Область техники
Настоящее изобретение относится к системе привода для транспортного средства.
Уровень техники
Традиционно известно транспортное средство, включающее в себя множество электродвигателей. Например, патентный документ 1 раскрывает технологию максимизации рабочего диапазона гибридного автомобиля, который включает в себя две электрических машины и который работает в рабочем состоянии электромобиля. Патентный документ 1 раскрывает технологию, при которой автомобиль двигается, когда две электрические машины формируют тяговый крутящий момент.
Патентный документ
Патентный документ 1: US 2008/0125928 A
Задача, решаемая изобретением
Во время работы с двумя электродвигателями, соединенными с дифференциальным механизмом, в качестве источника мощности, способ управления, при котором степень свободы в работе каждого электродвигателя является более высокой, не был достаточно изучен традиционным образом. Например, предпочтительно, чтобы эффективность была улучшена, когда соотношение разделения полезной отдачи двух электродвигателей или степень свободы в выборе их рабочей точки является высокой.
Задачей настоящего изобретения является создание системы привода для транспортного средства, которое может улучшать эффективность во время движения с двумя электродвигателями, соединенными с дифференциальным механизмом, в качестве источника мощности.
Решение задачи
Согласно настоящему изобретению создана система привода для транспортного средства, включающая в себя: первый электродвигатель; второй электродвигатель; и дифференциальный механизм, который включает в себя первый вращающийся элемент, соединенный с первым электродвигателем, второй вращающийся элемент, соединенный со вторым электродвигателем, и третий вращающийся элемент, соединенный с ведущими колесами, при этом первый вращающийся элемент и второй вращающийся элемент расположены на противоположных сторонах с третьим вращающимся элементом, вставленным между ними в коллинеарной схеме дифференциального механизма, и область, которая не может быть выбрана в качестве целевого параметра управления, определяется в диапазоне параметра управления, который может быть выведен одним электродвигателем из первого электродвигателя и второго электродвигателя.
В системе привода для транспортного средства предпочтительно, чтобы область, которая не имеет возможности быть выбранной в качестве целевого параметра управления, определялась как две или более областей, и определенные области являются дискретными.
В системе привода для транспортного средства предпочтительно, чтобы параметр управления, который имеет возможность быть выбранным в качестве целевого параметра управления одного электродвигателя, определялся как две или более дискретных точек в диапазоне параметра управления, который имеет возможность быть выведенным посредством одного электродвигателя.
В системе привода для транспортного средства предпочтительно, чтобы целевой параметр управления другого электродвигателя был определен, чтобы реализовать запрошенную полезную отдачу транспортного средства.
В системе привода для транспортного средства, предпочтительно, чтобы изменение в параметре управления одного электродвигателя из первого электродвигателя и второго электродвигателя было запрещено, в то время как изменяется параметр управления другого электродвигателя.
В системе привода для транспортного средства предпочтительно, чтобы параметр управления одного электродвигателя изменялся в целевой параметр управления раньше параметра управления другого электродвигателя на основе запрошенной полезной отдачи транспортного средства.
В системе привода для транспортного средства предпочтительно, чтобы параметр управления электродвигателя, имеющего меньшую инерцию из первого электродвигателя и второго электродвигателя, предпочтительно изменялся, когда запрос на ускорение предоставляется транспортному средству.
В системе привода для транспортного средства предпочтительно, чтобы первый электродвигатель и второй электродвигатель были вращательными электрическими машинами, и чтобы параметр управления электродвигателя, имеющего большую инерцию из первого электродвигателя и второго электродвигателя, предпочтительно изменялся, когда запрос на замедление предоставляется транспортному средству.
В системе привода для транспортного средства предпочтительно, чтобы первый электродвигатель и второй электродвигатель были вращательными электрическими машинами и чтобы, когда запрос на замедление предоставляется транспортному средству, параметр управления электродвигателя, имеющего большую инерцию из первого электродвигателя и второго электродвигателя, предпочтительно изменялся при высокой скорости транспортного средства, а параметр управления электродвигателя, имеющего меньшую инерцию из первого электродвигателя и второго электродвигателя, предпочтительно изменялся при низкой скорости транспортного средства.
В системе привода для транспортного средства параметр управления области, которая не имеет возможности быть выбранной в качестве целевого параметра управления из двух или более параметров управления одного электродвигателя, является, по меньшей мере, одним из крутящего момента или скорости вращения.
Преимущества изобретения
Система привода для транспортного средства согласно настоящему изобретению включает в себя первый электродвигатель, второй электродвигатель и дифференциальный механизм, который включает в себя первый вращающийся элемент, соединенный с первым электродвигателем, второй вращающийся элемент, соединенный со вторым электродвигателем, и третий вращающийся элемент, соединенный с ведущими колесами. В коллинеарной схеме дифференциального механизма первый вращающийся элемент и второй вращающийся элемент располагаются на противоположных сторонах с третьим вращающимся элементом, вставленным между ними. Область, которая не имеет возможности быть выбранной в качестве целевого параметра управления, определяется в диапазоне параметра управления, который имеет возможность быть выведенным посредством одного электродвигателя из первого электродвигателя и второго электродвигателя. Система привода для транспортного средства согласно настоящему изобретению может улучшать эффективность во время движения с двумя электродвигателями, соединенными с дифференциальным механизмом, в качестве источника мощности.
Краткое описание чертежей
Фиг. 1 - блок-схема последовательности операций, иллюстрирующая работу системы привода для транспортного средства согласно варианту осуществления настоящего изобретения;
Фиг. 2 - чертеж, схематично иллюстрирующий конфигурацию транспортного средства согласно варианту осуществления;
Фиг. 3 - схема, иллюстрирующая пример конфигурации планетарного зубчатого механизма и соединения с каждой вращательной электрической машиной;
Фиг. 4 - коллинеарная схема планетарного зубчатого механизма;
Фиг. 5 - схема, иллюстрирующая изображение работы каждого вращающегося элемента в системе привода для транспортного средства согласно варианту осуществления;
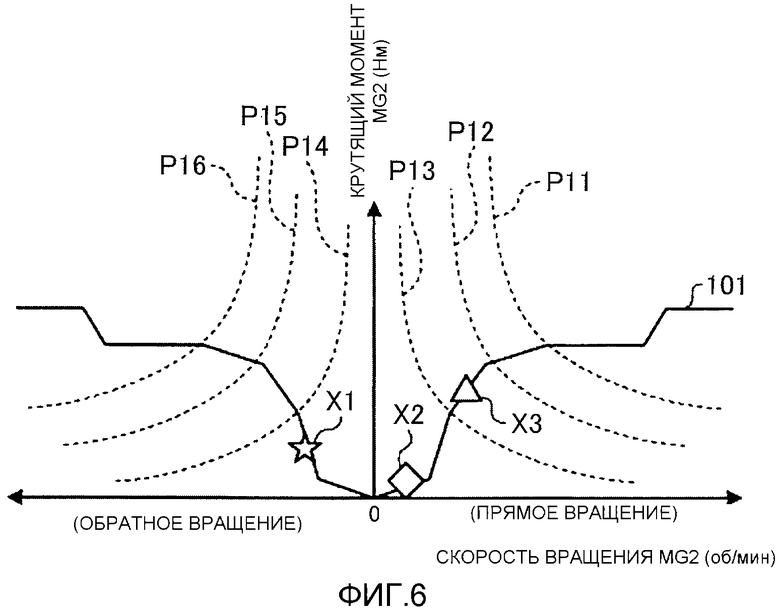
Фиг. 6 - схема, иллюстрирующая способ выбора рабочей точки второй вращательной электрической машины;
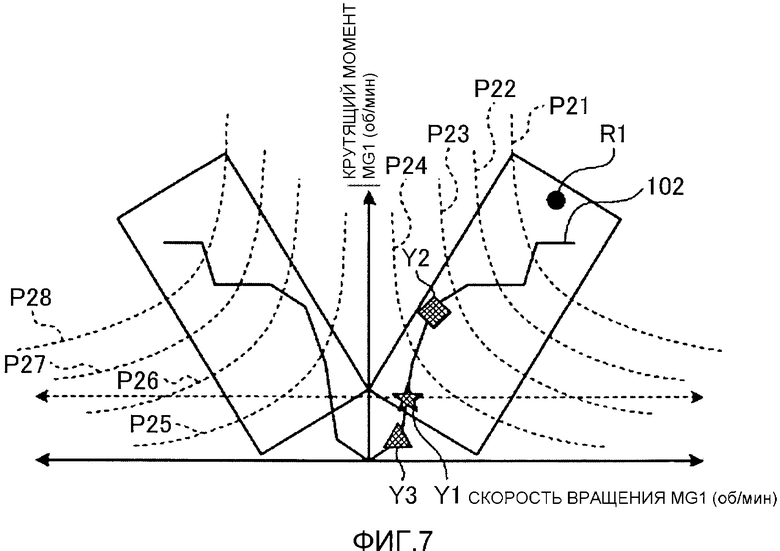
Фиг. 7 - схема, иллюстрирующая способ выбора рабочей точки первой вращательной электрической машины; и
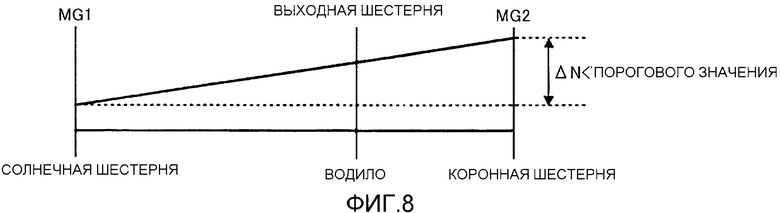
Фиг. 8 - схема, иллюстрирующая пороговое значение разности скоростей вращения.
Способы осуществления изобретения
Далее в данном документе система привода для транспортного средства согласно варианту осуществления настоящего изобретения будет описана со ссылкой на сопровождающие чертежи. Настоящее изобретение не ограничивается этим вариантом осуществления. Элементы описанного ниже варианта осуществления включают в себя элементы, которые могут быть легко предположены специалистами в области техники, или элементы, которые, по существу, эквивалентны друг другу.
Вариант осуществления изобретения
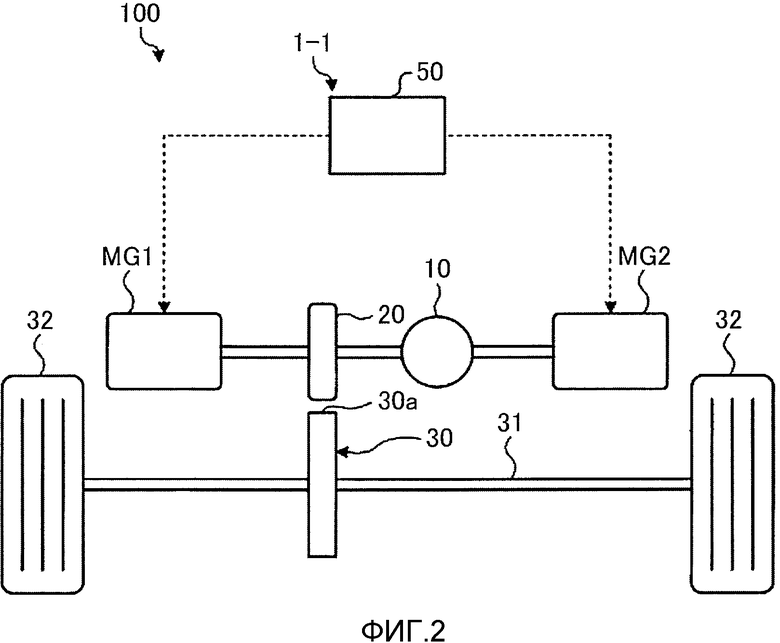
Вариант осуществления будет описан ниже со ссылкой на фиг. 1-7. Этот вариант осуществления относится к системе привода для транспортного средства. Фиг. 1 представляет собой блок-схему последовательности операций, иллюстрирующую работу системы привода для транспортного средства 1-1 согласно варианту осуществления настоящего изобретения, а фиг. 2 - чертеж, схематично иллюстрирующую конфигурацию транспортного средства 100 согласно варианту осуществления.
Транспортное средство 100, иллюстрированное на фиг. 2, включает в себя первую вращательную электрическую машину MG1, вторую вращательную электрическую машину MG2, планетарный зубчатый механизм 10, выходную шестерню 20, устройство 30 дифференциала, приводной вал 31, ведущие колеса 32 и ECU 50. Транспортное средство 100 является, например, электрическим транспортным средством (EV), которое может двигаться с помощью первой вращательной электрической машины MG1 и второй вращательной электрической машины MG2 в качестве источника мощности. Транспортное средство 100 может быть гибридным автомобилем, который дополнительно включает в себя двигатель в качестве источника мощности.
Система привода для транспортного средства 1-1 согласно этому варианту осуществления включает в себя первую вращательную электрическую машину MG1, вторую вращательную электрическую машину MG2 и планетарный зубчатый механизм 10. Система привода для транспортного средства 1-1 может включать в себя ECU 50.
Каждая из первой вращательной электрической машины MG1 и второй вращательной электрической машины MG2 имеют функцию электродвигателя (мотора) и функцию генератора электрической мощности. Первая вращательная электрическая машина MG1 и вторая вращательная электрическая машина MG2 соединяются с аккумулятором через инвертор. Первая вращательная электрическая машина MG1 и вторая вращательная электрическая машина MG2 могут преобразовывать электрическую энергию, подаваемую от аккумулятора, в механическую энергию и могут выводить механическую энергию и могут возбуждаться с помощью входной энергии, чтобы преобразовывать механическую энергию в электрическую энергию. Электрическая энергия, сгенерированная посредством вращательных электрических машин MG1, MG2, может накапливаться в аккумуляторе. Например, синхронный электродвигатель-генератор переменного тока может быть использован в качестве первой вращательной электрической машины MG1 и второй вращательной электрической машины MG2.
В этом варианте осуществления первая вращательная электрическая машина MG1 соответствует первому электродвигателю, а вторая вращательная электрическая машина MG2 соответствует второму электродвигателю. Настоящее изобретение не ограничивается этой конфигурацией, но другой известный электродвигатель, например, двигатель, может быть размещен вместо первой вращательной электрической машины MG1. Другой известный электродвигатель, например, двигатель, может быть размещен вместо второй вращательной электрической машины MG2. Первый электродвигатель и второй электродвигатель могут быть произвольным электродвигателем, который может преобразовывать энергию во вращательное движение и выводить вращательное движение. Предпочтительно, чтобы двигатель включал в себя запускающее устройство, такое как стартер, или имел возможность запускаться автономно.
Планетарный зубчатый механизм 10 соответствует дифференциальному механизму. Фиг. 3 представляет собой схему, иллюстрирующую пример конфигурации планетарного зубчатого механизма 10 и соединения с вращательными электрическими машинами MG1, MG2. Планетарный зубчатый механизм 10 является механизмом с одинарной планетарной шестерней и включает в себя солнечную шестерню 11, планетарную шестерню 12, коронную шестерню 13 и водило 14. Коронная шестерня 13 является соосной с солнечной шестерней 11 и расположена снаружи в радиальном направлении солнечной шестерни 11. Планетарная шестерня 12 располагается между солнечной шестерней 11 и коронной шестерней 13 и зацепляется с солнечной шестерней 11 и коронной шестерней 13. Планетарная шестерня 12 поддерживается с возможностью вращения водилом 14. Водило 14 поддерживается с возможностью вращения соосно с солнечной шестерней 11.
В этом варианте осуществления планетарный зубчатый механизм 10 включает в себя три вращающихся элемента - солнечную шестерню 11, водило 14 и коронную шестерню 13. Солнечная шестерня 11 соединяется с первой вращательной электрической машиной MG1 и вращается как единое тело с ротором первой вращательной электрической машины MG1. Коронная шестерня 13 соединяется со второй вращательной электрической машиной MG2 и вращается как единое тело с ротором второй вращательной электрической машины MG2. Водило 14 соединяется с выходной шестерней 20 и вращается как единое тело с выходной шестерней 20. В этом варианте осуществления солнечная шестерня 11 соответствует первому вращающемуся элементу, коронная шестерня 13 соответствует второму вращающемуся элементу, а водило 14 соответствует третьему вращающемуся элементу.
Обращаясь к фиг. 2 снова, выходная шестерня 20 зацепляется с коронной шестерней 30a дифференциала устройства 30 дифференциала. Устройство 30 дифференциала соединяется с ведущими колесами 32 через правый и левый приводной вал 31. Т.е., водило 14 соединяется с ведущими колесами 32 через выходную шестерню 20, устройство 30 дифференциала и приводной вал 31.
ECU 50 установлен в транспортном средстве 100. ECU 50 является электронным блоком управления, включающим в себя компьютер. ECU 50 имеет функцию контроллера, который управляет составными блоками транспортного средства 100. ECU 50 соединяется с первой вращательной электрической машиной MG1 и второй вращательной электрической машиной MG2 и может управлять первой вращательной электрической машиной MG1 и второй вращательной электрической машиной MG2. Когда двигатель установлен в транспортном средстве 100, ECU 50 может управлять двигателем.
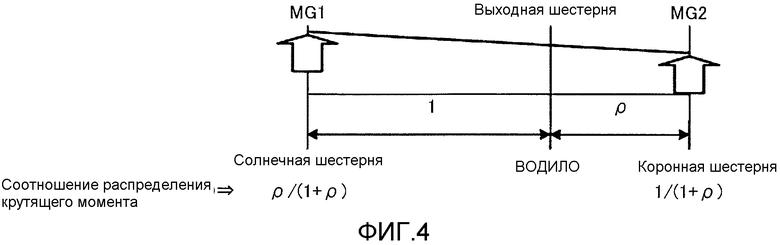
Фиг. 4 является коллинеарной схемой планетарного зубчатого механизма 10. В коллинеарной схеме левая ось представляет скорость вращения солнечной шестерни 11 и первой вращательной электрической машины MG1, центральная ось представляет скорость вращения водила 14 и выходной шестерни 20, правая ось представляет скорость вращения коронной шестерни 13 и второй вращательной электрической машины MG2. Как иллюстрировано на фиг. 4, в коллинеарной схеме, водило 14, т.е., третий вращающийся элемент, располагается между солнечной шестерней 11 и коронной шестерней 13. Другими словами, в коллинеарной схеме, первая вращательная электрическая машина MG1 и солнечная шестерня 11 располагаются на противоположных сторонах, и вторая вращательная электрическая машина MG2 и коронная шестерня 13 располагаются на противоположных сторонах с водилом 14 в качестве выходного вала, вставленным между ними.
С такой конфигурацией на коллинеарной схеме система привода для транспортного средства 1-1 составляет тип выбора скорости вращения, в котором скорость вращения первой вращательной электрической машины MG1 и скорость вращения второй вращательной электрической машины MG2 могут изменяться при одной и той же скорости транспортного средства. Скорость вращения первой вращательной электрической машины MG1 (далее в данном документе также просто называемая "скорость вращения MG1") и скорость вращения второй вращательной электрической машины MG2 (далее в данном документе также просто называемая "скоростью вращения MG2") могут выбираться в корреляции друг с другом относительно скорости вращения водила 14, требуемой для транспортного средства.
С другой стороны, соотношение крутящего момента первой вращательной электрической машины MG1 (далее в данном документе также просто называемого "крутящим моментом MG1") и крутящего момента второй вращательной электрической машины MG2 (далее в данном документе также просто называемого "крутящим моментом MG2") уникально определяется. Отношение крутящих моментов для крутящего момента MG1 и крутящего момента MG2 определяется в зависимости от передаточного отношения планетарного зубчатого механизма 10. В частности, когда передаточное отношение солнечной шестерни 11 и водила 14 устанавливается в 1, а передаточное отношение водила 14 и коронной шестерни 13 устанавливается в ρ, соотношение распределения крутящего момента солнечной шестерни 11 выражается посредством выражения (1), а соотношение распределения крутящего момента коронной шестерни 13 выражается посредством выражения (2).
ρ/(1+ρ) …(1)
1/(1+ρ) …(2)
Т.е., крутящий момент MG1, который должен выводиться из первой вращательной электрической машины MG1, и крутящий момент MG2, который должен выводиться из второй вращательной машины MG2, соответственно определяются по соотношению распределения на основе запрошенных значений, таких как запрошенный крутящий момент транспортного средства 100. Например, когда запрошенным значением крутящего момента, который должен быть выведен от водила 14, является Tout, MG1-крутящий момент Tmg1 определяется посредством выражения (3), а MG2-крутящий момент Tmg2 определяется посредством выражения (4).
Tmg1=Tout×ρ/(1+ρ) …(3)
Tmg2=Tout×1/(1+ρ) …(4)
Здесь, то, как управлять функционированием двух вращательных электрических машин MG1, MG2 в зубчатой передаче, в которой скорость вращения MG1 и скорость вращения MG2 могут быть выбраны, не было достаточно изучено. Например, когда скорость вращения MG1 и скорость вращения MG2 изменяются одновременно, управление может быть усложнено. Предпочтительно, чтобы вращательные электрические машины MG1, MG2 управлялись, чтобы уменьшать потери.
Система привода для транспортного средства 1-1 согласно этому варианту осуществления вынуждает одну из двух вращательных электрических машин MG1, MG2 работать в рабочей точке, выбранной из нескольких предварительно определенных возможных точек, и задает конкретную скорость транспортного средства и конкретную движущую силу с помощью другой вращательной электрической машины. Т.е., одна вращательная электрическая машина вынуждается работать ступенчато, а другая вращательная электрическая машина вынуждается работать линейно.
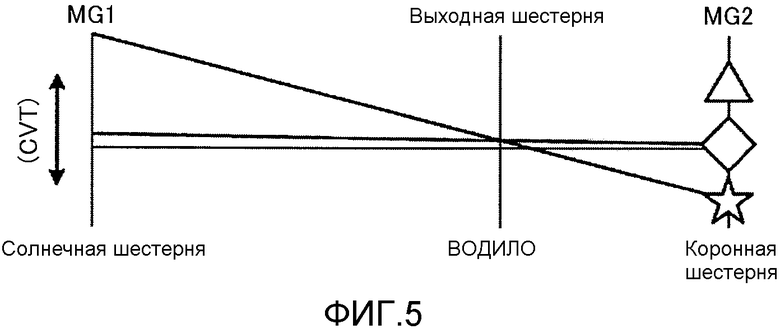
Фиг. 5 является схемой, иллюстрирующей изображение действия каждого вращающегося элемента в системе привода для транспортного средства 1-1 согласно этому варианту осуществления. В этом варианте осуществления вторая вращательная электрическая машина MG2 является вращательной электрической машиной, которая должна работать ступенчато, а первая вращательная электрическая машина MG1 является вращательной электрической машиной для реализации конкретной скорости транспортного средства и конкретной движущей силы. В этом варианте осуществления инерция второй вращательной электрической машины MG2 больше инерции первой вращательной электрической машины MG1. Т.е., в этом варианте осуществления, вторая вращательная электрическая машина MG2, имеющая относительно большую инерцию, является вращательной электрической машиной, которая должна работать ступенчато, а первая вращательная электрическая машина MG1, имеющая относительно небольшую инерцию, является вращательной электрической машиной, которая должна работать линейно. Целевые параметры управления первой вращательной электрической машины MG1, т.е., целевые значения скорости вращения и крутящего момента первой вращательной электрической машины MG1, определяются, чтобы быть значениями, допускающими реализацию запрошенной полезной отдачи транспортного средства 100. Целевым параметрам управления первой вращательной электрической машины MG1 предоставляется возможность быть произвольно определенными в диапазоне параметра управления, который может быть выведен из первой вращательной электрической машины MG1.
Как иллюстрировано на фиг. 5, множество возможных точек (треугольная метка, четырехугольная метка и метка в виде звездочки) определяются заранее в качестве выбираемых точек параметра управления в скорости вращения второй вращательной электрической машины MG2. Эти возможные точки определяются в диапазоне скорости вращения, который может быть выведен из второй вращательной электрической машины MG2 и является непрерывным и дискретным.
Например, интервал между соседними возможными точками больше, чем минимальная ширина шага, когда скорость вращения второй вращательной электрической машины MG2 изменяется последовательно. Целевая скорость вращения второй вращательной электрической машины MG2 выбирается из скоростей вращения возможных точек. Скорости вращения между областями, отличными от возможной точки, например, между возможными точками, не могут быть выбраны в качестве целевой скорости вращения второй вращательной электрической машины MG2. Т.е., области, которые не могут быть выбраны в качестве целевой скорости вращения, определяются в диапазоне скорости вращения, который может быть выведен из второй вращательной электрической машины MG2. Области, которые не могут быть выбраны в качестве целевой скорости вращения, дискретно определяются с возможными точками, вставленными между ними, и определяется множество невыбираемых областей.
То же справедливо для крутящего момента второй вращательной электрической машины MG2. В этом варианте осуществления целевая рабочая точка второй вращательной электрической машины MG2 выбирается из возможных рабочих точек X1, X2 и X3 (см. фиг. 6), которые должны быть описаны позже. Соответственно, области, которые не могут быть выбраны в качестве целевого крутящего момента, определяются в диапазоне крутящего момента, который может быть выведен из второй вращательной электрической машины MG2.
Области, которые не могут быть выбраны в качестве целевого параметра управления, могут быть не определены для чего-либо из скорости вращения и крутящего момента второй вращательной электрической машины MG2. Что касается параметра управления первой вращательной электрической машины MG1 вместо второй вращательной электрической машины MG2, области, которые не могут быть выбраны в качестве целевого параметра управления, могут быть определены в диапазоне параметра управления, который может быть выведен.
Поскольку целевая скорость вращения второй вращательной электрической машины MG2 выбирается из возможных точек, которые дискретно размещены, вторая вращательная электрическая машина MG2 может служить в качестве ступенчатой регулируемой передачи, которая изменяет выходную скорость вращения ступенчатым образом.
С другой стороны, целевая скорость вращения первой вращательной электрической машины MG1 может быть установлена в произвольную скорость вращения. Т.е., первая вращательная электрическая машина MG1 может служить в качестве бесступенчато регулируемой передачи (CVT), которая непрерывно изменяет выходную скорость вращения. В этом варианте осуществления минимальное изменение целевой скорости вращения во время изменения целевой скорости вращения первой вращательной электрической машины MG1 меньше минимального изменения целевой скорости вращения во время изменения целевой скорости вращения второй вращательной электрической машины MG2.
Система привода для транспортного средства 1-1 вынуждает рабочую точку второй вращательной электрической машины MG2 раньше перемещаться в целевую рабочую точку, чем рабочая точка первой вращательной электрической машины MG1 во время изменения рабочей точки на основе запрошенной полезной отдачи транспортного средства 100. Т.е., параметр управления второй вращательной электрической машины MG2 раньше изменяется в целевой параметр управления, чем параметр управления первой вращательной электрической машины MG1.
Фиг. 6 представляет собой схему, иллюстрирующую способ выбора рабочей точки второй вращательной электрической машины MG2, а фиг. 7 - схему, иллюстрирующую способ выбора рабочей точки первой вращательной электрической машины MG1. На фиг. 6, 7 горизонтальная ось представляет скорость вращения, а вертикальная ось представляет крутящий момент. Направление вращения вперед является направлением вращения водила 14 и выходной шестерни 20, когда транспортное средство 100 движется вперед.
На фиг. 6 пунктирные линии P11, P12, P13, P14, P15 и P16 представляют линии эквивалентной мощности. На фиг. 7 пунктирные линии P21, P22, P23, P24, P25, P26, P27 и P28 представляют линии эквивалентной мощности. Линии эквивалентной мощности соединяют рабочие точки, имеющие одинаковую мощность. Сплошная линия 101 на фиг. 6 и сплошная линия 102 на фиг. 7 представляют оптимальные рабочие линии. Оптимальная рабочая линия (далее в данном документе просто называемая "MG2-оптимальной рабочей линией") 101 второй вращательной электрической машины MG2 соединяет рабочие точки, в которых вторая вращательная электрическая машина MG2 может работать с высокой эффективностью. MG2-оптимальная рабочая линия 101 соединяет, например, рабочие точки, в которых эффективность второй вращательной электрической машины MG2 является наибольшей на линиях P11, P12, P13, P14, P15 и P16 эквивалентной мощности.
Точки X1, X2 и X3 в MG2-оптимальной рабочей линии 101 являются предварительно определенными возможными рабочими точками. Целевая рабочая точка второй вращательной электрической машины MG2 выбирается из возможных рабочих точек X1, X2 и X3. Другими словами, рабочая точка, отличная от возможных рабочих точек X1, X2 и X3, блокируется от задания в качестве целевой рабочей точки. Второй вращательной электрической машине может быть предоставлена возможность работать в рабочей точке, отличной от возможных рабочих точек X1, X2 и X3 в переходном состоянии или т.п.
Оптимальная рабочая линия (далее в данном документе просто называемая "MG1-оптимальной рабочей линией") 102 первой вращательной электрической машины MG1 соединяет рабочие точки, в которых первая вращательная электрическая машина MG1 может работать с высокой эффективностью. MG1-оптимальная рабочая линия 102 соединяет, например, рабочие точки, в которых эффективность первой вращательной электрической машины MG1 является наибольшей на линиях P21, P22, P23, P24, P25, P26, P27 и P28 эквивалентной мощности.
ECU 50 определяет целевую рабочую точку второй вращательной электрической машины MG2, например, как будет описано ниже. ECU 50 вычисляет запрошенную мощность транспортного средства 100, например, на основе степени открытия акселератора и скорости транспортного средства. Запрошенное значение Tout крутящего момента, выводимого с водила 14, может быть вычислено на основе запрошенной мощности, скорости колеса транспортного средства и коэффициента понижающего редуктора от водила 14 к ведущим колесам 32. ECU 50 определяет MG2-крутящий момент Tmg2 на основе выражения (4) с помощью запрошенного значения Tout крутящего момента.
ECU 50 выбирает целевую рабочую точку из возможных рабочих точек X1, X2 и X3 на основе определенного MG2-крутящего момента Tmg2. ECU 50 может выбирать возможную рабочую точку, в которой отличие крутящего момента от определенного MG2-крутящего момента Tmg2 является минимальным, и отличие скорости вращения от текущей скорости вращения MG2 является небольшим, в качестве целевой рабочей точки. Альтернативно, ECU 50 может выбирать возможную рабочую точку, в которой отличие скорости вращения от текущей скорости вращения MG2 является минимальным из возможных рабочих точек X1, X2 и X3, в качестве целевой рабочей точки. Альтернативно, ECU 50 может выбирать возможную рабочую точку, в которой отличие мощности от линии эквивалентной мощности, соответствующей определенному MG2-крутящему моменту Tmg2 и предварительно определенная скорость вращения является минимальной, в качестве целевой рабочей точки. Предварительно определенная скорость вращения может быть установлена, например, в текущую скорость вращения MG2, скорость вращения водила 14, предварительно определенную скорость вращения MG2 относительно скорости вращения водила 14 или т.п.
Среди возможных рабочих точек X1, X2 и X3, ECU 50 может выбирать возможную рабочую точку, в которой отличие крутящего момента от определенного MG2-крутящего момента Tmg2 является небольшим, и отличие скорости вращения от текущей скорости вращения MG2 является минимальным, в качестве целевой рабочей точки.
Когда возможная рабочая точка, в которой отличие скорости вращения от текущей скорости вращения MG2 является небольшим, выбирается в качестве целевой рабочей точки, инерционная потеря во время перемещения рабочей точки второй вращательной электрической машины MG2 может быть уменьшена. Выбирая возможную рабочую точку, в которой отличие скорости вращения от текущей скорости вращения MG2 является небольшим, в качестве целевой рабочей точки, текущая рабочая точка часто выбирается снова в качестве целевой рабочей точки, даже когда требование к транспортному средству 100 слегка изменяется. В результате, степень изменения рабочей точки второй вращательной электрической машины MG2 уменьшается, и, таким образом, инерционная потеря уменьшается.
ECU 50 управляет второй вращательной электрической машиной MG2 на основе определенной целевой рабочей точки второй вращательной электрической машины MG2. Когда рабочая точка второй вращательной электрической машины MG2 перемещается в целевую рабочую точку, ECU 50 инструктирует второй вращательной электрической машине MG2 работать в целевой рабочей точке.
С другой стороны, ECU 50 определяет рабочую точку первой вращательной электрической машины MG1 на основе целевой рабочей точки или фактической рабочей точки второй вращательной электрической машины MG2 и запроса к транспортному средству 100. Например, ECU 50 вычисляет целевой MG1-крутящий момент Tmg1 первой вращательной электрической машины MG1 с помощью выражения (3) на основе запрошенного значения Tout крутящего момента. Скорость вращения MG1 определяется на основе скорости транспортного средства и скорости вращения MG2. ECU 50 устанавливает временную целевую рабочую точку в рабочую точку, определенную на основе определенной скорости вращения MG1 и целевого MG1-крутящего момента Tmg1 первой вращательной электрической машины MG1.
Например, ECU 50 может устанавливать временную целевую рабочую точку в качестве целевой рабочей точки первой вращательной электрической машины MG1 без какого-либо изменения. Альтернативно, точка поблизости от временной целевой рабочей точки на MG1-оптимальной рабочей линии 102 может быть установлена в качестве целевой рабочей точки первой вращательной электрической машины MG1.
ECU 50 может устанавливать рабочую точку на MG1-оптимальной рабочей линии 102, в которой запрошенное значение Tout крутящего момента может быть реализовано, в качестве целевой рабочей точки первой вращательной электрической машины MG1. С другой стороны, целевая рабочая точка первой вращательной электрической машины MG1 может быть определена с помощью другого способа с тем, чтобы реализовывать запрошенную полезную отдачу транспортного средства.
Фиг. 7 иллюстрирует пример целевых рабочих точек Y1, Y2 и Y3 первой вращательной электрической машины MG1, соответствующих возможным рабочим точкам X1, X2 и X3, иллюстрированным на фиг. 6. Например, когда возможная рабочая точка X1 задается в качестве целевой рабочей точки второй вращательной электрической машины MG2, целевая рабочая точка первой вращательной электрической машины MG1 является рабочей точкой, указанной ссылкой Y1.
Как иллюстрировано на фиг. 7, задается рекомендованная рабочая область R1 первой вращательной электрической машины MG1. Рекомендованная рабочая область R1 определяется как область вблизи MG1-оптимальной рабочей линии 102. На фиг. 7 рекомендованная рабочая область R1 является прямоугольной областью, но не ограничивается этой формой. Рекомендованная рабочая область R1 может быть определена, например, как набор рабочих точек, в которых эффективность первой вращательной электрической машины MG1 больше или равна предварительно определенному значению.
Например, когда определенная целевая рабочая точка первой вращательной электрической машины MG1 не является рабочей точкой в рекомендованной рабочей области R1, ECU 50 может выбирать целевую рабочую точку второй вращательной электрической машины MG2 снова. Например, когда определенная целевая рабочая точка первой вращательной электрической машины MG1 отклоняется в сторону более низкой скорости вращения от рекомендованной рабочей области R1, целевая рабочая точка второй вращательной электрической машины MG2 выбирается снова с тем, чтобы устанавливать целевую скорость вращения первой вращательной электрической машины MG1 в более высокую скорость вращения. Например, из возможных рабочих точек X1, X2 и X3 возможная рабочая точка, которая расположена на стороне более низкой скорости вращения, чем целевая рабочая точка второй вращательной электрической машины MG2 до сих пор, выбирается в качестве новой целевой рабочей точки.
Посредством этого управления с обратной связью возможно улучшать общую эффективность двух вращательных электрических машин MG1, MG2.
