
| US 5517419 A, 14.05.1996 | |||
| US 5721685 A, 24.02.1998 | |||
| US 5936572 A, 10.08.1999 | |||
| US 5914685 A, 22.06.1999 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КОПАЮЩЕГО ПРИСПОСОБЛЕНИЯ (ВАРИАНТЫ) И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОЧЕЙ МАШИНЫ НА РАБОЧЕЙ ПЛОЩАДКЕ (ВАРИАНТЫ) | 1995 |
|
RU2134329C1 |
| СПОСОБ ИНЖЕНЕРНЫХ ГРУНТОВО-ГИДРОЛОГИЧЕСКИХ ИЗЫСКАНИЙ АВТОМОБИЛЬНЫХ ДОРОГ | 1996 |
|
RU2109872C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |