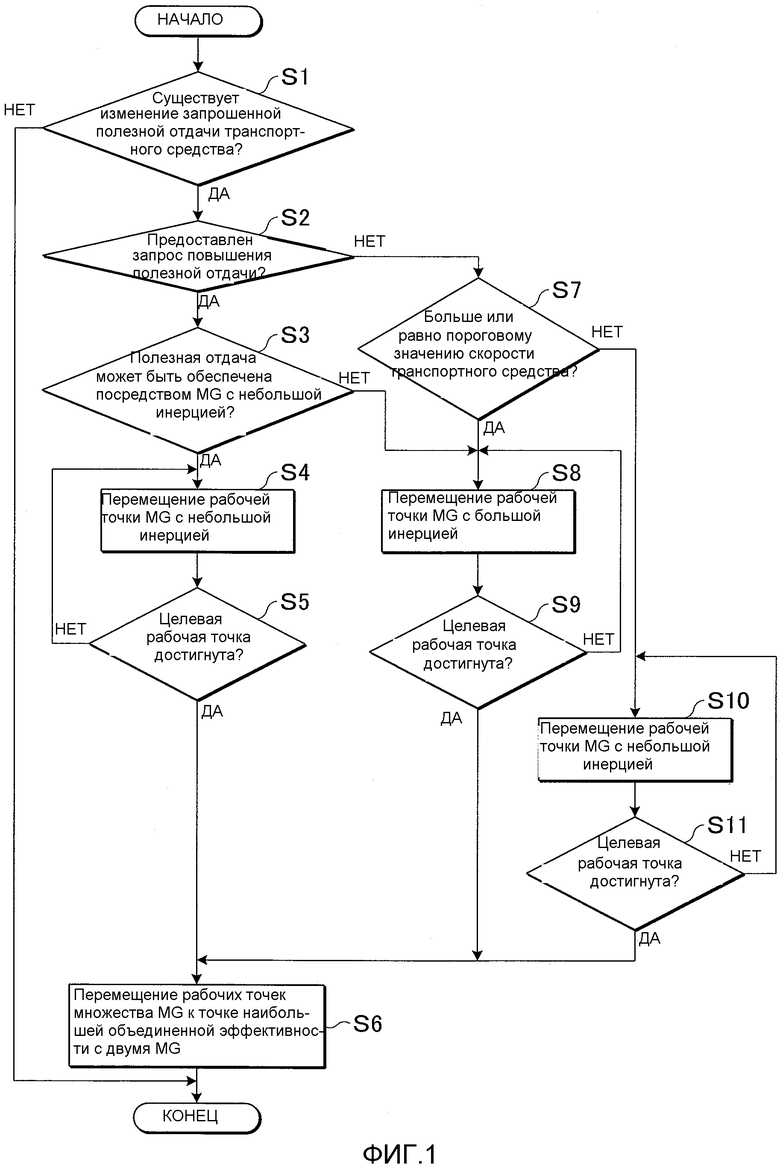
Управление этого варианта осуществления будет описано ниже со ссылкой на фиг. 1. Алгоритм управления, иллюстрированный на фиг. 1, выполняется, когда транспортное средство 100 останавливается или движется, и выполняется повторяющимся образом, например, для каждого предварительно определенного интервала времени.
Сначала, на этапе S1, ECU 50 определяет, изменилась или нет запрошенная полезная отдача транспортного средства. На этапе S1 определяется, предоставлена ли запрошенная полезная отдача транспортного средства, чтобы изменять рабочие точки вращательных электрических машин MG1, MG2. ECU 50 выполняет определение на этапе S1, например, на основе изменений в запрошенной мощности, запрошенной движущей силе и запрошенном крутящем моменте транспортного средства 100. Например, когда изменение запрошенной полезной отдачи транспортного средства 100 больше или равно предварительно определенному значению, результат определения этапа S1 может быть установлен положительным. Процесс на этапе S2 выполняется, когда на этапе S1 определено, что запрошенная полезная отдача транспортного средства изменилась (Y на этапе S1), и алгоритм управления заканчивается в ином случае (N на этапе S1).
На этапе S2 ECU 50 определяет, является ли изменение запрошенной полезной отдачи транспортного средства на этапе S1 запросом повышения (UP) полезной отдачи. На этапе S2 определяется, предоставлен ли запрос на ускорение. Когда изменение запрошенной полезной отдачи транспортного средства является изменением для ускорения транспортного средства 100, ECU 50 делает определение на этапе S2 положительным. Процесс на этапе S3 выполняется, когда определяется на этапе S2, что предоставлен запрос повышения полезной отдачи (Y на этапе S2), а иначе выполняется процесс на этапе S7 (N на этапе S2).
На этапе S3 ECU 50 определяет, можно ли полезную отдачу обеспечить посредством вращательной электрической машины с небольшой инерцией. ECU 50 определяет, может ли запрошенная полезная отдача транспортного средства быть реализована посредством управления вращательной электрической машиной с небольшой инерцией, т.е., первой вращательной электрической машиной MG1 в этом варианте осуществления. Более конкретно, ECU 50 определяет, может ли запрошенная полезная отдача транспортного средства, например, запрошенная мощность, быть реализована посредством изменения рабочей точки первой вращательной электрической машины MG1, в то же время сохраняя рабочую точку второй вращательной электрической машины MG2 в текущей рабочей точке.
ECU 50 определяет, присутствует ли рабочая точка первой вращательной электрической машины MG1, например, в которой запрошенная полезная отдача транспортного средства может быть реализована, в допустимой рабочей области. Допустимая рабочая область может быть, например, областью рабочей точки в диапазоне максимального крутящего момента или максимальной скорости вращения, который может быть выведен, или областью рабочей точки в диапазоне максимального крутящего момента или максимальной скорости вращения, определенном заранее в терминах эффективности или т.п. Во время определения на этапе S3 на основе допустимой рабочей области результат определения является положительным, когда рабочая точка первой вращательной электрической машины MG1, в которой запрошенная полезная отдача транспортного средства может быть реализована, находится в допустимой рабочей области, и результат определения является отрицательным, когда рабочая точка отклоняется от допустимой рабочей области.
Процесс на этапе S4 выполняется, когда на этапе S3 определено, что полезная отдача является полезной отдачей, которая может быть удовлетворена с помощью вращательной электрической машины с небольшой инерцией (Y на этапе S3), а иначе выполняется процесс на этапе S8 (N на этапе S3).
На этапе S4 перемещение рабочей точки вращательной электрической машины с небольшой инерцией, т.е., первой вращательной электрической машины MG1, выполняется посредством ECU 50. ECU 50 инструктирует перемещение рабочей точки первой вращательной электрической машины MG1 в целевую рабочую точку с тем, чтобы реализовать запрошенную полезную отдачу транспортного средства. После того как процесс на этапе S4 выполнен, выполняется процесс на этапе S5.
На этапе S5 ECU 50 определяет, достигает ли рабочая точка целевой рабочей точки. ECU 50 определяет, достигает ли рабочая точка первой вращательной электрической машины MG1 целевой рабочей точки, в которой запрошенная полезная отдача транспортного средства может быть реализована. Процесс на этапе S6 выполняется, когда определено, что рабочая точка достигает целевой рабочей точки (Y на этапе S5), а иначе выполняется процесс на этапе S4 (N на этапе S5).
На этапе S7 ECU 50 определяет, выше или равна скорость транспортного средства пороговому значению. В этом варианте осуществления, когда предоставлен запрос на замедление (N на этапе S2), то, какую рабочую точку из первой вращательной электрической машины MG1 и второй вращательной электрической машины MG2 предпочтительно перемещать, определяется на основе скорости транспортного средства. В ответ на запрос рекуперации (замедления) ECU 50 предпочтительно выполняет выработку рекуперированной мощности с помощью вращательной электрической машины с большой инерцией, т.е., второй вращательной электрической машины MG2 в этом варианте осуществления, в диапазоне высокой скорости транспортного средства. Соответственно, возможно понижать скорость вращения второй вращательной электрической машины MG2. Понижая скорость вращения MG2, возможно пресекать потери вследствие непрерывной работы второй вращательной электрической машины MG2 с высокой скоростью вращения.
С другой стороны, в ответ на запрос рекуперации, ECU 50 предпочтительно выполняет выработку рекуперированной мощности с помощью вращательной электрической машины с небольшой инерцией, т.е., первой вращательной электрической машины MG1 в этом варианте осуществления, в диапазоне низкой скорости транспортного средства. Соответственно, возможно понижать скорость вращения первой вращательной электрической машины MG1. Понижая скорость вращения MG1, ускорение может быть реализовано посредством первой вращательной электрической машины MG1 с небольшой инерцией с высокой скоростью реакции, когда предоставляется запрос повторного ускорения. Предпочтительно выполняя выработку рекуперированной мощности с помощью первой вращательной электрической машины MG1, чтобы пресекать изменение в скорости вращения второй вращательной электрической машины MG2, возможно уменьшать общую потерю посредством энергии поддержания вращения. Система привода для транспортного средства 1-1 согласно этому варианту осуществления может добиваться согласования друг с другом в улучшении в величине рекуперативной мощности и улучшении в ответной реакции во время повторного ускорения.
Процесс на этапе S8 выполняется, когда на этапе S7 определено, что скорость транспортного средства выше или равна пороговому значению (Y на этапе S7), а иначе выполняется процесс на этапе S10 (N на этапе S7).
На этапе S8 перемещение рабочей точки вращательной электрической машины с большой инерцией, т.е., второй вращательной электрической машины MG2, выполняется посредством ECU 50. ECU 50 определяет целевую рабочую точку второй вращательной электрической машины MG2 на основе запрошенной полезной отдачи транспортного средства. Например, когда результат определения на этапе S3 является отрицательным, и выполняется процесс на этапе S8, рабочая точка второй вращательной электрической машины MG2 может быть определена посредством способа, описанного выше со ссылкой на фиг. 6.
С другой стороны, когда алгоритм процесса переходит от этапа S7 к этапу S8, запрошенной полезной отдачей транспортного средства является запрос на замедление, и отрицательный крутящий момент требуется для второй вращательной электрической машины MG2. MG2-оптимальная рабочая линия 101 и возможные рабочие точки X1, X2 и X3, когда крутящий момент MG2 является положительным крутящим моментом, иллюстрированы на фиг. 6, но оптимальная рабочая линия и возможные рабочие точки аналогично определяются, когда крутящий момент MG2 является отрицательным крутящим моментом. Соответственно, ECU 50 может определять целевую рабочую точку второй вращательной электрической машины MG2 во время рекуперации на основе оптимальной рабочей линии и возможных рабочих точек отрицательного крутящего момента. ECU 50 вынуждает рабочую точку второй вращательной электрической машины MG2 перемещаться к определенной целевой рабочей точке. После того как процесс на этапе S8 выполнен, выполняется процесс на этапе S9.
На этапе S9 ECU 50 определяет, достигает ли рабочая точка целевой рабочей точки. ECU 50 определяет, достигает ли рабочая точка второй вращательной электрической машины MG2 целевой рабочей точки. Процесс на этапе S6 выполняется, когда определено, что рабочая точка достигает целевой рабочей точки (Y на этапе S9), а иначе выполняется процесс на этапе S8 (N на этапе S9).
На этапе S10 перемещение рабочей точки вращательной электрической машины с небольшой инерцией, т.е., первой вращательной электрической машины MG1, выполняется посредством ECU 50. ECU 50 определяет целевую рабочую точку первой вращательной электрической машины MG1 на основе запрошенной полезной отдачи транспортного средства. Оптимальная рабочая линия 102 MG1 и рекомендуемая рабочая область R1, когда крутящий момент MG1 является положительным крутящим моментом, иллюстрируются на фиг. 7, но оптимальная рабочая линия и рекомендуемая рабочая область аналогично определяются, даже когда крутящий момент MG1 является отрицательным крутящим моментом. Соответственно, ECU 50 может определять целевую рабочую точку первой вращательной электрической машины MG1 во время рекуперации на основе оптимальной рабочей линии и рекомендуемой рабочей области для отрицательного крутящего момента. ECU 50 вынуждает рабочую точку первой вращательной электрической машины MG1 перемещаться в целевую рабочую точку. После того как процесс на этапе S10 выполнен, выполняется процесс на этапе S11.
На этапе S11 ECU 50 определяет, достигает ли рабочая точка целевой рабочей точки. ECU 50 определяет, достигает ли рабочая точка первой вращательной электрической машины MG1 целевой рабочей точки, на основе запрошенной полезной отдачи транспортного средства. Процесс на этапе S6 выполняется, когда определено, что рабочая точка достигает целевой рабочей точки (Y на этапе S11), а иначе выполняется процесс на этапе S10 (N на этапе S11).
На этапе S6 ECU 50 перемещает вращательные электрические машины в точку наибольшей объединенной эффективности с двумя MG. ECU 50 вынуждает первую вращательную электрическую машину MG1 и вторую вращательную электрическую машину MG2 работать в рабочей точке, в которой сумма потери первой вращательной электрической машины MG1 и потери второй вращательной электрической машины MG2 является минимальной, и достигается наибольшая эффективность с двумя MG.
Например, когда алгоритм процесса переходит от этапа S5 к этапу S6, фактическая рабочая точка может перемещаться в рабочую точку, в которой эффективность двух MG является наибольшей, посредством управления с обратной связью, которое должно быть описано ниже.
Когда целевая рабочая точка первой вращательной электрической машины MG1, достигнутая на этапе S5, является рабочей точкой, отклоняющейся от рекомендованной рабочей области R1, ECU 50 вынуждает рабочую точку второй вращательной электрической машины MG2 перемещаться. В частности, из возможных рабочих точек X1, X2 и X3 рабочая точка, отличная от текущей рабочей точки второй вращательной электрической машины MG2, выбирается снова в качестве целевой рабочей точки второй вращательной электрической машины MG2. Предпочтительно, чтобы повторный выбор целевой рабочей точки выполнялся так, что целевая рабочая точка первой вращательной электрической машины MG1, определенная на основе повторно выбранной целевой рабочей точки второй вращательной электрической машины MG2, находилась в рекомендованной рабочей области R1. Когда рабочая точка второй вращательной электрической машины MG2 перемещается в повторно выбранную рабочую точку, целевая рабочая точка первой вращательной электрической машины MG1 определяется повторно. До тех пор, пока объединенная эффективность первой вращательной электрической машины MG1 и второй вращательной электрической машины MG2 не будет оптимальной, повторный выбор целевой рабочей точки второй вращательной электрической машины MG2 и повторное определение целевой рабочей точки первой вращательной электрической машины MG1 может выполняться циклически.
Даже когда алгоритм процесса переходит от этапа S9 или этапа S11 к этапу S6, перемещение рабочих точек первой вращательной электрической машины MG1 и второй вращательной электрической машины MG2 может аналогично выполняться в рабочие точки, в которых объединенная эффективность является наибольшей. Например, объединенная эффективность двух вращательных электрических машин может быть вычислена из эффективности текущей рабочей точки первой вращательной электрической машины MG1 и эффективности текущей рабочей точки второй вращательной электрической машины MG2. Целевые рабочие точки первой вращательной электрической машины MG1 и второй вращательной электрической машины MG2 могут быть повторно определены так, что эта эффективность является наибольшей эффективностью в ответ на запрошенную полезную отдачу транспортного средства. Когда процесс на этапе S6 выполнен, этот алгоритм управления завершается.
Как описано выше, в системе привода для транспортного средства 1-1 согласно этому варианту осуществления области, которые не могут быть выбраны в качестве целевого параметра управления, определяются в диапазоне параметра управления, который может быть выведен из одной вращательной электрической машины. Соответственно, ступенчато изменяя целевой параметр управления одной вращательной электрической машины, степень изменения параметра управления вращательной электрической машины может быть сделана меньшей, чем степень изменения параметра управления другой вращательной электрической машины. Здесь, степень изменения параметра управления может быть, например, частотой изменения параметра управления, соотношением по времени, в котором параметр управления изменяется, объединенным значением величины изменения параметра управления или т.п. Уменьшая степень изменения параметра управления одной вращательной электрической машины, возможно улучшать эффективность вращательной электрической машины и, таким образом, улучшать эффективность электрической мощности.
Например, вынуждая вращательную электрическую машину с большой инерцией работать ступенчато, степень изменения параметра управления вращательной электрической машины с большой инерцией может быть сделана меньшей, чем степень изменения параметра управления вращательной электрической машины с небольшой инерцией. Пресекая изменение параметра управления вращательной электрической машины с большой инерцией, возможно ожидать улучшения эффекта пресечения инерционных потерь вследствие изменения вращения.
Изменяя рабочую точку вращательной электрической машины, в которой вращательная электрическая машина работает ступенчато, когда запрошенное изменение транспортного средства 100 больше или равно предварительно определенному значению, возможно улучшать ответную реакцию, например, первоначальную ответную реакцию. Т.е., задействуя вращательную электрическую машину с небольшой инерцией, когда запрошенное изменение транспортного средства 100 меньше предварительно определенного значения, возможно улучшать ответную реакцию на запрошенное изменение.
Вынуждая одну вращательную электрическую машину работать ступенчато и точно управляя скоростью транспортного средства с помощью другой вращательной электрической машины, возможно улучшать точность управления скоростью вращения. Например, по сравнению со случаем, когда скорости вращения двух вращательных электрических машин MG1, MG2 непрерывно изменяются, возможно улучшать точность управления скоростью вращения.
Система привода для транспортного средства 1-1 согласно этому варианту осуществления не инструктирует перемещение рабочей точки одной из первой вращательной электрической машины MG1 и второй вращательной электрической машины MG2, в то же время инструктирует перемещение рабочей точки другой вращательной электрической машины. Т.е., изменение параметра управления одной вращательной электрической машины запрещается во время изменения параметра управления другой вращательной электрической машины.
Поскольку только одна вращательная электрическая машина движется в данный момент времени, возможно уменьшать потери. Эта конфигурация может быть использована в качестве меры противодействия отказу, когда датчик скорости вращения не показывает истинное значение или т.п. Например, датчик скорости вращения первой вращательной электрической машины MG1 не показывает истинное значение, и скорость вращения первой вращательной электрической машины MG1 и скорость вращения второй вращательной электрической машины MG2 одновременно изменяются, фактическая скорость вращения первой вращательной электрической машины MG1 может быть неизвестна. Наоборот, когда выполняется сдвиг скорости вращения только одной из двух вращательных электрических машин MG1, MG2, скорость вращения первой вращательной электрической машины MG1 может быть вычислена из скорости вращения другого вращающегося элемента планетарного зубчатого механизма 10.
Система привода для транспортного средства 1-1 согласно этому варианту осуществления удовлетворяет запрос на ускорение, вынуждая рабочую точку вращательной электрической машины с меньшей инерцией предпочтительно перемещаться. Другими словами, система привода для транспортного средства 1-1 предпочтительно изменяет параметр управления вращательной электрической машины с меньшей инерцией, когда предоставляется запрос ускорения. Когда увеличение запрошенной полезной отдачи транспортного средства может быть выведено посредством первой вращательной электрической машины MG1 с меньшей инерцией, запрошенная полезная отдача транспортного средства реализуется посредством управления первой вращательной электрической машины MG1. После того как запрошенная полезная отдача транспортного средства реализуется для переходов к нормальному движению, полезная отдача распределяется посредством первой вращательной электрической машины MG1 и второй вращательной электрической машины MG2, принимая во внимание эффективность или т.п. Т.е., запрошенная полезная отдача транспортного средства реализуется с быстрой ответной реакцией с помощью вращательной электрической машины с меньшей инерцией в переходном состоянии, в котором полезная отдача транспортного средства изменяется, и выполняется перемещение рабочих точек двух вращательных электрических машин MG1, MG2 к рабочим точкам высокой эффективности, когда достигается нормальное состояние. Соответственно, возможно добиваться улучшения в ответной реакции на ускорение и снижения инерционных потерь.
В этом варианте осуществления, когда предоставляется запрос на замедление, то, какая рабочая точка из двух вращательных электрических машин MG1, MG2 предпочтительно должна перемещаться, определяется на основе скорости транспортного средства, но рабочая точка второй вращательной электрической машины MG2 с большей инерцией может предпочтительно перемещаться в ответ на запрос на замедление, несмотря на скорость транспортного средства.
Планетарный зубчатый механизм 10 может быть механизмом с двойной планетарной шестерней. В этом случае, вращательные электрические машины MG1, MG2 соединяются с солнечной шестерней и водилом, соответственно, и результирующая сила выводится с коронной шестерни. В коллинеарной схеме солнечная шестерня и водило располагаются с двух сторон, а коронная шестерня располагается между ними.
В этом варианте осуществления две вращательных электрических машины MG1, MG2 соединяются с одним планетарным зубчатым механизмом 10, но дифференциальный механизм, соединенный с вращательными электрическими машинами MG1, MG2, не ограничивается одним планетарным зубчатым механизмом. Например, дифференциальный механизм может быть объединенной планетарной передачей или планетарной передачей типа Равиньи (например, которая включает в себя четыре или пять вращающихся элементов), в которой объединены множество планетарных зубчатых механизмов.
Т.е. система привода для транспортного средства 1-1 является системой привода, включающей в себя два электродвигателя и дифференциальный механизм, имеющий три или более вращающихся элемента, в котором каждые два вращающихся элемента среди множества вращающихся элементов соединены с одним электродвигателем, а выходной вал на шины соединяется с другим вращающимся элементом. Система привода для транспортного средства 1-1 не включает в себя тормозной элемент для регулирования вращений вращающихся элементов дифференциального механизма, и все вращающиеся элементы могут свободно перемещаться. В дифференциальном механизме, когда вращения двух произвольных вращающихся элементов определены, определяется скорость вращения другого вращающегося элемента. Вращающиеся элементы, соединенные с двумя электродвигателями, располагаются с противоположных сторон от вывода в коллинеарной схеме.
Вращающийся элемент, отличный от вращающихся элементов, соединенных с двумя электродвигателями, и вращающегося элемента, соединенного с выходным валом на шины, т.е., четвертый вращающийся элемент, может быть соединен с другим электродвигателем. В этом случае, система привода для транспортного средства 1-1 может приводить в движение транспортное средство, в то же время используя электродвигатель, соединенный с четвертым вращающимся элементом. В коллинеарной схеме четвертый вращающийся элемент может быть расположен, например, между солнечной шестерней 11 (первым вращающимся элементом) и водилом 14 (третьим вращающимся элементом) или между водилом 14 и коронной шестерней 13 (вторым вращающимся элементом).
В этом варианте осуществления инерция второй вращательной электрической машины MG2 больше инерции первой вращательной электрической машины MG1, но настоящее изобретение не ограничено этой конфигурацией.
Первый пример модификации варианта осуществления изобретения
Первый пример модификации варианта осуществления будет описан ниже. Разница скоростей вращения между скоростью вращения MG1 и скоростью вращения MG2 может быть увеличена посредством перемещения рабочей точки первой вращательной электрической машины MG1 или рабочей точки второй вращательной электрической машины MG2. Когда разница скоростей вращения между скоростью вращения MG1 и скоростью вращения MG2 увеличивается, потери вследствие дифференциального вращения планетарного зубчатого механизма 10 увеличивается. В этом примере модификации система привода для транспортного средства 1-1 препятствует тому, чтобы разница скоростей вращения между скоростью вращения MG1 и скоростью вращения MG2 становилась больше или равна предварительно определенному значению.
Фиг. 8 представляет собой схему, иллюстрирующую пороговое значение разницы скоростей вращения между скоростью вращения MG1 и скоростью вращения MG2. На фиг. 8 скорость вращения MG2 выше скорости вращения MG1. Разница ΔN скоростей вращения является абсолютным значением разности скоростей вращения между скоростью вращения MG1 и скоростью вращения MG2. ECU 50 препятствует тому, чтобы разница ΔN скоростей вращения становилась больше или равной предварительно определенному пороговому значению. Например, когда целевая рабочая точка первой вращательной электрической машины MG1, в которой запрошенная полезная отдача транспортного средства может быть реализована, определяется на этапе S3 вышеупомянутого варианта осуществления, и разница ΔN скоростей вращения между скоростью вращения MG1 целевой рабочей точки и текущей скоростью вращения MG2 больше или равна пороговому значению, работа первой вращательной электрической машины MG1 в целевой рабочей точке может быть запрещена. В этом случае, ECU 50 определяет результат определения на этапе S3 как отрицательный, поскольку запрос на повышение полезной отдачи не может быть удовлетворен посредством управления первой вращательной электрической машиной MG1. Соответственно, возможно пресекать увеличение потерь вследствие дифференциальных вращений планетарного зубчатого механизма 10.
Разница крутящих моментов между крутящим моментом MG1 и крутящим моментом MG2 может быть увеличена вследствие перемещения рабочей точки первой вращательной электрической машины MG1 или рабочей точки второй вращательной электрической машины MG2. Вследствие перемещения рабочей точки первой вращательной электрической машины MG1 или рабочей точки второй вращательной электрической машины MG2 разница между током, подаваемым к первой вращательной электрической машине MG1, и током, подаваемым ко второй вращательной электрической машине MG2, может быть увеличена, или разница между потреблением энергии (например, потребляемой мощностью) первой вращательной электрической машины MG1 и потреблением энергии второй вращательной электрической машины MG2 может быть увеличена. Когда разница в коэффициенте нагрузки между вращательными электрическими машинами MG1, MG2 увеличивается, количество тепла, испускаемого от вращательных электрических машин под высокой нагрузкой, возрастает.
ECU 50 препятствует тому, чтобы разница в коэффициенте нагрузки между вращательными электрическими машинами MG1, MG2 становилась больше или равным пороговому значению. Например, когда целевая рабочая точка первой вращательной электрической машины MG1, в которой запрошенная полезная отдача транспортного средства может быть реализована, определена на этапе S3 вышеупомянутого варианта осуществления, и разница между коэффициентом нагрузки первой вращательной электрической машины MG1 в целевой рабочей точке и текущим коэффициентом нагрузки второй вращательной электрической машины MG2 больше или равна пороговому значению, работа первой вращательной электрической машины MG1 в целевой рабочей точке может быть запрещена. В этом случае, ECU 50 определяет результат определения на этапе S3 как отрицательный, поскольку запрос на повышение полезной отдачи не может быть удовлетворен посредством управления первой вращательной электрической машиной MG1. Соответственно, коэффициенты нагрузки вращательных электрических машин MG1, MG2 усредняются, и тепловыделение подавляется.
Второй пример модификации варианта осуществления изобретения
Второй пример модификации вышеупомянутого варианта осуществления будет описан ниже. В вышеупомянутом варианте осуществления множество точек из возможных рабочих точек X1, X2 и X3, размещенных дискретно, могут быть выбраны в качестве целевой рабочей точки второй вращательной электрической машины MG2. Т.е., параметр управления (скорость вращения, крутящий момент), который может быть выбран в качестве целевого параметра управления второй вращательной электрической машины MG2, определяется как множество точек. Здесь, целевой параметр управления второй вращательной электрической машины MG2 может быть выбран из предварительно определенного диапазона параметра управления.
Например, целевая скорость вращения второй вращательной электрической машины MG2 может быть выбрана из предварительно определенного диапазона, включающего в себя текущую скорость вращения MG2, например, из диапазона текущей скорости вращения MG2 ±200 об/мин. Альтернативно, целевая скорость вращения второй вращательной электрической машины MG2 может быть выбрана из предварительно определенного диапазона скорости вращения MG2, например, из диапазона от 500 об/мин. до 600 об/мин. То же справедливо для крутящего момента MG2.
Третий пример модификации варианта осуществления изобретения
Возможные рабочие точки X1, X2 и X3 второй вращательной электрической машины MG2 могут соответствующим образом обновляться посредством обучения или т.п. Возможные рабочие точки X1, X2 и X3 могут соответствующим образом обновляться, например, на основе шаблона прошлого изменения запрошенной полезной отдачи, с тем, чтобы уменьшать инерционные потери вследствие перемещения рабочих точек первой вращательной электрической машины MG1 и второй вращательной электрической машины MG2.
Подробности, описанные в вышеупомянутом варианте осуществления и примерах модификации, могут соответствующим образом быть объединены и применены на практике.
Перечень ссылочных позиций
1-1: система привода транспортного средства
10: планетарный зубчатый механизм
11: солнечная шестерня
13: коронная шестерня
14: водило
20: выходная шестерня
32: ведущее колесо
50: ECU
100: транспортное средство
101: оптимальная рабочая линия для MG2
102: оптимальная рабочая линия для MG1
MG1: первая вращательная электрическая машина
MG2: вторая вращательная электрическая машина
R1: рекомендованная рабочая область
X1, X2, X3: возможная рабочая точка
Изобретение относится к системе привода транспортного средства. Система привода для транспортного средства содержит первый и второй электродвигатели и дифференциальный механизм с тремя вращающимися элементами. Первый элемент соединен с первым электродвигателем, второй - со вторым электродвигателем, а третий - с ведущими колесами. Первый и второй вращающиеся элементы расположены на противоположных сторонах относительно третьего вращающегося элемента, размещенного между ними. Электронный блок управления устанавливает область, не имеющую возможности быть выбранной в качестве целевого параметра управления в диапазоне параметра управления, который выводится посредством первого или второго электродвигателя. Также указанный блок запрещает изменения в параметре управления одного электродвигателя, пока изменяется параметр управления другого электродвигателя, и изменяет параметр управления электродвигателя с меньшей инерцией, когда транспортному средству предоставляется запрос на ускорение. Повышается эффективность движения. 3 н. и 1 з.п. ф-лы, 8 ил.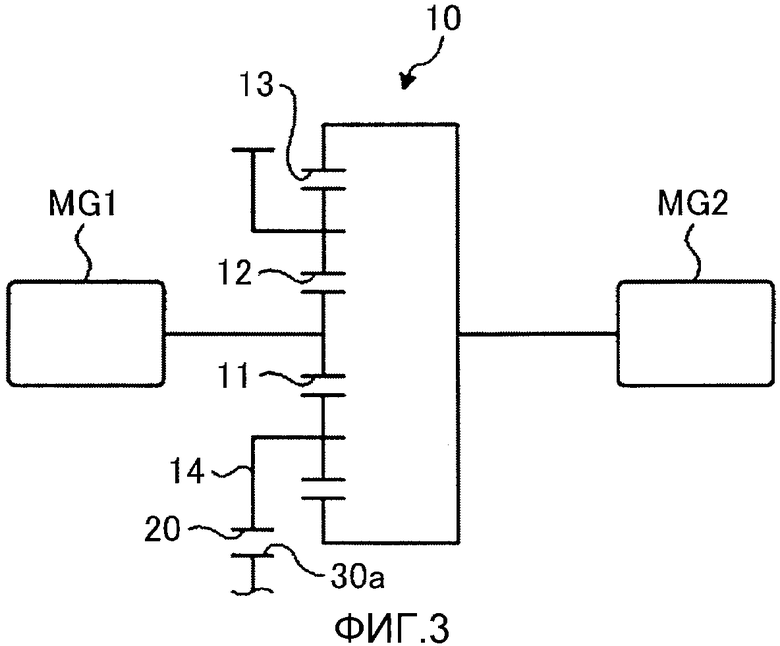
1. Система привода для транспортного средства, отличающаяся тем, что она содержит:
первый электродвигатель;
второй электродвигатель;
дифференциальный механизм (10), который включает в себя первый вращающийся элемент, второй вращающийся элемент и третий вращающийся элемент, причем первый вращающийся элемент соединен с первым электродвигателем, второй вращающийся элемент соединен со вторым электродвигателем и третий вращающийся элемент соединен с ведущими колесами, при этом первый вращающийся элемент и второй вращающийся элемент сконфигурированы расположенными на противоположных сторонах относительно третьего вращающегося элемента, размещенного между ними, в коллинеарной схеме дифференциального механизма (10); и
электронный блок (50) управления, выполненный с возможностью:
(а) установки области, которая не имеет возможности быть выбранной в качестве целевого параметра управления в диапазоне параметра управления, который имеет возможность быть выведенным посредством первого или второго электродвигателя,
(б) запрещения изменения в параметре управления одного электродвигателя из первого электродвигателя и второго электродвигателя, пока изменяется параметр управления другого электродвигателя, и
(в) предпочтительного изменения параметра управления электродвигателя, имеющего меньшую инерцию из первого электродвигателя и второго электродвигателя, когда транспортному средству предоставляется запрос на ускорение.
2. Система привода для транспортного средства, отличающаяся тем, что она содержит:
первую вращательную электрическую машину;
вторую вращательную электрическую машину;
дифференциальный механизм (10), который включает в себя первый вращающийся элемент, второй вращающийся элемент и третий вращающийся элемент, причем первый вращающийся элемент соединен с первой вращательной электрической машиной, второй вращающийся элемент соединен со второй вращательной электрической машиной и третий вращающийся элемент соединен с ведущими колесами, при этом первый вращающийся элемент и второй вращающийся элемент сконфигурированы расположенными на противоположных сторонах относительно третьего вращающегося элемента, размещенного между ними, в коллинеарной схеме дифференциального механизма (10); и
электронный блок (50) управления, выполненный с возможностью:
(а) установки области, которая не имеет возможности быть выбранной в качестве целевого параметра управления в диапазоне параметра управления, который имеет возможность быть выведенным посредством первой или второй вращательными электрическими машинами,
(б) запрещения изменения в параметре управления одной вращательной электрической машины из первой вращательной электрической машины и второй вращательной электрической машины, пока изменяется параметр управления другой вращательной электрической машины, и
(в) предпочтительного изменения параметра управления вращательной электрической машины, имеющей большую инерцию из первой вращательной электрической машины и второй вращательной электрической машины, когда транспортному средству предоставляется запрос на замедление.
3. Система привода для транспортного средства, отличающаяся тем, что она содержит:
первую вращательную электрическую машину;
вторую вращательную электрическую машину;
дифференциальный механизм (10), который включает в себя первый вращающийся элемент, второй вращающийся элемент и третий вращающийся элемент, причем первый вращающийся элемент соединен с первой вращательной электрической машиной, второй вращающийся элемент соединен со второй вращательной электрической машиной и третий вращающийся элемент соединен с ведущими колесами, при этом первый вращающийся элемент и второй вращающийся элемент сконфигурированы расположенными на противоположных сторонах относительно третьего вращающегося элемента, размещенного между ними, в коллинеарной схеме дифференциального механизма (10); и
электронный блок (50) управления, выполненный с возможностью:
(а) установки области, которая не имеет возможности быть выбранной в качестве целевого параметра управления в диапазоне параметра управления, который имеет возможность быть выведенным посредством первой или второй вращательными электрическими машинами,
(б) запрещения изменения в параметре управления одной вращательной электрической машины из первой вращательной электрической машины и второй вращательной электрической машины, пока изменяется параметр управления другой вращательной электрической машины, и
(в) когда транспортному средству предоставляется запрос на замедление, предпочтительного изменения параметра управления вращательной электрической машины, имеющей большую инерцию из первой вращательной электрической машины и второй вращательной электрической машины, при высокой скорости транспортного средства, и, когда транспортному средству предоставляется запрос на замедление, предпочтительного изменения параметра управления вращательной электрической машины, имеющей меньшую инерцию из первой вращательной электрической машины и второй вращательной электрической машины, при низкой скорости транспортного средства, которая ниже высокой скорости транспортного средства.
4. Система по любому из пп. 1-3, отличающаяся тем, что первый вращающийся элемент и второй вращающийся элемент сконфигурированы расположенными на противоположных сторонах относительно третьего вращающегося элемента, размещенного между ними, в коллинеарной схеме дифференциального механизма посредством соединения первого вращающегося элемента и третьего вращающегося элемента для передачи вращения и соединения второго вращающегося элемента и третьего вращающегося элемента для передачи вращения.
| JP 2010149840 A, 08.07.2010 | |||
| JP 2011073533 A, 14.04.2011; | |||
| JP 2003189690 A, 04.07.2003 | |||
| US 2003029653 A1, 13.02.2003.. |

